Transferability of Object-Oriented Image Analysis Methods for Slum Identification




Abstract
: Updated spatial information on the dynamics of slums can be helpful to measure and evaluate progress of policies. Earlier studies have shown that semi-automatic detection of slums using remote sensing can be challenging considering the large variability in definition and appearance. In this study, we explored the potential of an object-oriented image analysis (OOA) method to detect slums, using very high resolution (VHR) imagery. This method integrated expert knowledge in the form of a local slum ontology. A set of image-based parameters was identified that was used for differentiating slums from non-slum areas in an OOA environment. The method was implemented on three subsets of the city of Ahmedabad, India. Results show that textural features such as entropy and contrast derived from a grey level co-occurrence matrix (GLCM) and the size of image segments are stable parameters for classification of built-up areas and the identification of slums. Relation with classified slum objects, in terms of enclosed by slums and relative border with slums was used to refine classification. The analysis on three different subsets showed final accuracies ranging from 47% to 68%. We conclude that our method produces useful results as it allows including location specific adaptation, whereas generically applicable rulesets for slums are still to be developed.1. Introduction
The proliferation of slums in cities in developing countries is a major concern for local, national and international organizations. Slum eradication is a major target of the Millennium Project [1], and has drawn attention to the lack of reliable data for slum areas [2,3]. Many slums are not considered to be part of the formal city and are hence not mapped. However, access to reliable spatial and other data on slums is essential for assessing the performance of policies and programs for slum eradication. Such performance-based urban management requires reliable baseline data in order to implement programs for measuring and evaluating policy progress so that required adjustments can be made [4].
Census surveys are traditionally used for collecting data on inhabited spaces in most countries every ten years. However, given the dynamic nature especially of urban areas, available data are often outdated. In addition, slums are frequently omitted from formal statistical assessments, hence current spatial information on the concentration or location of slum dwellers is frequently absent [5,6]. Other methods, such as participatory approaches, require the involvement of local people and are therefore time-consuming and resource-intensive [7]. Remote sensing (RS) based methods can provide spatially disaggregated and regular information on slums by means of effective detection at variable spatial scales [8]. With the increasing availability of very high resolution (VHR) satellite imagery, we hypothesize that detection and characterization of slum identification can be improved.
A high level of complexity is involved in the way real-world objects are represented in remote sensing imagery [9]. This, consequently, leads to challenges in image-based detection and characterization [10]. Jain [11] studied the identification of slums in fused IKONOS images. She found that the heterogeneity of an urban environment could not be represented with a pixel-based classification approach using only spectral values. Object-oriented image analysis (OOA), also referred to as object-based image analysis (OBIA) and geographic object-based image analysis (GEOBIA), has proved to be useful and accurate in urban classification applications [12–15]. Urban areas comprise a mix of land cover features such as water, built-up (buildings and impervious) and vegetation (gardens, parks, agriculture fields). OOA-based methods have the potential to capture this heterogeneity by following a hierarchical procedure for object-classification and by including contextual information for objects and non-physical features [13]. In urban studies, this enables identification of buildings, roads, and other anthropogenic features more accurately [16]. Cleve et al. [12] showed that an object-based classification provides a higher accuracy than pixel-based classification when differentiating urban from rural land-use and land-cover categories. Additionally, with the proliferation of high-resolution imageries and their improved access, automatic object delineation techniques are being developed [17]. Specifically in the case of informal settlements, which can have a relatively complex and undefined morphology, OOA-based methods offer the potential to integrate spectral, spatial and contextual characteristics [18–20] for classification. Hofmann [19] used OOA to classify informal settlements from an IKONOS image. This work was later improved by developing a context-specific ontology to detect informal settlements using Quickbird data [5]. OOA also makes effective use of physical proxies to characterize urban attributes that are not directly observable, for example for the assessment of social vulnerability [13]. Proxy variables of vegetation coverage measured from RS images have been used in some studies to derive socio-economic variables [21–23]. A similar approach is attractive for slums and informal settlements because spectral information alone does not allow an unambiguous detection. The reflectance resulting from similar surface material composition or land cover of slum and non-slum areas can be confusing and thus additional criteria are required to avoid misclassifications.
For image-based mapping, it is important to have a clear conceptualization of slums as the objects of interest. A major challenge is that slums have diverse definitions and can have different appearance depending on their geographic setting and local context. This has led to a research gap in slum detection using RS. Previous research on slum/informal settlement mapping focused on developing context-specific methods. Kohli et al. [10] addressed this gap by developing an ontological framework to conceptualize slums using indicators related to the morphology of the built environment. The generic slum ontology (GSO) provided a comprehensive description of spatial characteristics and their relationships to represent and characterize slums from an image.
This study adapts the GSO to slums in an Indian city, followed by an OOA-based classification. For wider application of a method, it is important to test its applicability in areas of varying characteristics. Earlier studies have shown that rulesets obtained by OOA methods can be transferred and reapplied to various contexts (subsets of same image or different images) [24,25]. The transferability is defined as the degree to which a particular method is capable of providing comparable results for other images. A ruleset is easily transferable if it requires minimal manual adaptations for different imaging conditions. This study was carried out with GeoEye-1 image of the city of Ahmedabad, India (Figure 2). The objectives of this study are as follows:
Study the applicability of GSO to an Indian city by integrating expert knowledge.
Based on the knowledge from the local slum ontology, develop an OOA method for classification of slums.
Explore the transferability of the set of parameters used in the OOA method by applying it to three different image subsets of a single city.
2. Study Area
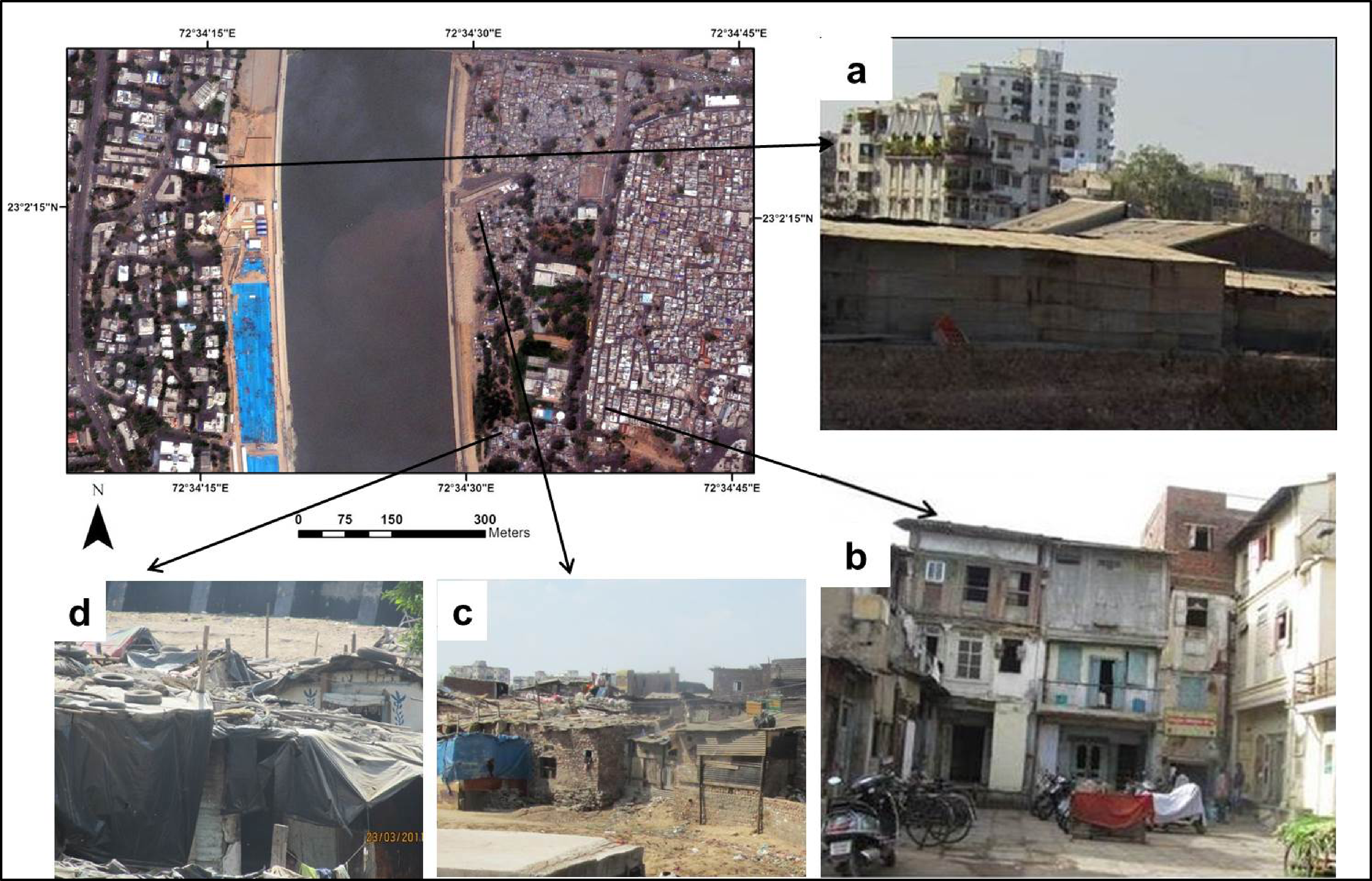
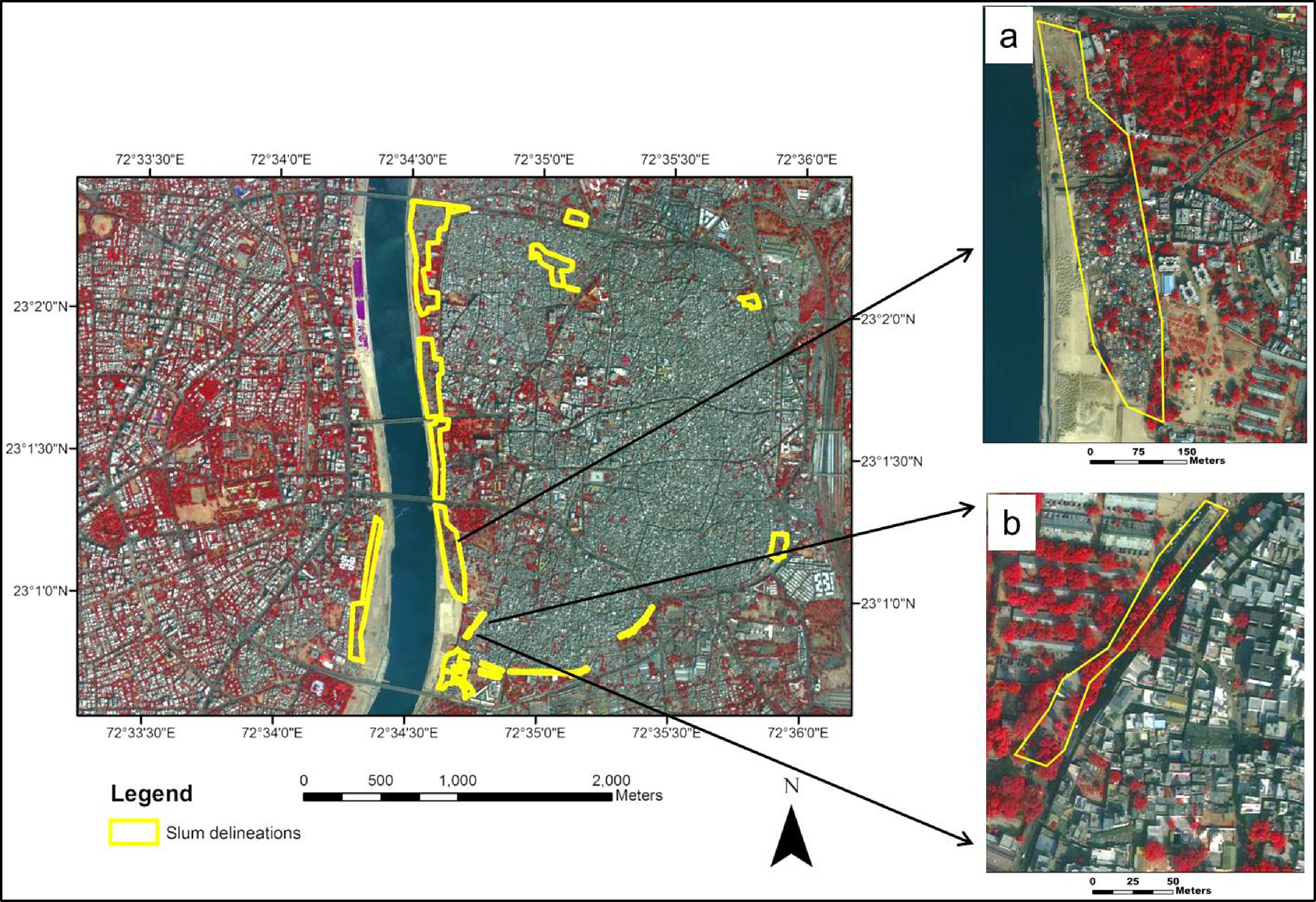
Ahmedabad, India’s seventh largest city with a population of approximately 5.5 million, covers an area of 205 km2 [26]. The city is divided into an eastern and a western part separated by the Sabarmati river. The eastern part is the Old City and includes the central town Bhadra that is characterized by the barricaded pol system of densely clustered buildings. The Old City is the historical core and is also known as “Walled City”. It was found in 1,411 AD and grew over time. The western part includes educational institutions, modern buildings, well-planned residential areas, shopping malls, multiplexes and new business districts. Slum areas are found in both parts and consist of small, self-constructed building units with roof material of tin, thatch, plastic, concrete or clay tiles [27], forming small pockets along the river and other parts of the city (Figure 1). In 2001, approximately 25% of the total population of the city lived in slums [28].
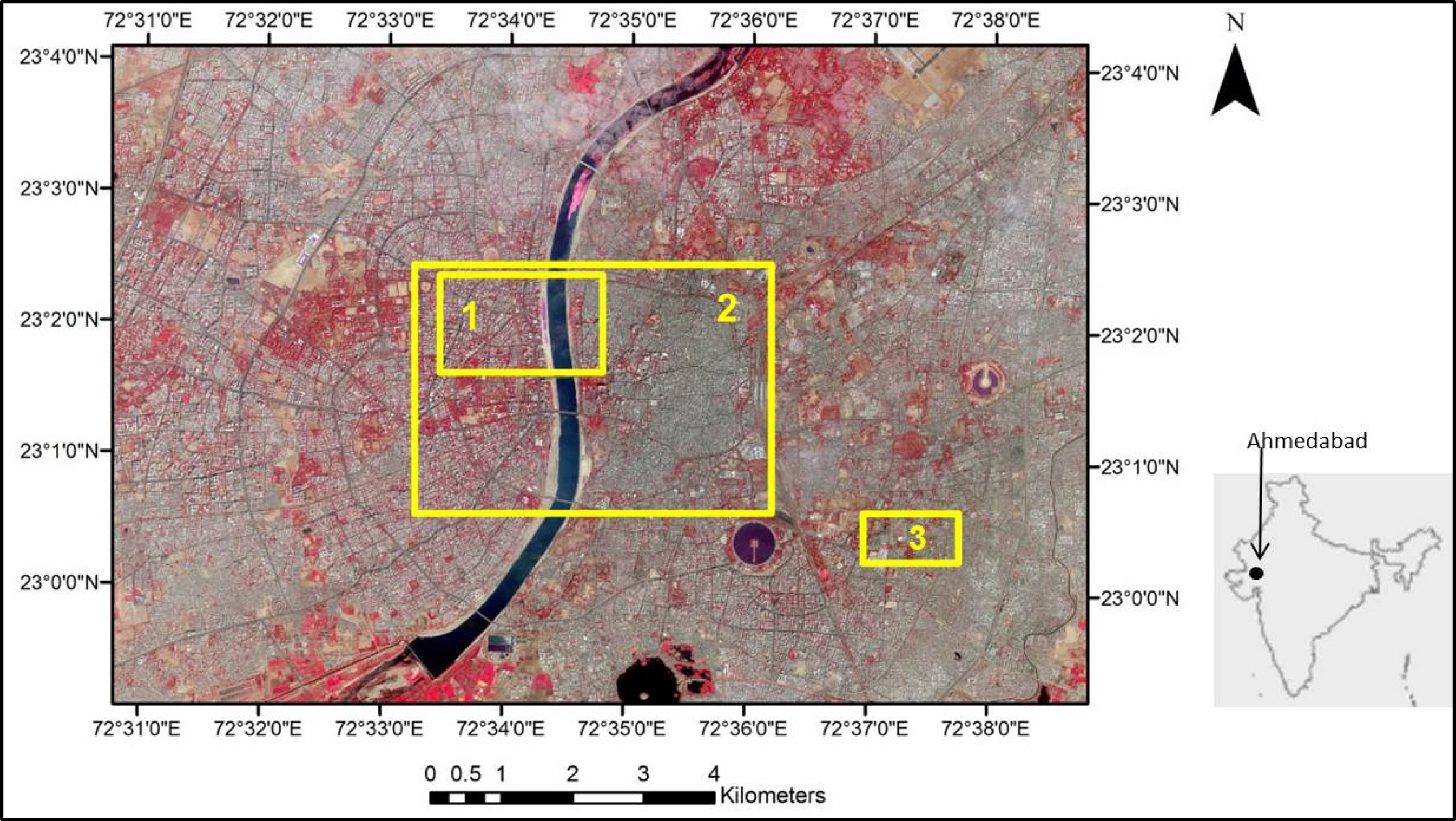
GeoEye-1 images acquired on the 8 January 2010, with a resolution of 0.5 m panchromatic and 1.65 m multispectral were used for classification. The images were obtained in standard processing level, i.e., radiometric and geometric correction was done by the image provider. A resolution merge by principal components was performed to produce a pan-sharpened image of four bands with a 0.5 m resolution [29]. A vector GIS layer depicting the boundary of the primary river was also used for classification of water. Three subsets of the GeoEye image were used to test the transferability of slum identification parameters between subsets (Figure 2).
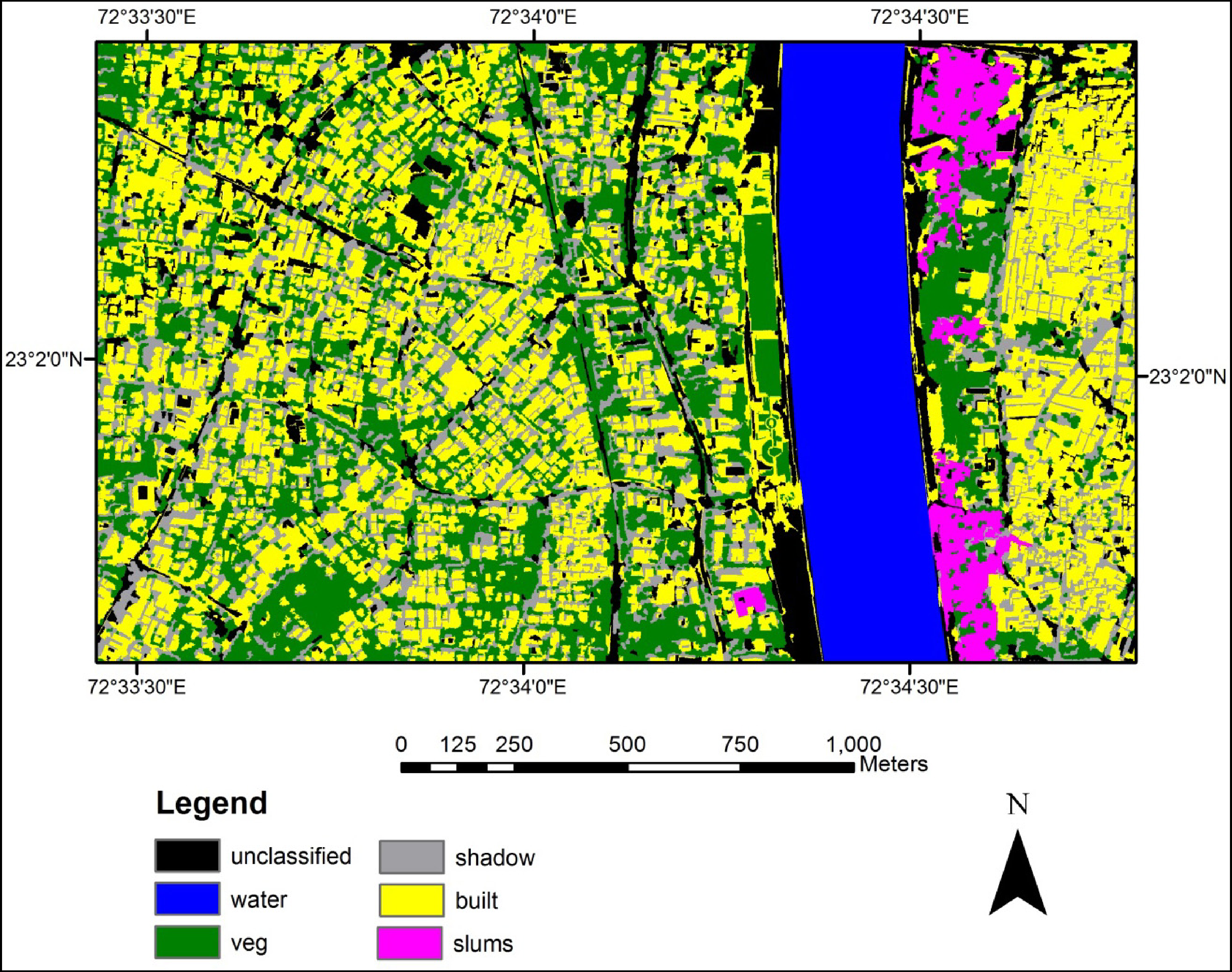
Subset-1 is part of the city center and is approximately 3 km2 in size. It comprises of vegetation, river, residential, commercial buildings and slums, with slums located mainly along the river.
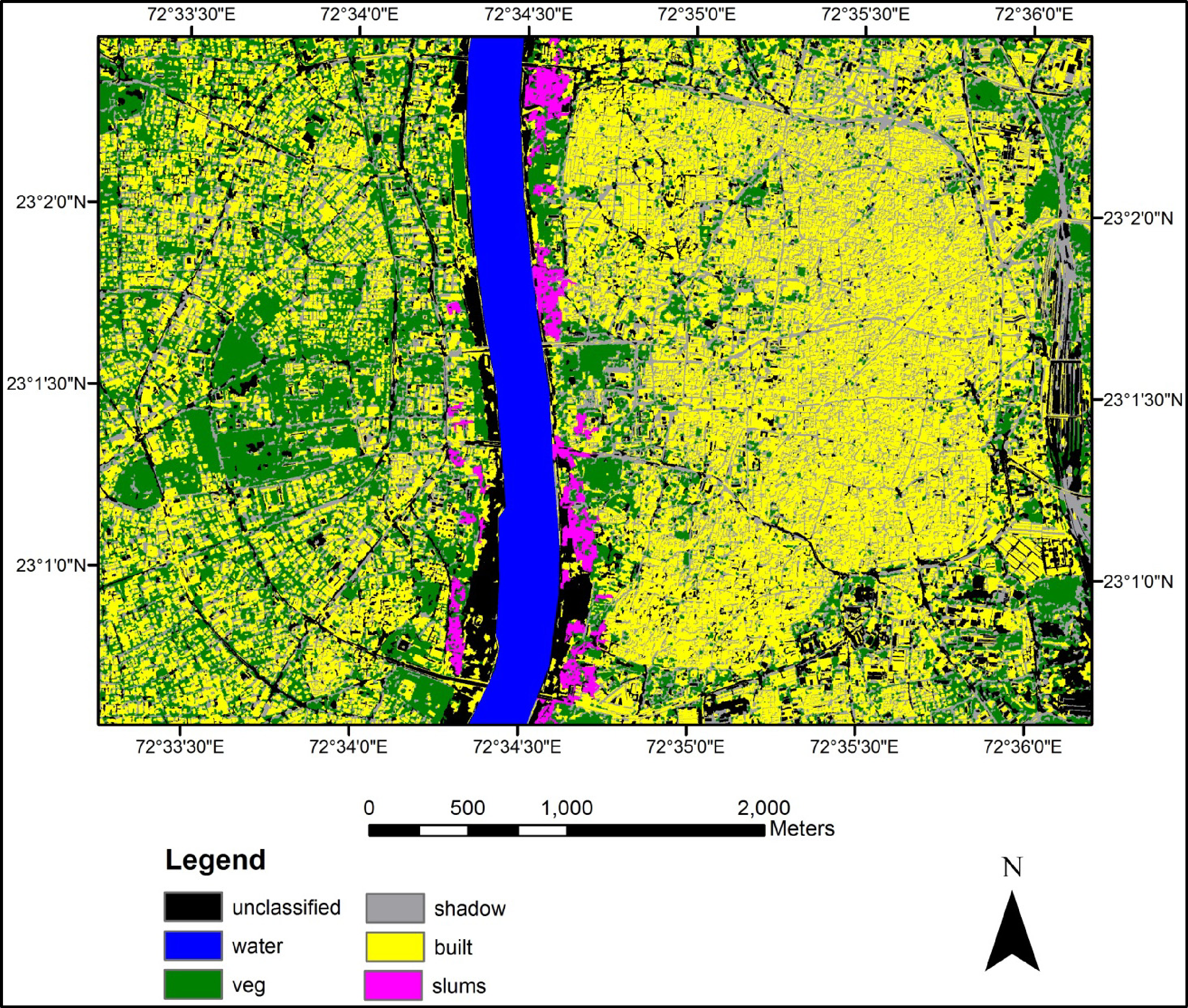
Subset-2 covers the entire city center, is much larger in size (approximately 18 km2) and includes Subset-1. By means of Subset 2, effects of enlargement can be studied.
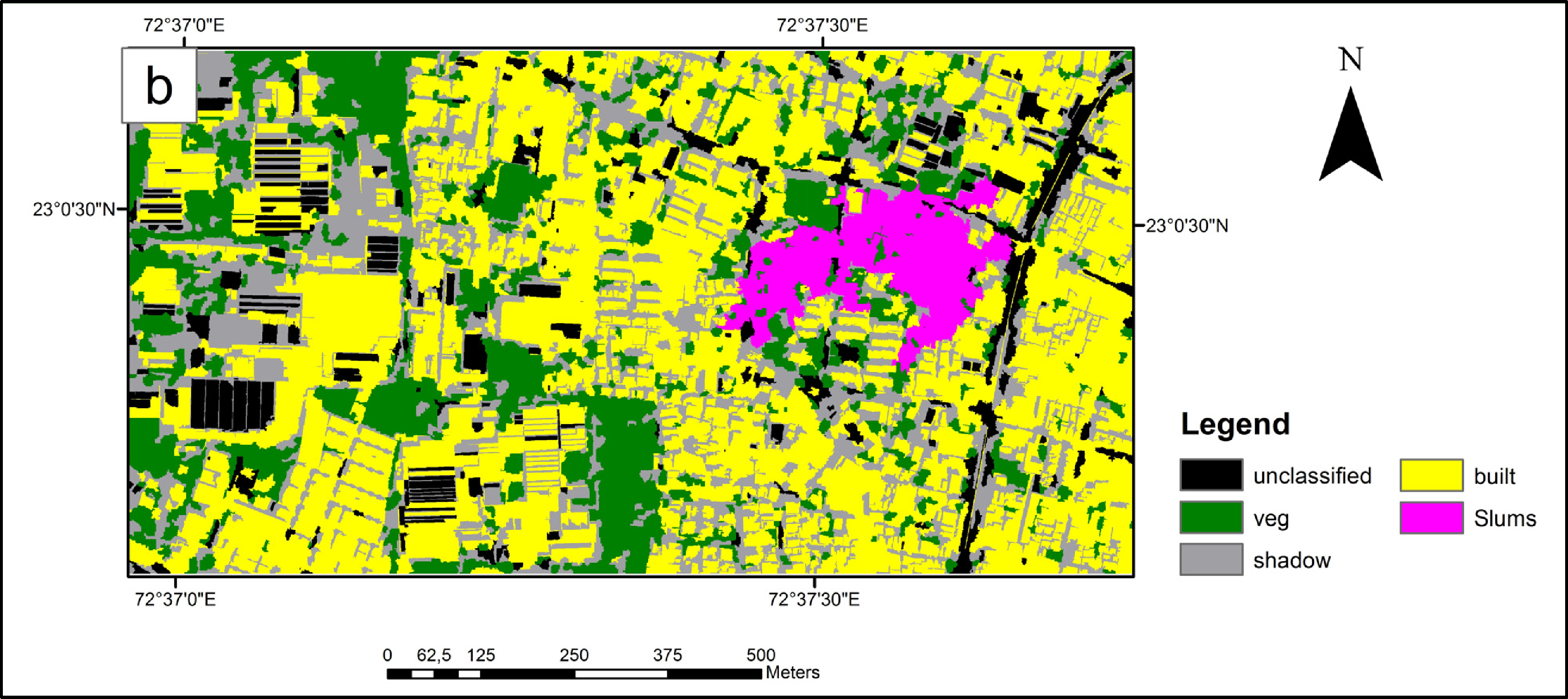
Subset-3 is part of the outer city and contains a mixture of vegetation, industrial and residential buildings and slums with slums located mainly close to factories. It is of a smaller size than Subset-1 (approximately 1 km2) and thus allows studying the effects of transferability.
In Ahmedabad, buildings are highly variable in terms of size, color, shape, tone and texture. By means of visual interpretation, using parameters such as building roof color, structure, orientation, density as well as on road characteristics, amounts and patterns of vegetation and open spaces, it was observed that there are many types of built-up areas. For example, the planned residential complexes tend to have buildings with bright white roofs that show a well-organized pattern with regular orientation and spacing, and are often separated by planned green spaces or vegetation. Some areas have buildings with grey, whitish grey or brown roofs with variable green spaces between them, and their size and orientation varies. In contrast, buildings in the Old City are relatively old, the oldest ones dating back to 15th century. They show a haphazard pattern with high density, variable orientation, and almost no vegetation and open spaces. In the absence of local knowledge, these buildings may be incorrectly interpreted as slums. Slum detection studies from satellite images need to address the problem of formal-looking informal areas, and informal-looking formal building clusters, as these may lead to severe misclassification. By formal, we refer to areas that are planned by the concerned city authorities. Informal areas generally develop organically, often built by residents themselves without approval from the authorities. Slums are often referred to as informal areas in previous literature [5,10]. The Old City is a good example of informal-looking formal building clusters. It is thus required to study and understand the context in terms of spatial characteristics of different built-up areas.
3. Method
This section provides a brief description of a local adaptation of the GSO for Ahmedabad and the methods used to develop an object-based slum classification. The ontology of a domain is defined as a formal representation of all its essential concepts and their relationships [30]. The GSO defined by Kohli et al. [10] focused on morphological indicators of the built environment, specified by the “durable housing” indicator that refers to the structural quality of a house and its location with respect to hazards [3]. The GSO used concepts at three spatial levels: object, settlement and environs. The object level referred to the characteristics of the main physical components of the settlement, i.e., the variables that relate to buildings and roads within a slum (e.g., building size and shape; regularity and width of roads). The settlement level addressed the overall form, shape and density of a slum. Finally, the environs level referred to the location of a slum with respect to surrounding areas in terms of land use and hazard-prone zones. While the GSO is a useful framework to formalize knowledge about complex features such as slums, it is also too general to be immediately useful to parameterize an image classification for a specific setting. Thus, the intermediate step is to adapt the GSO to the specific local conditions of a city.
3.1. Local Ontology of Slums in Ahmedabad
The GSO indicators were reviewed in relation to the specific morphologies observed in Ahmedabad by means of visual interpretation of imagery and discussions with eight local experts during fieldwork. These local experts were urban planners, NGO employees working in slum upgrading programs, and officials of the Ahmedabad Municipal Corporation (AMC). Relevant indicators were chosen and arranged to form a local ontology for Ahmedabad. Specific values and observations of the indicators referring to each ontological concept are given in Table 1. These were used to establish appropriate parameter settings for the OOA.
3.2. Converting Local Ontology to OOA Parameters
The local ontology guided the OOA parameterization by defining the different features for classification. Four broad categories comprising spectral range, geometry, texture and association were chosen to translate the adapted ontology to OOA parameters (Table 1). The definitions and details of all the parameters used are given in Tables 2 and 3 respectively. Conversion of ontological indicators into object-based parameters was done by integrating expert knowledge until object classification was achieved to a visually satisfying degree.
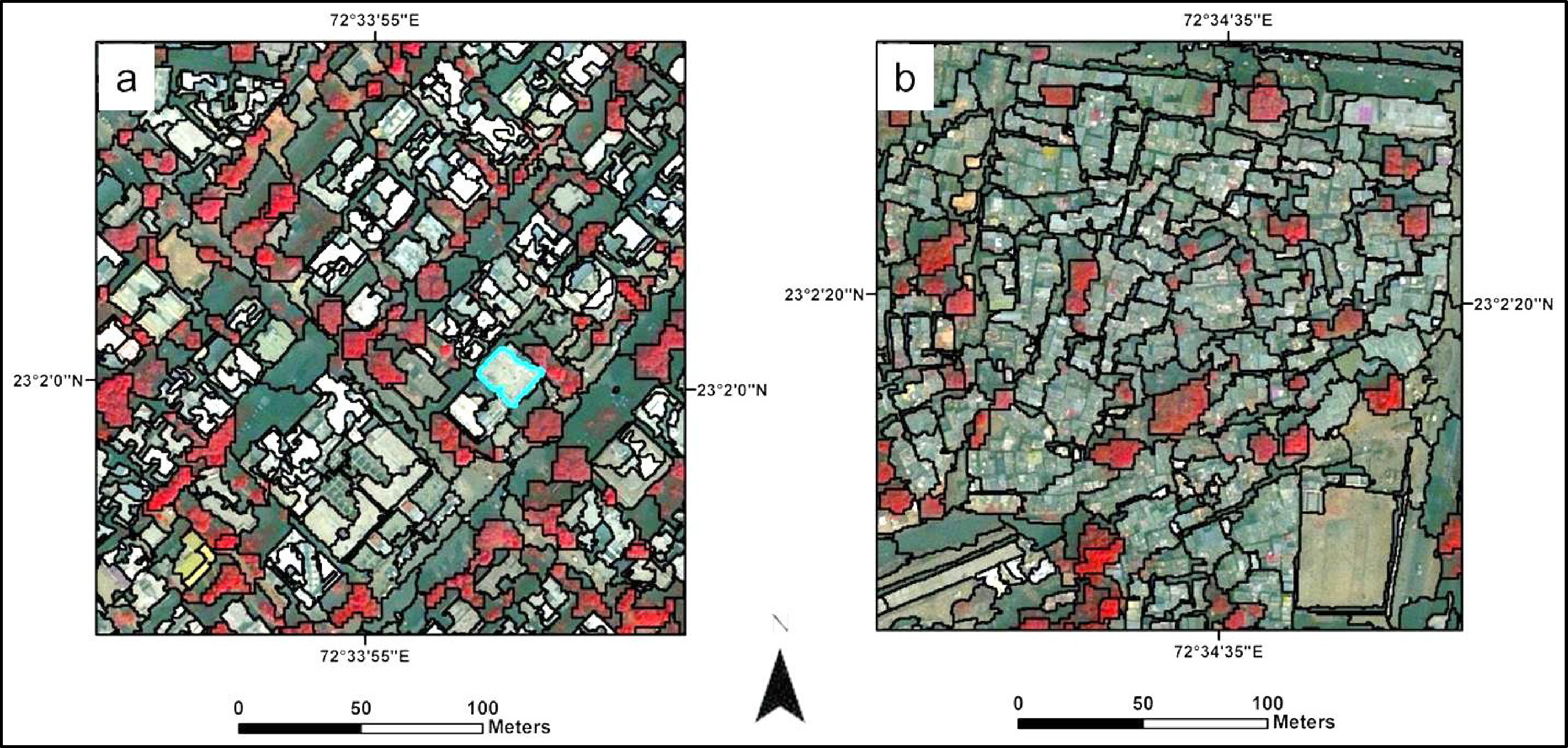
The first step in an OOA is image segmentation, i.e., dividing the image into regions or objects of homogeneous pixel values within the segmented objects. We used multi-resolution segmentation in the analysis. Multi-resolution segmentation is a bottom-up segmentation method based on a pairwise region merging technique [31]. The first step is to assign appropriate values to the key parameters, namely scale (Ψ), shape (wshape) and compactness (wcompt) to segment objects. Here, Ψ determines the maximal allowed heterogeneity of the objects. A large value of Ψ results into a low number of relatively large objects, whereas a small value for Ψ results in a large number of relatively small objects [31]. The parameter wshape balances the shape vs. the spectral homogeneity of objects as the sum of two is equal to one. A value of 0.5 was assigned to wshape to give equal weight to shape and spectral reflectance. The parameter wcompt determines the compactness of the edges of objects. The values to Ψ, wshape and wcompt are assigned based on expert knowledge and the purpose of classification [32]. Currently there is no standardized or widely accepted method for optimal scale determination for different application areas and images, though methods such as ESP (Estimation of Scale Parameter [6]) or the POF (Plateau Objective Function [33]) have been making the segmentation parameterization process easier and more transparent. In addition, in recent years the initial segmentation, and thus the above parameters, have become less important, with subsequent object shaping procedures allowing more control over the analysis process (e.g., [34]). Parameter values and segmentation results are shown in Figure 3. The segments outlining individual buildings and trees in non-slum areas and clumped buildings as objects in slum areas can clearly be seen (Figure 3).
Next, spectral (intensity, brightness), spatial (size, shape, area), textural and contextual features (relation with neighboring objects) of the resulting image objects were analyzed (Table 2). These features allowed classification of image objects into meaningful classes. A sequence of steps was repeated until all objects were classified. These steps form a ruleset that was then to be applied to the different image subsets (Table 3). The settings and adjustments made for each image subset are described below. We have to consider this within the usually taken OOA approach to have a common ruleset applicable for every subset. The accuracy assessment is discussed in the results section
3.3. Approach for Slum Identification and Classification
3.3.1. Subset-1 Part of City Center
A multi-resolution segmentation was performed to create segments that delineate meaningful objects such as the roofs of buildings and trees (Figure 3). Water was classified by using an existing polygon layer of the river. Normalized difference vegetation index (NDVI) values above 0.1 were used to classify vegetation. Shadows correspond to low brightness values in an image and were classified using mean green (MG) < 208 values. Building roof texture is homogeneous and has high entropy. GLCM entropy values, calculated using Haralick’s method [35], discriminated the built-up from other classes. GLCMEnt(R) > 3.7 was used to classify the built-up area where GLCMEnt(R) indicates the GLCM entropy for the red band.
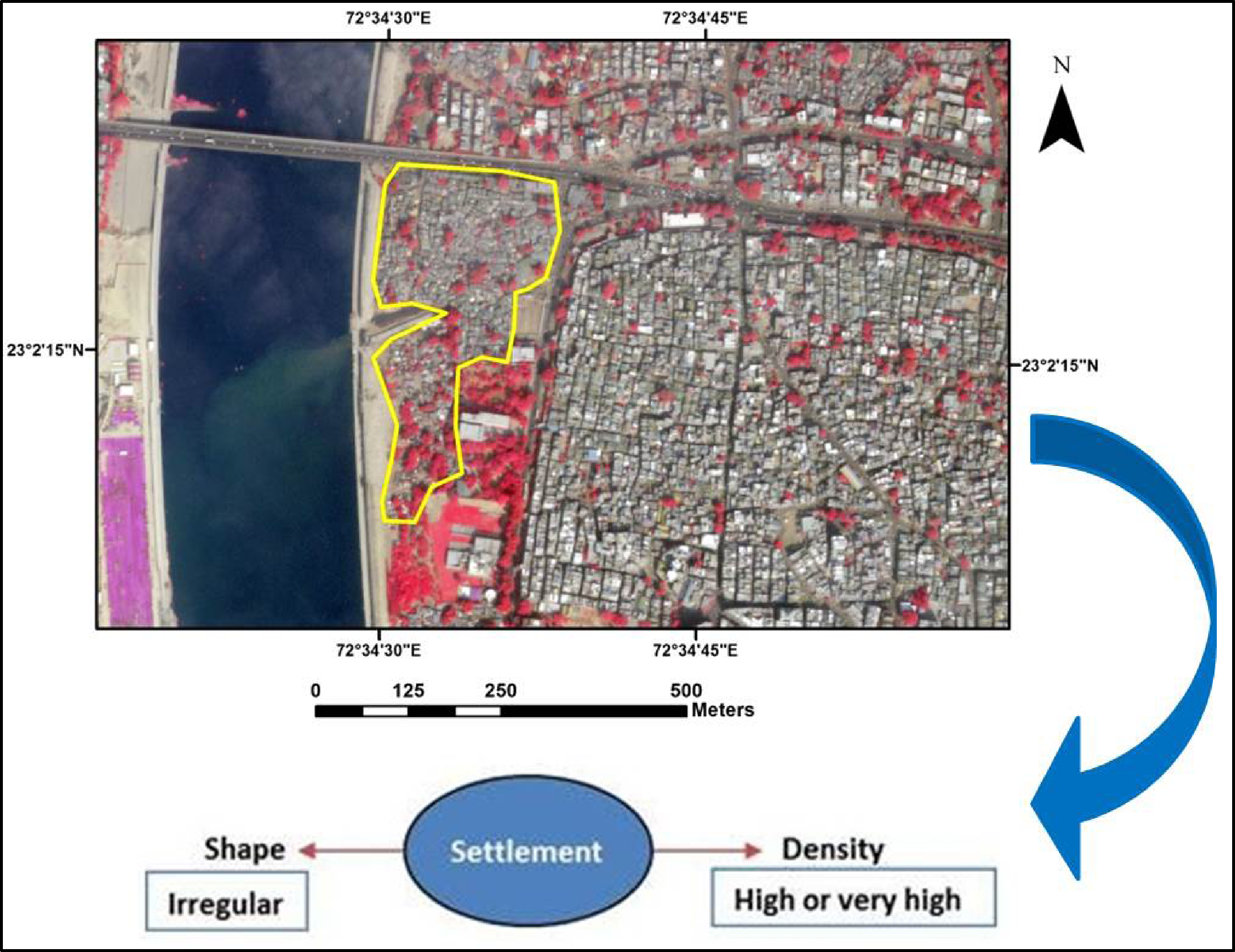
According to the local ontology of Ahmedabad, many slums have developed along the river (Table 1). The distance of the Old City from the river, calculated from the top edge of the image, is approximately 250 m. Based upon this knowledge, we defined a buffer of 250 m on either side of the river for slum classification. This prevented misclassifications in the Old City, which forms a major part of the city center. The GLCM contrast for the blue band (GLCMCon(B)), enclosedness by Slums (ES) and relative border to slums (RB(SL)) were used as parameters for slum classification within the buffer (Table 3). The GLCMCon(B) values showed different contrasts between slum and non-slum built-up. A GLCMCon(B) < 4 value corresponded to the relative homogeneity and low contrast within the slum patches. The feature ES was used to classify the misclassified slum-objects embedded within classified slums. For including the missing slums in the buffer, a threshold greater than 0.3 for RB(SL) was found appropriate. Therefore, built-up and shadow objects with a relative border > 30% with slums were reclassified as slums. Next, objects of the built-up class were merged and the variable Area was used outside the river buffer to find additional slum patches. In slums areas, due to poor contrast and the resolution that is still relatively large with respect to the size of the slum buildings, individual buildings could not be segmented. This can also be considered a limitation of spatial resolution, as building size in slums is small. The slum buildings were segmented as clumps as compared to the individual building objects in non-slum areas. Thus, a large value of Area could distinguish the slum object from the other built-up objects. Misclassifications were removed by applying additional criteria for refining the classification results as discussed in Section 3.3.4. The sequence of steps was saved as Ruleset-1.
3.3.2. Subset-2 Full City Center
Ruleset-1, developed for the city center, was applied to the larger Subset-2 area. The values for parameters Ψ, wshape and wcompt were unchanged, as was the parameter threshold for detecting vegetation. The threshold for shadow was changed to MG < 122 as the value of MG < 208 classified the entire built-up as shadow. The previous value of GLCMCon(B) < 4 could only partially classify slum patches inside the buffer and a new threshold range of GLCMCon(B) between 2.5 and 5 was used for classification of slums (Table 3). The reason for the change in thresholds is the relatively large size of Subset-2 compared to Subset-1 as a larger subset resulted in a larger number of objects. New threshold values were, as before, decided upon a qualitative evaluation of the resulting classification. The ES and RB (SL) parameter remained unchanged. Area was not used for slum classification in this ruleset, because its inclusion resulted into a large number of false-positives from the Old City. Misclassifications were removed using a clean-up operation. This modified ruleset was saved as Ruleset-2 (Table 3).
3.3.3. Subset-3 Residential and Industrial Part of Outer City
The morphology in Subset-3 is different compared to that of Subset-1. Subset-3 is characterized by large industrial roofs and residential areas in addition to slums. Ruleset-1 was applied to Subset-3 to check its transferability. Using Ruleset-1, it was possible to classify vegetation. With an unchanged MG value, the whole image was classified as shadow (excluding vegetation). MG values of building objects corresponded to the value range for shadows in Subset-1. The value for shadow classification was decreased (MG < 131) and with the same remaining steps, the image had a large number of misclassifications and low accuracy. Thus, the remaining steps of the ruleset had to be adapted by adjusting the parameters. The values for parameters Ψ, wshape and wcompt, remained unchanged, as were the thresholds for NDVI and GLCMEnt(R). Slums were detected using modified threshold values of GLCMCon(R) (5 < GLCMCon(R) < 9) followed by ES and RB (SL) respectively. There were a large number of false-positives from the industrial buildings with long roofs and other built-up areas. These misclassifications were removed using clean-up steps and the new modified steps were saved as Ruleset-3 (Table 3).
3.3.4. Clean-Up
A clean-up operation was performed to eliminate non-slum objects from the classified slums and reclassify any observed, misclassified slum-objects. For Subset-1, the parameters MG, Area, ES, and RB (SL) were used to remove misclassifications. High values of MG (>240) and low values of Area (<25,000) of merged slum objects were used to remove the false positives from other built-up objects. Subsequently, ES and RB (SL), with the same threshold as earlier (>0.3), were used to reclassify the missed slum objects. The same set of parameters was used for Subset-2 as for Subset-1, whereas values of MG and Area were modified. Non-slum buildings, classified as slums, were reclassified using a lower threshold for MG (>155). Area of objects was further used to remove misclassified built-objects. A lower value of Area (<6,000) was used to preserve the smaller slum patches in this subset. A sequence of steps using the parameters Area, MDS(R), ES, RB(SL) and Asym, were used to clean up in Subset-3. The parameters used for clean-up, MG in Subset-1, did not improve the classification. This was due to similar brightness of false-positives from non-slum buildings. Subset-3 comprised one large patch of slums. Thus after merging the slum objects, a high value of Area (<50,000) was used to remove smaller non-slum objects. Two new parameters (MDS and Asym) were added in the clean-up of Subset-3. The parameter MDS(R) (>5) could remove misclassified industrial buildings due to relatively high intensity difference in the red band. A low value of Asym can be used to define square objects. Thus, Asym (<0.5) was used to distinguish irregularly-shaped slum patch from non-slum built (Table 3; Figure 4).
3.3.5. Accuracy Assessment
To access the accuracy of the classification in the three subsets, we used manually defined samples as reference areas. These areas were delineated by a slum expert from Ahmedabad (Figure 5). The accuracy of slums was assessed by using the “error matrix based on training and test area (TTA) mask” in Definiens. The error matrix is generated by comparing classification with reference values based on pixels.
3.3.6. Identifying the Most Stable Parameters
A main aspect of this study was to provide an investigation into the transferability of rulesets from one area to the next, and from one scale level to the next. In order to do so, we assigned weights to the parameters used for classification depending on the need for adaptation from one subset to another. The purpose of weight allocation was to identify the most stable parameters used for classification. The parameters that required no change were given a bonus weight of 0.25, resulting in a maximum weight of 1. Additional weights were given depending upon the applicability of the parameter, change in their thresholds in one, two or all subsets. The significance of specific parameters for classification and weight allocation is shown in Table 4.
4. Results
For Subset-1, the parameters GLCMCon(B), ES, RB(SL) and Area were used for classification of slums. The accuracy for slums before clean-up was 56%. False-positives were removed by using MG, Area, ES and RB(SL). The accuracy assessment results after clean-up showed an accuracy of 58% of classified pixels (Figure 6). For Subset-2, the same parameters except Area were used for the classification with change in threshold for GLCMCon(B). The accuracy before clean-up was 38%. A sequence of steps using parameters MG, Area, ES and RB(SL) was used to clean-up the incorrectly classified slums. The slums in the vicinity of the river were classified with 47% accuracy after clean-up (Figure 7).
When Ruleset-1 was applied to Subset-3 (with modified MG for shadow classification) (Figure 8), the initial results were with a large number of false positives. To improve the classification the GLCMCon(R) was used with different threshold values. ES and RB(SL) were used similar to Subset-1. MDS(R) and Asym were new additions in this ruleset for removing false-positives. Subsequently, the remaining slum buildings in the proximity of existing classified slums were reclassified by using ES and RB(SL). Irregular shapes of slums from the ontology could thus be integrated by using Asym to exclude objects misclassified as slums (Figure 4). With Ruleset-3, slums in Subset-3 were classified (see Figure 8) with an accuracy of 68%.
Identifying the Most Stable Parameters
Some parameters (in italics in Table 4) were stable and could be used with some or no modification. To evaluate the stability, weights were assigned to parameters based on their applicability on different subsets. For example, the NDVI was used to classify vegetation in all three subsets with the same threshold. A bonus of 0.25 was given in such cases where the same parameter was applied to all subsets with the same threshold. Alternately, the same parameter could be used to classify features only after modifying thresholds. For example, MG could be used to classify shadow with changed thresholds in all subsets. A bonus of 0.2 was given to the parameter in such cases. There were other parameters such as GLCMCon(B) (Table 4), which worked on two subsets but not in the third. In this case, a bonus of 0.1 was assigned. NDVI, GLCMEnt(R), ES, RB(SL) followed by MG received the highest weights according to their stability (Table 4). For clean-up, ES, RB(SL) and Area were the most important parameters. Other parameters were useful but their applicability depended on the particular subset characteristics. For example, MDS(R) and Asym were useful for the specific morphology of Subset-3.
5. Discussion
The advent of VHR satellite imagery has resulted in a surge of RS-based urban studies in a variety of areas [22]. A number of these studies have focused on cities of developing countries. Most of the earlier urban models and methods were developed in and for a western context. There have been successful attempts to apply these models by adapting them to different contexts. The widespread use of landscape metrics in urban applications, which were primarily developed for American cities [36], is such an example. Nonetheless, there may be problems in adapting such approaches to the developing context. An example is the studies on determining socio-economic status of residential areas using spatial patterns and configuration, such as the vegetation, impervious surface, bare soil (V-I-S) model proposed by Ridd [37]. The V-I-S model is used to infer landuse depending on the proportional abundance of each of the land cover data. This approach may well work in most western cities but has limitations in a developing setting such as India.
For image-based analysis, it is thus important to understand the processes underlying such complexities. Slum identification and classification pose an additional challenge, because of differences in definition and appearance within and among contexts. The relatively low number of international publications on RS-based slum/informal settlement identification in India, despite the acknowledged scale and importance of the problem, substantiates the challenges involved in this area [11,38]. Our research is an attempt to take a step forward in this direction by using a systematic classification approach using an OOA guided by locally adapted generic slum ontology [10]. The use of local ontology helped us to integrate expert knowledge during classification. Slum features typically used by experts in visual interpretation and delineation served as a starting point for the application of the slum ontology. This knowledge integration is important to understand the characteristics of slums in a city. We developed a ruleset in OOA to differentiate slum from non-slum areas and explored its applicability on subsets of varying characteristics. This was different from developing three distinct rulesets independently, as it was carefully checked on which parameters changes were necessary when applying the ruleset to the other subsets. Our analysis showed that the parameters NDVI, MG, and GLCMEnt(R) were useful for basic classification of vegetation, shadow and built-up, respectively, in all three subsets. For classification of slums, GLCMCon(B), ES and RB(SL) were stable and are thus transferable parameters. Area, in terms of number of pixels, was suitable for eliminating false positives in all subsets. ES and RB(SL) were uniformly useful for reclassifying any misclassified slum objects embedded within the slums.
We used the same set of parameters to explore the scope for creating a generic ruleset that could be applied throughout the city irrespective of location and scale. Variability of the urban environment is such that a generic ruleset could not be defined. This variability is caused by the composition of different built-up areas. For example, Subset-3 comprised industrial structures in addition to residential buildings. The ruleset had to be modified to address this by using spectral value (MDS) and shape (Asym) parameter to differentiate slums. In addition, the use of different thresholds and parameters for clean-up (Table 4) is due to scene-specific adaptations. In the future, it may be a solution to have a generic definition of area types like industrial or old city and applying that to the scene to divide it into sections that could be further processed with a specific ruleset.
The same basic approach can most likely be applied to a different context with local adaptation. Once the ruleset has been finalized an efficient monitoring of slums over time (e.g., size, density, changes in road network characteristics) becomes possible, though rulesets may have to be adapted to new situations even in the same area. A further alternative to our approach based on explicitly encoded expert knowledge may be to incorporate training data based on known slums, and the use of machine learning tools such as Random Forests [39] to identify the relevant parameters that define those urban features.
Most Indian cities are complex, in terms of morphology and have a historical significance to their development. For instance, Ahmedabad, like many other Indian cities, has an old city core known as the “Walled City” which developed over 6 centuries ago. During our field visit to Ahmedabad, many buildings in the Old City were found to be dilapidated and precarious, and effectively constituting slum buildings (Figure 1). After discussion with one of the local experts, we found that the architecture and planning in the Old City was predesigned to promote community living and security in case of communal riots. Based on the cultural and historic importance of the Old City, the Archaeological Survey of India (ASI) has nominated it for Unesco’s world heritage list [40]. The unique architecture comprises “Pol housing”, typically consisting of closely packed houses with a common backyard for people from one community (Figure 1). In the absence of detailed ground knowledge, it is difficult to differentiate these congested areas from slums in the imagery. This was a limitation of RS-based slum identification and, thus, required a customized approach. We used expert knowledge integrated in the slum ontology to address this problem. Creation of buffer areas on either side of the river reduced the area of analysis for Subset-1 and 2, reducing the misclassifications from the Old City. The possibility of missing slums within the Old City remains, but this is more of a problem of slum definition. Our method does provide a set of stable parameters that worked on subsets of varying characteristics in an Indian city. It may work well if there are no slums outside the river buffer, but care must be taken not to use such an approach in an area with completely different characteristics.
The accuracy values for the three subsets range from 47% to 68% (after clean-up). In the absence of reliable data, the delineations of slums by a local planner were used as reference (Figure 5). However, the question remains whether such reference data are a suitable benchmark for accuracy assessment. The amount of generalization an expert introduces in delineating can impact the accuracy results substantially, while the conceptualization used to define slums may also differ. However, in a data poor environment, this approach was the best-suited to get an unbiased validation. This problem is accentuated by the fact that there are political, administrative as well as physical aspects related to slum definitions. An inherit problem of vegetation cover hindering the detection of slum buildings also remains (Figure 5). Considering that only morphological indicators derived from images were used for classification, the accuracy results are acceptable. Additional information in the form of GIS layers may be helpful in refining the results further. For example, slum areas tend to have community water connections instead of individual taps in each household. If detailed data on water connections are available, it can be integrated with population of a settlement. A scenario with settlements of dense population with few water connections could then be used to find probable slums. Similarly, data on other utilities such as electricity or gas connections may also be useful. Such additional information may also address the problem of distinguishing formal-looking informal areas, and informal-looking formal building clusters. For example, the road-side shops and markets in many Indian cities have structural similarity to slum areas. We recommend such investigation for future research in slum identification studies.
6. Conclusions
Slum detection studies need to incorporate the issue of variable definitions and appearance of slums in different contexts. To include contextual knowledge, we use expert knowledge encoded in an ontological framework to classify slums in the city of Ahmedabad, India. Using the generic slum ontology as a basis, we tested the transferability of an Object-oriented image analysis (OOA) method for slum classification developed on one image area to other image areas. Our analysis identified textural features derived from a grey level co-occurrence matrix (GLCM) such as entropy (GLCMEnt) and contrast ((GLCMCon), relation with classified slum objects, in terms of enclosed by slums (ES) and relative border with slums (RB) and the size of image segments (Area) as stable parameters for classification of built-up areas and slum identification. These parameters worked on all the subsets with minimal adaptation and thus, can be considered as most transferable. The analysis on three different subsets shows accuracies ranging from 47% to 68%. The rulesets and further images will be placed on our website [41]. The applicability of our OOA-based detection method in other cultural spheres remains to be tested.
Acknowledgments
We thank the GeoEye Foundation for providing GeoEye-1 images for this research. We would also like to thank Sulochana Sekhar for her valuable advice during the execution of this research and to the three anonymous reviewers who greatly helped to improve the manuscript.
Conflict of Interest
The authors declare no conflict of interest.
References
- Millenium Project. Available online: http://www.unmillenniumproject.org (accessed on 30 July 2013).
- United Nations Human Settlements Programme (UN-HABITAT). State of World’s Cities 2010/2011; Earthscan: London, UK, 2010. [Google Scholar]
- United Nations Human Settlements Programme (UN-HABITAT). Slums of the World: The Face of Urban Poverty in the New MILLENNIUM; Global Urban Observatory: Nairobi, Kenya, 2003. [Google Scholar]
- McGill, R. Urban management performance: An assessment framework for Third World city managers. Cities 1995, 12, 337–351. [Google Scholar]
- Hofmann, P.; Strobl, J.; Blaschke, T.; Kux, H. Detecting Informal Settlements from Quickbird Data in Rio De Janeiro Using An Object Based Approach. In Object-Based Image Analysis; Springer: Berlin, Germany, 2008; pp. 531–553. [Google Scholar]
- Paar, P.; Rekittke, J. Low-cost mapping and publishing methods for landscape architectural analysis and design in slum-upgrading projects. Future Internet 2011, 3, 228–247. [Google Scholar]
- Joshi, P.; Sen, S.; Hobson, J. Experiences with surveying and mapping Pune and Sangli slums on a geographical information system (GIS). Environ. Urban 2002, 14, 225–240. [Google Scholar]
- Stoler, J.; Daniels, D.; Weeks, J.R.; Stow, D.A.; Coulter, L.L.; Finch, B.K. Assessing the utility of satellite imagery with differing spatial resolutions for deriving proxy measures of slum presence in Accra, Ghana. GISci. Remote Sens 2012, 49, 31–52. [Google Scholar]
- Blaschke, T.; Lang, S.M.; Hay, G.J. Object Based Image Analysis: Spatial Concepts for Knowledge—Driven Remote Sensing Applications; Springer: Berlin, Germany, 2008. [Google Scholar]
- Kohli, D.; Sliuzas, R.; Kerle, N.; Stein, A. An ontology of slums for image-based classification. Comput. Environ. Urban Syst 2012, 36, 154–163. [Google Scholar]
- Jain, S. Use of IKONOS satellite data to identify informal settlements in Dehradun, India. Int. J. Remote Sens 2007, 28, 3227–3233. [Google Scholar]
- Cleve, C.; Kelly, M.; Kearns, F.R.; Moritz, M. Classification of the wildland-urban interface: A comparison of pixel- and object-based classifications using high-resolution aerial photography. Comput. Environ. Urban Syst 2008, 32, 317–326. [Google Scholar]
- Ebert, A.; Kerle, N.; Stein, A. Urban social vulnerability assessment with physical proxies and spatial metrics derived from air- and space-borne imagery and GIS data. Nat. Hazard 2009, 48, 275–294. [Google Scholar]
- Sliuzas, R.V.; Kerle, N.; Kuffer, M. Object-Oriented Mapping of Urban Poverty and Deprivation. Proceedings of EARSeL Workshop on Remote Sensing for Developing Countries in Conjunction with GISDECO 8, Istanbul, Turkey, 5–7 June 2008.
- Salehi, B.; Zhang, Y.; Zhong, M.; Dey, V. Object-based classification of urban areas using VHR imagery and height points ancillary data. Remote Sens 2012, 4, 2256–2276. [Google Scholar]
- Lang, S. Object-Based Image Analysis for Remote Sensing Applications: Modeling Reality—Dealing with Complexity. In Object-Based Image Analysis; Springer: Berlin, Germany, 2008; pp. 3–27. [Google Scholar]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm 2010, 65, 2–16. [Google Scholar]
- Niebergall, S.; Loew, A.; Mauser, W. Object-Oriented Analysis of Very High-Resolution QuickBird Data for Mega City Research in Delhi/India. Proceedings of Urban Remote Sensing Joint Event, Paris, France, 11–13 April 2007; pp. 1–8.
- Hofmann, P. Detecting Informal Settlements from Ikonos Image Data Using Methods of Object Oriented Image Analysis—An Example from Cape Town (South Africa). Proceedings of Remote Sensing of Urban Areas, Regensburg, Germany, 22–23 June 2001.
- Oleire-Oltmanns, S.; Coenradie, B.; Kleinschmit, B. An object-based classification approach for mapping migrant housing in the mega-urban area of the Pearl River Delta (China). Remote Sens 2011, 3, 1710–1723. [Google Scholar]
- Stow, D.; Lopez, A.; Lippitt, C.; Hinton, S.; Weeks, J. Object-based classification of residential land use within Accra, Ghana based on QuickBird satellite data. Int. J. Remote Sens 2007, 28, 5167–5173. [Google Scholar]
- Patino, J.E.; Duque, J.C. A review of regional science applications of satellite remote sensing in urban settings. Comput. Environ. Urban Syst 2013, 37, 1–17. [Google Scholar]
- Weeks, J.; Hill, A.; Stow, D.; Getis, A.; Fugate, D. Can we spot a neighborhood from the air? Defining neighborhood structure in Accra, Ghana. GeoJournal 2007, 69, 9–22. [Google Scholar]
- Walker, J.S.; Blaschke, T. Object-based land-cover classification for the Phoenix metropolitan area: optimization vs. transportability. Int. J. Remote Sens 2008, 29, 2021–2040. [Google Scholar]
- Hofmann, P.; Blaschke, T.; Strobl, J. Quantifying the robustness of fuzzy rule sets in object-based image analysis. Int. J. Remote Sens 2011, 32, 7359–7381. [Google Scholar]
- Census of India (COI) 2011; India Ministry of Home Affairs: New Delhi, India, 2011.
- Bhatt, M. Urban Slums Reports: The Case of Ahmedabad, India; Global Report on Human Settlements (UN-HABITAT); Earthscan: London, UK, 2003. [Google Scholar]
- Census of India (COI) 2001; India Ministry of Home Affairs: New Delhi, India, 2001.
- Lu, D.S.; Weng, Q.H. Urban classification using full spectral information of Landsat ETM+ imagery in Marion County, Indiana. Photogramm. Eng. Remote Sens 2005, 71, 1275–1284. [Google Scholar]
- Sowa, J.F. Knowledge Representation: Logical, Philosophical and Computational Foundations; Brooks Cole Publishing Co.: Pacific Grove, CA, USA, 2000. [Google Scholar]
- Benz, U.C.; Hofmann, P.; Willhauck, G.; Lingenfelder, I.; Heynen, M. Multi-resolution, object-oriented fuzzy analysis of remote sensing data for GIS-ready information. ISPRS J. Photogramm 2004, 58, 239–258. [Google Scholar]
- Baatz, M.; Schäpe, A. Multiresolution Segmentation: An Optimization Approach for High Quality Multi-Scale Image Segmentation. In Angewandte Geographische Informationsverarbeitung XII. Beiträge zum AGIT-Symposium Salzburg 2000; Strobl, J., Ed.; Herbert Wichmann Verlag: Karlsruhe, Germany, 2000; pp. 12–23. [Google Scholar]
- Martha, T.R.; Kerle, N.; van Westen, C.J.; Jetten, V.; Kumar, K.V. Segment optimization and data-driven thresholding for knowledge-based landslide detection by object-based image analysis. IEEE Trans. Geosci. Remote Sens 2011, 49, 4928–4943. [Google Scholar]
- Martha, T.R.; Kerle, N.; van Westen, C.J.; Jetten, V.; Kumar, K.V. Object-oriented analysis of multi-temporal panchromatic images for creation of historical landslide inventories. ISPRS J. Photogramm 2012, 67, 105–119. [Google Scholar]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I.H. Textural features for image classification. IEEE Trans. Syst. Man Cybern 1973, 3, 610–621. [Google Scholar]
- Herold, M.; Liu, X.; Clarke, K.C. Spatial metrics and image texture for mapping urban land use. Photogramm. Eng. Remote Sensing 2003, 69, 991–1001. [Google Scholar]
- Ridd, M.K. Exploring a V-I-S (vegetation-impervious surface-soil) model for urban ecosystem analysis through remote sensing: Comparative anatomy for cities. Int. J. Remote Sens 1995, 16, 2165–2185. [Google Scholar]
- Kit, O.; Ludeke, M.; Reckien, D. Texture-based identification of urban slums in Hyderabad, India using remote sensing data. Appl. Geogr 2012, 32, 660–667. [Google Scholar]
- Stumpf, A.; Kerle, N. Object-oriented mapping of landslides using random forests. Remote Sens. Environ 2011, 115, 2564–2577. [Google Scholar]
- United Nations Educational, Scientific and Cultural Organisation (UNESCO). Historic City of Ahmadabad. Available online: http://whc.unesco.org/en/tentativelists/5616/ (accessed on 27 July 2013).
- Object-Oriented Image Analysis (OOA) Group. Available online: www.itc.nl/ooa-group (accessed on 25 April 2013).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Ontological Concepts | Interpretation Element | Local Slum Ontology for Ahmedabad | OOA Parameterization |
|---|---|---|---|---|
| Environs | Location | Pattern, primary data | Proximity to highways, major roads, railways, lakes, drainage and along river that are prone to seasonal flooding | Association-Distance to river |
| Neighborhood characteristics | Pattern, primary data | Proximity to employment opportunities such as CBD, middle/high socio-economic status neighborhoods | Not used due to absence of spatial data on the socio-economic status | |
| Settlement level | Shape | Pattern | Irregular shape, elongated shapes along linear features | Geometry-Buffer for slums along the river |
| Density | Texture | Roof coverage > 80% Amount of vegetation/open spaces < 10% | Texture-Entropy, Contrast Geometry-Area of built-up | |
| Object level | Building | Shape Size Material Color Orientation | variable Range of values:10 to 40 m2 Roofs: corrugated iron sheets, tin, concrete, plastic, tiles, thatch Range: grey, brown, white Haphazard, clumped together | Geometry-Asymmetry Geometry-Area Spectral-Layer mean value Spectral-Layer mean value |
| Access network | Shape Type Width | Irregular Paved/unpaved access streets Range-variable | Not used due to limitation of spatial resolution. Access streets are not visible in highly dense slums | |
| Parameter | Description | Definition |
|---|---|---|
| NDVI | Normalized difference vegetation index | An index developed to measure vegetation, defined as (near-infrared (NIR) − red)/(NIR + red) |
| MG | Mean green | The mean intensity of all pixels forming an image object in the green band. |
| RB(SL) | Relative border to slums | The ratio of the shared border length of an image object (with a neighboring image object assigned to a defined class) to the total border length. |
| GLCM | Grey level co-occurrence matrix | Proximal combinations of pixel brightness values (grey levels) within a particular band of an image. |
| GLCMEnt(R) | GLCM entropy for red band | The measure of orderliness within a band of an image and relates to textural homogeneity. |
| GLCMCon(R) and GLCMCon(B) | GLCM contrast for red and blue band | The amount of local variation within a band of an image. |
| Merge | Merge region | Neighboring image objects of the same class are merged. |
| Area | Area of object | The number of pixels forming an image object. |
| Asym | Asymmetry | The ratio of the lengths of minor and major axes of an ellipse approximation of the object. |
| ES | Enclosedness by slums | Image objects that are completely enclosed by objects belonging to selected class. |
| MDS(R) | Mean diff. to scene for red band | Difference between the mean intensity of a band and all pixels forming an image object in the same band. |
| Seq No. | Classification Steps | Ruleset-1 for Subset-1 | Ruleset-2 forSubset-2 | Ruleset-3 for Subset-3 |
|---|---|---|---|---|
| 1 | Classify Water | Multiresolution segmentation using thematic layer | Multiresolution segmentation using thematic layer | No water body |
| 2 | Object creation | Multiresolution segmentation (Ψ = 40, wshape = 0.5, wcompt = 0.5) | ||
| 3 | Classify Vegetation | NDVI > 0.1 | ||
| 4 | Classify Shadows | MG < 208 | MG < 122 | MG < 131 |
| 5 | Classify Built-up | GLCMEnt(R) > 3.7 | ||
| 6 | Buffer along river | Within 500 Pixels | Within 500 Pixels | No buffer |
| 7 | Classify Slums | GLCMCon(B) < 4, ES, RB(SL) > 0.3, 62,000 < Area < 63,000 | 2.5 > GLCMCon(B) < 5, ES, RB(SL) >0.3 | 5 < GLCMCon(R) < 9 ES, RB(SL) >0.3 |
| 8 | Clean-up | MG > 240, Area < 25,000, ES, RB(SL) > 0.3 | MG > 155, Area < 6,000, ES, RB(SL) > 0.3 | Area < 50,000, MDS(R) > 5, ES, RB(SL) > 0.3, Asym < 0.5 |
| Class | Parameter | Subset-1 | Subset-2 | Subset-3 | Bonus | Total |
|---|---|---|---|---|---|---|
| Vegetation | NDVI | 0.25 | 0.25 | 0.25 | 0.25 | 1 |
| Shadow | MG | 0.25 | 0.25 | 0.25 | 0.2 | 0.95 |
| Built-up | GLCMEnt(R) | 0.25 | 0.25 | 0.25 | 0.25 | 1 |
| Slums | GLCMCon(B) | 0.25 | 0.25 | 0 | 0.1 | 0.6 |
| GLCMCon(R) | 0 | 0 | 0.25 | 0 | 0.25 | |
| ES | 0.25 | 0.25 | 0.25 | 0.25 | 1 | |
| RB(SL) | 0.25 | 0.25 | 0.25 | 0.25 | 1 | |
| Clean-up | MG | 0.25 | 0.25 | 0 | 0.1 | 0.6 |
| Area | 0.25 | 0.25 | 0.25 | 0.2 | 0.95 | |
| ES | 0.25 | 0.25 | 0.25 | 0.25 | 1 | |
| RB(SL) | 0.25 | 0.25 | 0.25 | 0.25 | 1 | |
| MDS(R) | 0 | 0 | 0.25 | 0 | 0.25 | |
| Asym | 0 | 0 | 0.25 | 0 | 0.25 | |
© 2013 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Kohli, D.; Warwadekar, P.; Kerle, N.; Sliuzas, R.; Stein, A. Transferability of Object-Oriented Image Analysis Methods for Slum Identification. Remote Sens. 2013, 5, 4209-4228. https://doi.org/10.3390/rs5094209
Kohli D, Warwadekar P, Kerle N, Sliuzas R, Stein A. Transferability of Object-Oriented Image Analysis Methods for Slum Identification. Remote Sensing. 2013; 5(9):4209-4228. https://doi.org/10.3390/rs5094209
Chicago/Turabian StyleKohli, Divyani, Pankaj Warwadekar, Norman Kerle, Richard Sliuzas, and Alfred Stein. 2013. "Transferability of Object-Oriented Image Analysis Methods for Slum Identification" Remote Sensing 5, no. 9: 4209-4228. https://doi.org/10.3390/rs5094209
APA StyleKohli, D., Warwadekar, P., Kerle, N., Sliuzas, R., & Stein, A. (2013). Transferability of Object-Oriented Image Analysis Methods for Slum Identification. Remote Sensing, 5(9), 4209-4228. https://doi.org/10.3390/rs5094209