Survey and Classification of Large Woody Debris (LWD) in Streams Using Generated Low-Cost Geomatic Products


 , and
, and 
Abstract
:
1. Introduction
- Reduction of effective channel section, decreasing the natural capacity to transport water and increasing the risk of flooding.
- River stabilization; previously, LWD was believed to impair river stabilization by causing scouring of the river bed. However, recent research has shown that strategic placement of LWD can actually stabilize river banks and reduce erosion.
- River navigation; LWD can be hazardous to river navigation.
- Flood mitigation; LWD may hinder water flow and cause flooding in some situations (for example, where large debris dams are formed). However, in most cases, removal results in minimal improvement of channel capacity and a reduction of flooding in lowland rivers. LWD, particularly large tree trunks within the channel, was previously thought to impede water flow and result in additional flooding. We now know that a channel needs to be substantially blocked by LWD before there is any measurable effect on the water level. For example, at a particular location on the channel, the cross-sectional area of LWD needs to be at least 10% of the whole channel before a significant effect on water levels is likely [10].
- Human use; LWD in the riparian zone is often removed for firewood collection, agricultural purposes and other activities.
2. Materials and Methods
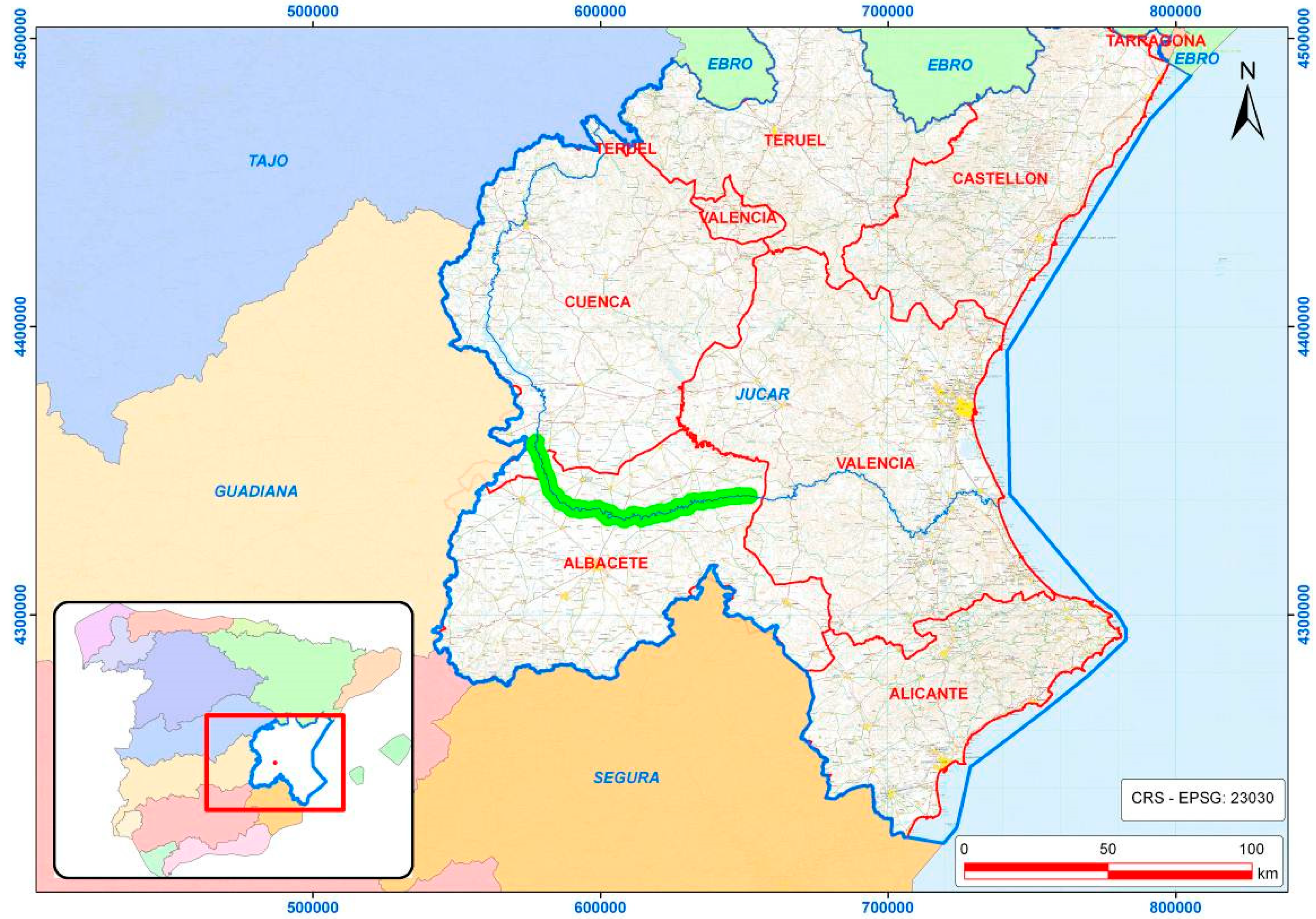
2.1. The Case Study


2.2. Requirements of the Geomatic Product and Available Products
- PNOA 2009 orthoimage, with a GSD = 0.25 m and mean square error (MSE) = 0.5 m.
- Digital terrain model (DTM) with a 5-m grid and 2-m accuracy.
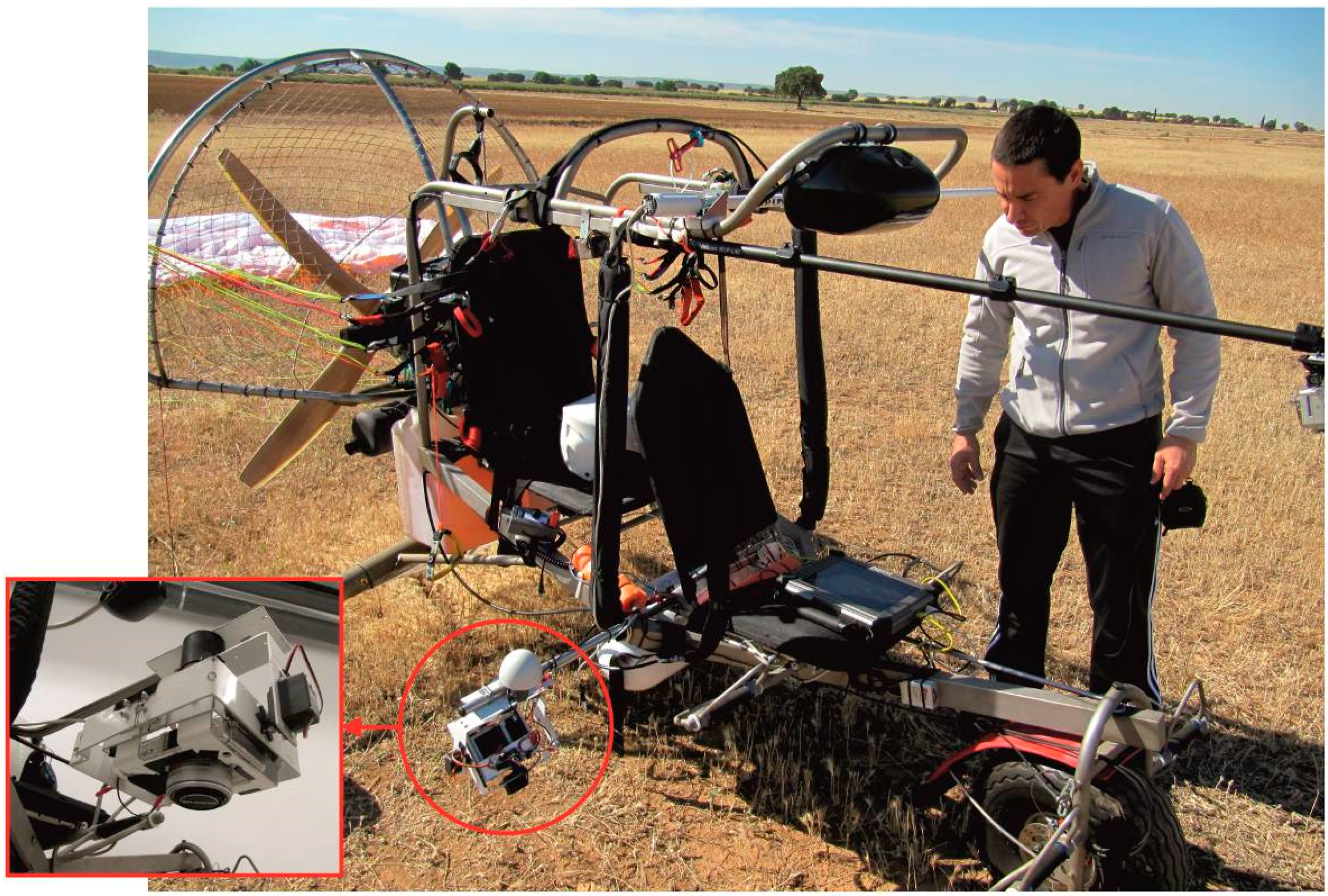
2.3. Description of the Aircraft and Payload Utilized

2.4. Flight Planning and Execution
2.5. Photogrammetry Workflow
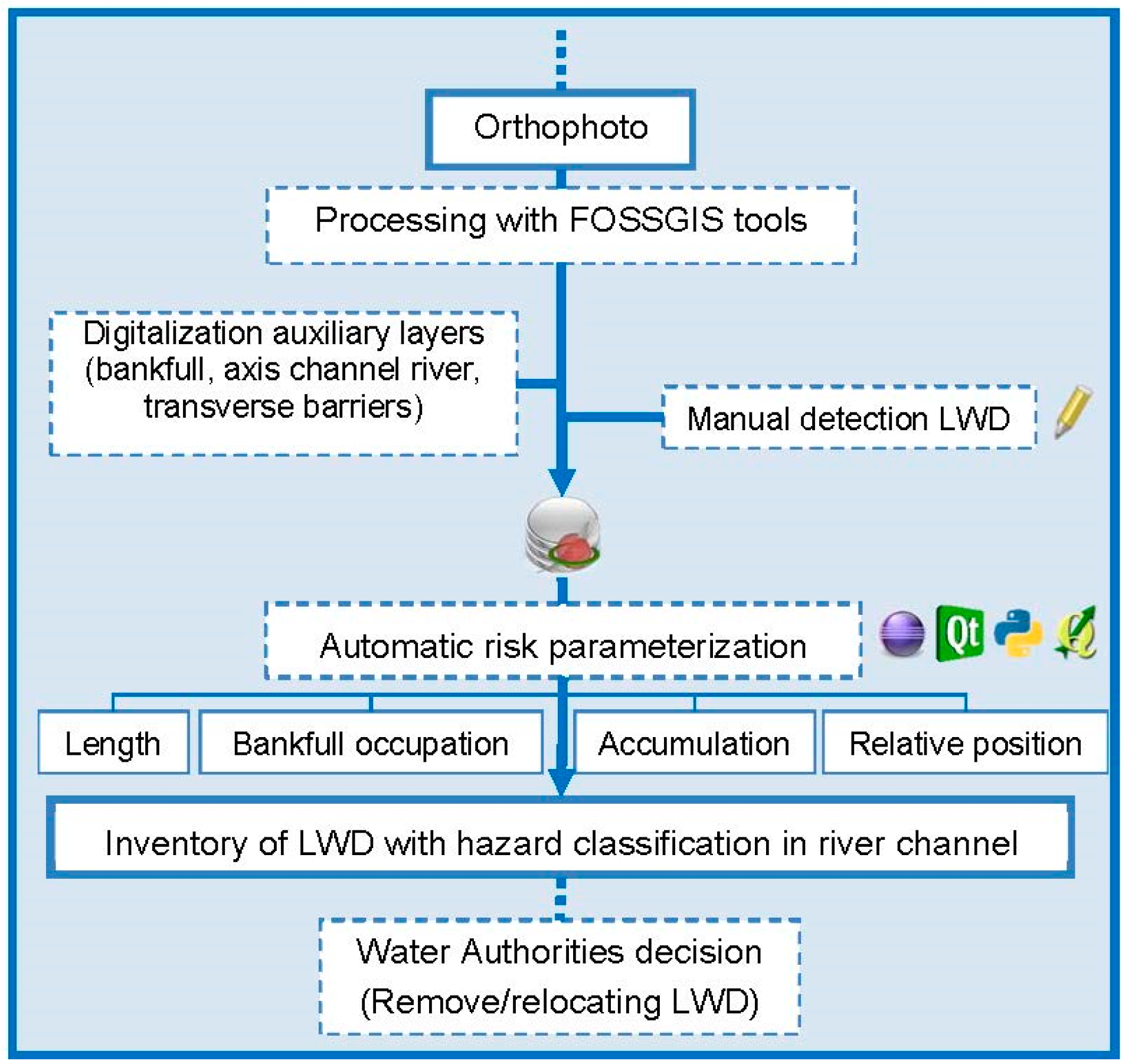
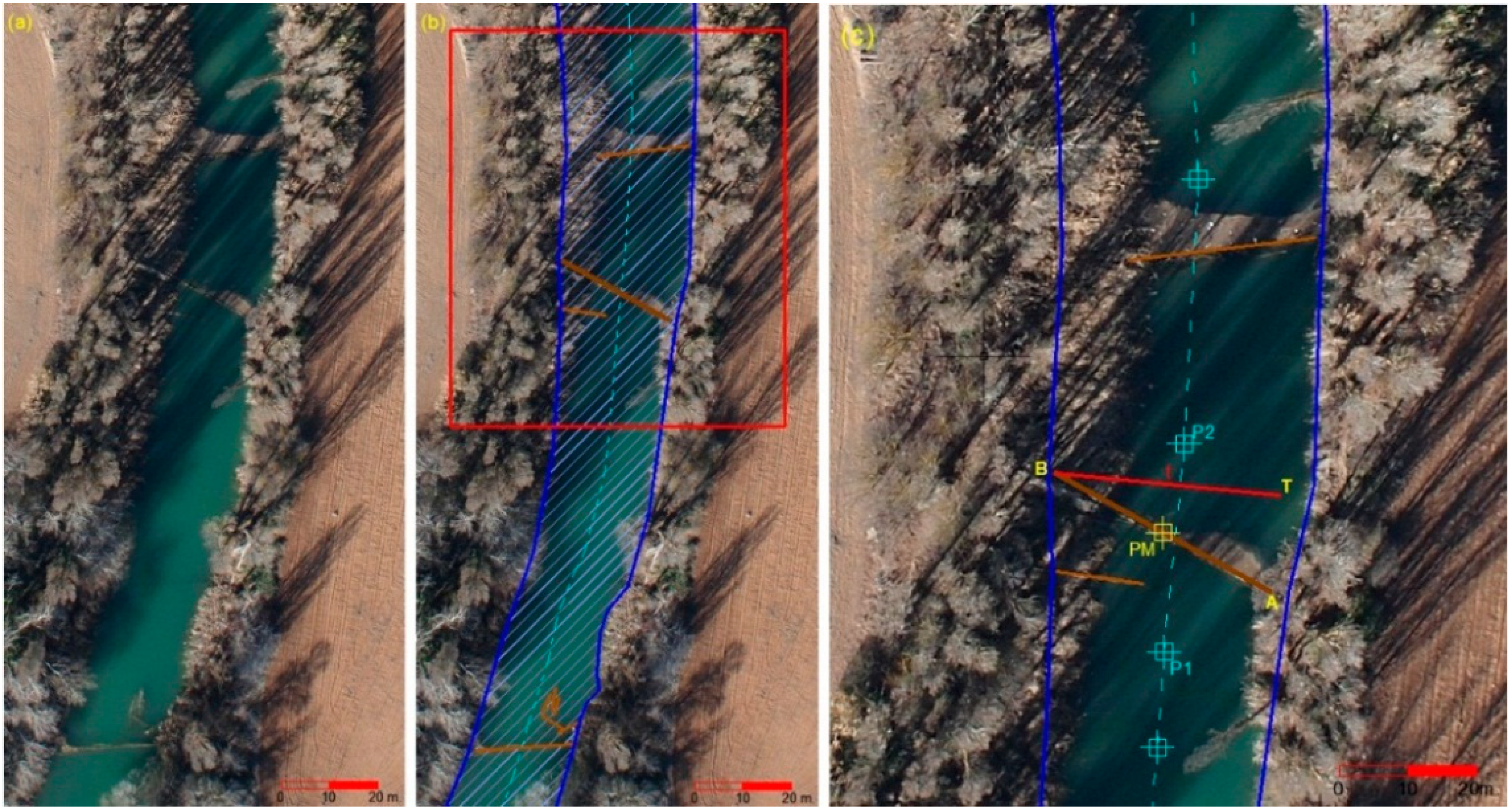
2.6. Automatic Classification of LWD Using FOSSGIS Tools


2.7. Economic Analysis of the Proposed Solution
- (1)
- The traditional method, consisting of removing riparian vegetation along the river to visually detect LWD. It is only applied in some problematic reaches of the river and consists of removing riparian vegetation every 50–60 m to detect LWD. Cost data from 2007 over a 4-km river segment were available.
- (2)
- Navigation by boat along the river and measuring LWD position using GPS; to evaluate the cost of this methodology, current tariffs were utilized. Based on previous experiences of JWA in similar tasks, a navigation rate of 1 km/h was considered, which therefore would require 132 h to navigate the segment analyzed. A 60 HP semi-rigid boat would be required.
- (3)
- Conventional photogrammetry, using conventional aircraft. The cost of performing this type of work was requested from different enterprises.
3. Results and Discussion
3.1. Adjustment of Flight Execution to the Flight Planning

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Mean | Max | Min |
|---|---|---|---|
| Flight altitude (m) | 375.5 | 384.1 | 365.3 |
| GSD (m) | 0.095 | 0.097 | 0.092 |
| Base line (m) | 55.3 | 62.6 | 47.4 |
| Deviation from verticality (DEG) | 4.6 | 8.1 | 0.5 |
| Length of each block (m) | 2050.86 | 2213.13 | 1869.58 |
| Quadratic mean error in planimetry (m) | 1.46 | 1.82 | 0.61 |
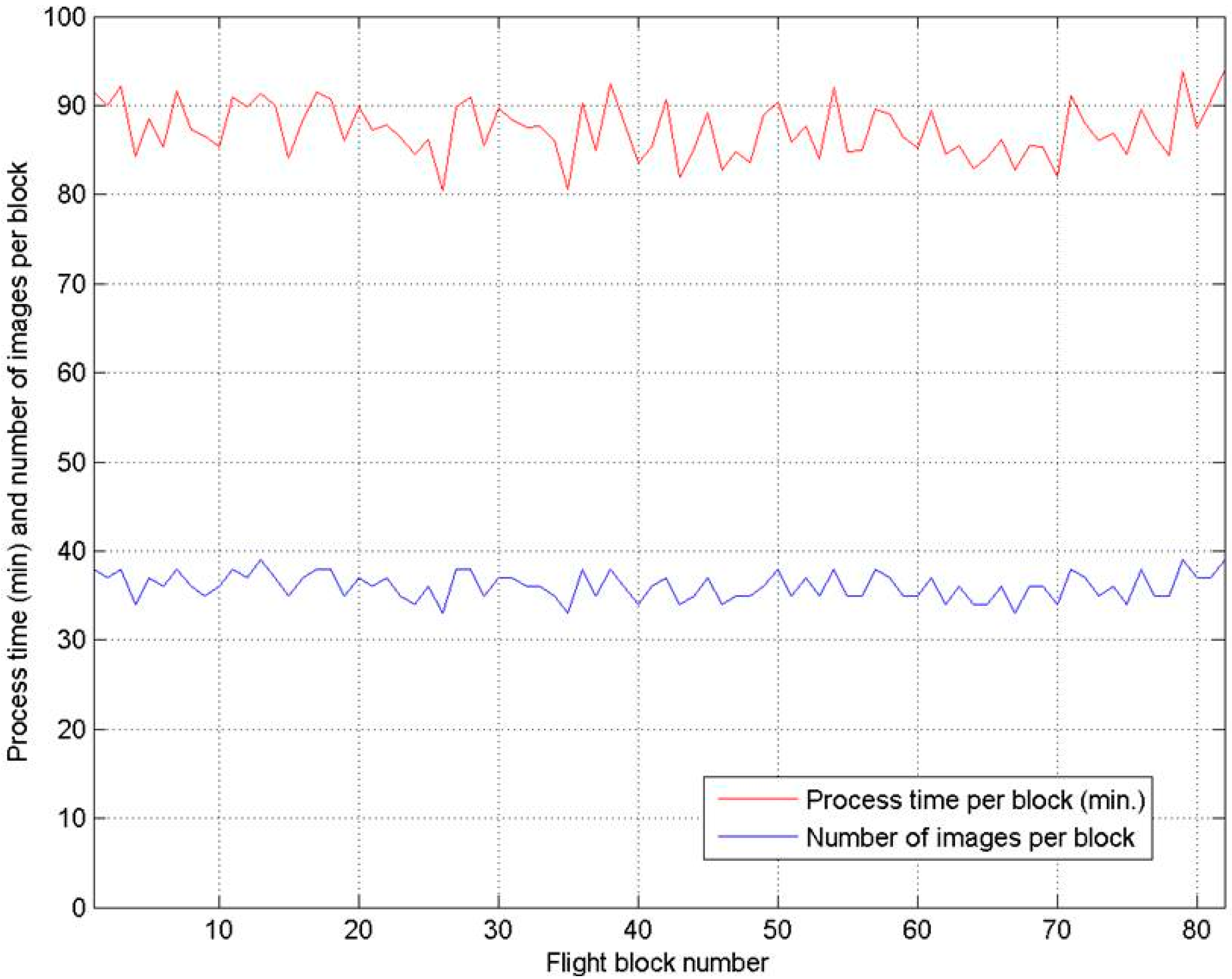
3.2. Processing Time

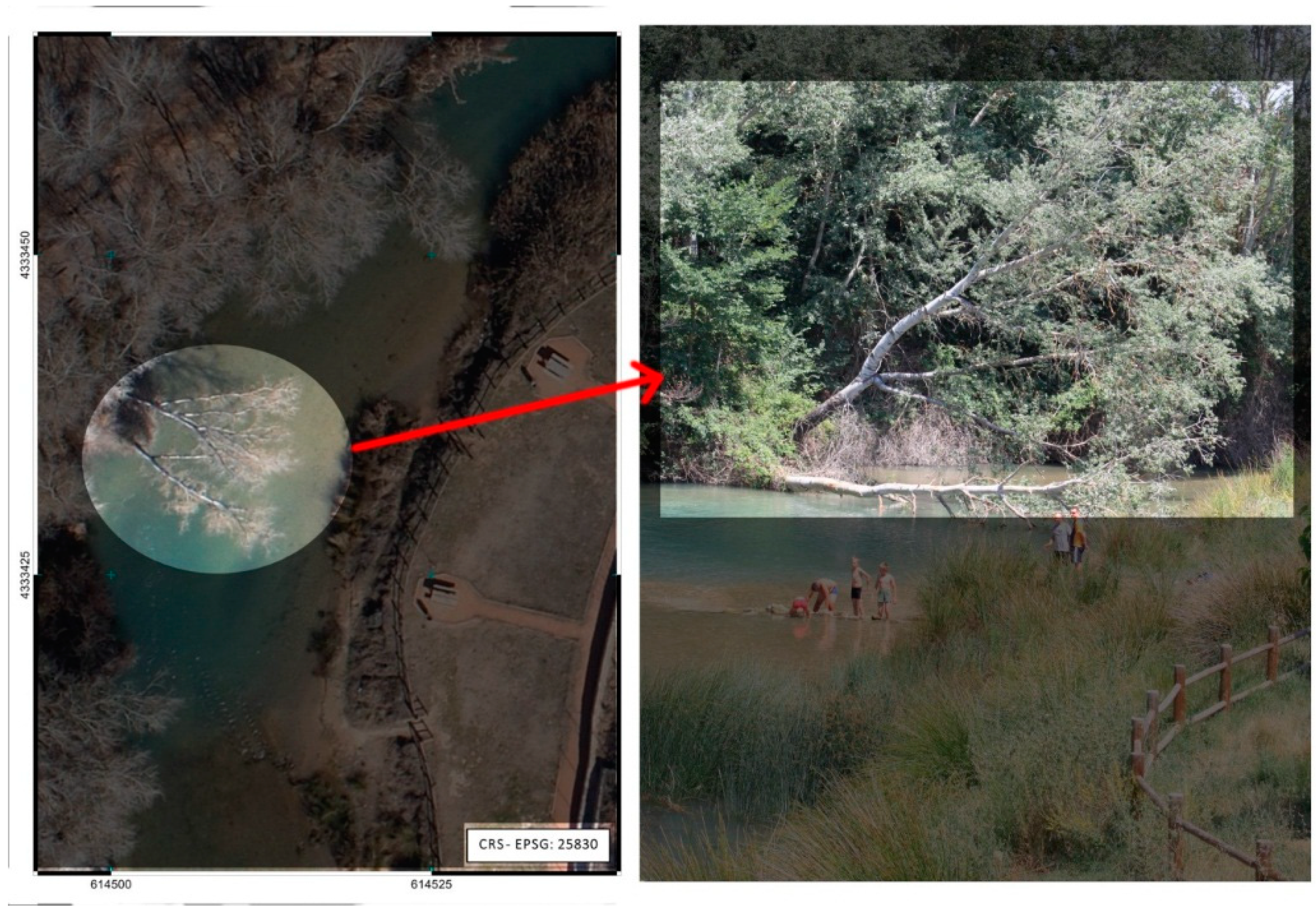
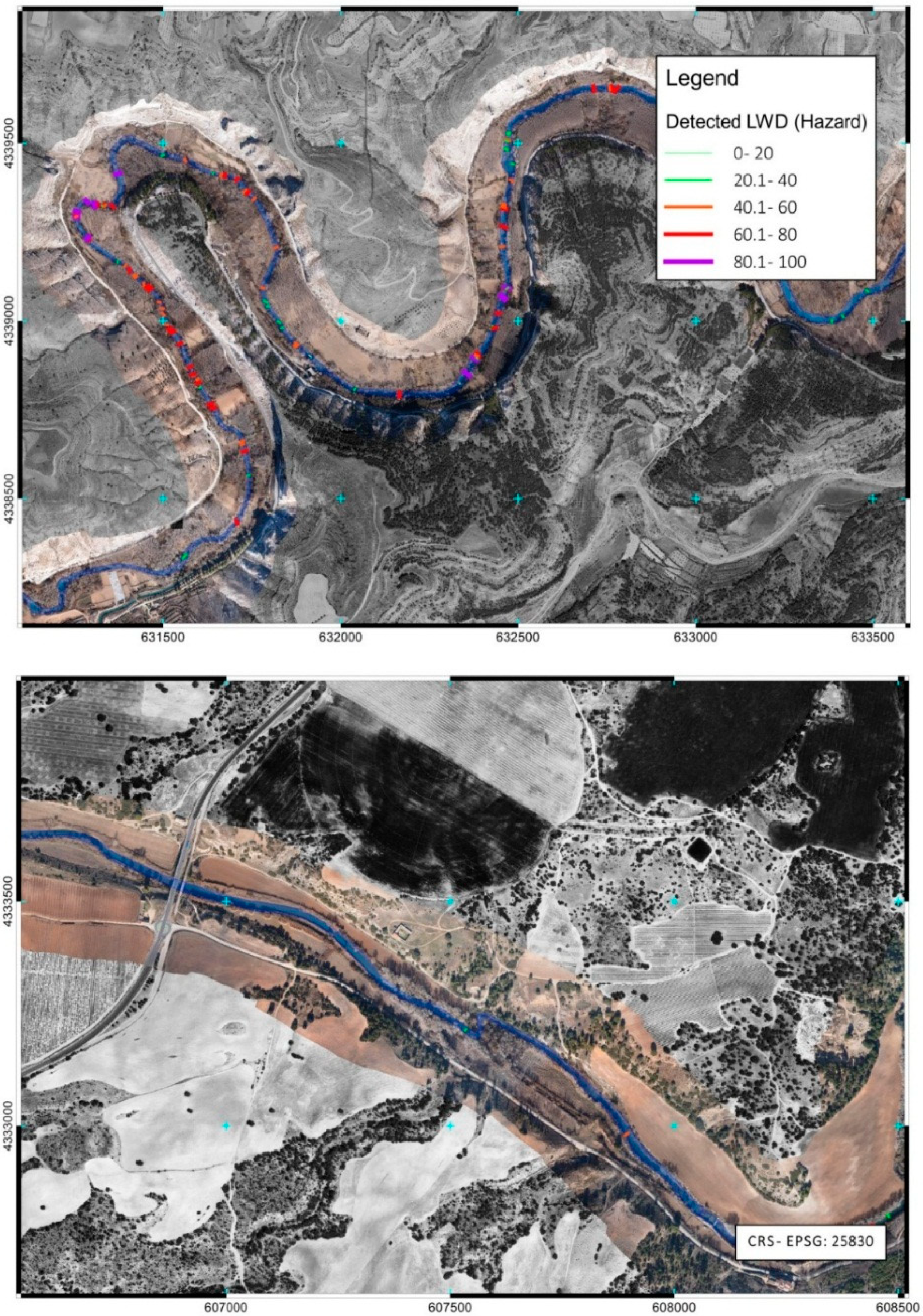
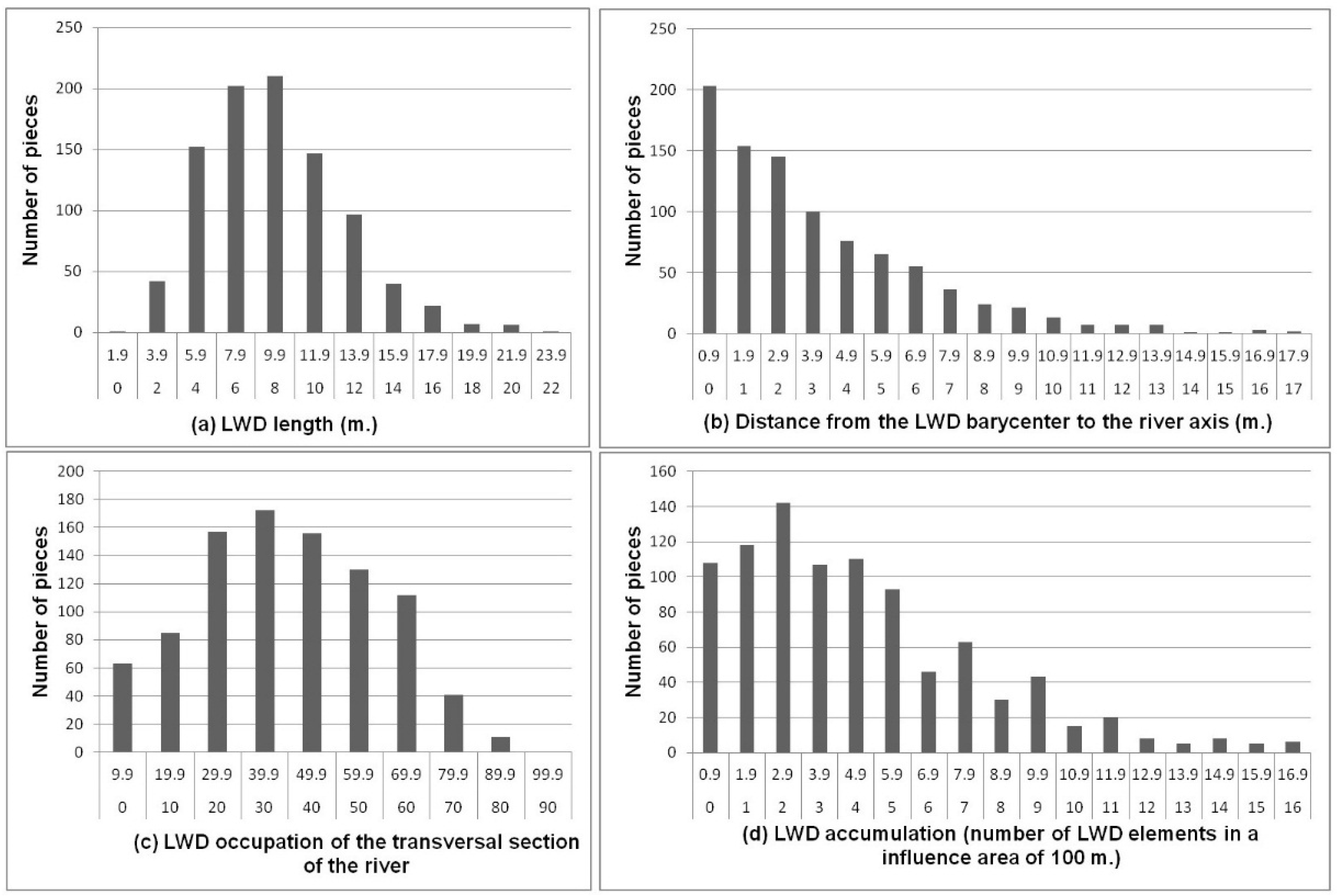
3.3. Results of the Detection and Classification of LWD




- (a)
- LWD elements identified by the proposed method, the existence of which was verified during the removal action.
- (p)
- New LWD detected during the removal action. This is caused by:
- (1)
- Trees occluded by others trees.
- (2)
- Areas where riparian vegetation covers the whole river (gallery forest).
- (3)
- Occlusions by constructions (bridges, gauging stations, etc.).
- (c)
- LWD elements identified by the proposed method, the existence of which was not possible to verify during the removal action. This is caused by the LWD that had been moved in the interval time between the flight and the action.
| Field Check | |||
|---|---|---|---|
| Verified | Non-Verified | ||
| Classified | 105 | 4 | |
| Non-Classified | Occlusions by trees | 4 | - |
| Gallery forest occlusion | 2 | - | |
| Occlusions by factory works | 1 | - | |

3.4. Economic Analysis
| Methodology | Sub-Tasks | Cost, € | Cost, € |
|---|---|---|---|
| Navigation method | GPS data acquisition | 5560 | 10,945 |
| Boat renting | 1330 | ||
| Boat operator | 3540 | ||
| SIG edition and final report | 515 | ||
| Conventional photogrammetry | GNSS stations measurements | 1350 | 9960 |
| Aircraft planning and flight | 6500 | ||
| Quick orthoimage generation | 700 | ||
| GIS digitization | 400 | ||
| Plugin development for hazard assessment | 1000 | ||
| Proposed methodology | Flight operator (>5 years’ experience) | 600 | 6000 |
| Minitrike renting | 1050 | ||
| Flight insurance and displacement | 150 | ||
| Measurement of the control points | 400 | ||
| Photogrammetric workflow | 2390 | ||
| GIS digitization | 400 | ||
| Plugin development for hazard assessment | 1000 |
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- QGIS. Available online: http://www.qgis.org (accessed on 1 October 2014).
- Jones, T.A.; Daniels, L.D.; Powell, S.R. Abundance and function of large woody debris in small, headwater streams in the Rocky Mountain foothills of Alberta, Canada. River Res. Appl. 2011, 27, 297–311. [Google Scholar] [CrossRef]
- Kail, J. Influence of large woody debris on the morphology of six central European streams. Geomorphology 2003, 51, 207–223. [Google Scholar] [CrossRef]
- Cordova, J.M.; Rosi-Marshall, E.J.; Yamamuro, A.M.; Lamberti, G.A. Quantity, controls and functions of large woody debris in Midwestern USA streams. River Res. Appl. 2007, 23, 21–33. [Google Scholar] [CrossRef]
- Máčka, Z.; Krejčí, L.; Loučková, B.; Peterková, L. A critical review of field techniques employed in the survey of large woody debris in river corridors: A central European perspective. Environ. Monit. Assess. 2011, 181, 291–316. [Google Scholar] [CrossRef] [PubMed]
- Gregory, K.J.; Davis, R.J. Coarse woody debris in stream channels in relation to river channel management in woodland areas. Regul. Rivers Res. Manag. 1992, 7, 117–136. [Google Scholar] [CrossRef]
- Gurnell, A.M.; Gregory, K.J.; Petts, G.E. The role of coarse woody debris in forest aquatic habitats: Implications for management. Aquat. Conserv. Mar. Freshw. Ecosyst. 1995, 5, 143–166. [Google Scholar] [CrossRef]
- Piégay, H.; Gurnell, A.M. Large woody debris and river geomorphological pattern: Examples from SE France and S. England. Geomorphology 1997, 19, 99–116. [Google Scholar] [CrossRef]
- Chin, A.; Laurencio, L.R.; Daniels, M.D.; Wohl, E.; Urban, M.A.; Boyer, K.L.; Butt, A.; Piegay, H.; Gregory, K.J. The significance of perceptions and feedbacks for effectively managing wood in rivers. River Res. Appl. 2014, 30, 98–111. [Google Scholar] [CrossRef]
- Trayler, K. WN9—Water Notes; Water and Rivers Commission: Perth, Western Australia, Australia, 2000. [Google Scholar]
- Anderson, B.G.; Rutherfurd, I.D.; Western, A.W. An analysis of the influence of riparian vegetation on the propagation of flood waves. Environ. Model. Softw. 2006, 21, 1290–1296. [Google Scholar] [CrossRef]
- Schuett-Hames, D.; Plues, A.E.; Ward, J.; Fox, M.; Light, J. TFW Monitoring Program Method Manual for the Large Woody Debris Survey; NW Indian Fisheries Commission, Timber, Fish & Wildlife: Olympia, WA, USA, 1999. [Google Scholar]
- Kise, M.; Zhang, Q. Creating a panoramic field image using multi-spectral stereovision system. Comput. Electron. Agric. 2008, 60, 67–75. [Google Scholar] [CrossRef]
- Herwitz, S.R.; Johnson, L.F.; Dunagan, S.E.; Higgins, R.G.; Sullivan, D.V.; Zheng, J.; Lobitz, B.M.; Leung, J.G.; Gallmeyer, B.A.; Aoyagi, M.; et al. Imaging from an unmanned aerial vehicle: Agricultural surveillance and decision support. Comput. Electron. Agric. 2004, 44, 49–61. [Google Scholar] [CrossRef]
- Dunford, R.; Michel, K.; Gagnage, M.; Piégay, H.; Trémelo, M.L. Potential and constraints of Unmanned Aerial Vehicle technology for the characterization of Mediterranean riparian forest. Int. J. Remote Sens. 2009, 30, 4915–4935. [Google Scholar] [CrossRef]
- Watts, A.; Perry, J.H.; Smith, S.E.; Burgess, M.A.; Wilkinson, B.E.; Szantoi, Z.; Ifju, P.G.; Percival, H.F. Small unmanned aircraft systems for low-altitude aerial surveys. J. Wildl. Manag. 2010, 74, 1614–1619. [Google Scholar] [CrossRef]
- Marcus, W.A.; Legleiter, C.J.; Aspinall, R.J.; Boardman, J.W.; Crabtree, R.L. High spatial resolution hyperspectral mapping of in-stream habitats, depths, and woody debris in mountain streams. Geomorphology 2003, 55, 363–380. [Google Scholar] [CrossRef]
- Lejot, J.; Delacourt, C.; Piégay, H.; Fournier, T.; Trémélo, M.L.; Allemand, P. Very high spatial resolution imagery for channel bathymetry and topography from an unmanned mapping controlled platform. Earth Surf. Process. Landf. 2007, 32, 1705–1725. [Google Scholar] [CrossRef]
- Aber, J.S.; Marzolff, I.; Ries, J. Small-Format Aerial Photography: Principles, Techniques and Applications; Elsevier: Amsterdam, The Netherlands, 2010. [Google Scholar]
- Olsen, R.C. Remote Sensing from Air and Space; SPIE Press: Bellingham, WA, USA, 2007; Volume 162. [Google Scholar]
- Szantoi, Z.; Malone, S.; Escobedo, F.; Misas, O.; Smith, S.; Dewitt, B. A tool for rapid post-hurricane urban tree debris estimates using high resolution aerial imagery. Int. J. Appl. Earth Observ. Geoinf. 2012, 18, 548–556. [Google Scholar] [CrossRef]
- Del Pozo, S.; Rodríguez-Gonzálvez, P.; Hernández-López, D.; Felipe-García, B. Vicarious radiometric calibration of a multispectral camera on board an unmanned aerial system. Remote Sens. 2014, 6, 1918–1937. [Google Scholar] [CrossRef]
- GeoEye. Available online: http://www.digitalglobe.com/sites/default/files/DG_GeoEye1_Update2014_DS.pdf (accessed on 14 July 2014).
- Kraus, K. Photogrammetry: Geometry from Images and Laser Scans; Walter De Gruyter: Berlin, Germany, 2007. [Google Scholar]
- Kemper, G. New airborne sensors and platforms for solving specific tasks in remote sensing. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXIX-B5, 351–356. [Google Scholar]
- Li, C.; Li, H.; Kemper, G. Monitoring urban development of small Chinese cities using innovative aerial surveying technologies. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, XXXVII, 1667–1674. [Google Scholar]
- Küng, O.; Strecha, C.; Beyeler, A.; Zufferey, J.C.; Floreano, D.; Fua, P.; Gervaix, F. The accuracy of automatic photogrammetric techniques on ultra-light UAV imagery. In Proceedings of the International Conference on Unmanned Aerial Vehicle in Geomatics (UAV-g), Zurich, Switzerland, 14–16 September 2011; pp. 14–16.
- Vallet, J.; Panissod, F.; Strecha, C.; Tracol, M. Photogrammetric performance of an ultra light weight swinglet “UAV”. In Proceedings of the International Conference on Unmanned Aerial Vehicle in Geomatics (UAV-g), Zurich, Switzerland, 14–16 September 2011; pp. 253–258.
- Smith, S.; Szantoi, Z.; Perry, J.; Percival, F.; Evers, B. Design considerations for remote sensing payloads on inexpensive unmanned autonomous aerial vehicles. Surv. Land Inf. Sci. 2010, 70, 131–137. [Google Scholar]
- CNIG. Available online: http://centrodedescargas.cnig.es/CentroDescargas (accessed on 14 July 2014).
- DIY Drones. Available online: http://diydrones.com/profiles/blogs/arduimu-quadcopter-part-ii (accessed on 14 July 2014).
- Premerlani, W.; Bizard, P. Direction Cosine Matrix IMU: Theory. Available online: http://gentlenav.googlecode.com/files/DCMDraft2.pdf (accessed on 14 July 2014).
- NavCen. Global Positioning System Standard Positioning Service Performance Standard, 4th ed.; US Department of Defense: Position, Navigation, and Timing Executive Committee: Washington, DC, USA, 2008. [Google Scholar]
- Takasu, T. RTKLIB: Open source program package for RTK-GPS. In Proceedings of the FOSS4G 2009, Tokyo, Japan, 1–2 November 2009.
- Sauerbier, M.; Siegrist, E.; Eisenbeiss, H.; Demir, N. The practical application of UAV-based photogrammetry under economic aspects. In Proceedings of the International Conference on Unmanned Aerial Vehicle in Geomatics (UAV-g), Zurich, Switzerland, 14–16 September 2011; pp. 45–50.
- El-Rabbany, A. Introduction to GPS: The Global Positioning System; Artech House: Boston, MA, USA, 2002. [Google Scholar]
- Pierrot-Deseilligny, M.; Clery, I. Apero, an open source bundle adjusment software for automatic calibration and orientation of set of images. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, XXXVIII-5/W16, 269–276. [Google Scholar]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Hirschmuller, H. Stereo processing by semiglobal matching and mutual information. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 328–341. [Google Scholar] [CrossRef] [PubMed]
- Chen, D.; Shams, S.; Carmona-Moreno, C.; Leone, A. Assessment of open source GIS software for water resources management in developing countries. J. Hydro-Environ. Res. 2010, 4, 253–264. [Google Scholar] [CrossRef]
- Teodoro, A.C.; Duarte, L. Forest fire risk maps: A GIS open source application—A case study in Norwest of Portugal. Int. J. Geogr. Inf. Sci. 2012, 27, 699–720. [Google Scholar] [CrossRef]
- Gaia-SINS. Available online: http://www.gaia-gis.it/gaia-sins/ (accessed on 14 July 2014).
- Wohl, E.; Cenderelli, D.A.; Dwire, K.A.; Ryan-Burkett, S.E.; Young, M.K.; Fausch, K.D. Large in-stream wood studies: A call for common metrics. Earth Surf. Process. Landf. 2010, 35, 618–625. [Google Scholar]
- Gichamo, T.Z.; Popescu, I.; Jonoski, A.; Solomatine, D. River cross-section extraction from the ASTER global DEM for flood modeling. Environ. Model. Softw. 2012, 31, 37–46. [Google Scholar] [CrossRef]
- Lacroix, M.P.; Martz, L.W.; Kite, G.W.; Garbrecht, J. Using digital terrain analysis modeling techniques for the parameterization of a hydrologic model. Environ. Model. Softw. 2002, 17, 125–134. [Google Scholar] [CrossRef]
- Lautenbach, S.; Jürgen, B.; Graf, N.; Seppelt, R.; Matthies, M. Scenario analysis and management options for sustainable river basin management: Application of the Elbe DSS. Environ. Model. Softw. 2009, 24, 26–43. [Google Scholar] [CrossRef]
- MacVicar, B.J.; Piégay, H.; Henderson, A.; Comiti, F.; Oberlin, C.; Pecorari, E. Quantifying the temporal dynamics of wood in large rivers: Field trials of wood surveying, dating, tracking, and monitoring techniques. Earth Surf. Process. Landf. 2009, 34, 2031–2046. [Google Scholar] [CrossRef]
- Dufour, S.; Bernez, I.; Betbeder, J.; Corgne, S.; Hubert-Moy, L.; Nabucet, J.; Rapinel, S.; Sawtschuk, J.; Trollé, C. Monitoring restored riparian vegetation: How can recent developments in remote sensing sciences help? Knowl. Manag. Aquat. Ecosyst. 2013. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ortega-Terol, D.; Moreno, M.A.; Hernández-López, D.; Rodríguez-Gonzálvez, P. Survey and Classification of Large Woody Debris (LWD) in Streams Using Generated Low-Cost Geomatic Products. Remote Sens. 2014, 6, 11770-11790. https://doi.org/10.3390/rs61211770
Ortega-Terol D, Moreno MA, Hernández-López D, Rodríguez-Gonzálvez P. Survey and Classification of Large Woody Debris (LWD) in Streams Using Generated Low-Cost Geomatic Products. Remote Sensing. 2014; 6(12):11770-11790. https://doi.org/10.3390/rs61211770
Chicago/Turabian StyleOrtega-Terol, Damian, Miguel A. Moreno, David Hernández-López, and Pablo Rodríguez-Gonzálvez. 2014. "Survey and Classification of Large Woody Debris (LWD) in Streams Using Generated Low-Cost Geomatic Products" Remote Sensing 6, no. 12: 11770-11790. https://doi.org/10.3390/rs61211770
APA StyleOrtega-Terol, D., Moreno, M. A., Hernández-López, D., & Rodríguez-Gonzálvez, P. (2014). Survey and Classification of Large Woody Debris (LWD) in Streams Using Generated Low-Cost Geomatic Products. Remote Sensing, 6(12), 11770-11790. https://doi.org/10.3390/rs61211770