BAMS: A Tool for Supervised Burned Area Mapping Using Landsat Data

 and
and 
Abstract
:1. Introduction
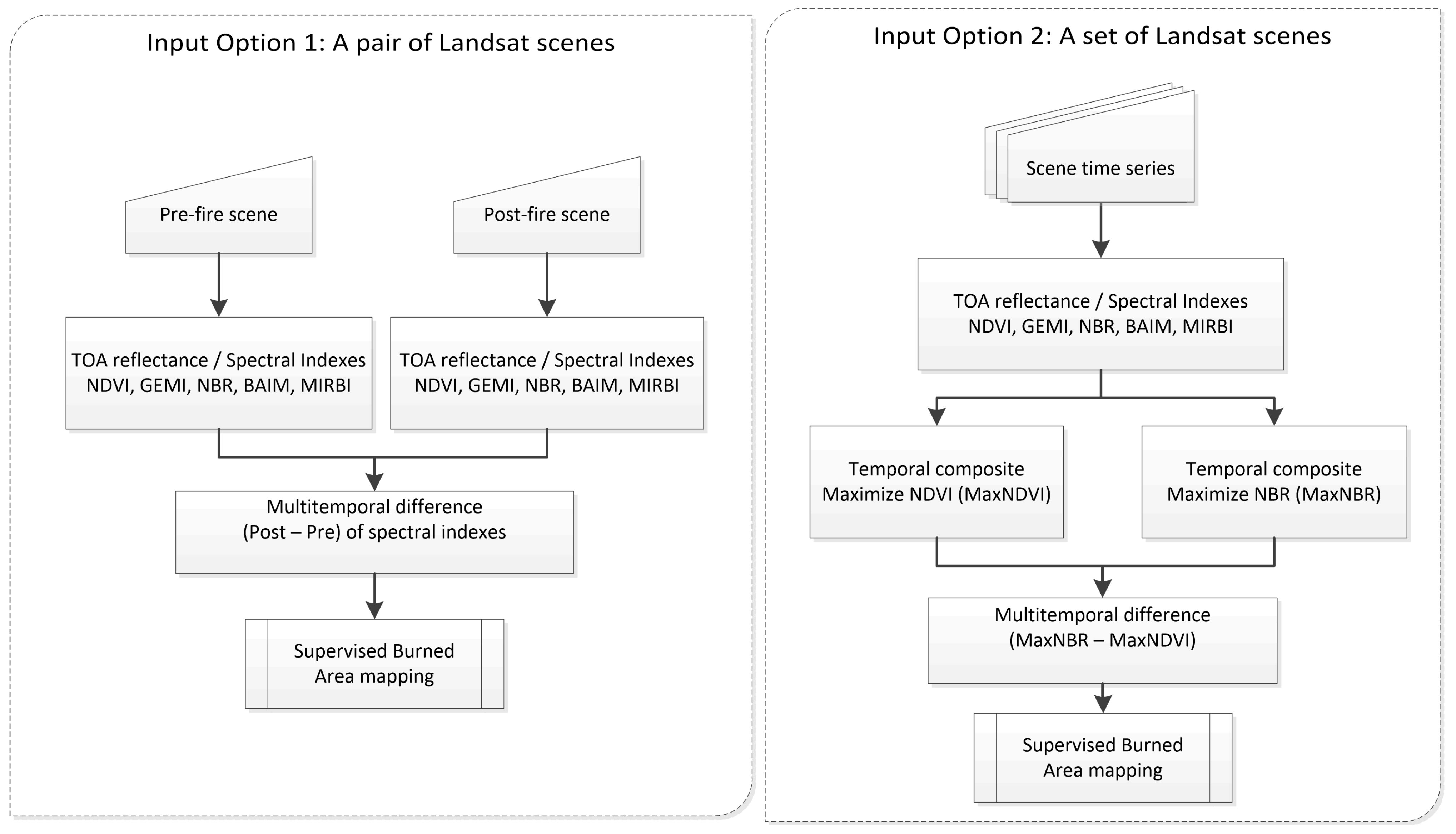
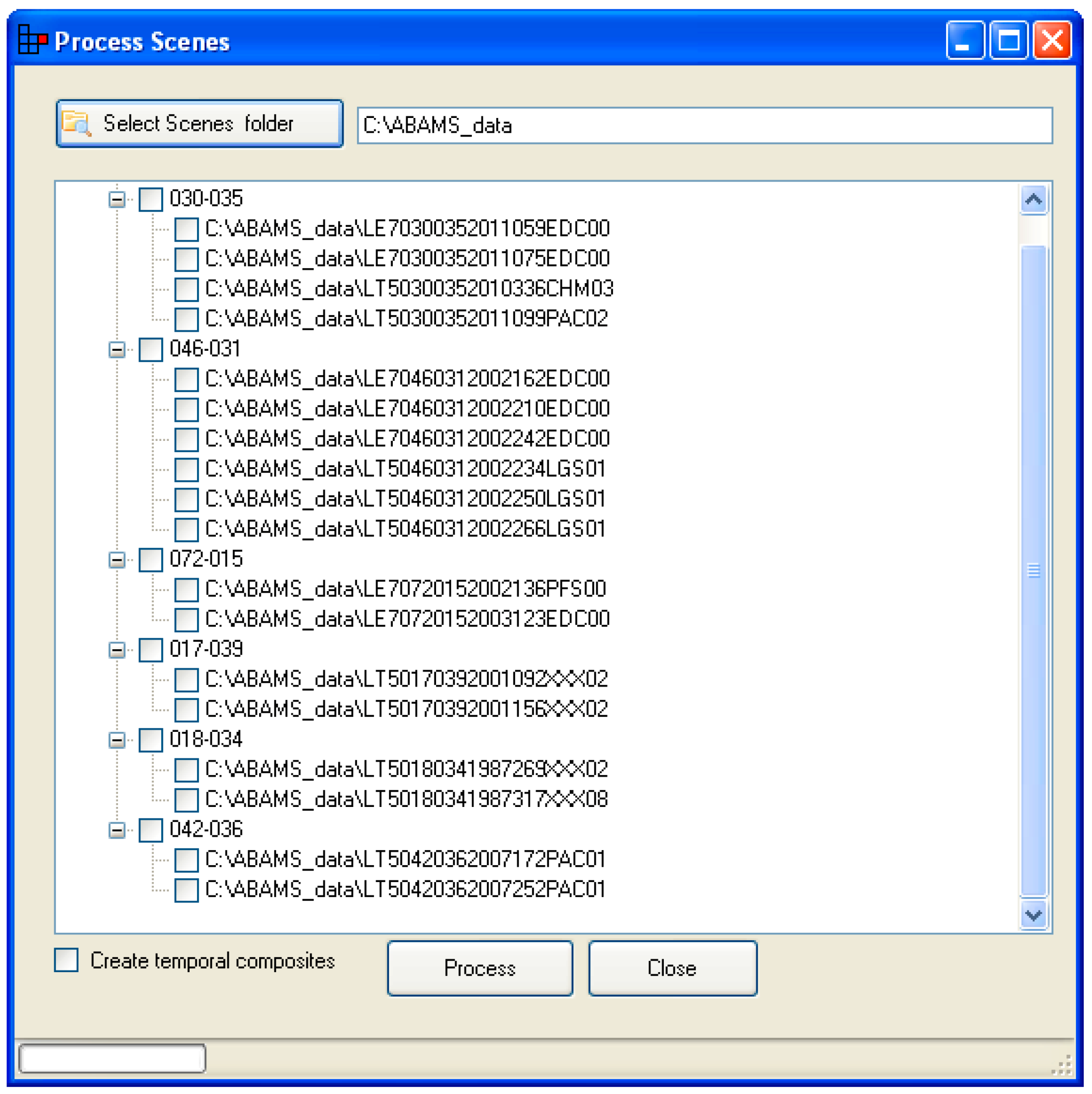
2. BAMS Program Flow


2.1. Generation of Reflectances
- ρλ = Exoatmospheric Top of Atmosphere reflectance (TOA)
- Lλ = Spectral radiance at the sensors aperture
- d = Earth-Sun distance
- ESUNλ = Mean exoatmospheric solar irradiance
- θs = Solar zenith angle
- Grescale = Band-specific rescaling gain factor from the metadata
- Qcal = Quantized calibrated pixel value (DN)
- Brescale = Band-specific rescaling bias factor from the metadata
- ρλ = TOA planetary reflectance, without correction for solar angle.
- Mρ = Band-specific multiplicative rescaling factor from the metadata
- Aρ = Band-specific additive rescaling factor from the metadata
- Qcal = Quantized and calibrated standard product pixel values (DN)
- θs = Solar zenith angle
2.2. Computation of Burned Area Spectral Indexes
- Normalized Difference Vegetation Index (NDVI) [34], NDVI = (ρNIR − ρRED)/(ρNIR + ρRED)
- Burned Area Index Modified (BAIM) [35], BAIM = 1/((ρNIR − 0.05)2 + (ρSWIRL − 0.2)2)
- Global Environmental Monitoring Index (GEMI) [36], GEMI = η (1 − 0.25 η) − (ρRED − 0.125)/(1 − ρRED)
- Normalized Burned Ratio (NBR) [37], NBR = (ρNIR − ρSWIRL)/(ρNIR + ρSWIRL) and
- Mid-Infrared Burned Index (MIRBI) [38], MIRBI = 10 ρSWIRL − 9.8 ρSWIRS
- η = (2 (ρNIR2 − ρRED2) + 1.5 ρNIR + 0.5 ρRED)/(ρNIR + ρRED + 0.5)
- ρRED = Red reflectance
- ρNIR = Near Read Infrared reflectance
- ρSWIRS = Short Wave Infrared Short reflectance (approximately wavelength center in 1.6 μm)
- ρSWIRL = Short Wave Infrared Long reflectance (approximately wavelength center in 2.2 μm)
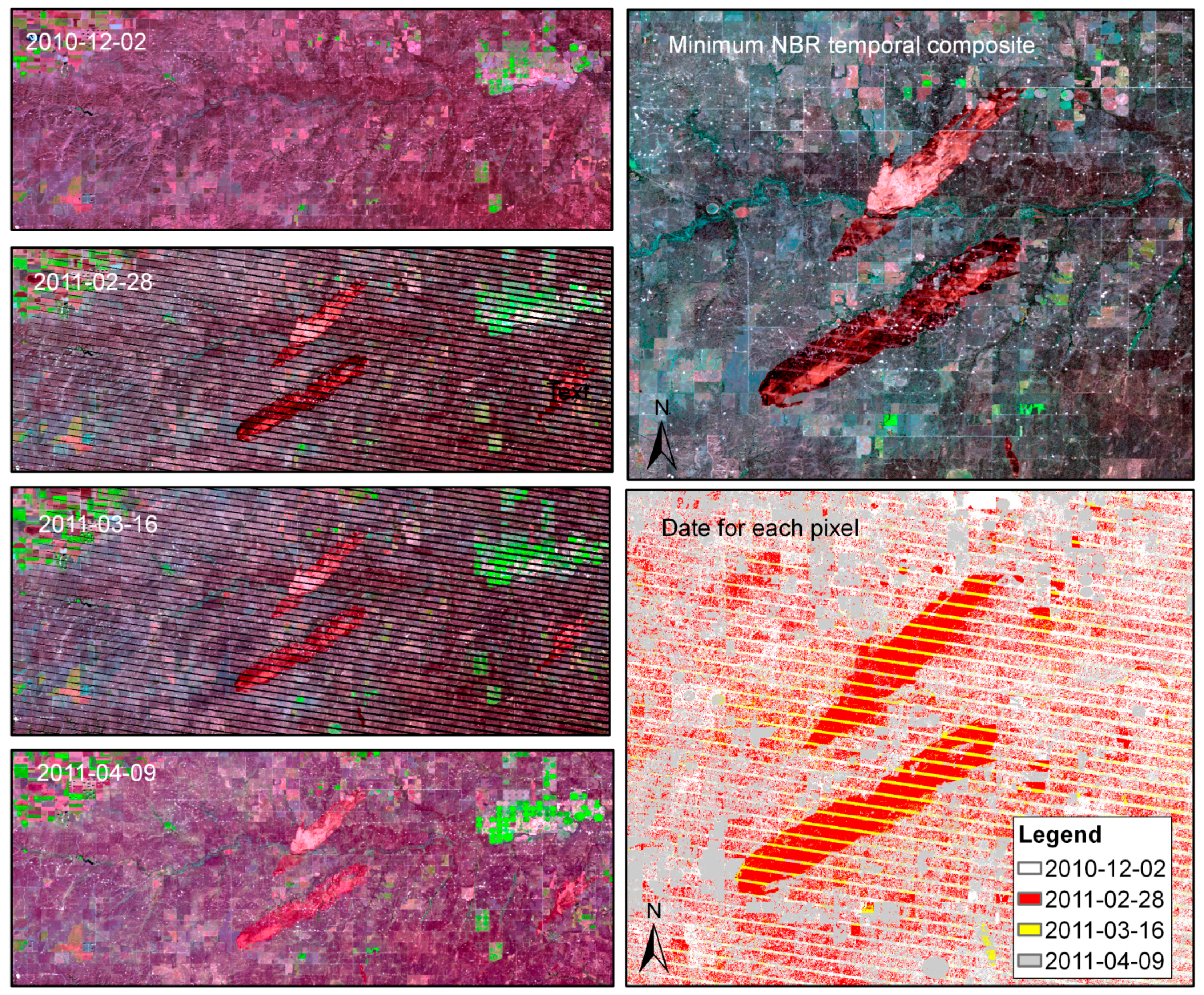
2.3. Temporal Composites
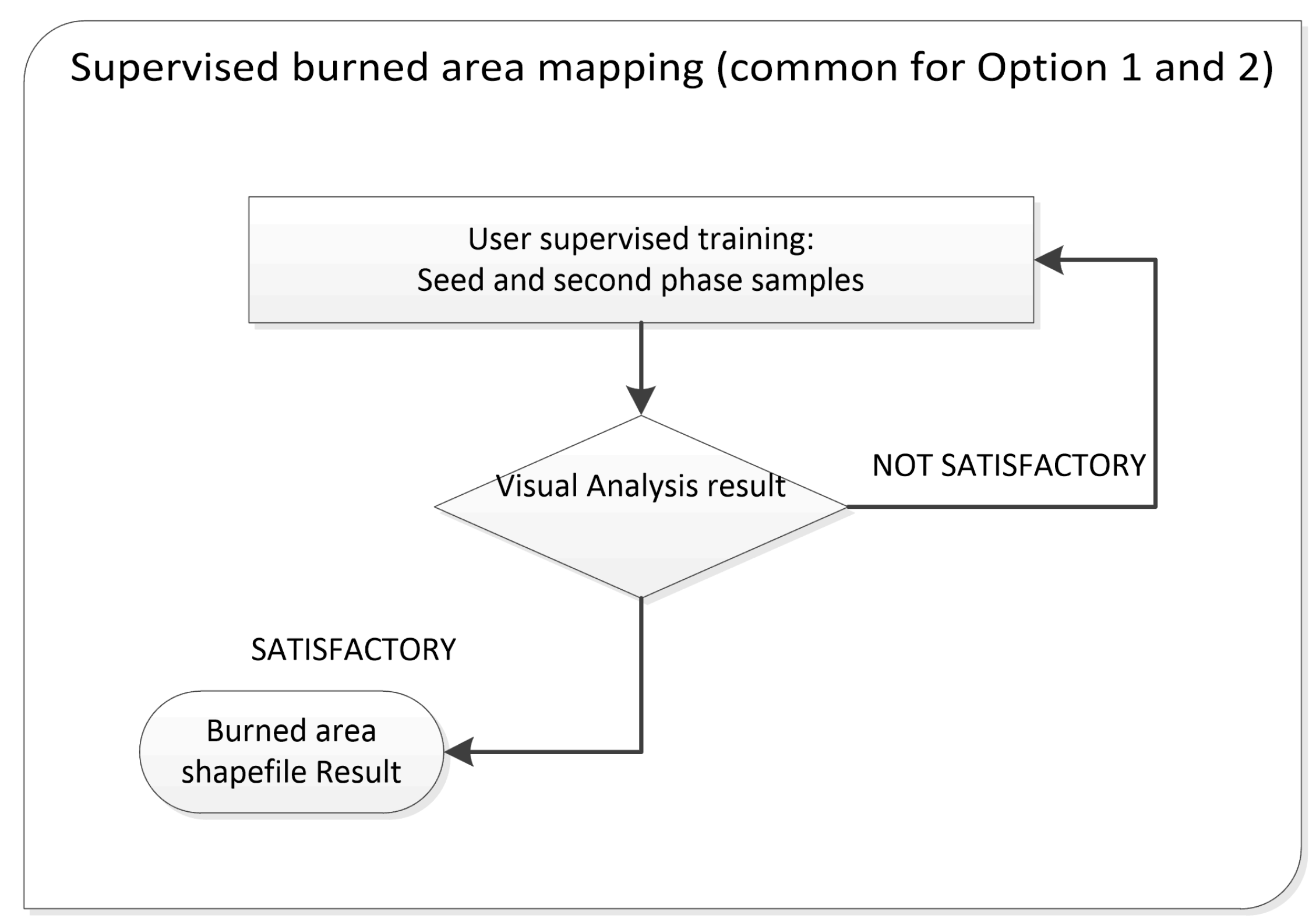
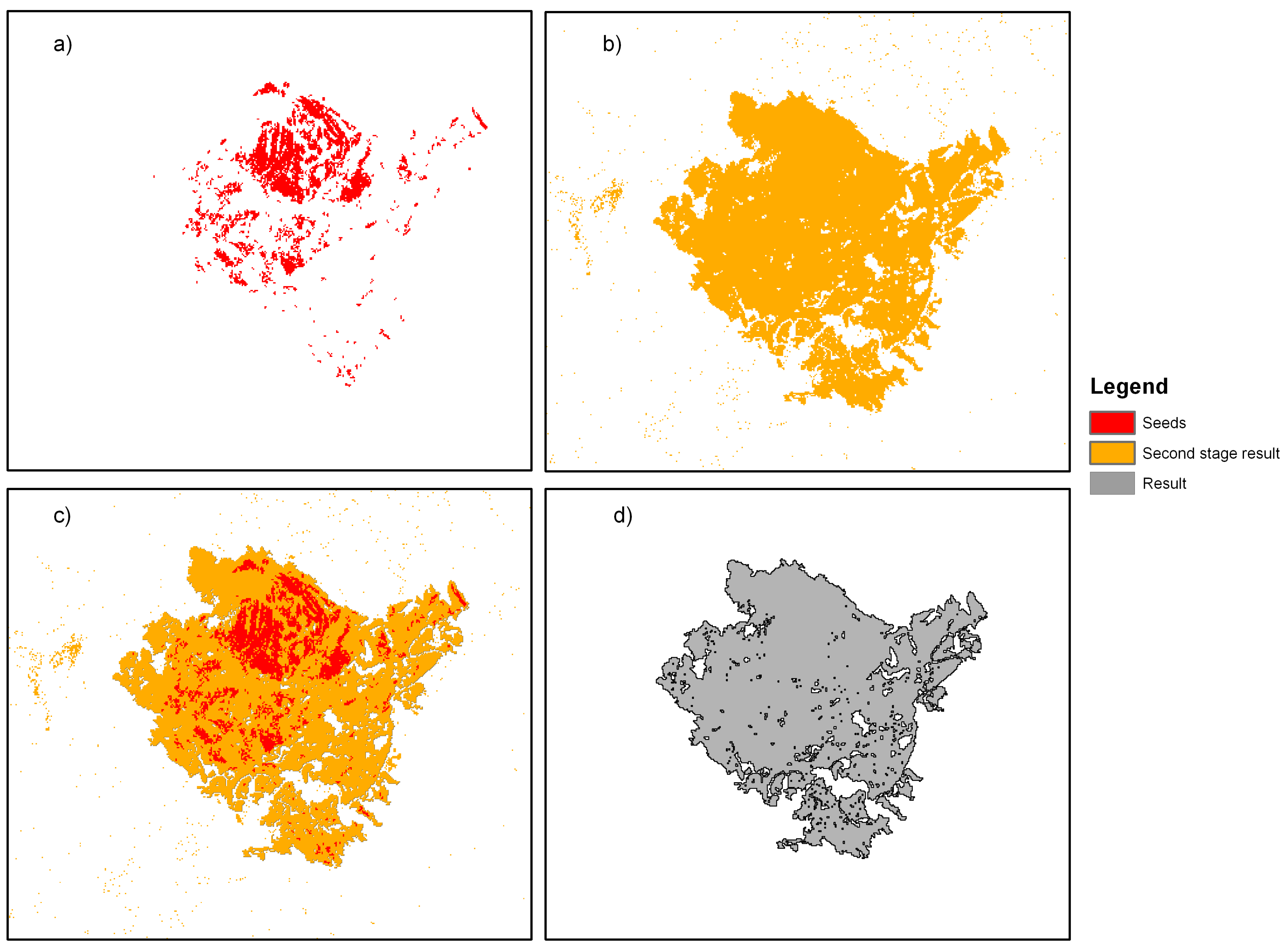
2.4. Burned Area Mapping Supervised Methodology

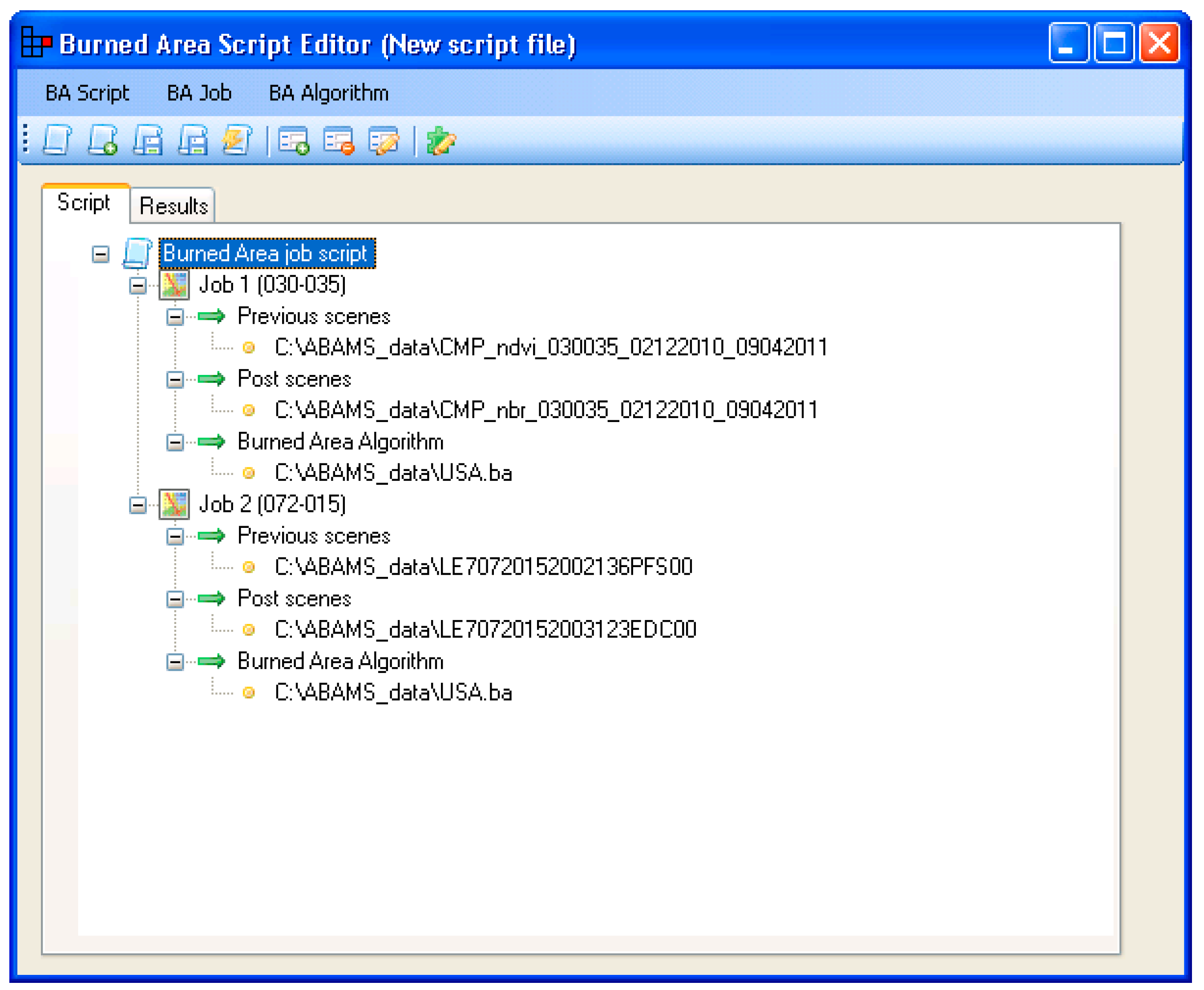
2.5. Batch Process
2.6. BAMS Result
3. Testing the BAMS Code
3.1. Methodology

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
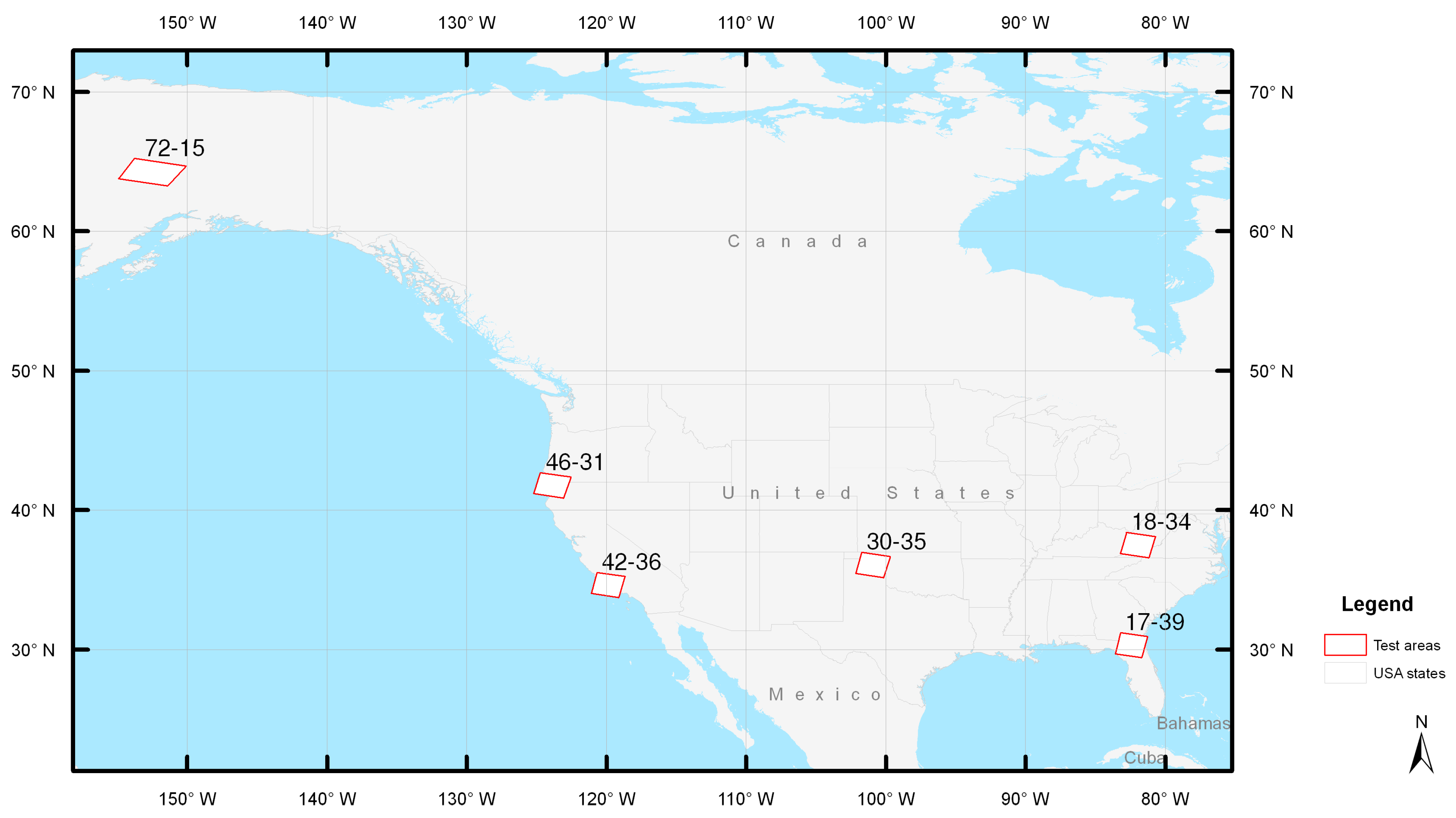
| Scene (Path-Row) | Pre-Scene Sensor/Date | Post Scenes Sensor/Date(s) | State | Ecoregion/Affected Land Cover | Area (ha) |
|---|---|---|---|---|---|
| 30-35 | LT5/2010-12-02 | LE7/2011-02-28 LE7/2011-03-16 LT5/2011-04-09 | Texas | Great Plains/Herbaceous-shrubland | 30147 |
| 17-39 | LT5/2001-04-02 | LT5/2001-06-05 | Florida/Georgia | Eastern Temperate Forest/Woody wetlands–Emergent herbaceous wetlands | 28232 |
| 18-34 | LT5/1987-09-26 | LT5/1987-11-13 | Kentucky/West Virginia | Eastern Temperate Forest/Deciduous forest | 232946 |
| 42-36 | LT5/2007-06-21 | LT5/2007-09-09 | California | Mediterranean California/Shrub–Scrub–Evergreen forest | 99373 |
| 46-31 | LE7/2002-06-11 | LE7/2002-08-30 | Oregon/California | Northwest Forested Mountains/Shrub–Scrub–Evergreen forest | 191809 |
| 72-15 | LE7/2002-05-16 | LE7/2003-05-03 | Alaska | Taiga/sub-polar grassland–shrubland | 249179 |

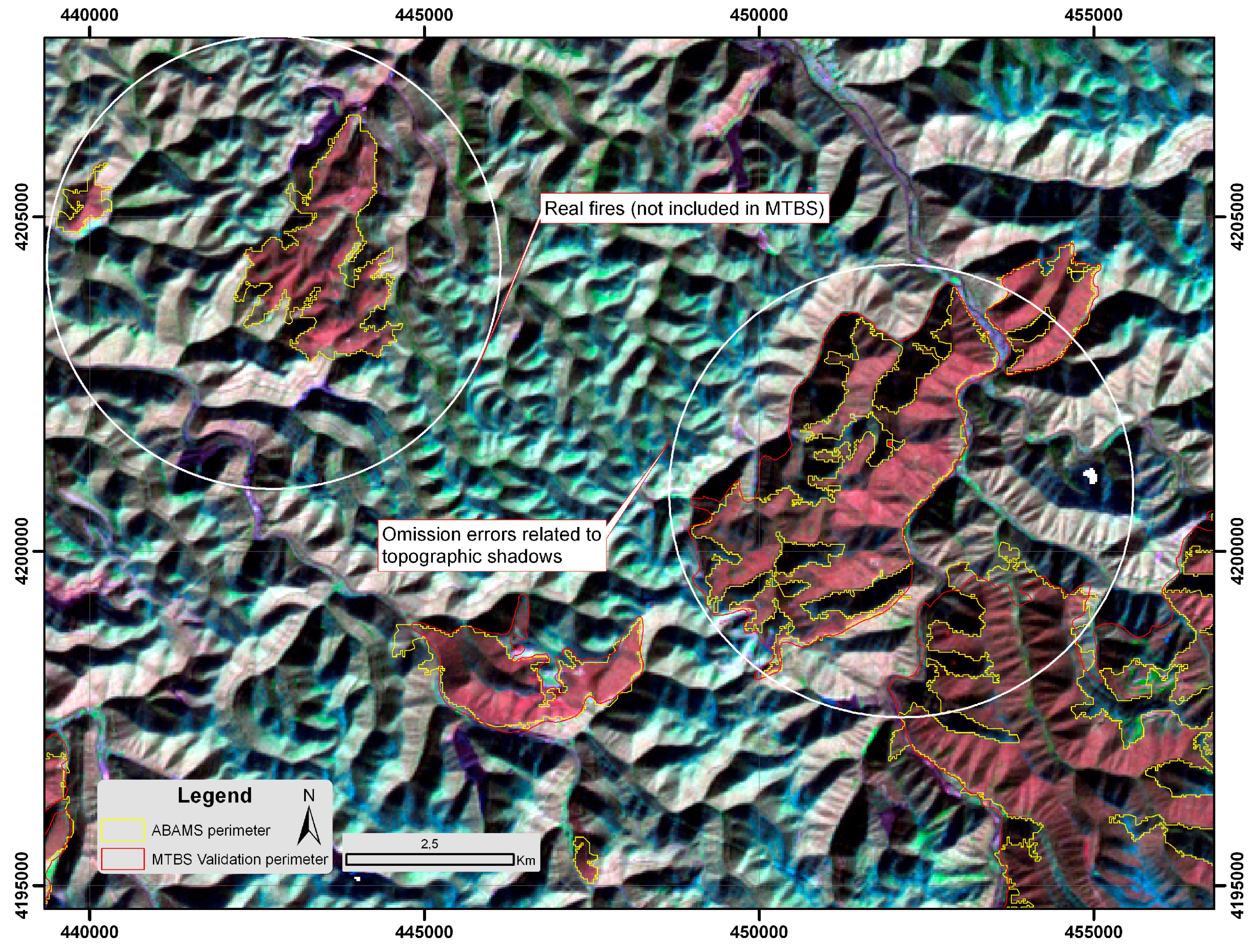
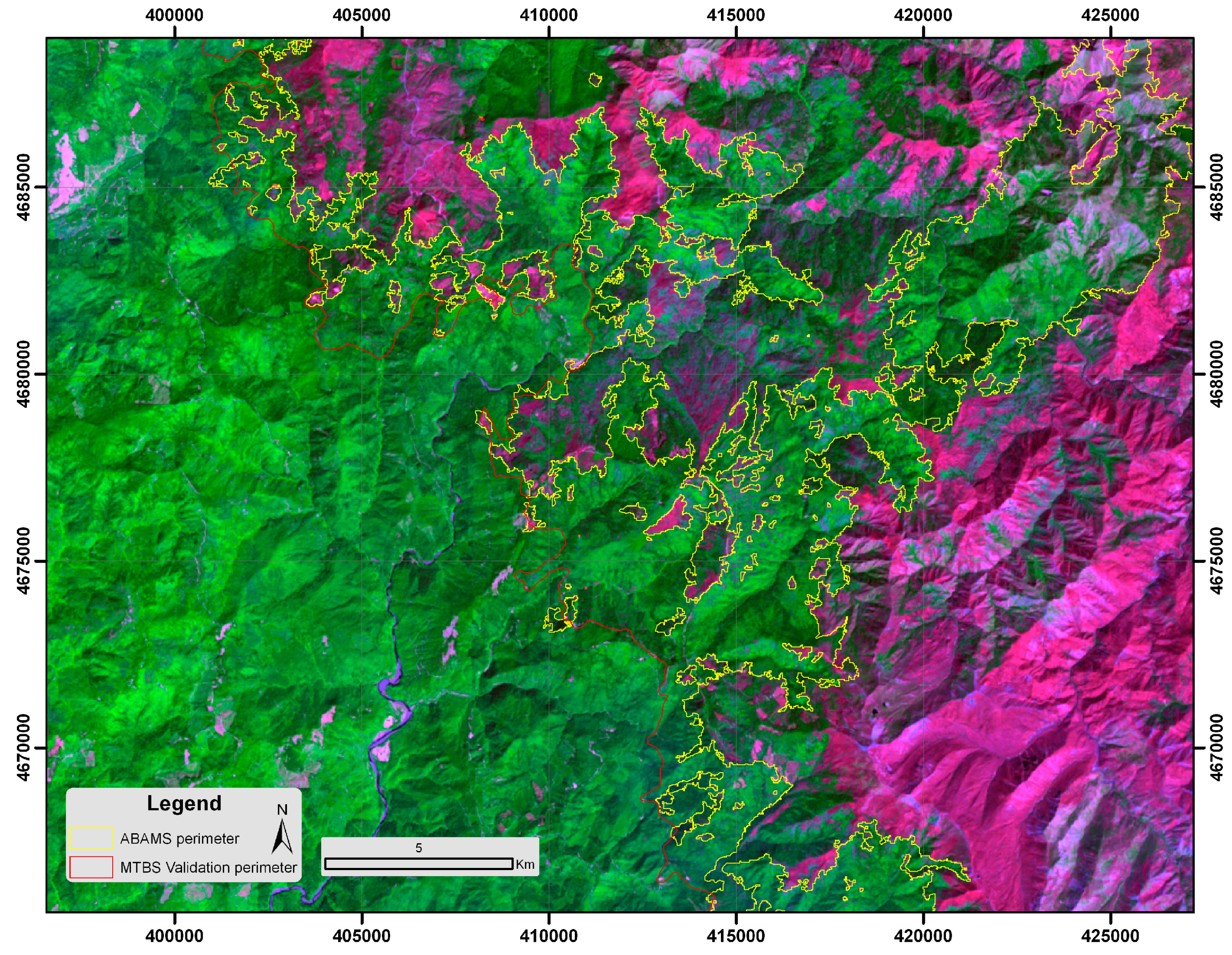
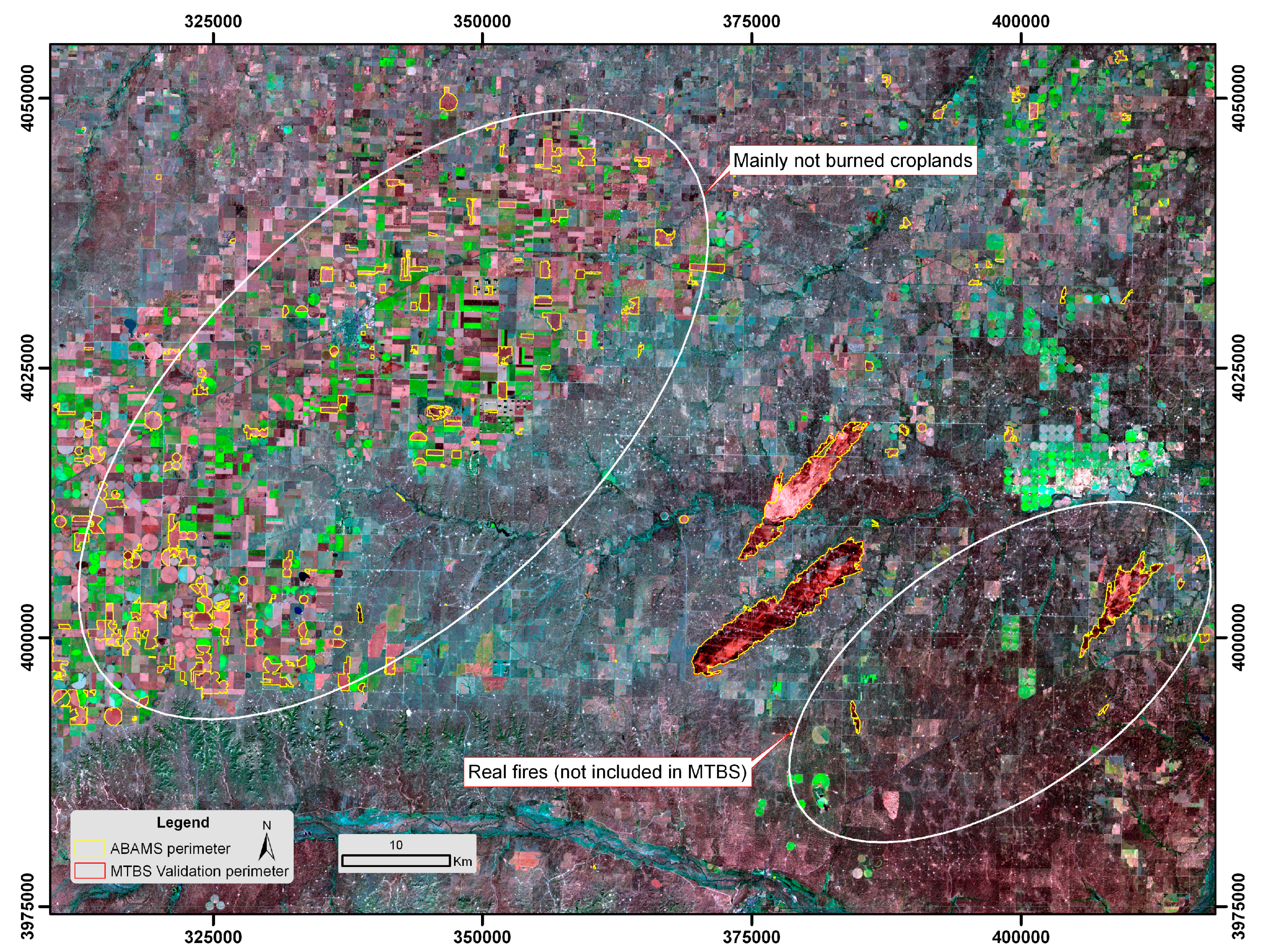
3.2. Results
| Scene (Path-Row) | Iterations | Underestimation (%) | Overestimation (%) | Kappa |
|---|---|---|---|---|
| 30-35 | 11 | 6.3 | 71.0 | 0.436 |
| 17-39 | 3 | 4.2 | 4.0 | 0.959 |
| 18-34 | 2 | 18.6 | 13.0 | 0.829 |
| 42-36 | 3 | 3.9 | 1.8 | 0.971 |
| 46-31 | 4 | 11.0 | 1.0 | 0.933 |
| 72-15 | 3 | 6.8 | 0.9 | 0.958 |



4. Discussion

5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Goldammer, J.G.; Statheropoulos, M.; Andreae, M.O.; Andrzej Bytnerowicz, M.J.A.A.R.R.; Andersen, C. Chapter 1. Impacts of vegetation fire emissions on the environment, human health, and security: A global perspective. In Developments in Environmental Science; Elsevier: Amsterdam, The Netherlands, 2008; Volume 8, pp. 3–36. [Google Scholar]
- Giglio, L.; Randerson, J.T.; van der Werf, G.R.; Kasibhatla, P.S.; Collatz, G.J.; Morton, D.C.; DeFries, R.S. Assessing variability and long-term trends in burned area by merging multiple satellite fire products. Biogeosciences 2010, 7, 1171–1186. [Google Scholar] [CrossRef]
- Chang, D.; Song, Y. Comparison of L3JRC and MODIS global burned area products from 2000 to 2007. J. Geophys. Res.: Atmos. 2009, 114, D16106. [Google Scholar] [CrossRef]
- Roy, D.P.; Jin, Y.; Lewis, P.E.; Justice, C.O. Prototyping a global algorithm for systematic fire-affected area mapping using MODIS time series data. Remote Sens. Environ. 2005, 97, 137–162. [Google Scholar] [CrossRef]
- Tansey, K.; Grégoire, J.M.; Defourny, P.; Leigh, R.; Peckel, J.F.; Bogaert, E.V.; Bartholome, J.E. A new, global, multi-annual (2000–2007) burnt area product at 1 km resolution. Geophys. Res. Lett. 2008. [Google Scholar] [CrossRef]
- Plummer, S.; Ranera, F.; Arino, O. The GLOBCARBON initiative: Populating the Earth with burned areas. Geophys. Res. Abstr. 2005, 7, 08581. [Google Scholar]
- Giglio, L.; Loboda, T.; Roy, D.P.; Quayle, B.; Justice, C.O. An active-fire based burned area mapping algorithm for the MODIS sensor. Remote Sens. Environ. 2009, 113, 408–420. [Google Scholar] [CrossRef]
- Tansey, K.; Gregoire, J.-M.; Stroppiana, D.; Sousa, A.; Silva, J.; Pereira, J.M.C.; Boschetti, L.; Maggi, M.; Brivio, P.A.; Fraser, R.; et al. Vegetation burning in the year 2000: Global burned area estimates from SPOT VEGETATION data. J. Geophys. Res. Atmos. 2004, 109, D14S03. [Google Scholar] [CrossRef]
- Boschetti, L.; Eva, H.; Brivio, P.A.; Gallego, J. The validation protocol of GBA2000 global burned area maps. IEEE Trans. Geosci. Remote Sens. 2004, 3, 2107–2110. [Google Scholar]
- Roy, D.P.; Boschetti, L. Southern Africa validation of the MODIS, L3JRC, and GlobCarbon burned-area products. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1032–1044. [Google Scholar] [CrossRef]
- Padilla, M.; Stehman, S.V.; Chuvieco, E. Validation of the 2008 MODIS-MCD45 global burned area product using stratified random sampling. Remote Sens. Environ. 2014, 144, 187–196. [Google Scholar] [CrossRef]
- Anaya, J.A.; Chuvieco, E. Accuracy assessment of burned area products in the Orinoco basin. Photogramm. Eng. Remote Sens. 2012, 78, 53–60. [Google Scholar] [CrossRef]
- International Global Burned Area Satellite Product Validation Protocol. Available online: http://lpvs.gsfc.nasa.gov/DOC/protocol_revised_Apr09.doc (accessed on 1 December 2014).
- Kushla, J.D.; Ripple, W.J. Assessing wildfire effects with Landsat thematic mapper data. Int. J. Remote Sens. 1998, 19, 2493–2507. [Google Scholar] [CrossRef]
- Chuvieco, E.; Congalton, R.G. Mapping and inventory of forest fires from digital processing of TM data. Geocarto Int. 1988, 4, 41–53. [Google Scholar] [CrossRef]
- Koutsias, N.; Karteris, M. Burned area mapping using logistic regression modeling of a single post-fire Landsat-5 Thematic Mapper image. Int. J. Remote Sens. 2000, 21, 673–687. [Google Scholar] [CrossRef]
- Miller, J.D.; Yool, S.R. Mapping forest post-fire canopy consumption in several overstory types using multi-temporal Landsat TM and ETM data. Remote Sens. Environ. 2002, 82, 481–496. [Google Scholar] [CrossRef]
- Hudak, A.T.; Brockett, B.H. Mapping fire scars in a southern African savannah using Landsat imagery. Int. J. Remote Sens. 2004, 25, 3231–3243. [Google Scholar] [CrossRef]
- Smith, A.M.S.; Drake, N.A.; Wooster, M.J.; Hudak, A.T.; Holden, Z.A.; Gibbons, C.J. Production of Landsat ETM+ reference imagery of burned areas within southern African savannahs: Comparison of methods and application to MODIS. Int. J. Remote Sens. 2007, 28, 2753–2775. [Google Scholar] [CrossRef]
- Wulder, M.A.; Masek, J.G.; Cohen, W.B.; Loveland, T.R.; Woodcock, C.E. Opening the archive: How free data has enabled the science and monitoring promise of Landsat. Remote Sens. Environ. 2012, 122, 2–10. [Google Scholar] [CrossRef]
- Pereira, J.M.C.; Sa, A.C.L.; Sousa, A.M.O.; Silva, J.M.N.; Santos, T.N.; Carreiras, J.M.B. Spectral characterisation and discrimination of burnt areas. In Remote Sensing of Large Wildfires in the European Mediterranean Basin; Chuvieco, E., Ed.; Springer-Verlag: Berlin, Germany, 1999; pp. 123–138. [Google Scholar]
- Bastarrika, A.; Chuvieco, E.; Martín, M.P. Mapping burned areas from Landsat TM/ETM+ data with a two-phase algorithm: Balancing omission and commission errors. Remote Sens. Environ. 2011, 115, 1003–1012. [Google Scholar] [CrossRef]
- Stroppiana, D.; Bordogna, G.; Carrara, P.; Boschetti, M.; Boschetti, L.; Brivio, P.A. A method for extracting burned areas from Landsat TM/ETM+ images by soft aggregation of multiple Spectral Indices and a region growing algorithm. ISPRS J. Photogramm. Remote Sens. 2012, 69, 88–102. [Google Scholar] [CrossRef]
- Goodwin, N.R.; Collett, L.J. Development of an automated method for mapping fire history captured in Landsat TM and ETM+ time series across Queensland, Australia. Remote Sens. Environ. 2014, 148, 206–221. [Google Scholar] [CrossRef]
- Koutsias, N.; Pleniou, M.; Mallinis, G.; Nioti, F.; Sifakis, N.I. A rule-based semi-automatic method to map burned areas: Exploring the USGS historical Landsat archives to reconstruct recent fire history. Int. J. Remote Sens. 2013, 34, 7049–7068. [Google Scholar] [CrossRef]
- Bastarrika, A.; Chuvieco, E.; Martín, M.P. Automatic burned land mapping from MODIS time series images: Assessment in Mediterranean ecosystems. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3401–3413. [Google Scholar] [CrossRef]
- Roy, D.P.; Frost, P.G.H.; Justice, C.O.; Landmann, T.; Le Roux, J.L.; Gumbo, K.; Makungwa, S.; Dunham, K.; Du Toit, R.; Mhwandagara, K.; et al. The Southern Africa Fire Network (SAFNet) regional burned area product validation protocol. Int. J. Remote Sens. 2005, 26, 4265–4292. [Google Scholar] [CrossRef]
- Landsat Processing Details. Available online: http://landsat.usgs.gov/Landsat_Processing_Details.php (accessed on 1 December 2014).
- Landsat Surface Reflectance Climate Data Record. Available online: http://landsat.usgs.gov/CDR_LSR.php (accessed on 1 December 2014).
- Chander, G.; Markham, B.L.; Helder, D.L. Summary of current radiometric calibration coefficients for Landsat MSS, TM, ETM+, and EO-1 ALI sensors. Remote Sens. Environ. 2009, 113, 893–903. [Google Scholar] [CrossRef]
- Landsat 8 Quality Assessment Band. Available online: https://landsat.usgs.gov/L8QualityAssessmentBand.php (accessed on 1 December 2014).
- Zhu, Z.; Woodcock, C.E. Object-based cloud and cloud shadow detection in Landsat imagery. Remote Sens. Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- Roy, D.; Landmann, T. Characterizing the surface heterogeneity of fire effects using multi-temporal reflective wavelength data. Int. J. Remote Sens. 2005, 19, 4197–4218. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.W.; Schell, J.A.; Deering, D.H.; Harlan, J.C. Monitoring the Vernal Advancement and Retrogradation (Greenwave Effect) of Natural Vegetation; NASA/GSFC: Greenbelt, MD, USA, 1974. [Google Scholar]
- Martín, M.P.; Gómez, I.; Chuvieco, E. Burnt Area Index (BAIM) for burned area discrimination at regional scale using MODIS data. For. Ecol. Manag. 2006, 234, S221–S221. [Google Scholar] [CrossRef]
- Pinty, B.; Verstraete, M.M. GEMI: A non-linear index to monitor global vegetation from satellites. Vegetatio 1992, 101, 15–20. [Google Scholar] [CrossRef]
- Key, C.H.; Benson, N.C. The Normalized Burn Ratio (NBR): A Landsat TM Radiometric Measure of Burn Severity; U.S. Department of the Interior, Northern Rocky Mountain Science Center: Washington, DC, USA, 1999.
- Trigg, S.; Flasse, S. Characterizing the spectral-temporal response of burned savannah using in situ spectroradiometry and infrared thermometry. Int. J. Remote Sens. 2000, 21, 3161–3168. [Google Scholar] [CrossRef]
- Chuvieco, E.; Englefield, P.; Trishchenko, A.P.; Luo, Y. Generation of long time series of burn area maps of the boreal forest from NOAA-AVHRR composite data. Remote Sens. Environ. 2008, 112, 2381–2396. [Google Scholar] [CrossRef]
- Chuvieco, E.; Opazo, S.; Sione, W.; del Valle, H.; Anaya, J.; Di Bella, C.; Cruz, I.; Manzo, L.; López, G.; Mari, N.; et al. Global burned-land estimation in Latin America using MODIS composite data. Ecol. Appl. 2008, 18, 64–79. [Google Scholar] [CrossRef]
- ESA fire_cci Project. Available online: http://www.esa-fire-cci.org/ (accessed on 1 December 2014).
- CEOS Fire Product Validation. Available online: http://lpvs.gsfc.nasa.gov/fire_home.html (accessed on 1 December 2014).
- Earth Explorer. Available online: http://earthexplorer.usgs.gov (accessed on 1 December 2014).
- National MTBS Burned Boundaries Dataset. Available online: http://www.mtbs.gov/nationalregional/burnedarea.html (accessed on 1 December 2014).
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- USGS. Burned Area Product. Available online: http://remotesensing.usgs.gov/ecv/BA_overview.php (accessed on 1 December 2014).
- Burned Area Mapping Software. Available online: http://bastarrika.wordpress.com/ (accessed on 1 December 2014).
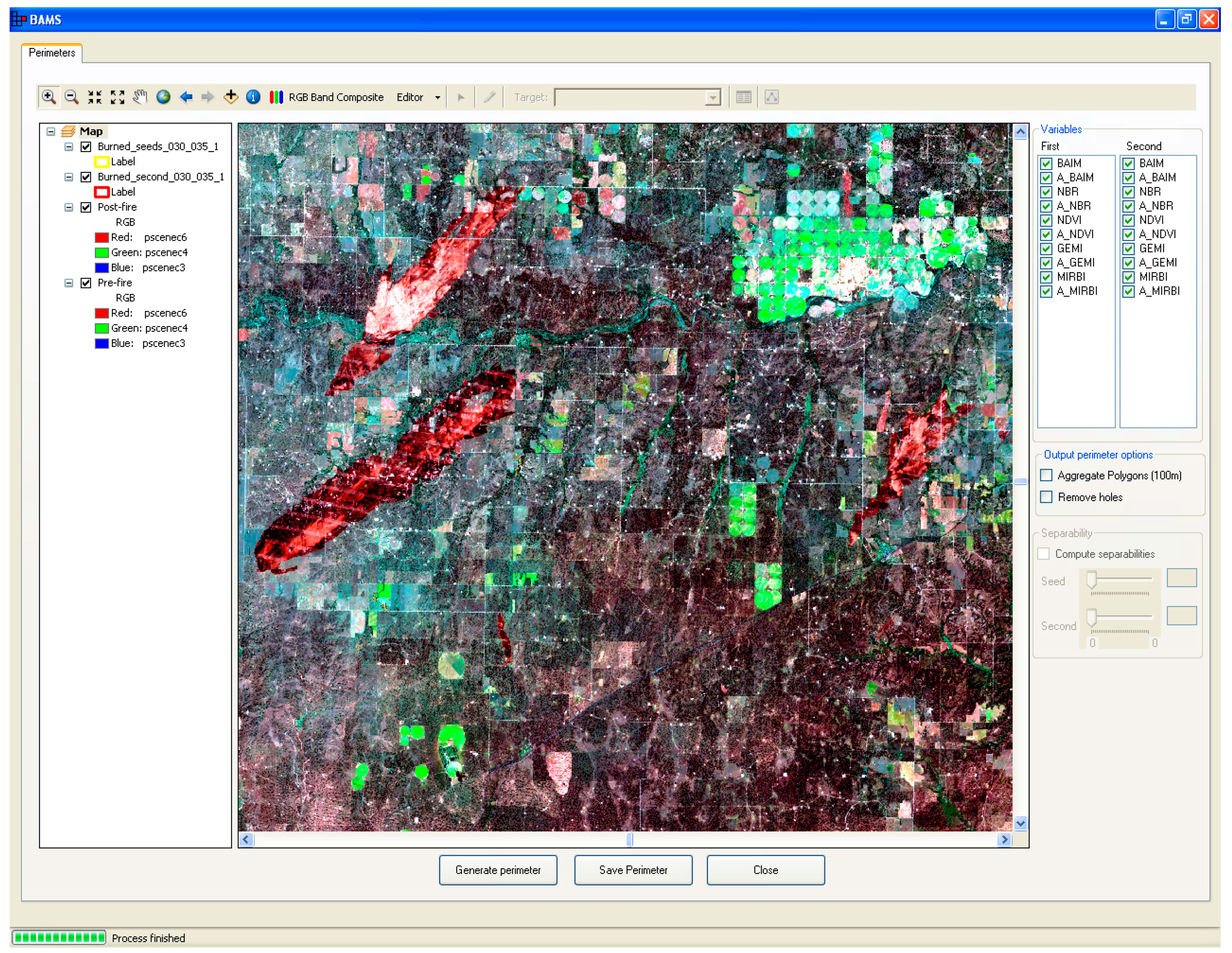
Appendix: Description of the BAMS Software Tool


- Table of Contents (left section), where four layers are automatically displayed
- ▪
- Burned_seeds_path_row_count.shp: The shapefile where the training polygons for the seed phase will be saved (yellow lines)
- ▪
- Burned_second_path_row_count.shp: The shapefile where the training polygons for the second phase will be saved (red lines)
- ▪
- Post-fire: Color composite for the post-fire scene (SWIRL-NIR-RED composite band as default)
- ▪
- Pre-fire: Color composite for the pre-fire scene (same color composite as the previous)
- Main toolbar (top section), where the usual ArcGIS map navigation tools are available, along with an Editor button that allows for editing of the training polygons (both for the seeds or the second phase), and a BAMS custom tool to change the default color composite and apply some basic enhancing options to the scenes.
- Map area (center section): The area where the scenes, the burned samples, and the iteration results will be loaded.
- Variables area (right section): In this section, the user can select the variables to define the first and second phases of the algorithm. By default, BAIM, NBR, MIRBI, NDVI, and GEMI post- and pre-variables are checked, but they can be unchecked if they don’t show enough differences between the burned and unburned classes. These variables can also be loaded into the map area by selecting them from the list (left click) and clicking in the “Add to Map” contextual dialogue.
- Output perimeter options (bottom-right section): In this section, the aggregation polygons with a fixed distance to 100 meters and the option to remove the internal polygons to obtain only the boundary of the fires are available.


© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bastarrika, A.; Alvarado, M.; Artano, K.; Martinez, M.P.; Mesanza, A.; Torre, L.; Ramo, R.; Chuvieco, E. BAMS: A Tool for Supervised Burned Area Mapping Using Landsat Data. Remote Sens. 2014, 6, 12360-12380. https://doi.org/10.3390/rs61212360
Bastarrika A, Alvarado M, Artano K, Martinez MP, Mesanza A, Torre L, Ramo R, Chuvieco E. BAMS: A Tool for Supervised Burned Area Mapping Using Landsat Data. Remote Sensing. 2014; 6(12):12360-12380. https://doi.org/10.3390/rs61212360
Chicago/Turabian StyleBastarrika, Aitor, Maite Alvarado, Karmele Artano, Maria Pilar Martinez, Amaia Mesanza, Leyre Torre, Rubén Ramo, and Emilio Chuvieco. 2014. "BAMS: A Tool for Supervised Burned Area Mapping Using Landsat Data" Remote Sensing 6, no. 12: 12360-12380. https://doi.org/10.3390/rs61212360
APA StyleBastarrika, A., Alvarado, M., Artano, K., Martinez, M. P., Mesanza, A., Torre, L., Ramo, R., & Chuvieco, E. (2014). BAMS: A Tool for Supervised Burned Area Mapping Using Landsat Data. Remote Sensing, 6(12), 12360-12380. https://doi.org/10.3390/rs61212360