
Comparison of Spatiotemporal Fusion Models: A Review


Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Band Type | Spatial Resolution | Global Revisit Cycle | Operational Period | Access |
|---|---|---|---|---|---|
| Worldview | Panchromatic | *** | * | 2007–present | Commercial |
| Multi-spectral | *** | * | 2007–present | Commercial | |
| Geoeye | Panchromatic | *** | * | 2008–present | Commercial |
| Multi-spectral | *** | * | 2008–present | Commercial | |
| Quickbird | Multi-spectral | *** | * | 2001–present | Commercial |
| IKONOS | Panchromatic | *** | * | 1999–present | Commercial |
| Multi-spectral | *** | * | 1999–present | Commercial | |
| SPOT | Panchromatic | *** | * | 1986–present | Commercial |
| Multi-spectral | ** | * | 1986–present | Commercial | |
| ALOS | Panchromatic | *** | * | 2006–2011 | Commercial |
| Multi-spectral | ** | * | 2006–2011 | Commercial | |
| ZY-3 | Panchromatic | *** | * | 2012–present | Commercial |
| Multi-spectral | ** | * | 2012–present | Commercial | |
| Landsat | Panchromatic | ** | * | 1972–present | Free |
| Multi-spectral | ** | * | 1972–present | Free | |
| ASTER | Multi-spectral | ** | * | 1999–present | Free |
| Hyperion | Hyper-spectral | ** | * | 2000–present | Free |
| HJ-A/B | Charge-coupled Device | ** | * | 2008–present | Free |
| Hyper-spectral | * | * | 2008–present | Free | |
| MERIS | Multi-spectral | * | * | 2002–2012 | Free |
| MODIS | Multi-spectral | * | *** | 2000–present | Free |
| AVHRR | Multi-spectral | * | *** | 1982–present | Free |
| SPOT-VGT | Multi-spectral | * | *** | 1998–present | Free |
| GOES | Multi-spectral | * | *** | 1975–present | Free |
2. Materials and Methods
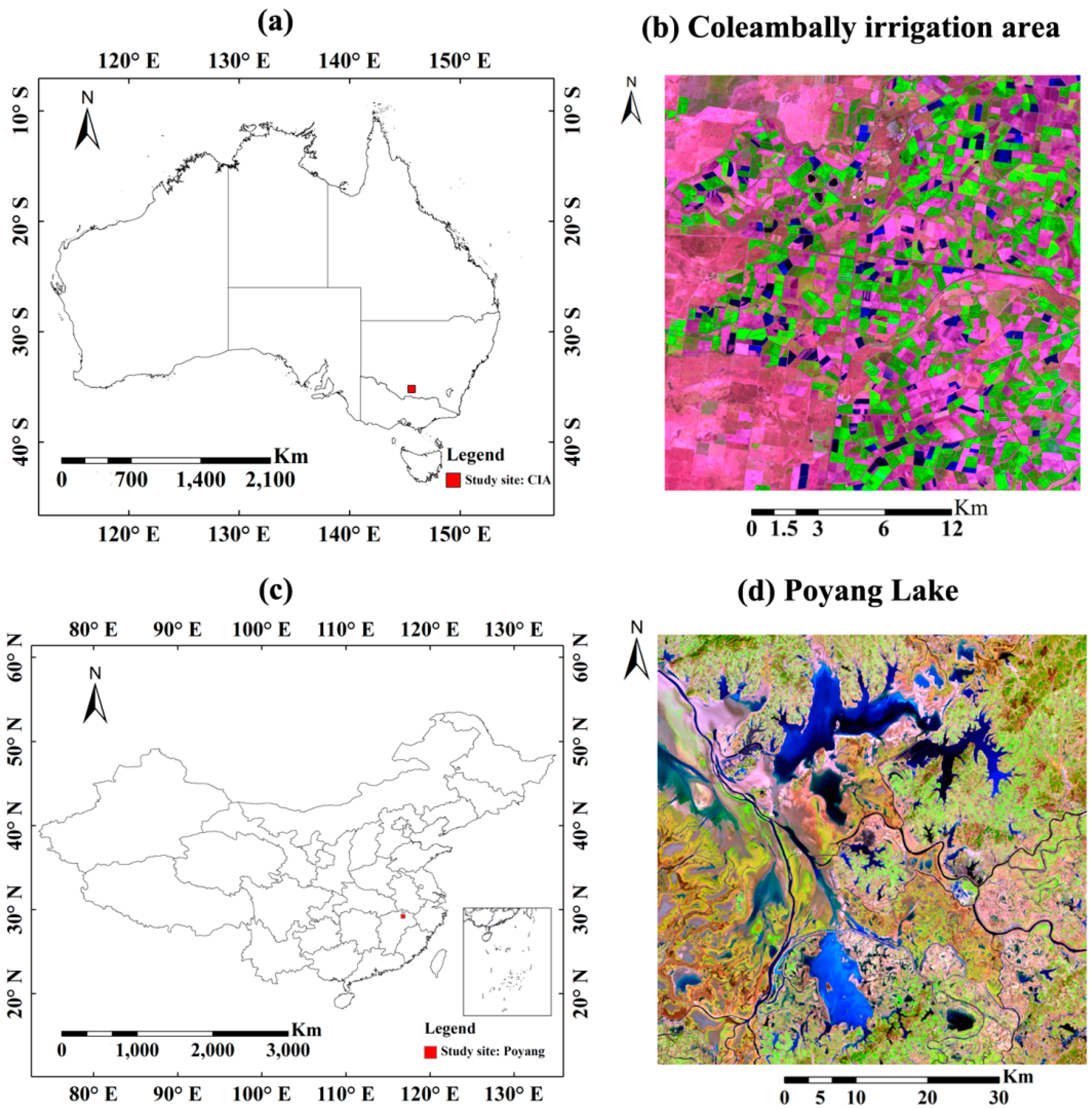
2.1. Study Site Description and Data Preparation

| Image | CIA | Image | PLW |
|---|---|---|---|
| # | Date | # | Date |
| 1 | 2001/10/08 | 1 | 2004/02/15 |
| 2 | 2001/10/17 | 2 | 2004/04/19 |
| 3 | 2001/11/02 | 3 | 2004/05/05 |
| 4 | 2001/11/09 | 4 | 2004/07/24 |
| 5 | 2001/11/25 | 5 | 2004/08/09 |
| 6 | 2001/12/04 | 6 | 2004/09/26 |
| 7 | 2001/01/05 | 7 | 2004/10/12 |
| 8 | 2002/01/12 | 8 | 2004/10/28 |
| 9 | 2002/02/13 | 9 | 2004/11/29 |
| 10 | 2002/02/22 | 10 | 2004/12/15 |
| 11 | 2002/03/10 | ||
| 12 | 2002/03/17 | ||
| 13 | 2002/04/02 | ||
| 14 | 2002/04/11 | ||
| 15 | 2002/04/18 | ||
| 16 | 2002/04/27 | ||
| 17 | 2002/05/04 |
2.2. Selected Spatiotemporal Fusion Models
2.2.1. STARFM
- (i)
- One fine-resolution image is used to select candidate similar neighbor pixels using a threshold method. The threshold is determined by the standard deviation of the fine-resolution images and the estimated number of land-cover types.
- (ii)
- Sample filtering is applied to remove poor quality observations from the candidates, which introduces constraint functions to ensure the quality of the selected similar pixels.
- (iii)
- The weights corresponding to each similar pixel are computed with a combined function using the spectral difference, temporal difference, and distance difference.
- (iv)
- The final surface reflectance on the targeted date is predicted with the incorporation of the fine- and coarse-resolution data through the proposed weight function.
2.2.2. ESTARFM
- (i)
- Similar neighbor pixels are selected from the fine-resolution data on both the prior and posterior dates using the same threshold method as STARFM. The final set of similar pixels is determined by an intersection operation of the results derived from the individual selection in the initial step.
- (ii)
- The weights for all of the similar pixels are determined by the spectral similarity and geographic distance between the targeted pixel and similar pixels.
- (iii)
- The conversion coefficients are computed from the surface reflectance of the fine- and coarse-resolution data during the observation period using a linear regression.
- (iv)
- The two transition images on the targeted date are predicted using the combined function of the fine- and coarse-resolution data and the weight and conversion coefficients.
- (v)
- The final fine-resolution prediction is calculated by incorporating the two transition images in step (iv) through a weight function, which depends on the spectral difference of the coarse-resolution data on the base date and the predicted date.
2.2.3. ISTARFM
- (i)
- Adaptively choose blending modes. ISTARFM first performs a choice for prediction modes according to the number of input L-M pairs within a time-window.
- (ii)
- Similar neighboring pixels are selected from the fine-resolution data through local rules with a logistic constraint function. For one-pair prediction mode, the final similar pixels are retrieved from its individual selection; for multi-pair prediction mode, the final set of similar pixels is retrieved by an intersection operation on the results derived from the individual selection.
- (iii)
- The weights for all similar pixels are determined by four factors: fine-coarse resolution data difference, spectral similarity for fine-resolution data, selective temporal difference and spatial difference.
- (iv)
- The final fine-resolution prediction is calculated by incorporating observed fine- and coarse-resolution data through a weight function in step (iii).
2.2.4. SPSTFM
- (i)
- High-frequency patches are extracted for dictionary learning. The difference images of the fine- and coarse-resolution data on the prior and posterior dates are extracted for jointly training two dictionaries of high-frequency feature patches.
- (ii)
- Dictionary-pair learning is conducted with the two input difference images using an optimization equation under the theoretical basis of sparse representation and sparse coding. The optimal solution to obtain the best dictionary sets Dl and Dm is K-SVD [49].
- (iii)
- The fine-resolution patches are reconstructed using the enforced same sparse coefficient and the dictionary set Dl, after obtaining the sparse coefficient of the coarse-resolution patch with respect to the dictionary set Dm.
- (iv)
- The fine-resolution reflectance is predicted. Considering the heterogeneity of local changes in actual remote sensing images, the general reconstruction is converted from the image scale to the patch scale using different local weights. The NDVI and normalized difference built-up index (NDBI) are also taken into consideration to measure the change information.
2.3. Comparison Type Setting
2.4. Quantifying Spatiotemporal Comparability
2.5. Quantifying Landscape Heterogeneity
2.6. Assessing Prediction Accuracy
3. Results
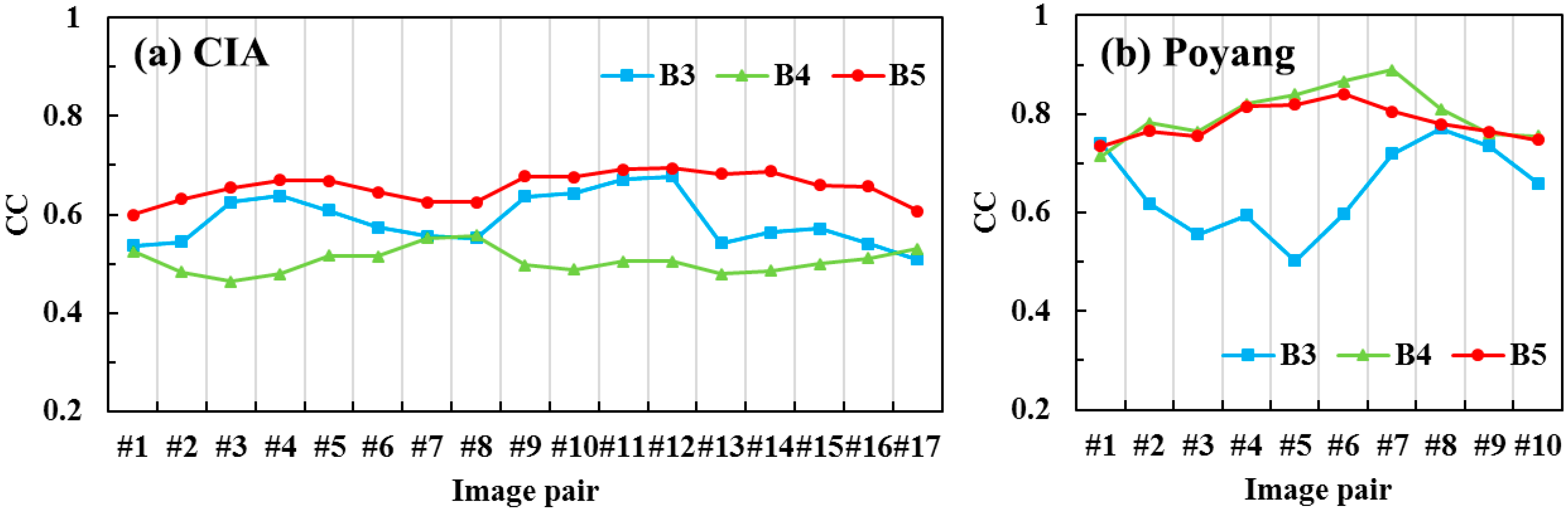
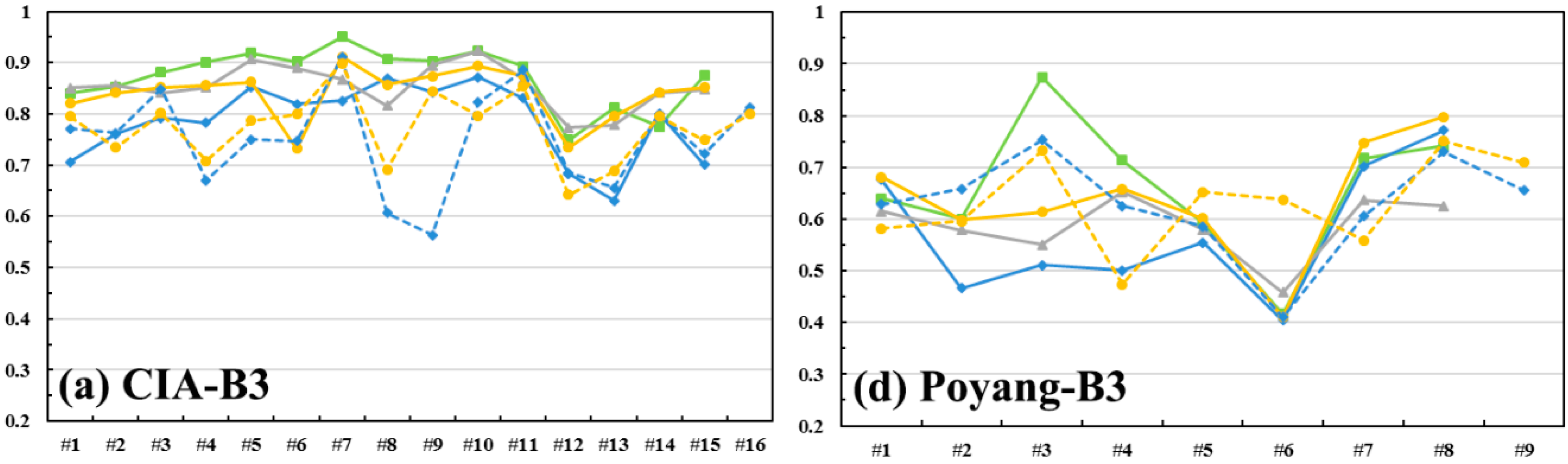
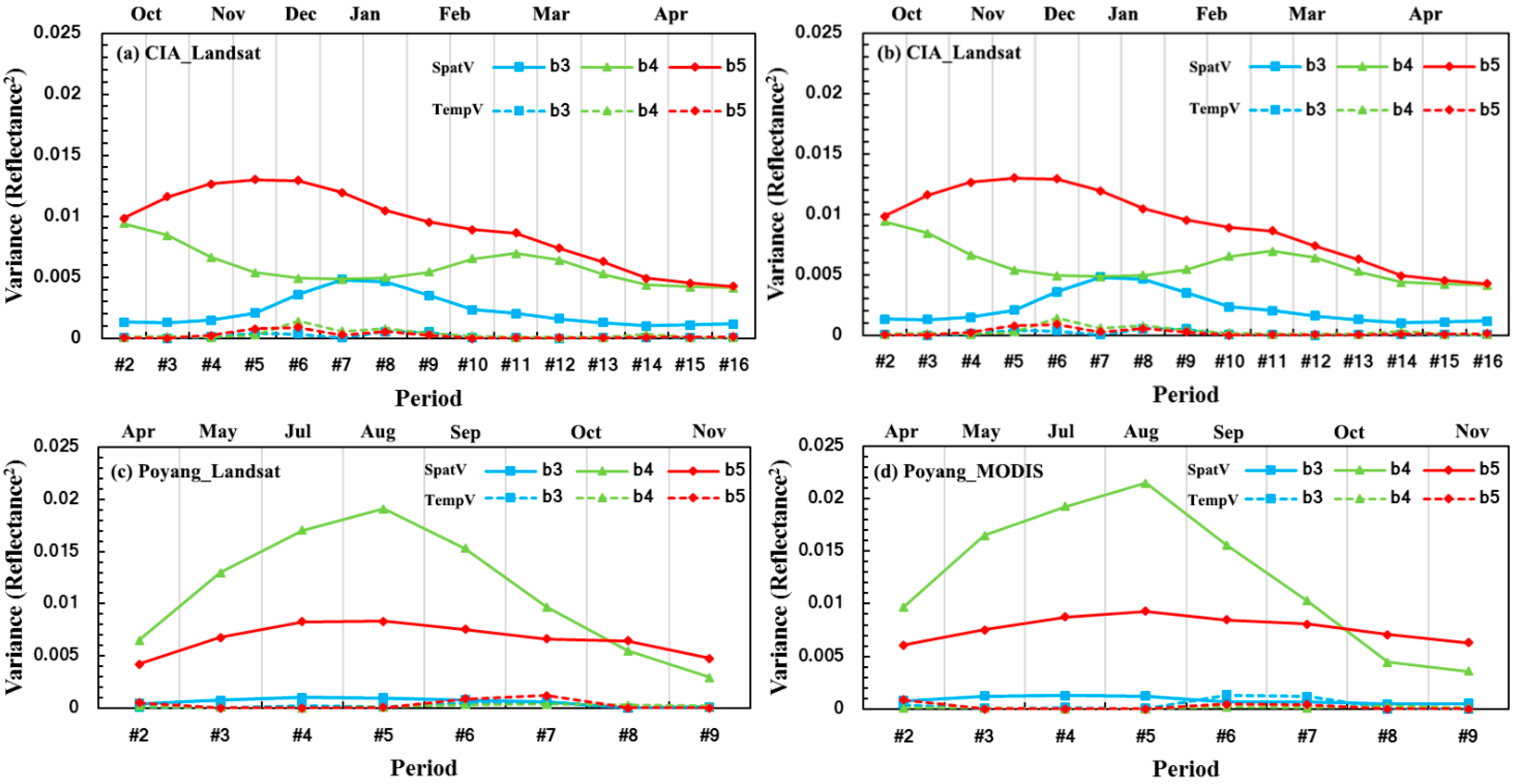
3.1. Spatiotemporal Comparability


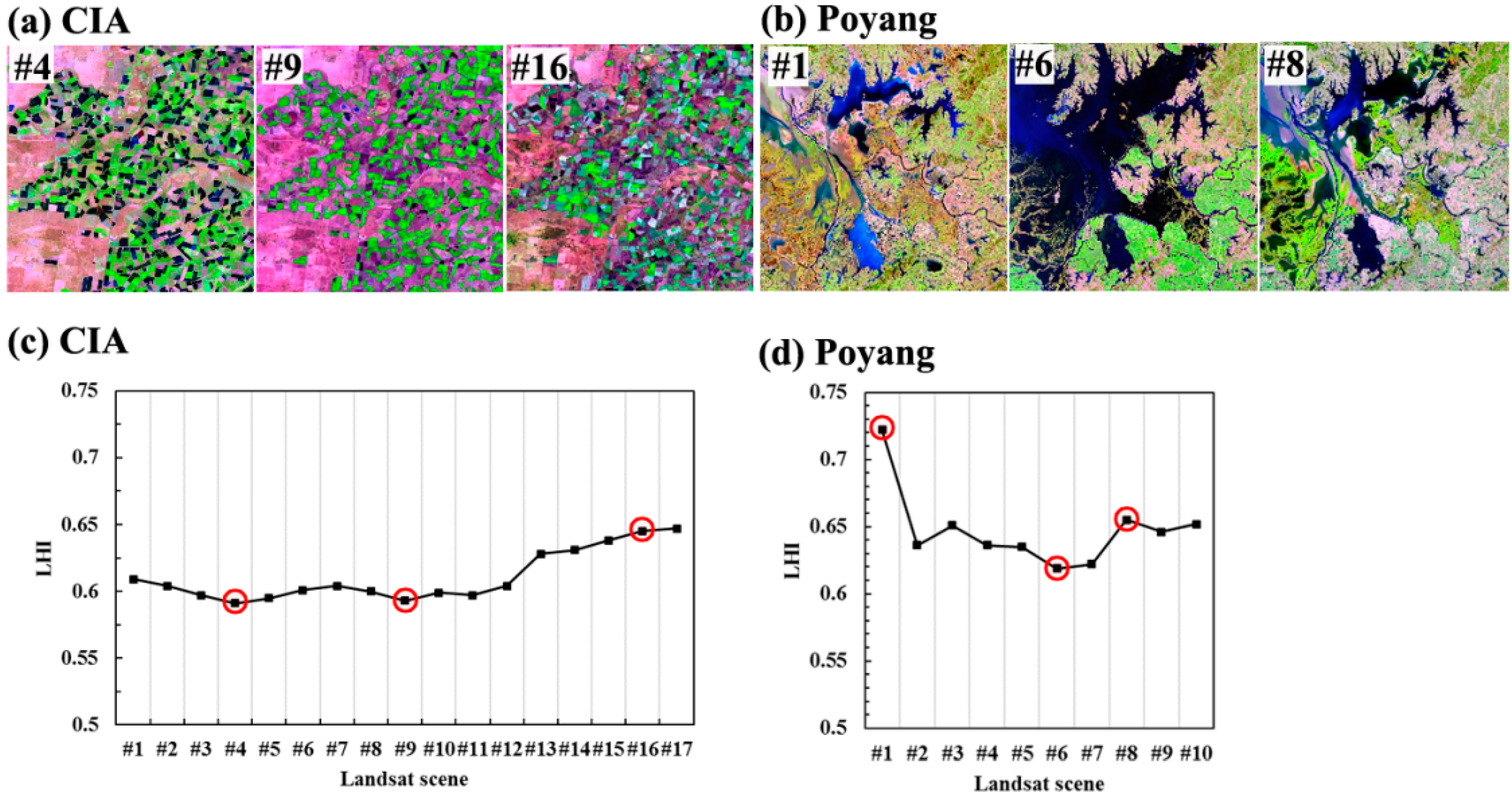
3.2. Landscape Heterogeneity Changes

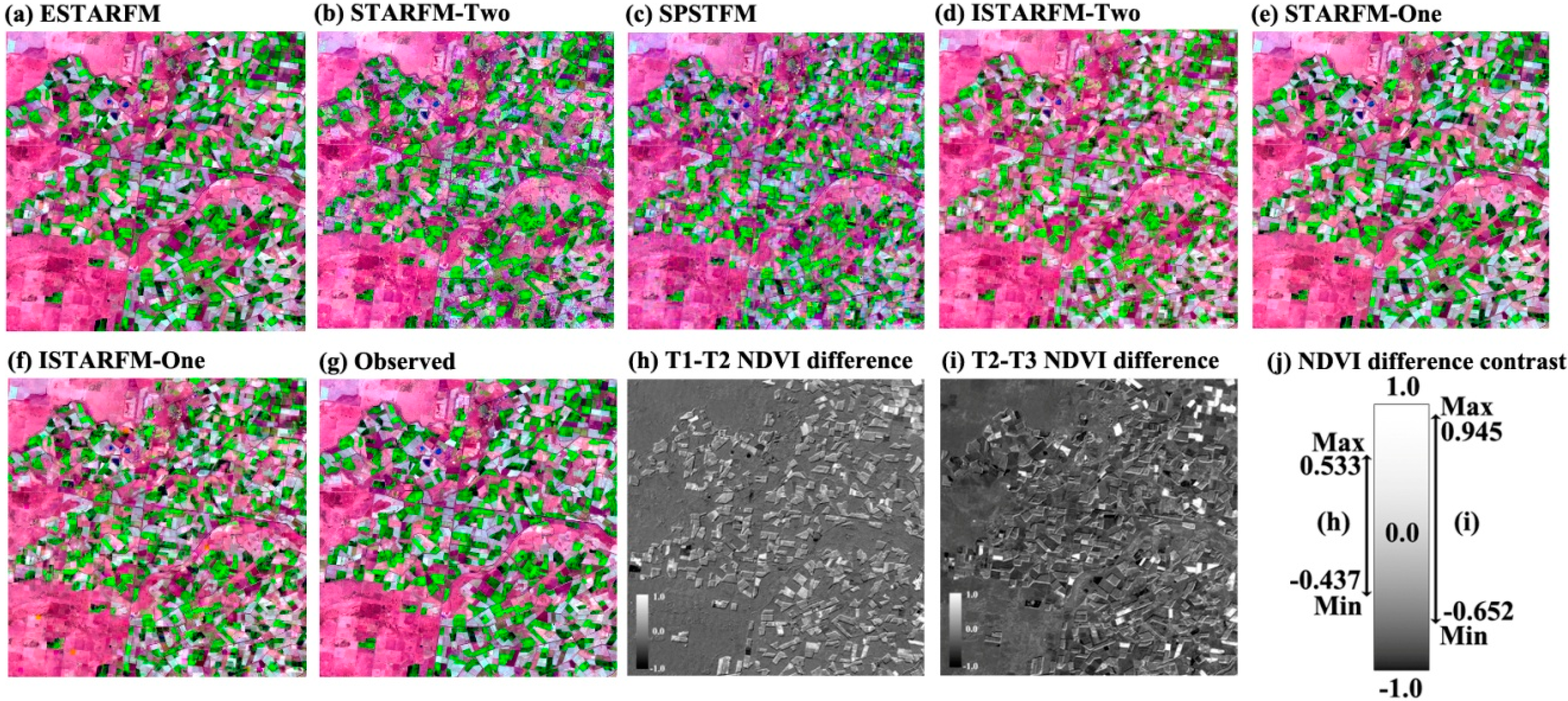
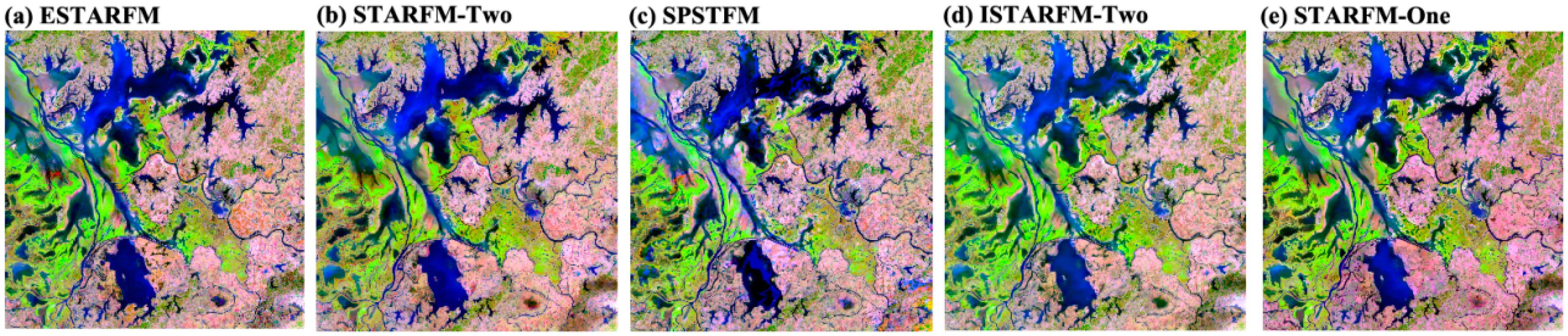
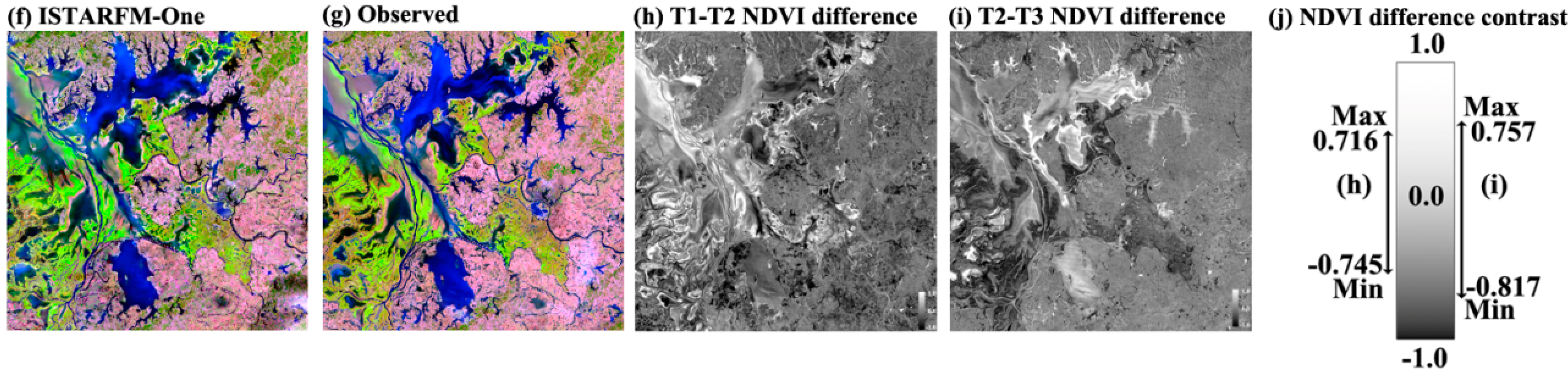
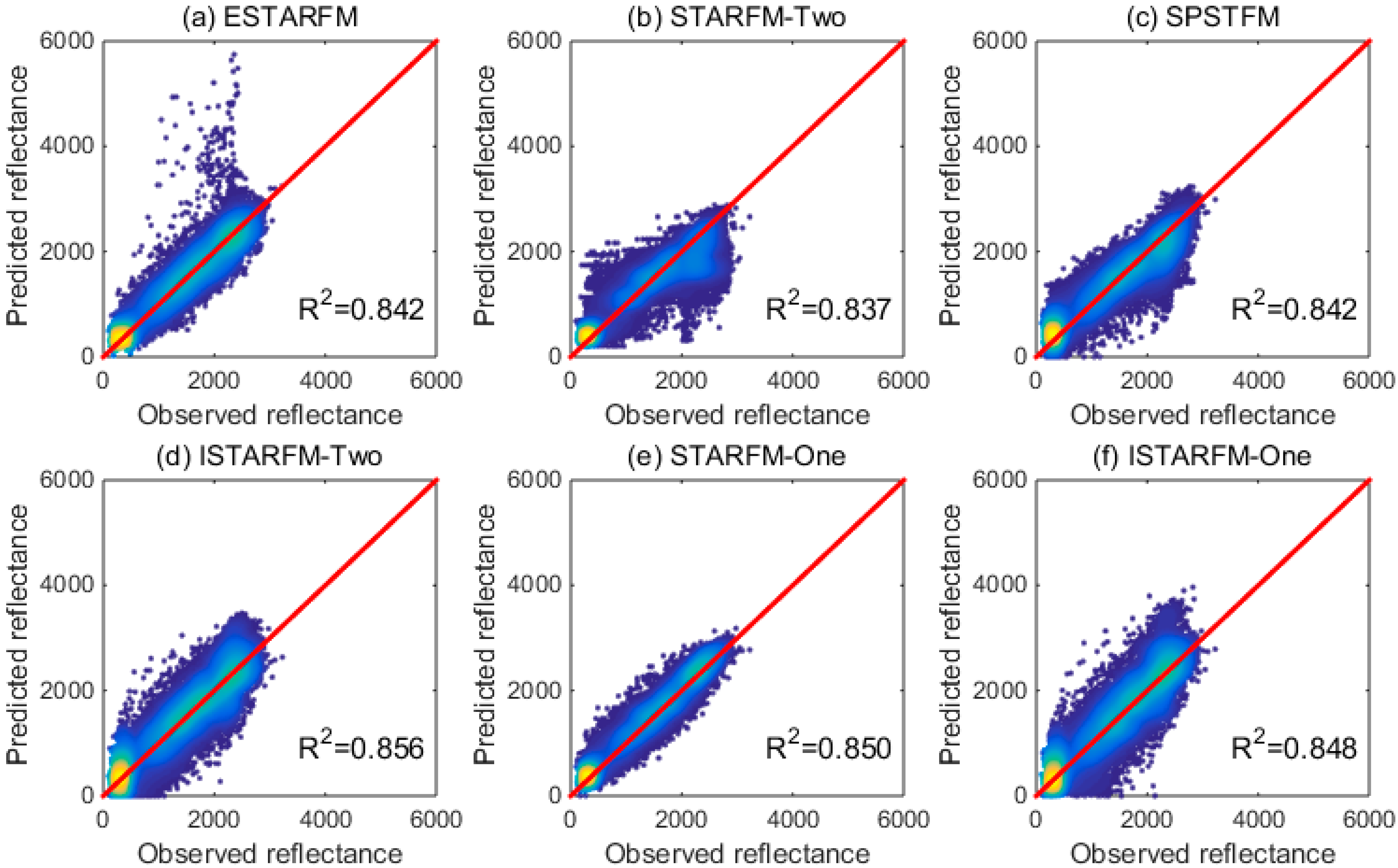
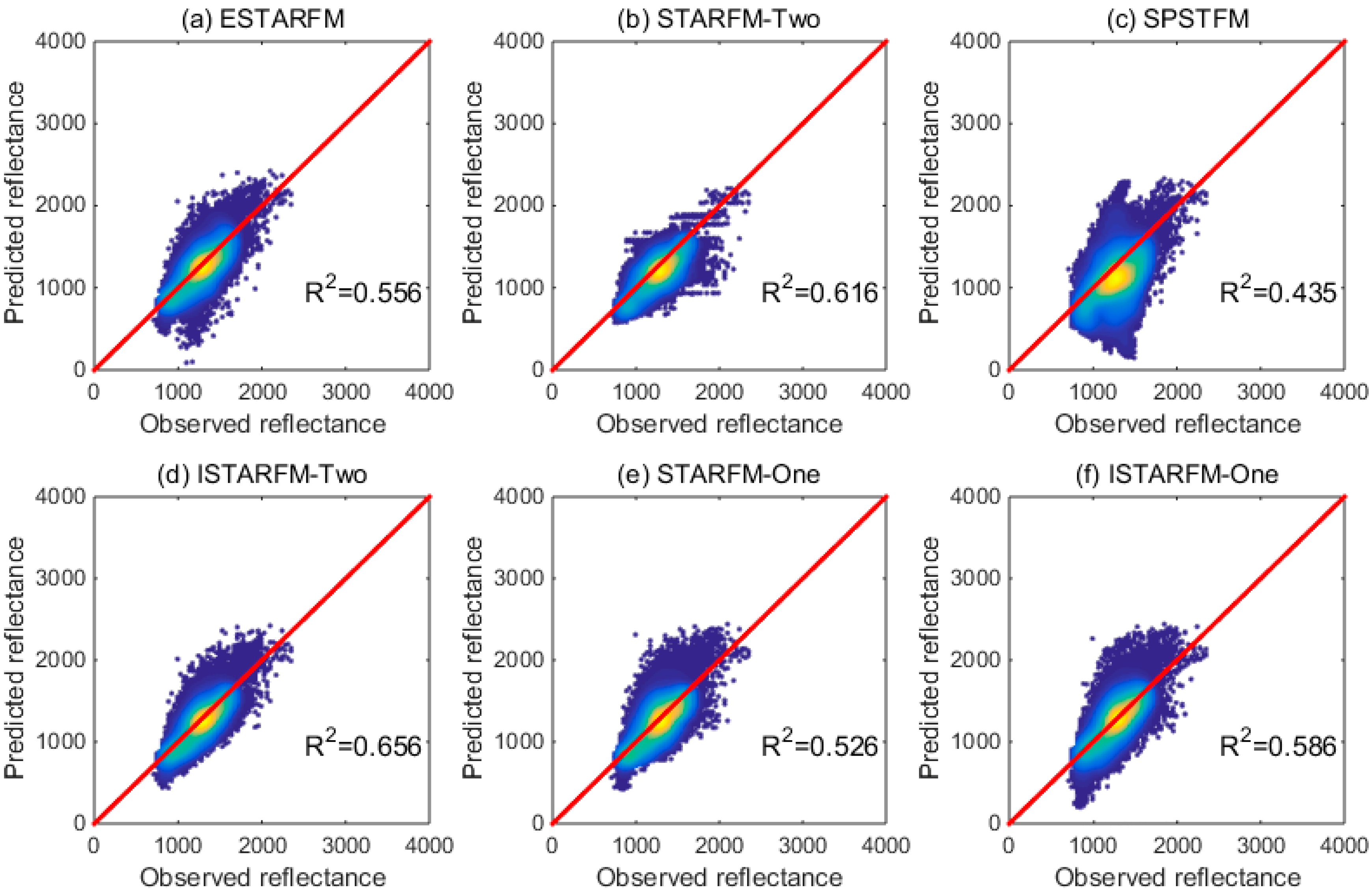
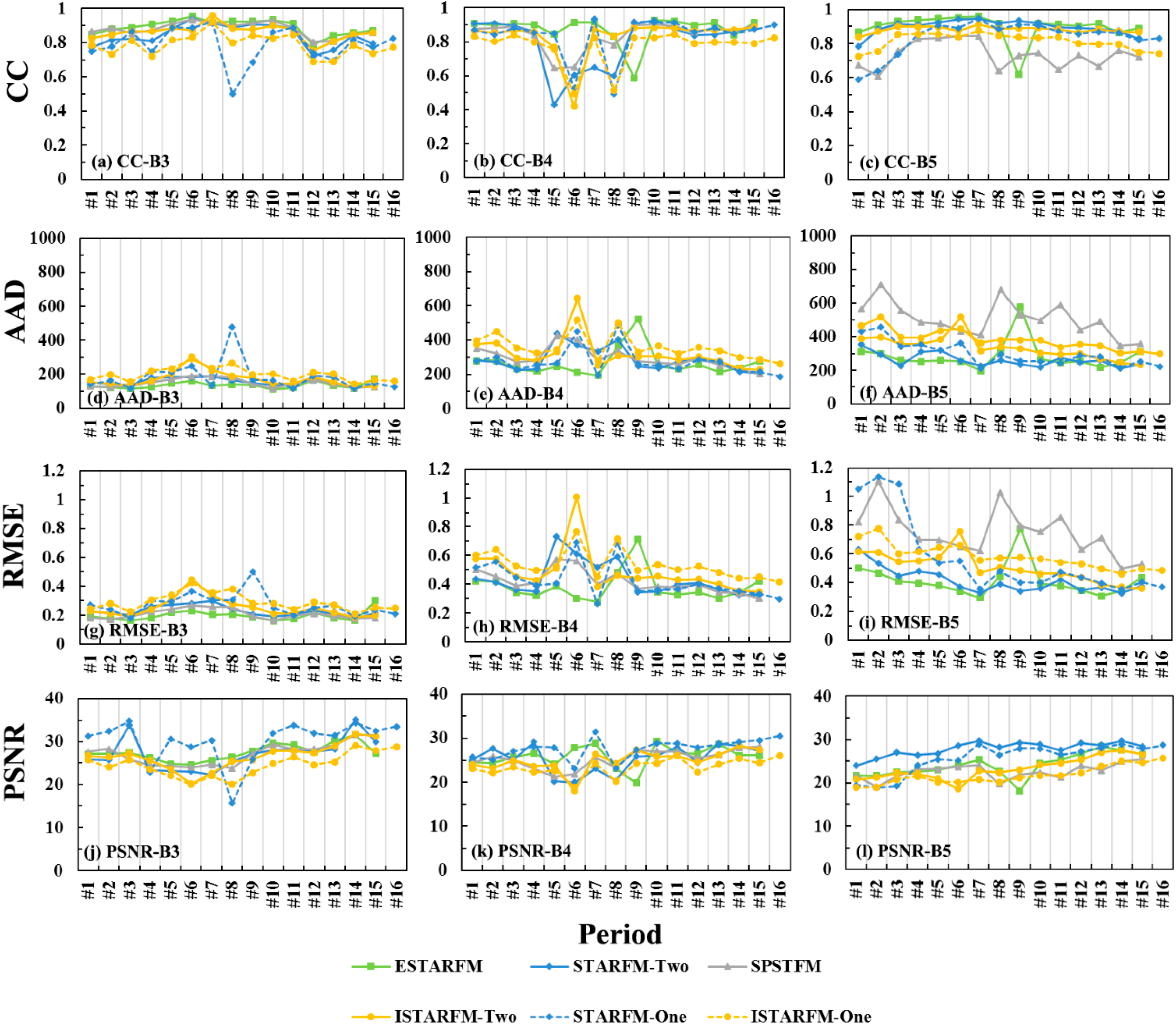
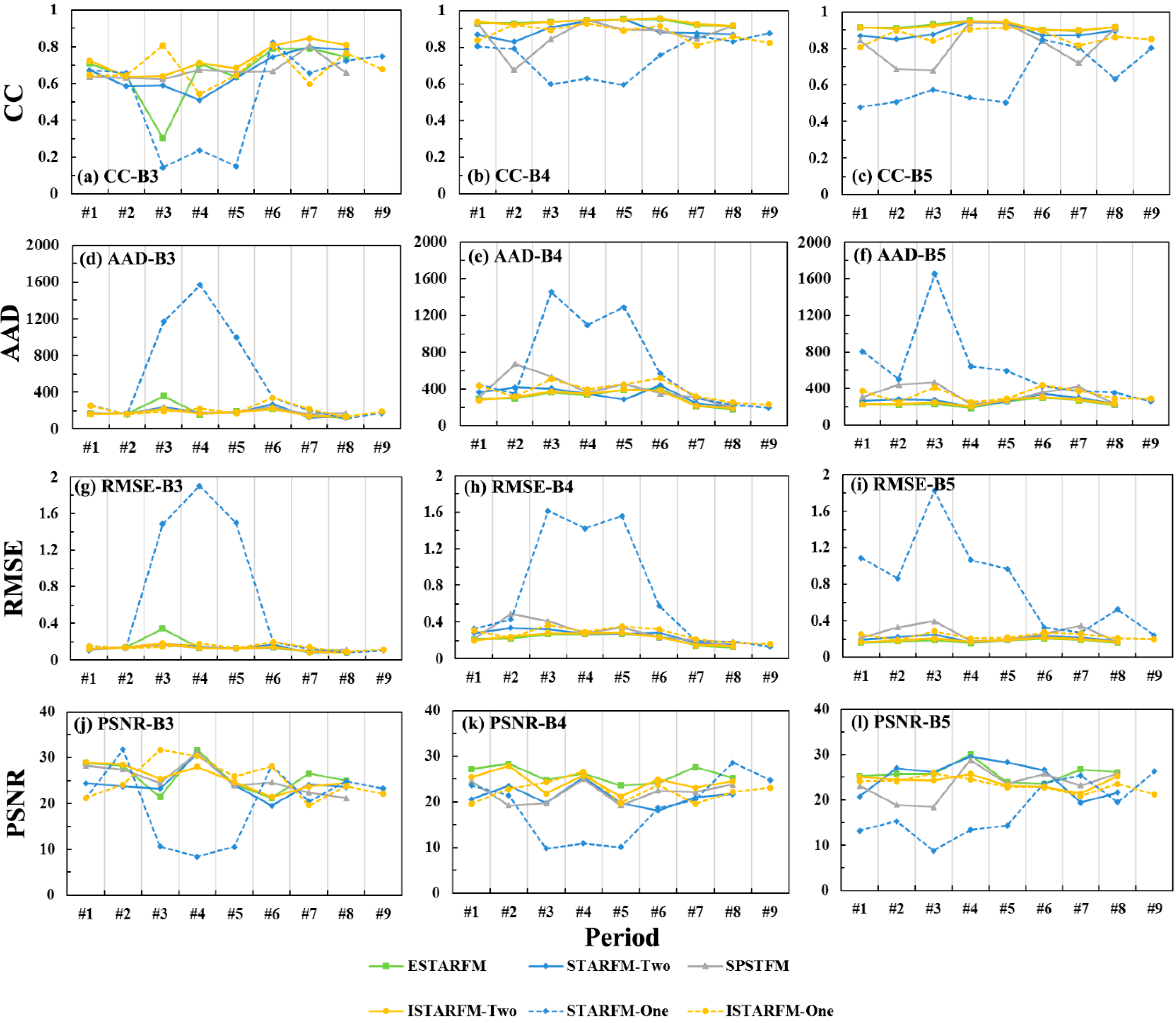
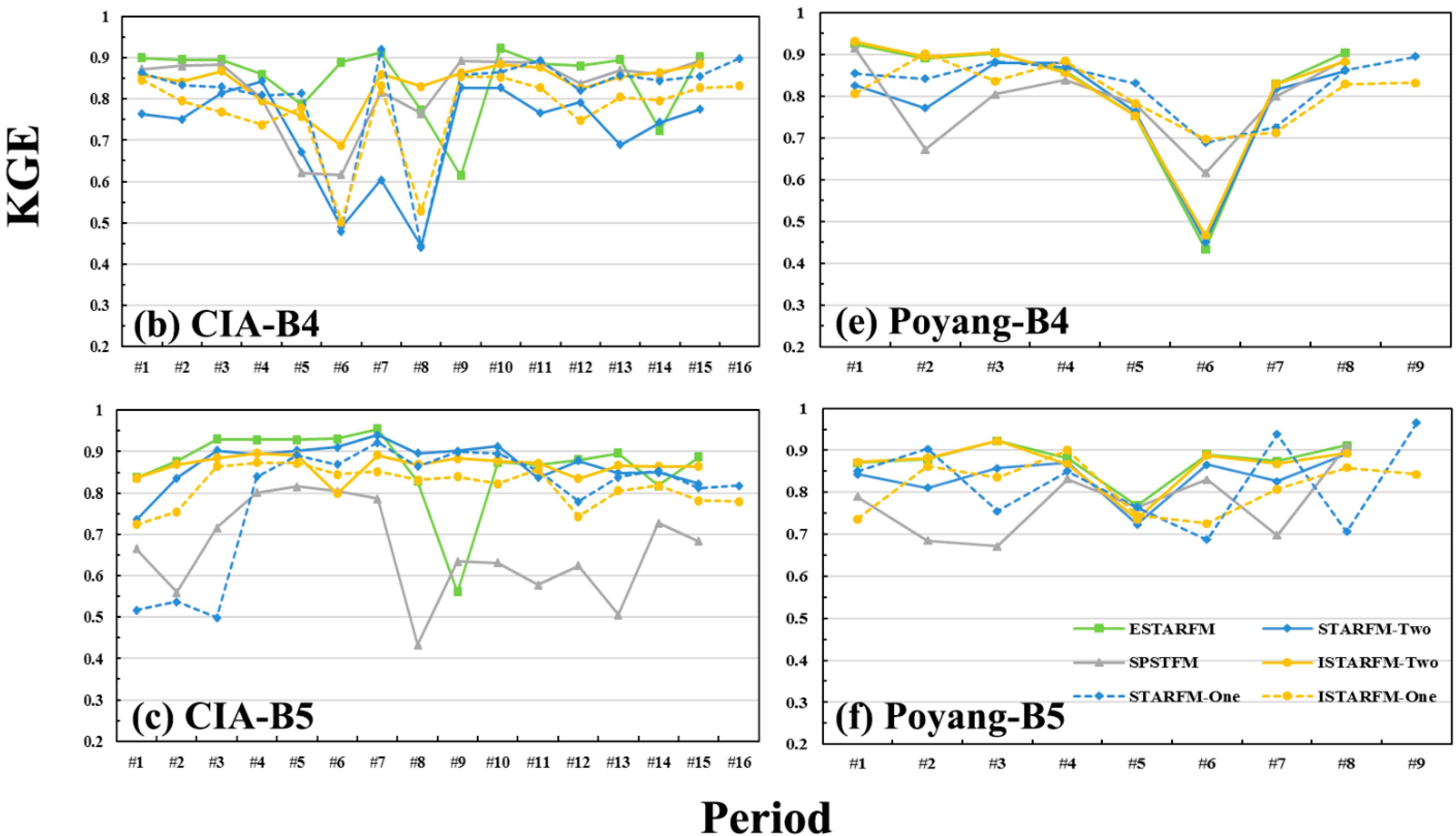
3.3. Prediction Performance





3.4. Accuracy Assessment




4. Discussion
4.1. Selected Blending Models Performance
| Band | B3 | B4 | B5 | |
|---|---|---|---|---|
| Mode | ||||
| #1~#4 | 0.42 | 0.52 | 0.60 | |
| #2~#4 | 0.58 | 0.56 | 0.74 | |
| #3~#4 | 0.79 | 0.62 | 0.83 | |
| #4~#5 | 0.76 | 0.75 | 0.89 | |
| #4~#6 | 0.59 | 0.53 | 0.79 | |
| #4~#7 | 0.39 | 0.14 | 0.73 | |
| #4~#8 | 0.40 | 0.10 | 0.74 | |
| Criteria | KGE | CC | ||||||
|---|---|---|---|---|---|---|---|---|
| Mode | Band | B3 | B4 | B5 | B3 | B4 | B5 | |
| #1~#4 | 0.50 | 0.71 | 0.42 | 0.50 | 0.76 | 0.47 | ||
| #2~#4 | 0.65 | 0.72 | 0.51 | 0.65 | 0.80 | 0.61 | ||
| #3~#4 | 0.86 | 0.81 | 0.50 | 0.86 | 0.88 | 0.73 | ||
| Criteria | KGE | CC | ||||||
|---|---|---|---|---|---|---|---|---|
| Mode | Band | B3 | B4 | B5 | B3 | B4 | B5 | |
| #3~#4~#5 | 0.87 | 0.90 | 0.92 | 0.88 | 0.90 | 0.92 | ||
| #3~#4~#6 | 0.85 | 0.88 | 0.91 | 0.86 | 0.88 | 0.91 | ||
| #3~#4~#7 | 0.83 | 0.85 | 0.91 | 0.85 | 0.86 | 0.91 | ||
| #3~#4~#8 | 0.84 | 0.85 | 0.90 | 0.85 | 0.85 | 0.91 | ||
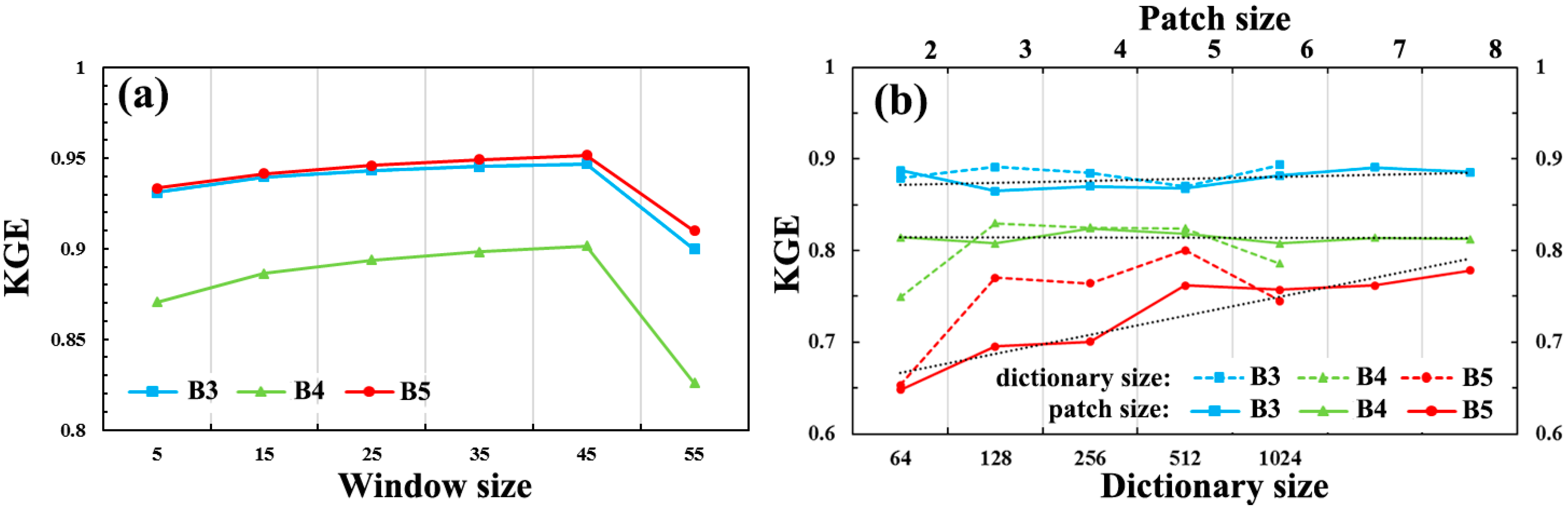
4.2. Model Parameter Selection


| Window Size | Time Cost | Patch Size | Time Cost | Dictionary Size | Time Cost |
|---|---|---|---|---|---|
| 5 | 8 m 59.58 s | 2 | 4 m 26.96 s | 64 | 2 m 14.53 s |
| 15 | 11 m 19.39 s | 3 | 4 m 29.25 s | 128 | 2 m 33.83 s |
| 25 | 15 m 50.02 s | 4 | 4 m 30.42 s | 256 | 3 m 10.12 s |
| 35 | 21 m 47.90 s | 5 | 4 m 30.68 s | 512 | 4 m 30.42 s |
| 45 | 29 m 52.33 s | 6 | 4 m 32.21 s | 1024 | 7 m 30.40 s |
| 55 | 39 m 8.80 s | 7 | 4 m 50.66 s | ||
| 8 | 4 m 50.90 s |
4.3. Problems with Existing Blending Models
5. Conclusions
- (i)
- The reconstruction-based models have more stable performance than the learning-based model. Overall, ISTARFM-Two and ESTARFM performed more stably than other models. However, it should be noted that learning-based models such as SPSTFM offer promises to overcome fundamental problems in spatiotemporal fusion, e.g., capturing both phenological and land cover changes and integrating spatiotemporal with spatiospectral fusions [52]. Given the complexity of dictionary learning and sparse representation, more studies are required to further improve such models.
- (ii)
- The spatiotemporal comparability of the input L-M pairs may not be the critical factor impacting prediction accuracy. However, it can be considered an optional reference for evaluating spatiotemporal fusion performance, especially for the same study site.
- (iii)
- Landscape heterogeneity was shown to affect the model performance significantly. A more complex landscape creates higher prediction uncertainty for spatiotemporal fusion applications.
- (iv)
- Landscape spatiotemporal variances were shown to be strongly associated with model performance. ESTARFM performed better than STARFM-Two when spatial variance was dominant in a given site. ISTARFM and STARFM worked better when temporal variance was dominant. However, ISTARFM could perform better than STARFM in predicting situations where significant spatial variance occurred, for its combination with a time-window and pre-selection of input L-M pairs. SPSTFM does not seem to be sensitive to land cover spatiotemporal variance.
- (v)
- More input L-M pairs did not always ensure higher prediction accuracy. The correlation coefficient of coarse-resolution data between base and predicted dates should be an importance reference for selecting input L-M pairs when more than two L-M pairs exist, especially for the STARFM model.
- (vi)
- A higher computational cost (e.g., larger moving window size for the reconstruction-based model, larger dictionary size for the learning-based model) could not ensure better prediction accuracy.
Acknowledgments
Author Contributions
Appendix
| # | Literature | Algorithm | Study Region | Land-Cover Types | Data Acquisition Dates | Focus of Research | Assessment Method |
|---|---|---|---|---|---|---|---|
| 1 | Acerbi-Junior et al. (2006) [20] | Wavelet-T | Brazilian Savannas | Cerrado patches, eucalyptus plantations, agricultural plots, gallery forests, grassland, and degraded areas | _____ | Used three types of wavelet transforms to perform the fusion between MODIS and Landsat TM images. Provided a conceptual framework for improving the spatial resolution with minimal distortion of the spectral content of the source image. | Mean bias; Bias variance |
| 2 | Gao et al. (2006) [2] | STARFM | The BOREAS southern study area (104°W, 54°N) | Forest and sparse vegetation | 4 L-M pairs; 2001/05/24, 2001/07/11, 2001/08/12, 2001/09/29 | Tested STARFM’s ability to capture seasonal changes over forested regions. | Mean bias; AD |
| Western Iowa (95.7°W, 42.1°N) | Cropland | 1 L-M pair; 2001/07/28, 2001/08/29 | Validated that the existence of “pure pixels” significantly affected the prediction accuracy. | AD | |||
| Eastern Virginia scene (77°W, 38°N) | Deciduous forest, evergreen forest, mixed forest, and some cropland | 3 L-M pairs; 2001/02/07, 2001/03/30, 2001/07/17 | Tested STARFM’s performance on a complex mixture region. | AD; bias; STD | |||
| 3 | Hansen et al. (2008) [24] | Regression and classification tree | Congo Basin | Mainly forests | 98 Landsat 4,5,7; daily MODIS L2G (250 m 500 m); 8-day MODIS L3 TIR; Landsat: 1984–2003 MODIS: 2000–2003 | Used regional/continental MODIS-derived forest cover products to calibrate Landsat data for high spatial resolution mapping of the forest cover in the Congo Basin, with a regression and classification tree analysis. | _____ |
| 4 | Hilker et al. (2009) [21] | STAARCH | West-central Alberta, Canada (116°30′W, 53°9′N) | Mainly forest with herbal and shrub vegetation and patches of water and rocks | 3 L-M pairs; 110 8-day MODIS; (3.15–10.15) 2002–2005 | Presented a STAARCH model, based on an extended STARFM, to detect changes in reflectance and denote disturbance events in a forest landscape with a high level of detail. | The known disturbance validation dataset |
| 5 | Hilker et al. (2009) [53] | STARFM | Central British Columbia, Canada | Mainly coniferous forest with subsidiary herbal and shrub vegetation and patches of water and rocks | 5 L-M pairs; 19 8-d MODIS; 2001/05–2001/10 | Applied STARFM to produce dense time series synthetic Landsat-like data for a mainly coniferous region. | AD; R2; t-test |
| 6 | Zurita-Milla et al. (2009) [27] | Linear mixing model | Central part of the Netherlands (5°54′ 36″ E, 52°11′24″N) | A mixture of heather, woodlands, natural vegetation and shifting sands | 1 L scene: 2003/07/10 7 MERIS scenes: 2003/02/18, 04/16,05/31, 07/14, 08/06, 10/15, 12/08 | Proposed a linear mixing model for a time series of MERIS images and used a high-resolution land-use database to produce synthetic images having the spectral and temporal resolution provided by MERIS, but a Landsat-like spatial resolution. | ERGAS |
| 7 | Chen et al. (2010) [54] | ESTARFM | Qian-Yanzhou, Zheijang, China (115°04′13″ E, 26°44′ 48″N) | Mainly forest with patches of shrub and soil | 7 L scenes; 33 8-day MODIS; 2004/04–2004/11 | Improved the accuracy of regional/global gross primary production (GPP) estimation with a combination of a satellite-based algorithm, flux footprint modelling, and data-model fusion. | RMSE; t-test |
| 8 | Liu and Wang (2010) [55] | DASTARF model | Beijing, China | Winter wheat | 3 L-M pairs; 2009/04/15, 2009/05/17, 2009/06/02 | Proposed a DASTARF model to improve the predictions derived from STARFM, incorporating measured observations and modeling uncertainties using an iteration scheme. Applied this method in a wheat yield estimation. | Error variance |
| 9 | Zhu et al. (2010) [15] | ESTARFM | BOREAS southern study area (104°W, 54°N) | Forest and sparse vegetation | 4 L-M pairs; 2001/05/24, 2001/07/11, 2001/08/12, 2001/09/29 | Tested the newly proposed ESTARFM’s ability to capture frequently changing information and conducted a comparison between STARFM and ESTARFM. | AD; AAD |
| Central Virginia, USA | Forest, bare soil, water, and urban regions | 3 L-M pairs; 2002/01/25, 2002/02/26, 2002/05/17 | Validated the advantages of ESTARFM’s predictions using a heterogeneous region, with comparisons with STARFM. | AD; AAD | |||
| 10 | Meng et al. (2011) [56] | STAVFM | Western Beijing (115°58′ 08″ E, 40°27′57″N) | Farmland, forest, shrub, built-up areas, and water | 10 L-M pairs; Daily MODIS; 2002/02/12 | Improved STARFM with the introduction of time-radius and time-distance weighting for averaging transition images in multi-pairs blending. | R2; AD; AAD |
| 11 | Anderson et al. (2011) [33] | STARFM | Orlando region of southern Florida, USA | Urban with high population, irrigated fields, and wetlands | 2 L-M Pairs; 9 daily-TIR MODIS; 2002/11/12 | Applied STARFM in fusing Landsat TIR with MODIS TIR to get daily evaporation mapping with the ALEXI, which demonstrated that STARFM holds great utility for high-resolution evapotranspiration mapping, and its original design. | Error level |
| 12 | Gaulton et al. (2011) [57] | STAARCH | Rocky Mountains and foothills, Alberta, Canada | Mainly forest with a road network | 8-day MODIS; Landsat TM; Landsat: 2001/07, 2001/10, 2004/06, 2004/08, 2008/07, 2008/09, MODIS: A bi-weekly input from 2001 to 2008; | Applied STARRCH to generate a disturbance sequence representing stand-replacing events over a large area of grizzly bear habitat. | The known disturbance validation dataset |
| 13 | Liu et al. (2011) [58] | STARFM | Miyun County, northeast of Beijing, China | Woodland, arable land, construction land, and water | 1 L-M pair; 9 daily MODIS; 2007/05 | Integrated STARFM into ETWatch to fuse different scales of remote sensing evapotranspiration data. | Bias; STD |
| 14 | Singh (2011) [59] | STARFM | Mawana subdivision of the Meerut district of Uttar Pradesh state, India | Arable land with scattered trees and bushes and non-crops, including the Ganges river | 2 L-M pairs; 10 years 8-day MODIS; 2000–2009 | Applied STARFM in the generation and evaluation of GPP. Conducted a regression analysis of GPP derived from closest observed and synthetic ETM+ during a long time series from 2000 to 2009. | R2; t-test |
| 15 | Watts et al. (2011) [34] | STARFM | North Central Montana, USA | Field crops, including spring and winter wheat and some barley | 5 L-M pairs; 26 daily MODIS; 2009/05–2009/08 | Used synthetic data derived from STARFM to improve the classification accuracy of conservation arable land. Produced a high frequency data series compensating for degraded synthetic spectral values when classifying field-based tillage. | R2; t-test |
| 16 | Coops et al. (2011) [60] | STARFM | Foothills of western Alberta, Canada, along the slopes of the Rocky Mountains | Coniferous and mixed vegetation types | 2 L-M pairs; 32 8-day MODIS; 2009/02–2009/09 | Compared vegetation phenology measures observed from ground-based cameras with those of fused Landsat-like synthetic datasets derived from STARFM, using three key indicators of phenological activities: the start of green-up, the start of senescence, and the length of the growing season. | R2 |
| 17 | Liu and Weng (2011) [35] | STARFM | Los Angeles, California, USA | Mainly urban areas, with flat and hilly terrain and water | 3 ASTER-M pairs; 2007/07–2007/12 | Applied STARFM to fuse ASTER and MODIS to obtain a series of ASTER-like datasets for the derivation of the urban variables NDVI, NDWI, and LST. Quantitatively examined the effects of urban environmental characteristics on West Nile Virus dissemination. | AD |
| 18 | Walker et al. (2012) [61] | STARFM | Central Arizona, USA (34°48.0′N, 112°5.5′W) | Dryland forest, woodland, non-forest, and semi-arid grassland | 6 L-M pairs; 20 daily, 8-day, 16-day MODIS; 2006/04–2006/10 | Used STARFM to produce synthetic imagery over a dry land vegetation study site for tracking phenological changes. | R2; AAD; Max/min differences |
| 19 | Singh (2012) [62] | STARFM | Mawana subdivision of the Meerut district of Uttar Pradesh state, India | Arable land with scattered trees and bushes and non-crops, including the Ganges river | 16 L-M pairs; 46 8-day MODIS; 2002/03–2009/09 | Applied STARFM to generate a series of NDVI datasets from 2002 to 2009. Quantitatively compared the blending results and observations from the predicted residual and temporal residual perspectives. | R2; bias; RMSE |
| 20 | Bhandari et al. (2012) [63] | STARFM | Queensland, Australia | Mainly forest | 38 L-M pairs; 16-day MODIS; 2003/07–2008/04 | Generated a Landsat image time series for every 16 days for a 5-year period to monitor changes in vegetation phenology in Queensland, which demonstrated that STARFM can be used to form a time series of Landsat TM images to study vegetation phenology over a number of years. | R2; AD; STD |
| 21 | Huang and Song (2012) [29] | SPSTFM | Central part of the BOREAS southern study area | Forest and sparse vegetation | 2 L-M pairs; 2001/05/24, 2001/08/12 | Proposed a spatiotemporal fusion algorithm based on sparse representation using both prior and posterior L-M pairs. | AAD; RMSE; VOE; ERGAS; SSIM |
| Shenzhen, China | Urban area | 2 L-M pairs; 2000/11/01, 2004/11/08 | |||||
| 22 | Huang et al. (2013) [36] | STARFM | Beijing, China | Mainly residential regions, with some woodland and cropland | 4 L-M pairs; 2002/02/15, 2002/03/19, 2002/10/13, 2002/11/14 | Proposed a bilateral filtering model based on STARFM to generate high spatiotemporal resolution LST data for urban heat island monitoring. | RMSE; CC; AAD; STD |
| 23 | Song and Huang (2013) [30] | SPFMOL * | Guangzhou, China | Crops, water, and impervious | 1 L-M pair; 2000/09 1 L-M pair; 2000/11/01 | Proposed a spatiotemporal fusion algorithm through one image pair learning. | AAD; RMSE; SSIM |
| Shenzhen, China | Urban area | 1 L-M pair; 2000/11/01 | |||||
| 24 | Fu et al. (2013) [64] | ESTARFM | Saskatoon, Canada (104°W, 54°N) | Forest region, with mainly coniferous forest | 3 L-M pairs; 8-day MODIS; 2001/05/24, 2001/07/11, 2001/08/12 | Proposed a modified version of ESTARFM (mESTARFM) and compared the performance of mESTARFM to that of ESTARFM on three study sites at different time intervals. | R2; RMSE; AAD; p-value |
| Jiangxi, China (115.0577°E, 26.7416°N) | Coniferous forest containing Pinus massoniana, P. elliottii, Cunninghamia lanceolata, and Schima superba | 3 L-M pairs; 8-day MODIS; 2001/10/19, 2002/04/13, 2002/11/07 | |||||
| Quebec, Canada (74.3420°W, 49.6925°N) | Coniferous boreal forest containing Picea mariana and Pinus banksiana | 3 L-M pairs; 8-day MODIS; 2001/05/13, 2005/05/08, 2009/09/08 | |||||
| 25 | Shen et al. (2013) [23] | STARFM | Wuhan, China | Water, built-up areas, arable land, shrubs, and roads | 2 L-M pairs; 2001/05/03, 2001/09/24 | Proposed a spatiotemporal fusion model based on STARFM, considering sensor observation differences between different cover types when calculating the weight function. Validated this model using three sites. | R2; AAD |
| Beijing, China | Mountains, forests, arable lands and built-up areas | 2 L-M pairs; 2001/11/11, 2001/12/13 | |||||
| Qinghai-Tibet Plateau, China | Mountains with ice and snow | 2 L-M pairs; 2001/06/13, 2001/11/04 | |||||
| 26 | Emelyanova et al. (2013) [38] | STARFM; ESTARFM; LIM; GEIFM | Coleambally, New South Wales, Australia (145.0675°E, 34.0034°S) | Irrigated fields, woodland, and dryland agriculture | 17 L-M pairs; 2001/10–2002/05 | Under a framework of partitioning spatial and temporal variance, compared STARFM, ESTARFM, and two simple algorithms on two specific sites. Concluded that ESTARFM did not always produce lower errors than STARFM, STARFM and ESTARFM did not always produce lower errors than simple models, and that land cover spatial and temporal variances were strongly associated with algorithm performance. | RMSE; bias; R2 |
| Gwydir, New South Wales, Australia (149.2815°E, 29.0855°S) | Irrigated fields, woodland, dryland agriculture, and flood areas | 14 L-M pairs; 2004/04–2005/04 | |||||
| 27 | Walker et al. (2014) [65] | STARFM | Central Arizona (34°48.0′N, 112°5.5′W) | A variety of vegetation classes | 5 Landsat TM; 69 8-day MODIS; 2005–2009 | Applied STARFM to produce a time series of Landsat-like images at 30 m resolution for validating dryland vegetation phenology. Examined the differences in the temporal distributions of the peak greenness extracted from the enhanced vegetation index and NDVI using the synthetic images. | five Pearson’s correlation coefficients |
| 28 | Zhang et al. (2014) [66] | ESTARFM/STARFM | Mid-eastern New Orleans, USA | Water bodies, vegetation, wetland, and urban land. | 4 L-M pairs; 2004/11/07, 2005/04/16, 2005/09/07, 2005/10/09 | Applied STARFM and ESTARFM to map the urban flood resulting from the 2005 Hurricane Katrina in New Orleans. Compared the prediction and mapping accuracy of the two models. | RMSE; AD |
| 29 | Weng et al. (2014) [31] | ESTARFM | Los Angeles, California, USA | Water, developed urban, forest, shrub land, herbaceous, planted/cultivated, and wetland | 7 L-M pairs; 2005/06/24, 2005/07/10, 2005/08/27, 2005/09/28, 2005/10/14, 2005/10/30, 2005/11/15 | Proposed a modified STARFM considering annual temperature and urban thermal landscape heterogeneity to generate daily LST data at Landsat resolution by fusing Landsat and MODIS data. | CC; AD; AAD |
| 30 | Jarihani et al. (2014) [39] | STARFM; ESTARFM | Thomson River, Australia (143.20°E, 24.5°S) | Extensive floodplains, and a complex anabranching river system | 20 L-M pairs, 2008/04–2011/10 | Compared two “Index-then-Blend” and “Blend-then-index” approaches to address the issue “what is the order for doing blending and indices calculation?”, and also compared nine remotely sensed indices by using STARFM and ESTARFM. | Mean bias; RMSE; R2 |
| Coleambally, Australia (145.0675°E, 34.0034°S) | Irrigated fields, woodland, and dryland agriculture | 17 L-M pairs; 2001/10–2002/05 | |||||
| Gwydir, Australia (149.2815°E, 29.0855°S) | Irrigated fields, woodland, dryland agriculture, and flood areas | 14 L-M pairs; 2004/04–2005/04 | |||||
| 31 | Michishita et al. (2014) [16] | C-ESTARFM | Poyang Lake Nature Reserve, Jiangxi, China (116°15′E, 29° 00′N) | Wetland vegetation, mudflat, and water bodies | 9 time-series Landsat-5 TM; 18 time-series MODIS; 2004/07–2005/11 | Reflectance of the moderate-resolution image pixels on the target dates can be predicted more accurately by the proposed customized model than the original ESTARFM. | Average absolute difference |
| 32 | Wu et al. (2015) [32] | STITFM | Desert Rock, Nevada, USA (116.02°W, 36.63°N) | Open shrubs | 2 Landsat ETM+: 2002/08/04 2 MOD11A1: 2002/08/04, 2002/08/20 45 GOES10-imager: 2002/08/20 | Proposed a spatiotemporal integrated temperature fusion model (STITFM) for the retrieval of LST data with fine spatial resolution and temporal frequency from multi-scale polar-orbiting and geostationary satellite observations. | RMSE; bias; R2 |
| Evora, Portgal (8.00°W, 38.54°N) | Natural vegetation compounds of dispersed oak and cork trees with open grassland | 1 Landsat TM: 2010/05/20 2 MOD11A1: 2010/05/18, 2010/05/20 89 MSG SEVIRI: 2010/08/18 |
Conflicts of Interest
References
- Price, J.C. How unique are spectral signatures? Remote Sens. Environ. 1994, 49, 181–186. [Google Scholar] [CrossRef]
- Gao, F.; Masek, J.; Schwaller, M.; Hall, F. On the blending of the Landsat and MODIS surface reflectance: Predicting daily Landsat surface reflectance. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2207–2218. [Google Scholar] [CrossRef]
- Brockhaus, J.A.; Khorram, S. A comparison of SPOT and Landsat-TM data for use in conducting inventories of forest resources. Int. J. Remote Sens. 1992, 13, 3035–3043. [Google Scholar] [CrossRef]
- Cohen, W.B.; Goward, S.N. Landsat’s role in ecological applications of remote sensing. BioSciences 2004, 54, 535–545. [Google Scholar] [CrossRef]
- Masek, J.G.; Huang, C.; Wolfe, R.; Cohen, W.; Hall, F.; Kutler, J.; Nelson, P. North American forest disturbance mapped from a decadal Landsat record. Remote Sens. Environ. 2008, 112, 2914–2926. [Google Scholar] [CrossRef]
- Healey, S.P.; Cohen, W.B.; Yang, Z.; Krankina, O.N. Comparison of tasseled cap-based Landsat data structures for use in forest disturbance detection. Remote Sens. Environ. 2005, 97, 301–310. [Google Scholar] [CrossRef]
- Masek, J.G.; Collatz, G.J. Estimating forest carbon fluxes in a disturbed southeastern landscape: Integration of remote sensing, forest inventory, and biogeochemical modeling. J. Geophys. Res. 2006, 111, G01006. [Google Scholar]
- Gong, P.; Wang, J.; Yu, L.; Zhao, Y.; Zhao, Y.; Liang, L.; Niu, Z.; Huang, X.; Fu, H.; Liu, S.; et al. Finer resolution observation and monitoring of global land cover: First mapping results with Landsat TM and ETM+ data. Int. J. Remote Sens. 2012, 34, 2607–2654. [Google Scholar] [CrossRef]
- Zhu, X.; Liu, D. Accurate mapping of forest types using dense seasonal Landsat time-series. ISPRS J. Photogramm. Remote Sens. 2014, 96, 1–11. [Google Scholar] [CrossRef]
- Woodcock, C.E.; Ozdogan, M. Trends in land cover mapping and monitoring. In Land Change Science; Gutman, G., Janetos, A., Justice, C., Moran, E., Mustard, J., Rindfuss, R., Skole, D., Turner, B., II, Cochrane, M., Eds.; Springer Netherlands: New York, NY, USA, 2004; Volume 6, pp. 367–377. [Google Scholar]
- Michishita, R.; Jiang, Z.; Xu, B. Monitoring two decades of urbanization in the Poyang Lake area, China through spectral unmixing. Remote Sens. Environ. 2012, 117, 3–18. [Google Scholar] [CrossRef]
- Ju, J.; Roy, D.P. The availability of cloud-free Landsat ETM+ data over the conterminous United States and globally. Remote Sens. Environ. 2008, 112, 1196–1211. [Google Scholar] [CrossRef]
- Justice, C.O.; Townshend, J.R.G.; Vermote, E.F.; Masuoka, E.; Wolfe, R.E.; Saleous, N.; Roy, D.P.; Morisette, J.T. An overview of MODIS land data processing and product status. Remote Sens. Environ. 2002, 83, 3–15. [Google Scholar] [CrossRef]
- Michishita, R.; Jiang, Z.; Gong, P.; Xu, B. Bi-scale analysis of multi-temporal land cover fractions for wetland vegetation mapping. ISPRS J. Photogramm. Remote Sens. 2012, 72, 1–15. [Google Scholar] [CrossRef]
- Zhu, X.; Chen, J.; Gao, F.; Chen, X.; Masek, J.G. An enhanced spatial and temporal adaptive reflectance fusion model for complex heterogeneous regions. Remote Sens. Environ. 2010, 114, 2610–2623. [Google Scholar] [CrossRef]
- Michishita, R.; Chen, L.; Chen, J.; Zhu, X.; Xu, B. Spatiotemporal reflectance blending in a wetland environment. Int. J. Digit. Earth 2014. [Google Scholar] [CrossRef]
- Huang, B.; Zhang, H.; Song, H.; Wang, J.; Song, C. Unified fusion of remote-sensing imagery: Generating simultaneously high-resolution synthetic spatial-temporal-spectral earth observations. Remote Sens. Lett. 2013, 4, 561–569. [Google Scholar] [CrossRef]
- Nunez, J.; Otazu, X.; Fors, O.; Prades, A.; Pala, V.; Arbiol, R. Multiresolution-based image fusion with additive wavelet decomposition. IEEE Trans. Geosci. Remote Sens. 1999, 37, 1204–1211. [Google Scholar] [CrossRef]
- Kauth, R.; Thomas, G. The tasselled cap—A graphic description of the spectral-temporal development of agricultural crops as seen by Landsat. In Proceedings of the Symposium on Machine Processing of Remotely Sensed Data, West Lafayette, IN, USA, 29 June–1 July 1976; pp. 4B-41–44B-51.
- Acerbi-Junior, F.W.; Clevers, J.G.P.W.; Schaepman, M.E. The assessment of multi-sensor image fusion using wavelet transforms for mapping the Brazilian savanna. Int. J. Appl. Earth Obs. 2006, 8, 278–288. [Google Scholar] [CrossRef]
- Hilker, T.; Wulder, M.A.; Coops, N.C.; Linke, J.; McDermid, G.; Masek, J.G.; Gao, F.; White, J.C. A new data fusion model for high spatial- and temporal-resolution mapping of forest disturbance based on Landsat and MODIS. Remote Sens. Environ. 2009, 113, 1613–1627. [Google Scholar] [CrossRef]
- Weng, Q.; Blaschke, T.; Carlson, T.; Dheeravath, V.; Mountrakis, G.; Gao, F.; Gitelson, A.A.; Glenn, E.P.; Gong, P.; Gray, J.M.; et al. Advances in Environmental Remote Sensing Sensors, Algorithms, and Applications; Taylor & Francis/CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Shen, H.; Wu, P.; Liu, Y.; Ai, T.; Wang, Y.; Liu, X. A spatial and temporal reflectance fusion model considering sensor observation differences. Int. J. Remote Sens. 2013, 34, 4367–4383. [Google Scholar] [CrossRef]
- Hansen, M.C.; Roy, D.P.; Lindquist, E.; Adusei, B.; Justice, C.O.; Altstatt, A. A method for integrating MODIS and Landsat data for systematic monitoring of forest cover and change in the Congo basin. Remote Sens. Environ. 2008, 112, 2495–2513. [Google Scholar] [CrossRef]
- Roy, D.P.; Ju, J.; Lewis, P.; Schaaf, C.; Gao, F.; Hansen, M.; Lindquist, E. Multi-temporal MODIS-Landsat data fusion for relative radiometric normalization, gap filling, and prediction of Landsat data. Remote Sens. Environ. 2008, 112, 3112–3130. [Google Scholar] [CrossRef]
- Zurita-Milla, R.; Clevers, J.G.P.W.; Schaepman, M.E. Unmixing-based Landsat TM and MERIS FR data fusion. IEEE Geosci. Remote Sens. Lett. 2008, 5, 453–457. [Google Scholar] [CrossRef]
- Zurita-Milla, R.; Kaiser, G.; Clevers, J.G.P.W.; Schneider, W.; Schaepman, M.E. Downscaling time series of MERIS full resolution data to monitor vegetation seasonal dynamics. Remote Sens. Environ. 2009, 113, 1874–1885. [Google Scholar] [CrossRef]
- Yang, J.; Wright, J.; Huang, T.S.; Ma, Y. Image super-resolution via sparse representation. IEEE Trans. Image Process. 2010, 19, 2861–2873. [Google Scholar] [CrossRef] [PubMed]
- Huang, B.; Song, H. Spatiotemporal reflectance fusion via sparse representation. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3707–3716. [Google Scholar] [CrossRef]
- Song, H.; Huang, B. Spatiotemporal satellite image fusion through one-pair image learning. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1883–1896. [Google Scholar] [CrossRef]
- Weng, Q.; Fu, P.; Gao, F. Generating daily land surface temperature at Landsat resolution by fusing Landsat and MODIS data. Remote Sens. Environ. 2014, 145, 55–67. [Google Scholar] [CrossRef]
- Wu, P.; Shen, H.; Zhang, L.; Göttsche, F.-M. Integrated fusion of multi-scale polar-orbiting and geostationary satellite observations for the mapping of high spatial and temporal resolution land surface temperature. Remote Sens. Environ. 2015, 156, 169–181. [Google Scholar] [CrossRef]
- Anderson, M.C.; Kustas, W.P.; Norman, J.M.; Hain, C.R.; Mecikalski, J.R.; Schultz, L.; González-Dugo, M.P.; Cammalleri, C.; D’Urso, G.; Pimstein, A.; et al. Mapping daily evapotranspiration at field to continental scales using geostationary and polar orbiting satellite imagery. Hydrol. Earth Syst. Sci. 2011, 15, 223–239. [Google Scholar] [CrossRef] [Green Version]
- Watts, J.D.; Powell, S.L.; Lawrence, R.L.; Hilker, T. Improved classification of conservation tillage adoption using high temporal and synthetic satellite imagery. Remote Sens. Environ. 2011, 115, 66–75. [Google Scholar] [CrossRef]
- Liu, H.; Weng, Q. Enhancing temporal resolution of satellite imagery for public health studies: A case study of west nile virus outbreak in Los Angeles in 2007. Remote Sens. Environ. 2012, 117, 57–71. [Google Scholar] [CrossRef]
- Huang, B.; Wang, J.; Song, H.; Fu, D.; Wong, K. Generating high spatiotemporal resolution land surface temperature for urban heat island monitoring. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1011–1015. [Google Scholar] [CrossRef]
- Zhou, W.; Bovik, A.C. A universal image quality index. IEEE Signal Process. Lett. 2002, 9, 81–84. [Google Scholar] [CrossRef]
- Emelyanova, I.V.; McVicar, T.R.; van Niel, T.G.; Li, L.; van Dijk, A.I.J.M. Assessing the accuracy of blending Landsat-MODIS surface reflectances in two landscapes with contrasting spatial and temporal dynamics: A framework for algorithm selection. Remote Sens. Environ. 2013, 133, 193–209. [Google Scholar] [CrossRef]
- Jarihani, A.; McVicar, T.; van Niel, T.; Emelyanova, I.; Callow, J.; Johansen, K. Blending Landsat and MODIS data to generate multispectral indices: A comparison of “index-then-blend” and “blend-then-index” approaches. Remote Sens. 2014, 6, 9213–9238. [Google Scholar] [CrossRef] [Green Version]
- Chen, B.; Xu, B. A novel method for measuring landscape heterogeneity changes. IEEE Geosci. Remote Sens. Lett. 2015, 12, 567–571. [Google Scholar] [CrossRef]
- Van Niel, T.G.; McVicar, T.R. A simple method to improve field-level rice identification: Toward operational monitoring with satellite remote sensing. Aust. J. Exp. Agric. 2003, 43, 379–395. [Google Scholar]
- Van Niel, T.G.; McVicar, T.R. Determining temporal windows for crop discrimination with remote sensing: A case study in south-eastern Australia. Comput. Electron. Agric. 2004, 45, 379–395. [Google Scholar]
- Berk, A.; Anderson, G.P.; Bernstein, L.S.; Acharya, P.K.; Dothe, H.; Matthew, M.W.; Adler-Golden, S.M.; Chetwynd, J.J.H.; Richtsmeier, S.C.; Pukall, B.; et al. Modtran4 radiative transfer modeling for atmospheric correction. Proc. SPIE 1999, 3756, 348–353. [Google Scholar]
- Crist, E.P.; Cicone, R.C. Comparisons of the dimensionality and features of simulated Landsat-4 MSS and TM data. Remote Sens. Environ. 1984, 14, 235–246. [Google Scholar] [CrossRef]
- Guo, J.-G.; Penolope, V.; Cao, C.-L.; Jürg, U.; Zhu, H.-Q.; Daniel, A.; Zhu, R.; He, Z.-Y.; Li, D.; Hu, F. A geographic information and remote sensing based model for prediction of habitats in the Poyang Lake area, China. Acta Trop. 2005, 2–3, 213–222. [Google Scholar] [CrossRef]
- Anderson, G.P.; Felde, G.W.; Hoke, M.L.; Ratkowski, A.J.; Cooley, T.W.; Chetwynd, J.J.H.; Gardner, J.A.; Adler-Golden, S.M.; Matthew, M.W.; Berk, A.; et al. Modtran4-based atmospheric correction algorithm: Flaash (fast line-of-sight atmospheric analysis of spectral hypercubes). Proc. SPIE 2002, 4725, 65–71. [Google Scholar]
- Vermote, E.F.; Tanre, D.; Deuze, J.L.; Herman, M.; Morcette, J.J. Second simulation of the satellite signal in the solar spectrum, 6s: An overview. IEEE Trans. Geosci. Remote Sens. 1997, 35, 675–686. [Google Scholar] [CrossRef]
- Chen, B.; Xu, B. An improved spatial and temporal adaptive fusion model for predicting dense high-resolution NDVI products. ISPRS J. Photogramm. Remote Sens. 2015. submitted. [Google Scholar]
- Aharon, M.; Elad, M.; Bruckstein, A. K-svd: An algorithm for designing overcomplete dictionaries for sparse representation. IEEE Trans. Signal Process. 2006, 54, 4311–4322. [Google Scholar] [CrossRef]
- Gupta, H.V.; Kling, H.; Yilmaz, K.K.; Martinez, G.F. Decomposition of the mean squared error and nse performance criteria: Implications for improving hydrological modelling. J. Hydrol. 2009, 377, 80–91. [Google Scholar] [CrossRef]
- Sun, F.; Roderick, M.L.; Farquhar, G.D.; Lim, W.; Zhang, Y.; Bennett, N.; Roxburgh, S.H. Partitioning the variance between space and time. Geophys. Res. Lett. 2010, 37, L12704. [Google Scholar]
- Huang, B.; Song, H.; Cui, H.; Peng, J.; Xu, Z. Spatial and spectral image fusion using sparse matrix factorization. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1693–1704. [Google Scholar] [CrossRef]
- Hilker, T.; Wulder, M.A.; Coops, N.C.; Seitz, N.; White, J.C.; Gao, F.; Masek, J.G.; Stenhouse, G. Generation of dense time series synthetic Landsat data through data blending with MODIS using a spatial and temporal adaptive reflectance fusion model. Remote Sens. Environ. 2009, 113, 1988–1999. [Google Scholar] [CrossRef]
- Chen, B.; Ge, Q.; Fu, D.; Yu, G.; Sun, X.; Wang, S.; Wang, H. A data-model fusion approach for upscaling gross ecosystem productivity to the landscape scale based on remote sensing and flux footprint modelling. Biogeosciences 2010, 7, 2943–2958. [Google Scholar] [CrossRef]
- Liu, F.; Wang, Z. Synthetic Landsat data through data assimilation for winter wheat yield estimation. In Proceedings of the 18th International Conference on Geoinformatics, Beijing, China, 18–20 June 2010; pp. 1–6.
- Meng, J.; Wu, B.; Du, X.; Niu, L.; Zhang, F. Method to construct high spatial and temporal resolution NDVI dataset—STAVFM. J. Remote Sens. 2011, 15, 44–59. [Google Scholar]
- Gaulton, R.; Hilker, T.; Wulder, M.A.; Coops, N.C.; Stenhouse, G. Characterizing stand-replacing disturbance in western Alberta grizzly bear habitat, using a satellite-derived high temporal and spatial resolution change sequence. For. Eco-Manag. 2011, 261, 865–877. [Google Scholar] [CrossRef]
- Liu, S.; Xiong, J.; Wu, B. Etwatch: A method of multi-resolution ET data fusion. J. Remote Sens. 2011, 15, 255–269. [Google Scholar]
- Singh, D. Generation and evaluation of gross primary productivity using Landsat data through blending with MODIS data. Int. J. Appl. Earth Obs. 2011, 13, 59–69. [Google Scholar] [CrossRef]
- Coops, N.C.; Hilker, T.; Bater, C.W.; Wulder, M.A.; Nielsen, S.E.; McDermid, G.; Stenhouse, G. Linking ground-based to satellite-derived phenological metrics in support of habitat assessment. Remote Sens. Lett. 2011, 3, 191–200. [Google Scholar] [CrossRef]
- Walker, J.J.; de Beurs, K.M.; Wynne, R.H.; Gao, F. Evaluation of Landsat and MODIS data fusion products for analysis of dryland forest phenology. Remote Sens. Environ. 2012, 117, 381–393. [Google Scholar] [CrossRef]
- Singh, D. Evaluation of long-term NDVI time series derived from Landsat data through blending with MODIS data. Atmosfera 2012, 25, 43–63. [Google Scholar]
- Bhandari, S.; Phinn, S.; Gill, T. Preparing Landsat image time series (LITS) for monitoring changes in vegetation phenology in Queensland, Australia. Remote Sens. 2012, 4, 1856–1886. [Google Scholar] [CrossRef]
- Fu, D.; Chen, B.; Wang, J.; Zhu, X.; Hilker, T. An improved image fusion approach based on enhanced spatial and temporal the adaptive reflectance fusion model. Remote Sens. 2013, 5, 6346–6360. [Google Scholar] [CrossRef]
- Walker, J.J.; de Beurs, K.M.; Wynne, R.H. Dryland vegetation phenology across an elevation gradient in Arizona, USA, investigated with fused MODIS and Landsat data. Remote Sens. Environ. 2014, 144, 85–97. [Google Scholar] [CrossRef]
- Zhang, F.; Zhu, X.; Liu, D. Blending MODIS and Landsat images for urban flood mapping. Int. J. Remote Sens. 2014, 35, 3237–3253. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, B.; Huang, B.; Xu, B. Comparison of Spatiotemporal Fusion Models: A Review. Remote Sens. 2015, 7, 1798-1835. https://doi.org/10.3390/rs70201798
Chen B, Huang B, Xu B. Comparison of Spatiotemporal Fusion Models: A Review. Remote Sensing. 2015; 7(2):1798-1835. https://doi.org/10.3390/rs70201798
Chicago/Turabian StyleChen, Bin, Bo Huang, and Bing Xu. 2015. "Comparison of Spatiotemporal Fusion Models: A Review" Remote Sensing 7, no. 2: 1798-1835. https://doi.org/10.3390/rs70201798
APA StyleChen, B., Huang, B., & Xu, B. (2015). Comparison of Spatiotemporal Fusion Models: A Review. Remote Sensing, 7(2), 1798-1835. https://doi.org/10.3390/rs70201798