
Automated 3D Scene Reconstruction from Open Geospatial Data Sources: Airborne Laser Scanning and a 2D Topographic Database



 ,
,
Abstract
:
1. Introduction

2. Related Work
3. Data Sources
3.1. Airborne Laser Scanning
3.2. Topographic Database
3.3. Orthophoto
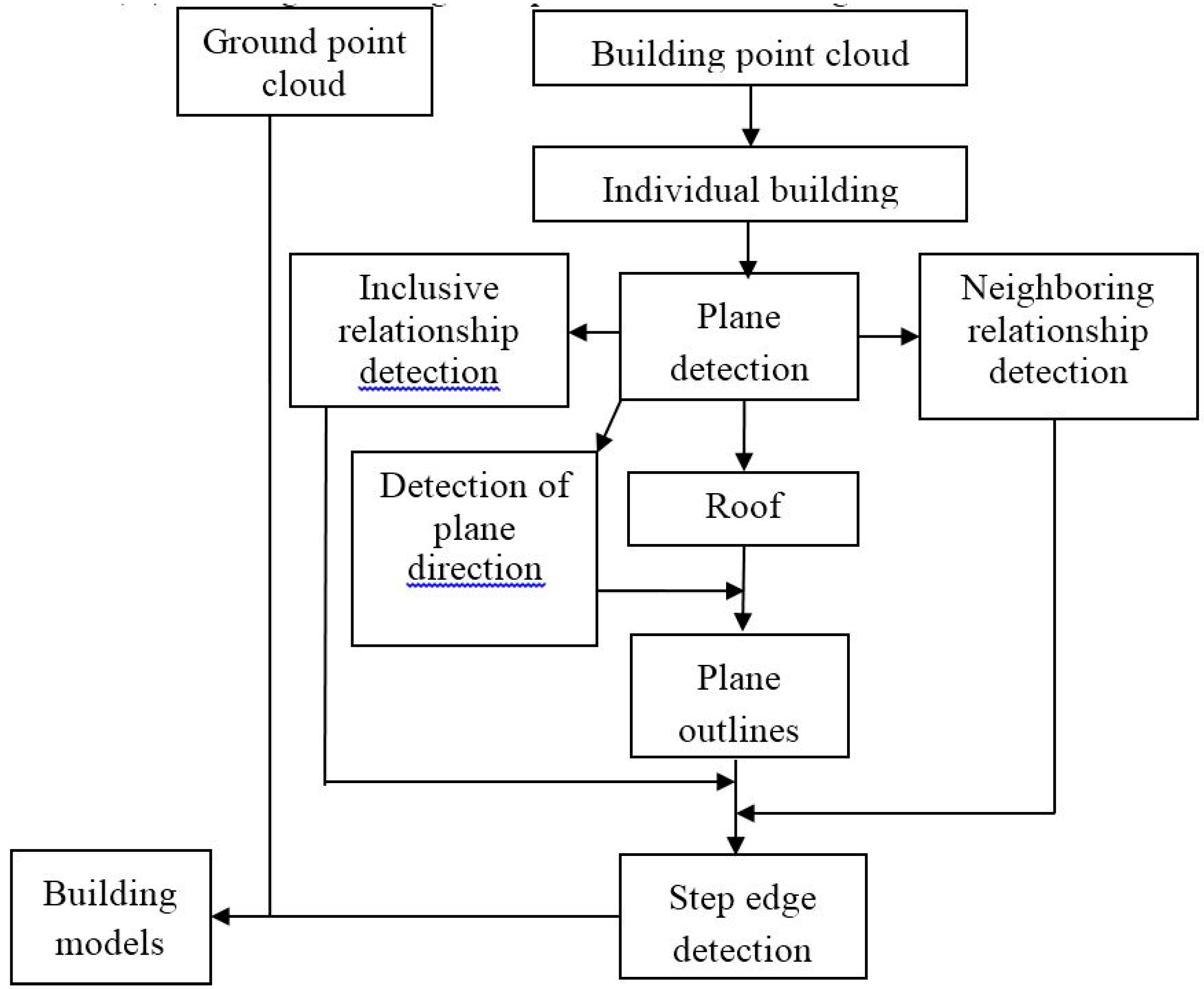
4. Developed Methods for 3D Building Reconstruction

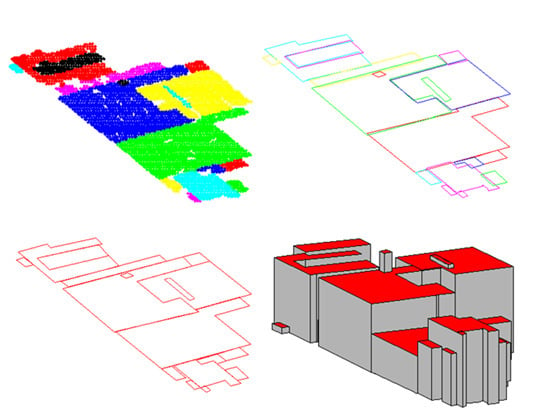
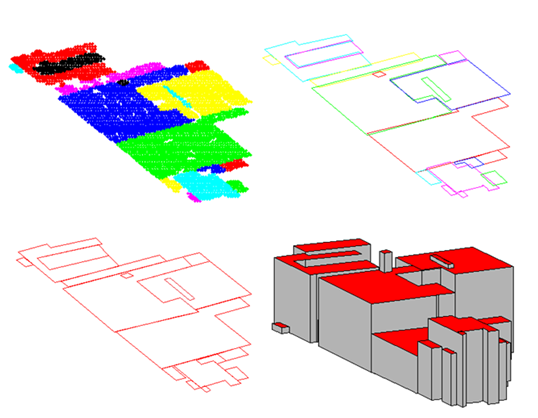
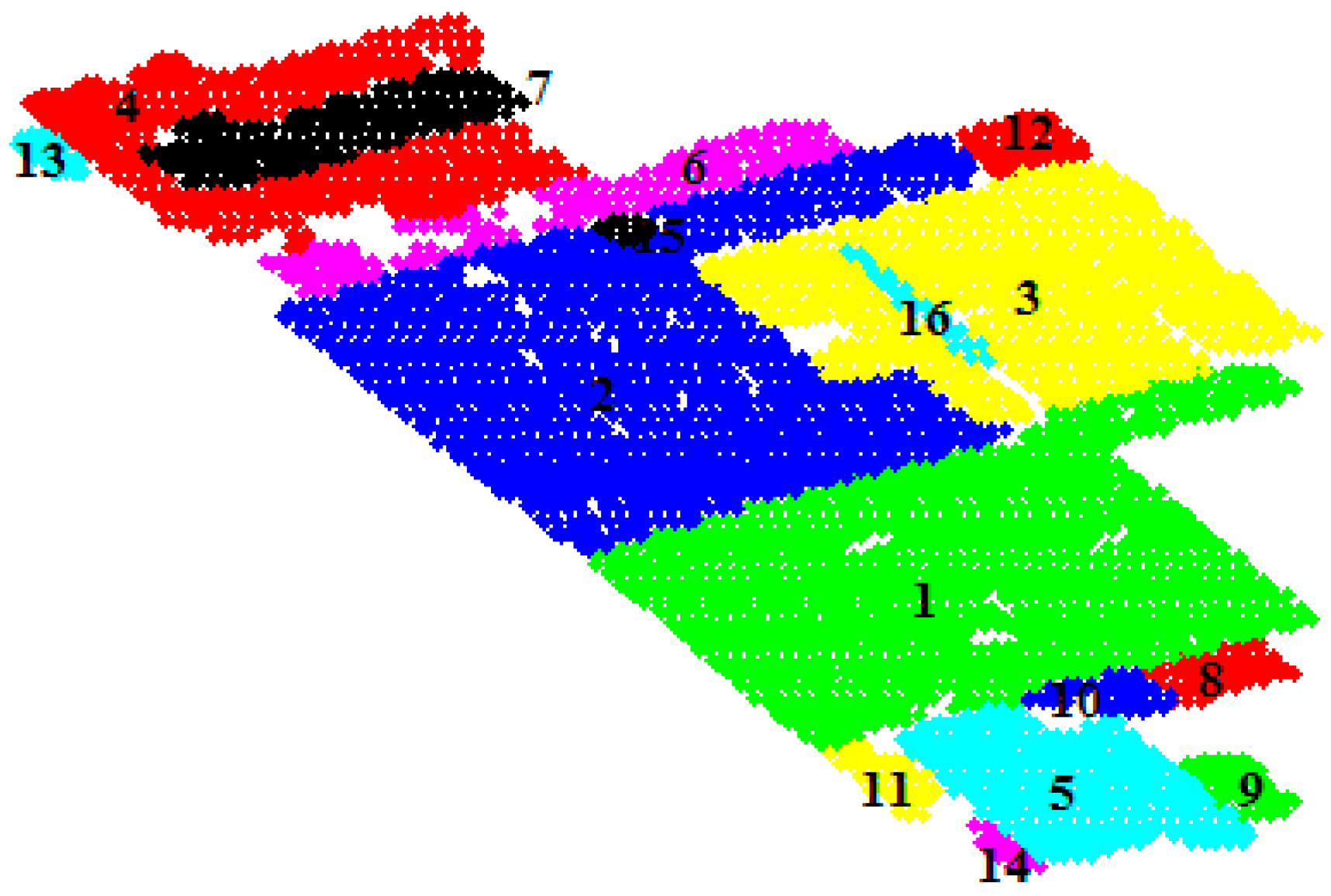
4.1. Roof Patch Segmentation


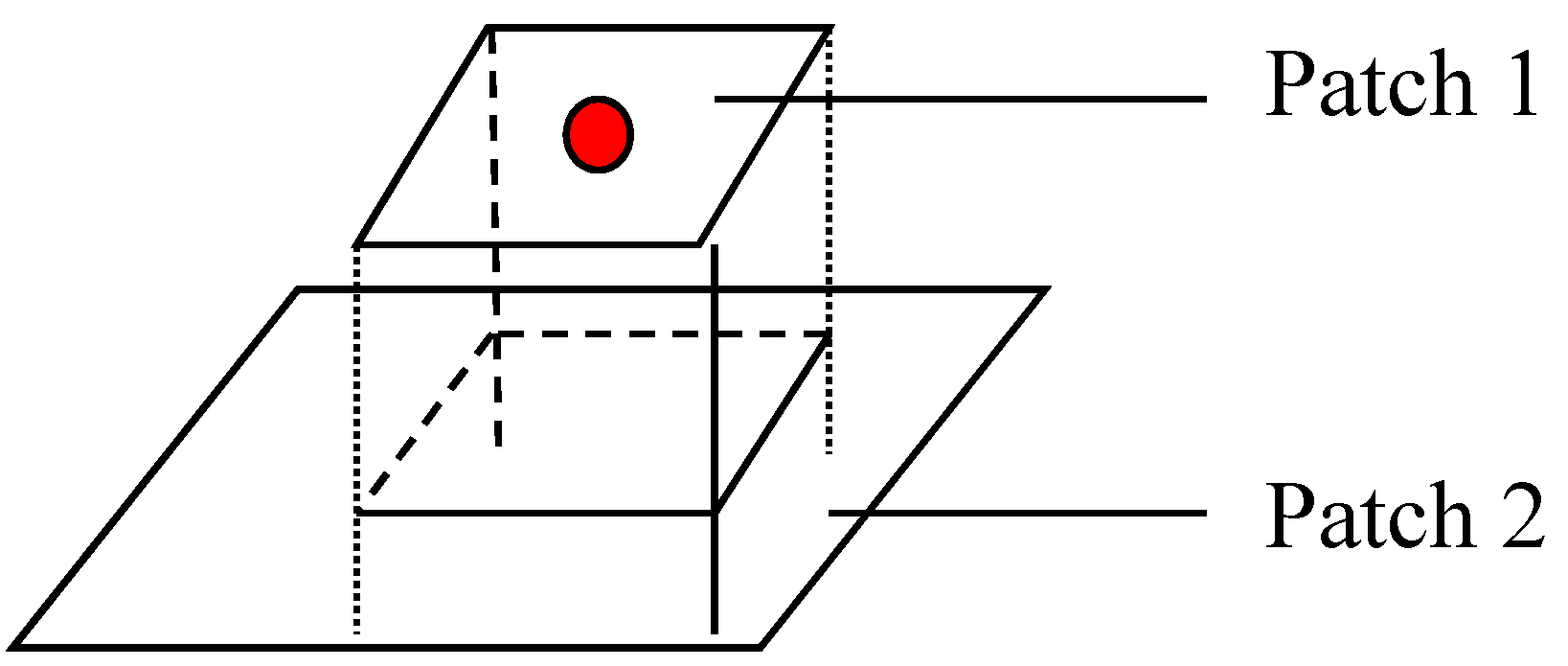
4.2. Building Roof Data Structure Establishment



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plane (Number of Points >10) | Number of Points | Plane and Building Direction (Consistent = 1) | Plane Normal Angle (degree) | Inclusive Relationship | Neighboring Relations | The Height of the Centroid of the Plane (m) |
|---|---|---|---|---|---|---|
| P1 | 1652 | 1 | 1.0896 | 0 | P2, P3, P5, P8, P10, P11 | 14.87 |
| P2 | 1550 | 1 | −5.5742 | 0 | P1, P3, P6, P12, P15 | 22.2 |
| P3 | 976 | 1 | 3.3197 | 0 | P2, P1, P12, P16 | 26.09 |
| P4 | 648 | 1 | 3.8889 | 0 | P6, P7, P13 | 22.23 |
| P5 | 386 | 1 | 3.7306 | 0 | P1, P9, P10, P11, P14 | 22.91 |
| P6 | 243 | 1 | −8.8889 | 0 | P2, P4, P5 | 11.35 |
| P7 | 237 | 1 | 7.5949 | P4 | 25.65 | |
| P8 | 74 | 1 | 14.5946 | 0 | P1, P10 | 11.66 |
| P9 | 56 | 1 | −12.8571 | 0 | P5 | 19.69 |
| P10 | 48 | 1 | −7.5 | 0 | P1, P5, P8 | 19.60 |
| P11 | 53 | 1 | 6.7925 | 0 | P1, P5 | 18.36 |
| P12 | 66 | 1 | 21.8182 | 0 | P2, P3 | 15.49 |
| P13 | 51 | 1 | −14.1176 | 0 | P4 | 7.1 |
| P14 | 19 | 1 | −18.9474 | 0 | P5 | 18.2 |
| P15 | 14 | 1 | −25.7143 | P2, P6 | 26.81 | |
| P16 | 30 | 1 | 12 | P3 | 27.24 |
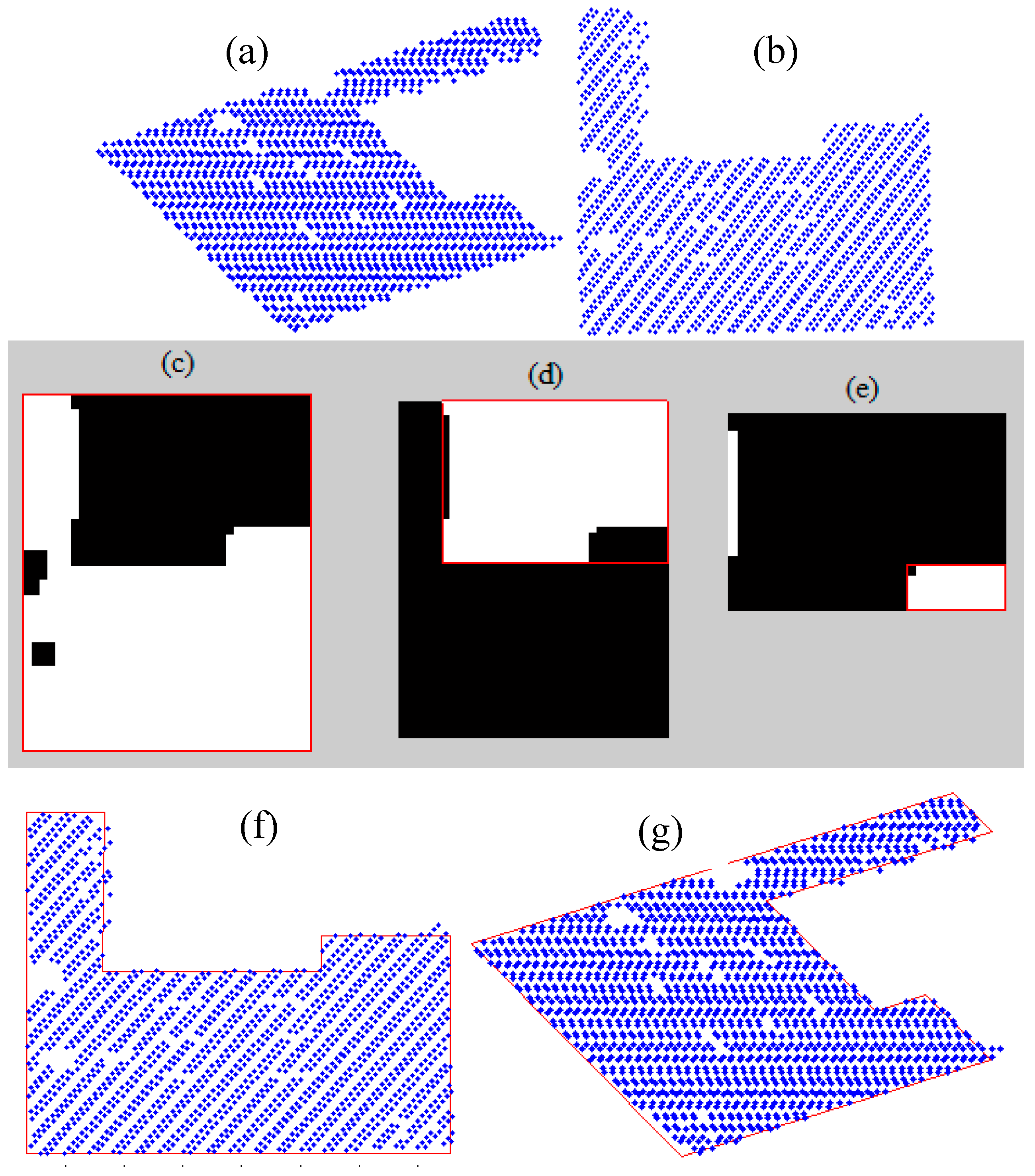
4.3. Extraction of Roof Patch Outlines


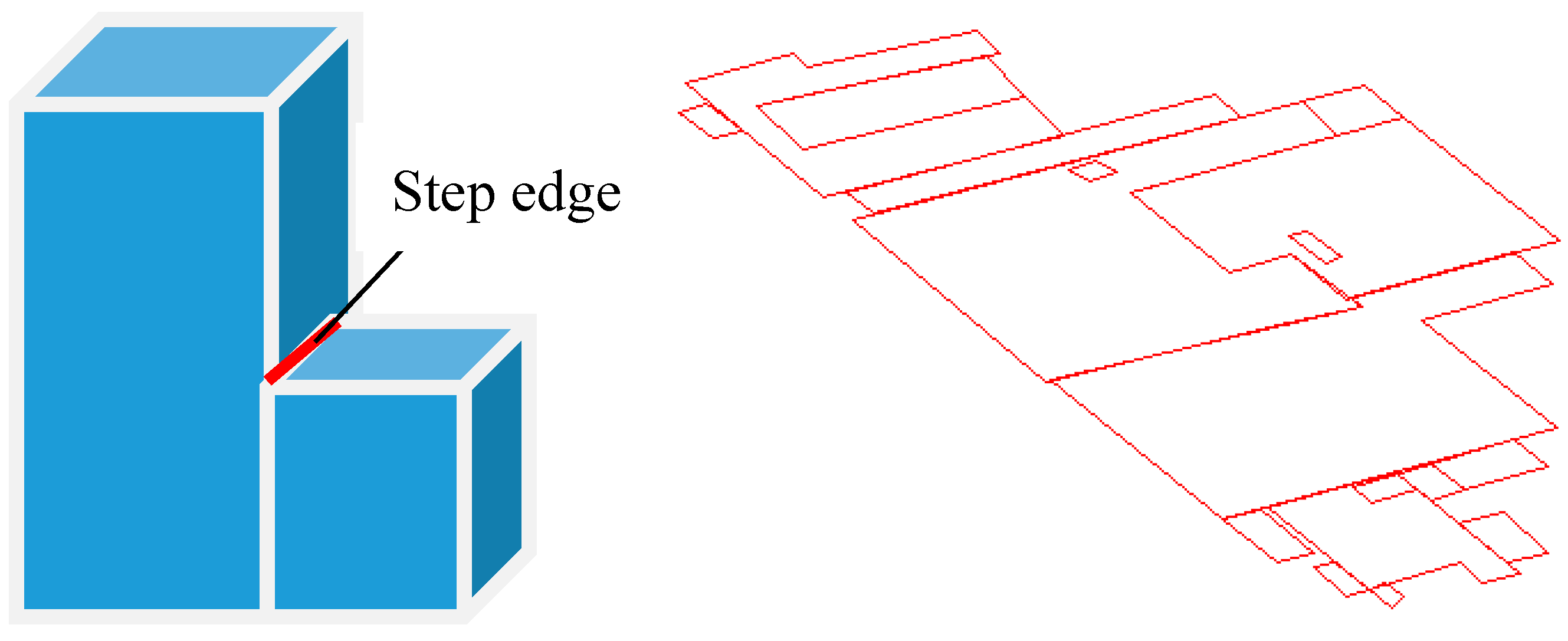
4.4. Acquisition and Adjustment of Step Edges

4.5. Building Base Height Acquisition and Model Generation

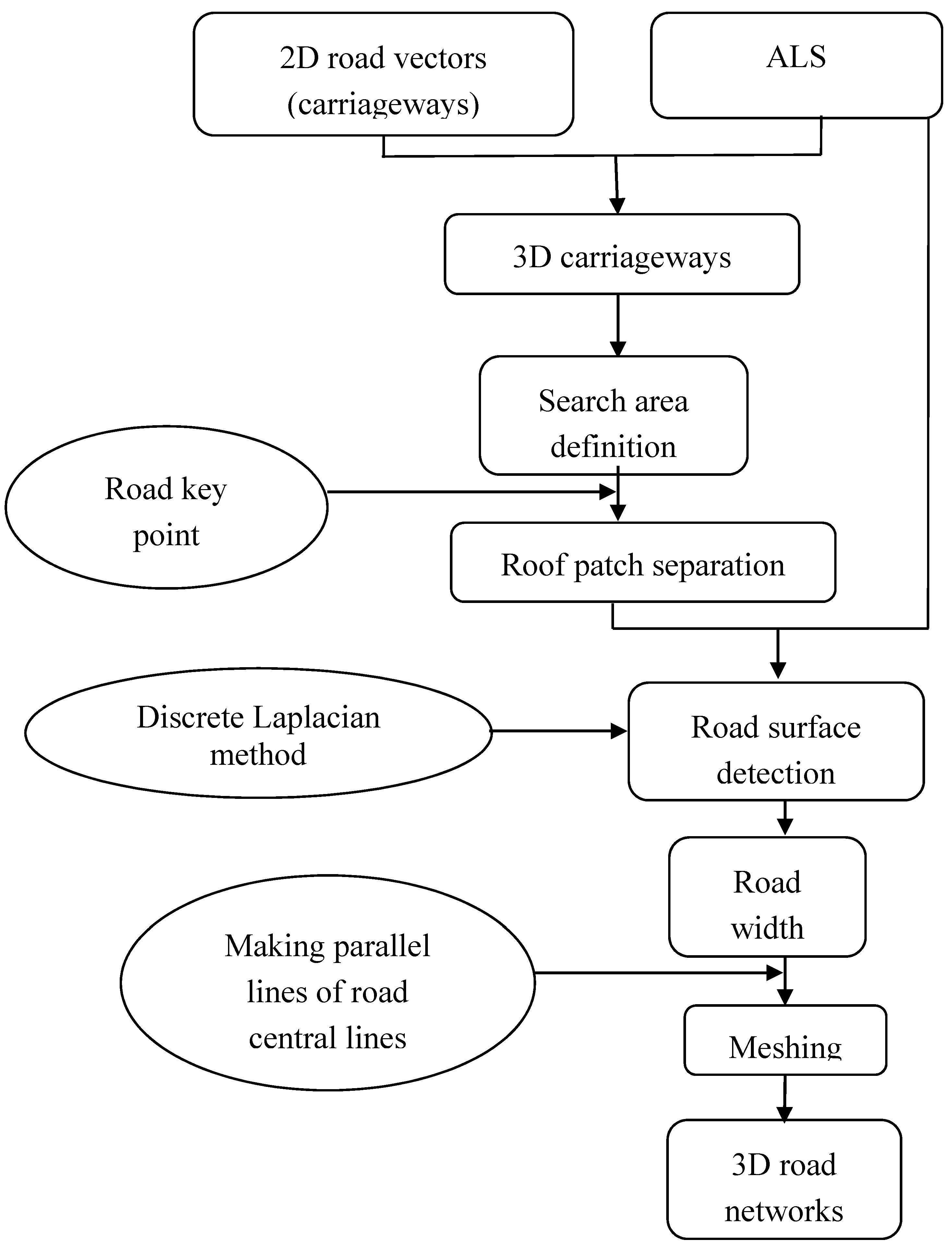
5. Developed Methods for 3D Road Detection and Reconstruction
| Class | Legend | Width (m) |
|---|---|---|
| 12111 | Motorway | 10–11 |
| 12112 | Highway | 8–10 |
| 12121 | High-capacity urban roads | 6.5–8 |
| 12122 | Main suburban roads | 5–6.5 |
| 12131 | Suburban roads and entry | 4–5 |
| 12132 | Small suburban roads with gravel surface | 3–4 |
| 12141 | Roadway | ≤3 |
| 12313 | Pedestrian and bicycle way with gravel surface | ≤2 |
| 12314 | Pedestrian and bicycle way with asphalt surface | ≤2 |
| 12316 | Footpath | 1 |
| 14111 | Electrified railway | 1.52 m |

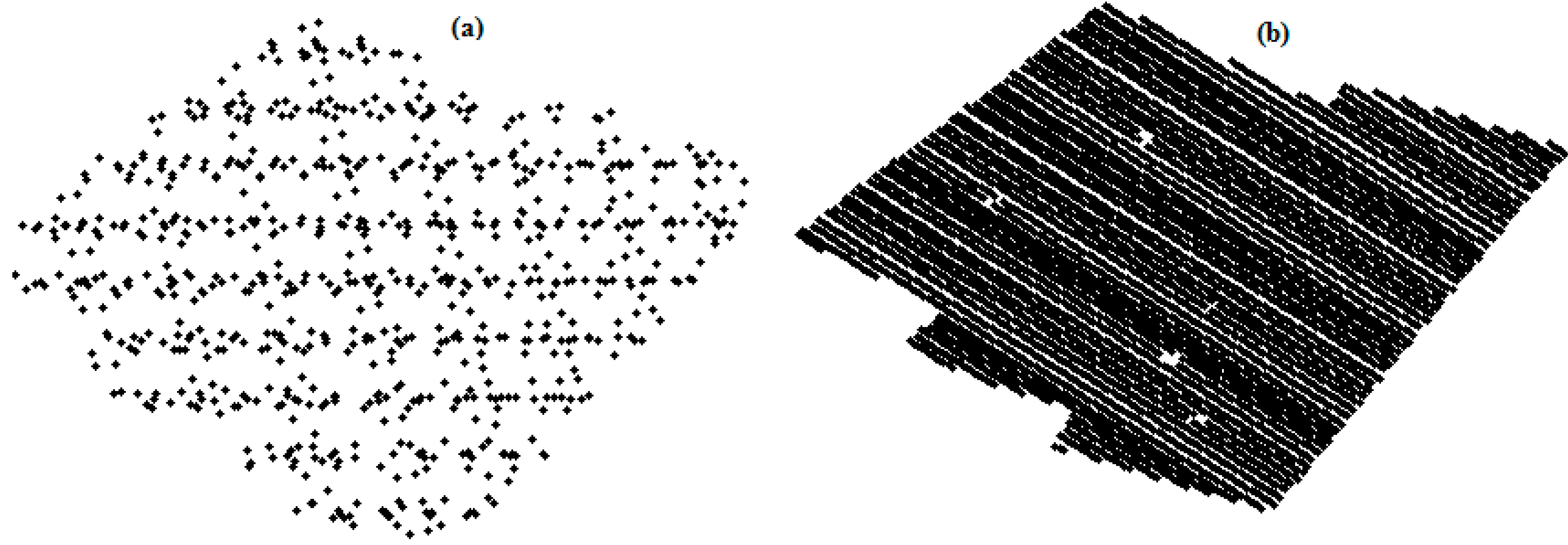
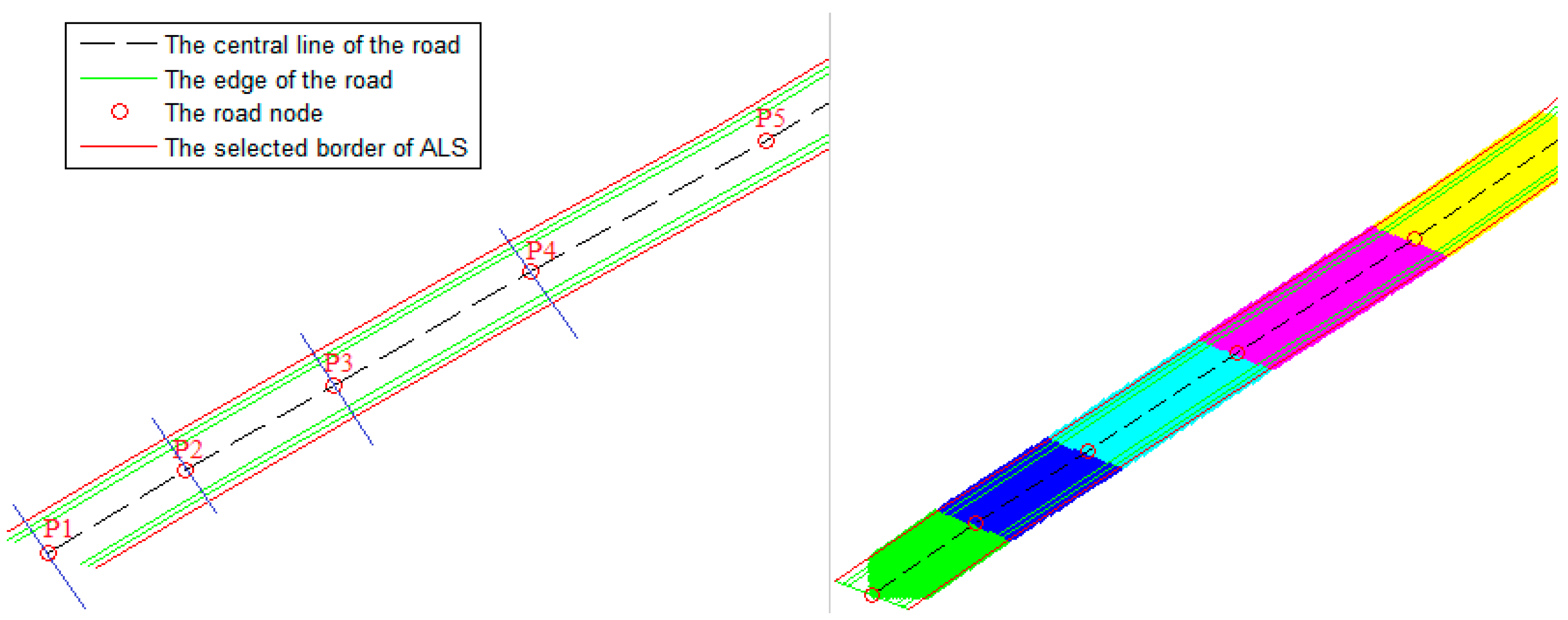
5.1. Obtaining the Elevations of 2D Central Lines of the Roads or Carriageways from ALS Ground Points

5.2. Determination of the ALS Search Area for Detecting the Road Edges


5.3. Road Patch Separation

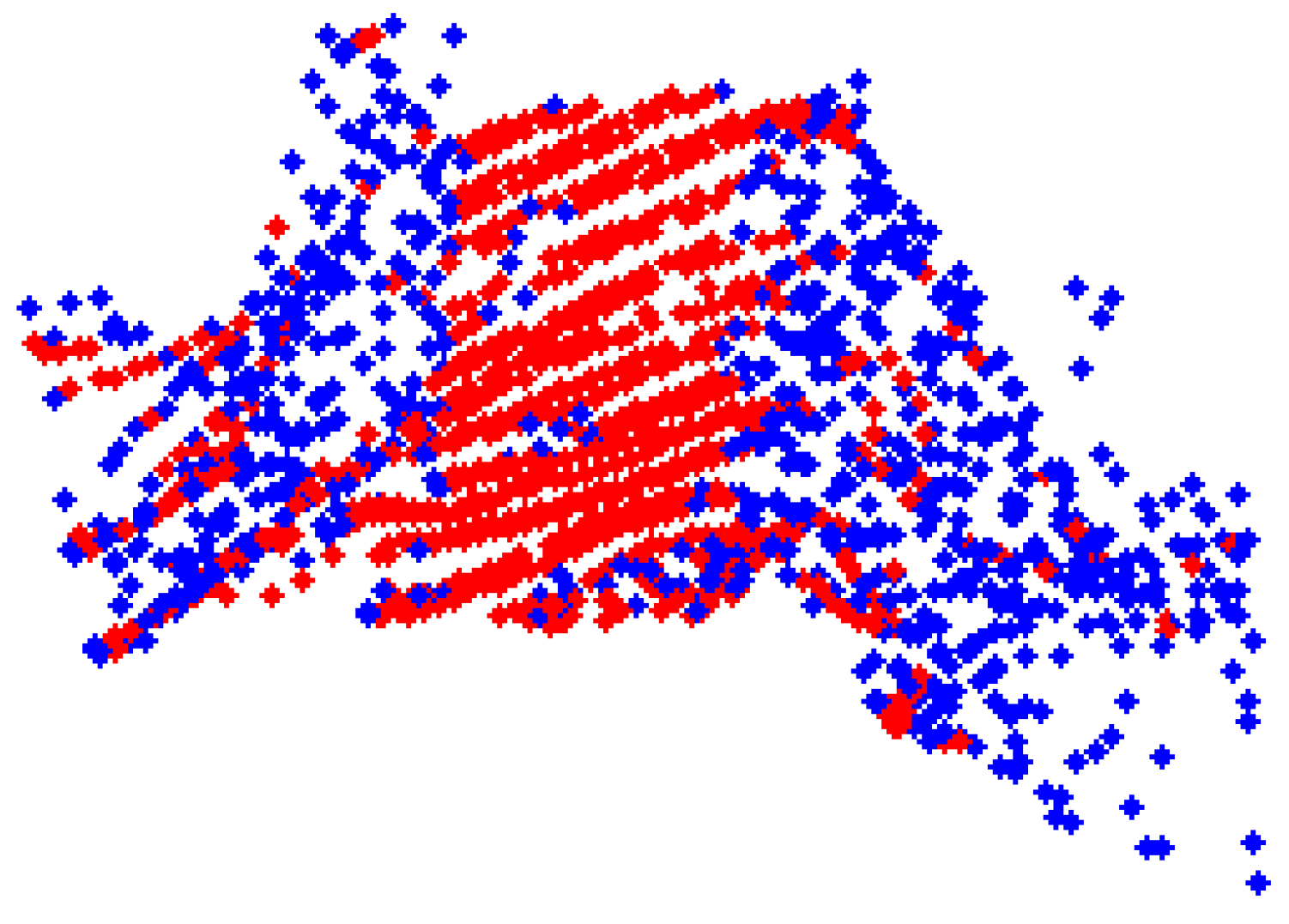
5.4. Application of the Discrete Laplacian Method for Road Detection



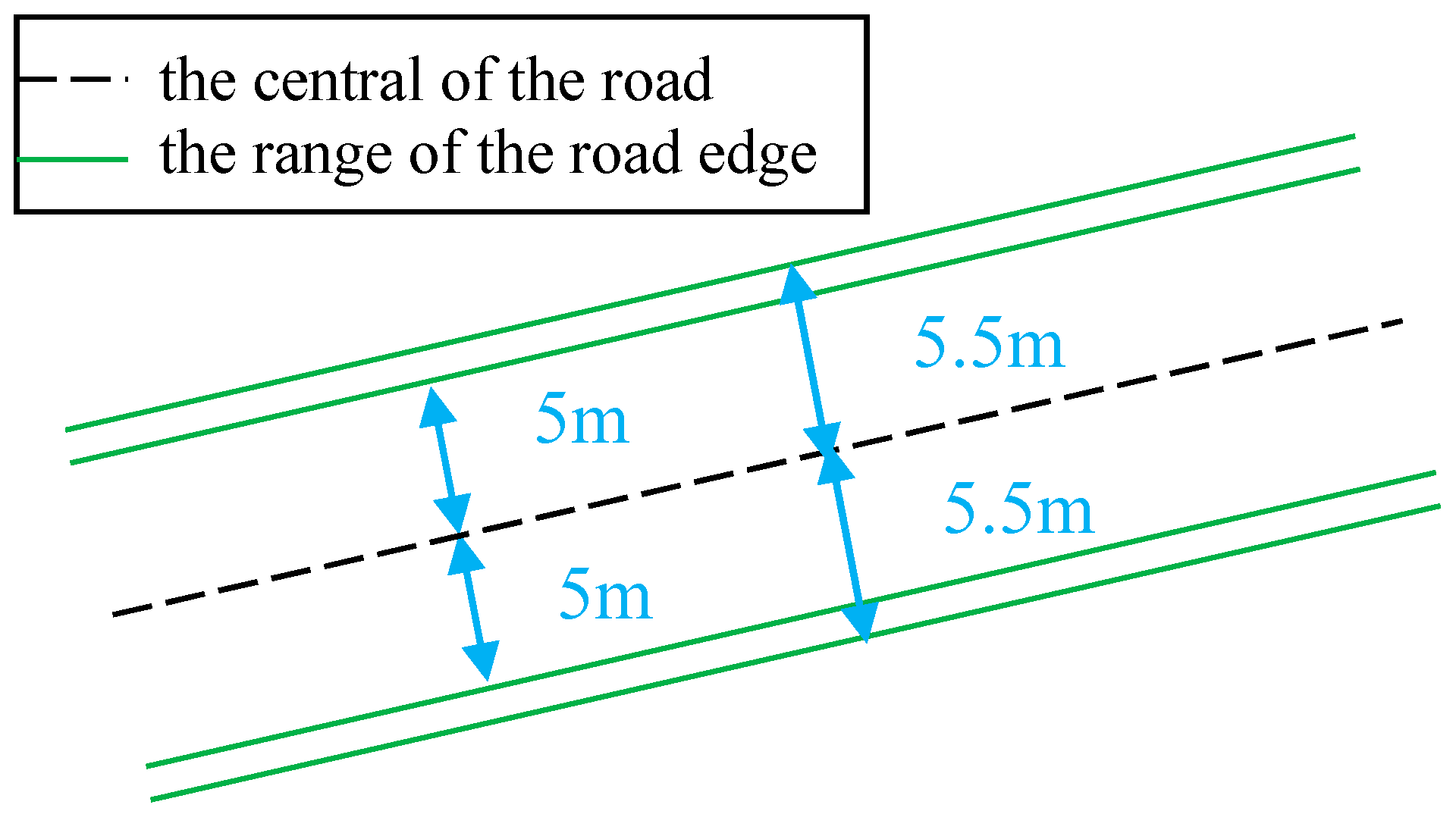
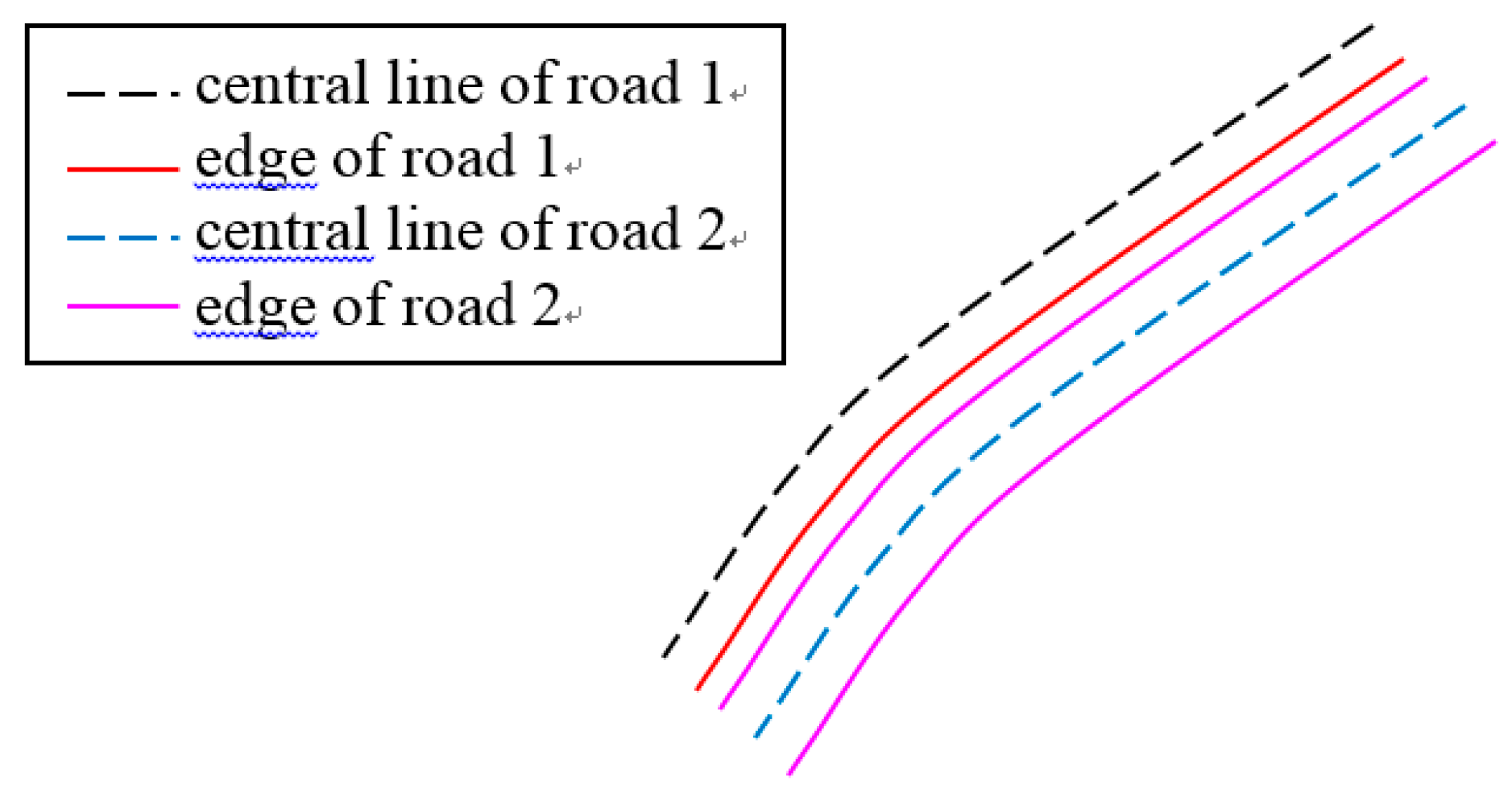
5.5. Calculation of the Road Width and Estimation of the Road Edges

5.6. Meshing
6. Experimental Results and Analysis
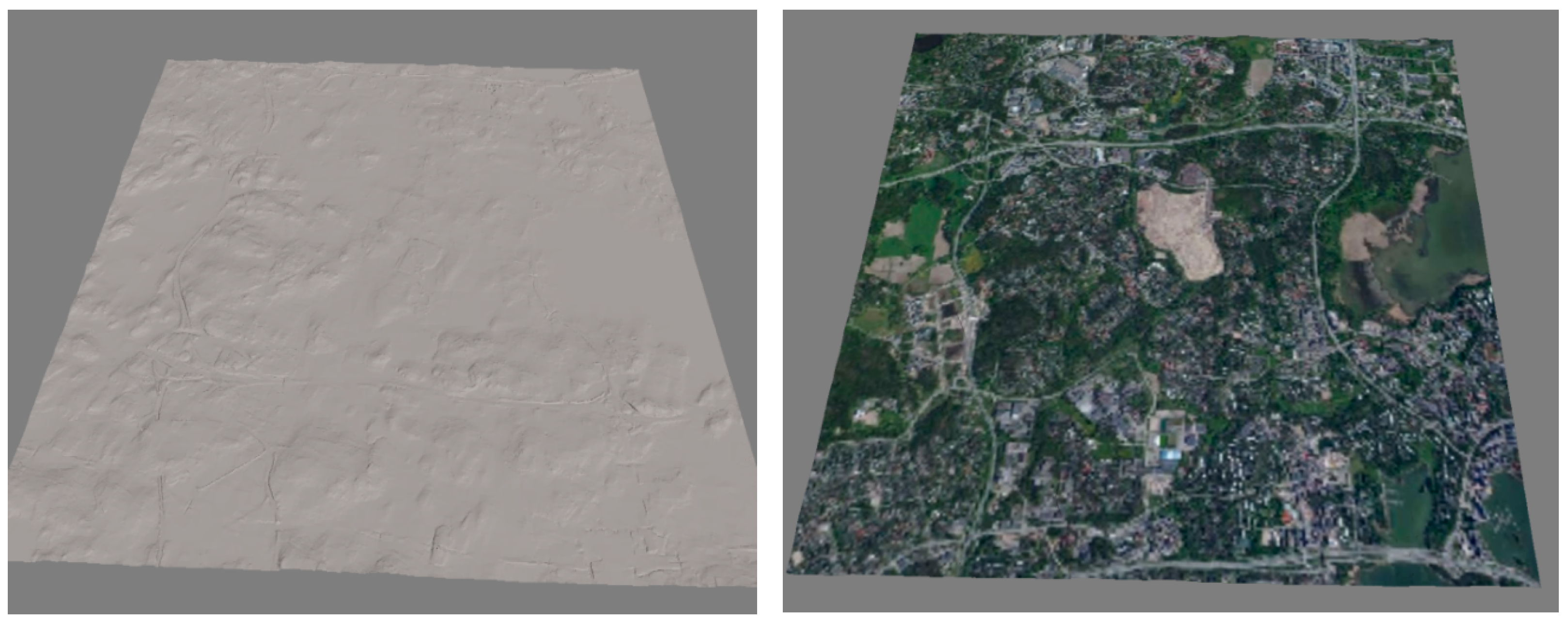
6.1. 3D Terrain Model

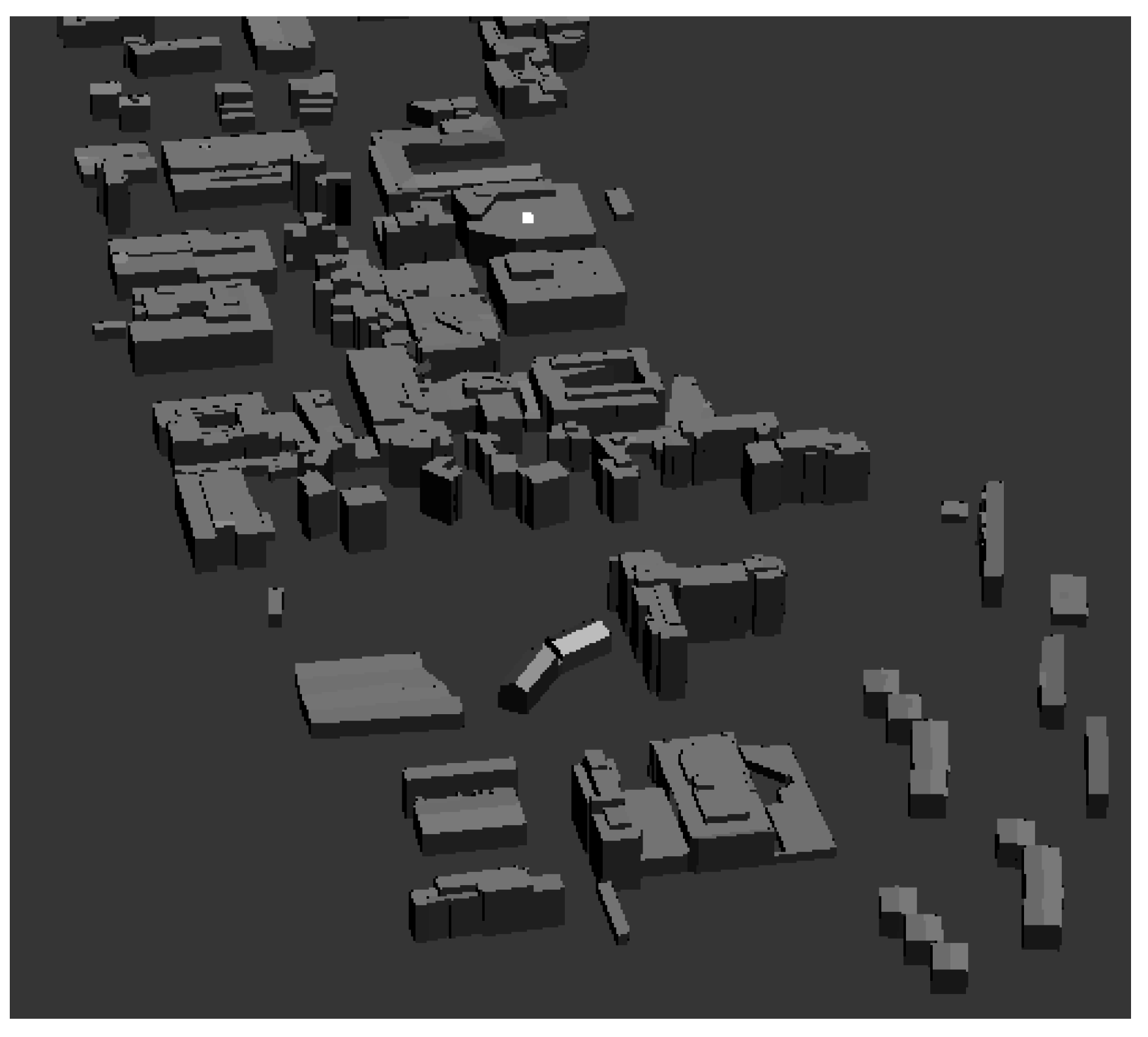
6.2. 3D Building Models


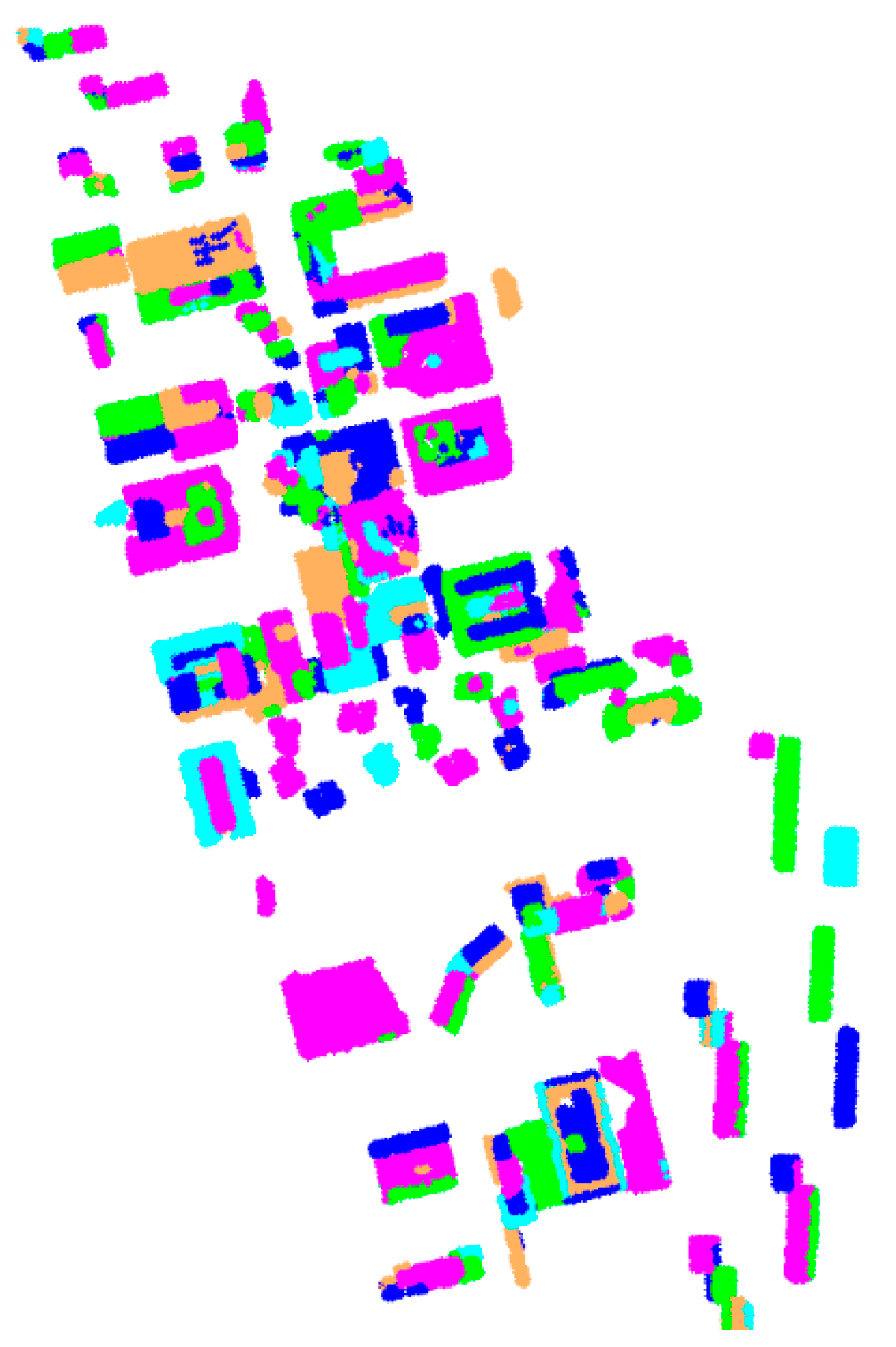
6.2.1. Assessment of roof patch segmentation
6.2.2. Assessment of the height difference between the models and original building points

| Test Location Index | Height of ALS Building Points (m) | Height of Building Models (m) | Height Difference (m) |
|---|---|---|---|
| 1 | 31.61 | 31.59 | 0.02 |
| 2 | 26.84 | 26.74 | 0.10 |
| 3 | 20.04 | 19.91 | 0.13 |
| 4 | 20.76 | 20.52 | 0.24 |
| 5 | 25.04 | 24.93 | 0.11 |
| 6 | 23.81 | 23.76 | 0.05 |
| 7 | 22.72 | 22.44 | 0.28 |
| 8 | 26.86 | 26.61 | 0.25 |
| 9 | 24.91 | 24.86 | 0.05 |
| 10 | 25.36 | 25.10 | 0.26 |
| 11 | 23.21 | 23.02 | 0.19 |
| 12 | 21.81 | 21.57 | 0.24 |
| 13 | 25.89 | 25.81 | 0.08 |
| 14 | 20.51 | 20.33 | 0.18 |
| 15 | 19.72 | 19.58 | 0.14 |
| Average | 0.15 | ||
| RMSE | 0.18 |
6.2.3. Assessment of the distance between the model points and their nearest points in laser data
6.2.4. Discussion concerning quality assessment approaches for reconstructed 3D building models
6.3. 3D Road Networks



| Road No. | Road Data from Reference Data (m) | Detected Road Width (m) | Difference (Absolute Value) (m) | |||
|---|---|---|---|---|---|---|
| Width | Height | Width | Height | Width | Height | |
| Road 1 | 39.71 | 6.26 | 39.90 | 6.11 | 0.19 | 0.15 |
| Road 2 | 8.26 | 8.54 | 8.14 | 8.26 | 0.12 | 0.28 |
| Road 3 | 26.45 | 5.92 | 26.23 | 5.82 | 0.22 | 0.10 |
| Road 4 | 32.18 | 5.14 | 32.43 | 5.35 | 0.25 | 0.21 |
| Road 5 | 19.32 | 8.42 | 19.50 | 8.28 | 0.18 | 0.14 |
| Road 6 | 14.89 | 8.06 | 14.55 | 7.98 | 0.34 | 0.08 |
| Road 7 | 9.38 | 10.17 | 9.08 | 10.06 | 0. 30 | 0.11 |
| Road 8 | 6.71 | 12.08 | 6.56 | 12.11 | 0.15 | 0.03 |
| Average | 0.22 | 0.14 | ||||
| RMSE | 0.23 | 0.16 | ||||
7. Conclusions
- (i)
- The availability of open datasets for 3D scene reconstruction has been demonstrated. The use of open datasets reduces the cost of 3D scene reconstruction.
- (ii)
- The proposed method provided a means of reconstructing 3D buildings from sparse datasets. Our method works for both sparse and dense datasets. A dense point cloud provides higher model accuracy. In contrast, many previous methods developed based on dense datasets may not be applicable for sparse datasets.
- (iii)
- Our method can produce CAD building models for different roof types, e.g., flat and oblique, regularly and irregularly shaped. Furthermore, no extra step is needed to enforce edge to be parallel or building regularization.
- (iv)
- Our study has shown the potential of upgrading the NLS 2D topographic database (e.g., buildings and roads) to a 3D database.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Market Research Report: 3D Modelling and Mapping Market. Available online: http://www.marketsandmarkets.com/ (accessed on 15 August 2014).
- Pollefeys, M.; Nister, D.; Frahm, J.M.; Akbarzadeh, A.; Mordohai, P.; Clipp, B.; Engels, C.; Gallup, D.; Kim, S.J.; Merrell, P.; et al. Detailed real-time urban 3D reconstruction from video. Int. J. Comput. Vis. 2008, 78, 143–167. [Google Scholar] [CrossRef]
- Wright, R. Virtual reality. The Sciences 2013, 27, 8–10. [Google Scholar] [CrossRef]
- Open Data Defined in Wikipedia. Available online: http://en.wikipedia.org/wiki/Open_data (accessed on 19 August 2014).
- ShareGeo Open Repository. Available online: http://www.sharegeo.ac.uk/ (accessed on 15 August 2014).
- Finnish National Land Survey Website. Available online: http://www.maanmittauslaitos.fi/ (accessed on 19 August 2014).
- Geospatial World Forum. Available online: http://www.geospatialworldforum.org/2012/ (accessed on 19 August 2014).
- Haala, N.; Kada, M. An update on automatic 3D building reconstruction. ISPRS J. Photogramm. Remote Sens. 2010, 65, 570–580. [Google Scholar] [CrossRef]
- Tarsha-Kurdi, F.; Landes, T.; Grussenmeyer, P.; Koehl, M. Model-driven and data-driven approaches using LIDAR data: Analysis and comparison. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2007, 36, 87–92. [Google Scholar]
- Vosselman, G. Building reconstruction using planar faces in very high density height data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 1999, 32, 87–94. [Google Scholar]
- Vosselman, G.; Dijkman, S. 3D building model reconstruction from point clouds and ground plans. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2001, 34, 37–44. [Google Scholar]
- Vosselman, G.; Süveg, I. Map based building reconstruction from laser data and images. In Automatic Extraction of Man-Made Objects from Aerial and Space Images, III; Balkema Publishers: Ascona, Switzerland, 2001; pp. 231–239. [Google Scholar]
- Vosselman, G. Fusion of laser scanning data, maps, and aerial photographs for building reconstruction. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS’02), Toronto, Canada, 24–28 June 2002.
- Brenner, C.; Haala, N. Rapid acquisition of virtual reality city models from multiple data sources. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 1998, 32, 323–330. [Google Scholar]
- Brenner, C. Towards fully automatic generation of city models. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2000, 33, 85–92. [Google Scholar]
- Brenner, C. Modelling 3D objects using weak CSG primitives. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 35, 1085–1090. [Google Scholar]
- Brenner, C. Building reconstruction from images and laser scanning. Int. J. Appl. Earth Obs. Geoinf. 2005, 6, 187–198. [Google Scholar] [CrossRef]
- Elberink, S.O. Acquisition of 3D Topography: Automated 3D Road and Building Reconstruction Using Airborne Laser Scanner Data and Topographic Maps. Ph.D. Thesis, University of Twente, Enschede, The Netherlands, 2010. [Google Scholar]
- Elberink, S.O.; Vosselman, G. Adding the third dimension to a topographic database using airborne laser scanner data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2006, 36, 92–97. [Google Scholar]
- Elberink, S.O. Problems in Automated Building Reconstruction Based on dense Airborne Laser Scanning Data. Available online: http://www.researchgate.net/publication/228737634_Problems_in_automated_building_reconstruction_based_on_dense_airborne_laser_scanning_data (accessed on 9 February 2015).
- Elberink, S.O.; Vosselman, G. Building reconstruction by target based graph matching on incomplete laser data: Analysis and limitations. Sensors 2009, 9, 6101–6118. [Google Scholar] [CrossRef] [PubMed]
- Elberink, S.O.; Vosselman, G. Quality analysis on 3D building models reconstructed from airborne laser scanning data. ISPRS J. Photogramm. Remote Sens. 2011, 66, 157–165. [Google Scholar] [CrossRef]
- Haala, N.; Brenner, C. Interpretation of urban surface models using 2D building information. Comput. Vis. Image Underst. 1998, 72, 204–214. [Google Scholar] [CrossRef]
- Haala, N.; Brenner, C. Virtual city model from laser altimeter and 2D map data. Photogramm. Eng. Remote Sens. 1999, 65, 787–795. [Google Scholar]
- Haala, N.; Becker, S.; Kada, M. Cell Decomposition for the Generation of Building Models at Multiple Scales; IAPRS: Dresden, Germany, 2006; pp. 19–24. [Google Scholar]
- Haala, N.; Kada, M. Generation and application of virtual landscape models for location-based services. In GeoSensor Networks; Stefanidis, A., Nittel, S., Eds.; CRC Press: Boca Raton, FL, USA, 2004; pp. 167–178. [Google Scholar]
- Rottensteiner, F.; Sohn, G.; Gerke, M.; Wegner, J.D.; Breitkopf, U.; Jung, J. Results of the ISPRS benchmark on urban object detection and 3D building reconstruction. ISPRS J. Photogramm. Remote Sens. 2014, 93, 256–271. [Google Scholar] [CrossRef]
- Rottensteiner, F.; Briese, C. Automatic generation of building models from LIDAR data and the integration of aerial images. In Proceedings of the ISPRS WG III/3 Workshop on 3-D Reconstruction from Airborne Laserscanner and InSAR Data, Dresden, Germany, 8–10 October 2003.
- Rottensteiner, F.; Trinder, J.; Clode, S.; Kubik, K. Using the Dempster-Shafer method for the fusion of LIDAR data and multispectral images for building detection. Inf. Fusion 2005, 6, 283–300. [Google Scholar] [CrossRef]
- Rottensteiner, F.; Trinder, J.; Clode, S.; Kubik, K. Automated delineation of roof planes from LiDAR data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2005, XXXVI, 221–226. [Google Scholar]
- Rottensteiner, F.; Sohn, G.; Gerke, M.; Wegner, J.D. ISPRS test project on urban classification and 3D building reconstruction. Commission III-Photogrammetric Computer Vision and Image Analysis, Working Group III/4–3D Scene Analysis. Available online: http://www.itc.nl/ISPRS_WGIII4/docs/ComplexScenes.pdf (accessed on 16 March 2015).
- Rottensteiner, F.; Sohn, G.; Jung, J.; Gerke, M.; Baillard, C.; Benitez, S.; Breitkopf, U. The ISPRS benchmark on urban object classification and 3D building reconstruction. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, I-3, 293–298. [Google Scholar] [CrossRef]
- Bulatov, D.; Haufel, G.; Meidow, J.; Pohl, M.; Solbrig, P.; Wernerus, P. Context based automatic reconstruction and texturing of 3D urban terrain for quick response tasks. ISPRS J. Photogramm. Remote Sens. 2014, 93, 157–170. [Google Scholar] [CrossRef]
- Chen, R.; Pei, H.; Yao, W.; Fu, Q. Segmentation of sloped roofs from airborne lidar point clouds using ridge-based hierarchical decomposition. Remote Sens. 2014, 6, 3284–3301. [Google Scholar]
- Dorninger, P.; Pfeifer, N. A comprehensive automated 3D approach for building extraction, reconstruction, and regularization from airborne laser scanning point clouds. Sensors 2008, 8, 7323–7343. [Google Scholar] [CrossRef]
- Hron, V.; Halounová, L. Automatic Generation of 3D building models from point clouds. In Geoinformatics for Intelligent Transportation; Springer: New York, NY, USA, 2015; pp. 109–119. [Google Scholar]
- Huang, H.; Brenner, C.; Sester, M. A generative statistical approach to automatic 3D building roof reconstruction from laser scanning data. ISPRS J. Photogramm. Remote Sens. 2013, 79, 29–43. [Google Scholar] [CrossRef]
- Jochem, A.; Höfle, B.; Wichmann, V.; Rutzinger, M.; Zipf, A. Area-wide roof plane segmentation in airborne LiDAR point clouds. Comput. Environ. Urban Syst. 2012, 36, 54–64. [Google Scholar] [CrossRef]
- Kada, M.; McKinley, L. 3D Building reconstruction from LIDAR Based on a cell decomposition approach. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2009, XXXVIII, 47–52. [Google Scholar]
- Kada, M.; Wichmann, A. Feature-driven 3D building modeling using planar halfspaces. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, II-3/W3, 37–42. [Google Scholar] [CrossRef]
- Kim, K.; Shan, J. Building roof modeling from airborne laser scanning data based on level set approach. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 66, 484–497. [Google Scholar] [CrossRef]
- Lafarge, F.; Alliez, P. Surface reconstruction through point set structuring. Comput. Graph. Forum 2013, 32, 225–234. [Google Scholar] [CrossRef]
- Lafarge, F.; Mallet, C. Creating large-scale city models from 3D-point clouds: A robust approach with hybrid representation. Int. J. Comput. Vis. 2012, 99, 69–85. [Google Scholar] [CrossRef]
- Perera, S.; Mass, H.-G. Cycle graph analysis for 3D roof structure modelling: Concepts and performance. ISPRS J. Photogramm. Remote Sens. 2014, 93, 213–226. [Google Scholar] [CrossRef]
- Rau, J.-Y.; Lin, B.-C. Automatic roof model reconstruction from ALS data and 2D ground plans based on side projection and the TMR algorithm. ISPRS J. Photogramm. Remote Sens. 2011, 66, S13–S27. [Google Scholar] [CrossRef]
- Sampath, A.; Shan, J. Segmentation and reconstruction of polyhedral building roofs from aerial LiDAR point clouds. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1554–1567. [Google Scholar] [CrossRef]
- Seo, S.; Lee, J.; Kim, Y. Extraction of boundaries of rooftop fenced buildings from airborne laser scanning data using rectangle models. IEEE Geosci. Remote Sens. Lett. 2014, 11, 404–408. [Google Scholar] [CrossRef]
- Xiong, B.; Oude Elberink, S.; Vosselman, G. A graph edit dictionary for correcting errors in roof topology graphs reconstructed from point clouds. ISPRS J. Photogramm. Remote Sens. 2014, 93, 227–242. [Google Scholar] [CrossRef]
- Xiong, B.; Oude Elberink, S.; Vosselman, G. Building modeling from noisy photogrammetric point clouds. ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci. 2014, II-3, 197–204. [Google Scholar] [CrossRef]
- Yan, J.; Zhang, K.; Zhang, C.; Chen, S.C.; Narasimhan, G. Automatic construction of 3-D building model from airborne LIDAR data through 2-D snake algorithm. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3–14. [Google Scholar]
- Yang, B.; Xu, W.; Dong, Z. Automated building outlines extraction from airborne laser scanning point clouds. IEEE Geosci. Remote Sens. Lett. 2013. [Google Scholar] [CrossRef]
- Zhou, Q.Y.; Neumann, U. 2.5 D dual contouring: A robust approach to creating building models from aerial LiDAR point clouds. In Proceedings of the European Conference on Computer Vision (ECCV 2010), Heraklion, Crete, Greece, 5–11 September 2010.
- Zhou, Q.Y.; Neumann, U. 2.5 D building modeling by discovering global regularities. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Providence, RI, USA, 16–21 June 2012; pp. 326–333.
- Clode, S.; Rottensteiner, F.; Kootsookos, P.; Zelniker, E. Detection and vectorization of roads from LiDAR data. Photogramm. Eng. Remote Sens. 2007, 73, 517–535. [Google Scholar] [CrossRef]
- Jan, S.; Franke, U.; Förstner, W. A temporal filter approach for detection and reconstruction of curbs and road surfaces based on conditional random fields. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5–9 June 2011.
- Zhang, W. LiDAR-based road and road-edge detection. In Proceedings of the 2010 IEEE Intelligent Vehicles Symposium (IV), San Diego, CA, USA, 21–24 June 2010.
- Boyko, A.; Funkhouser, T. Extracting roads from dense point clouds in large scale urban environment. ISPRS J. Photogramm. Remote Sens. 2011, 66, S2–S12. [Google Scholar] [CrossRef]
- Yang, B.; Fang, L.; Li, Q.; Li, J. Automated extraction of road markings from mobile LiDAR point clouds. Photogramm.Eng. Remote Sens. 2012, 78, 331–338. [Google Scholar] [CrossRef]
- Sukhan, L.; Park, Y. Drivable road modeling based on multilayered LiDAR and vision. In Frontiers of Intelligent Autonomous Systems; Springer: Berlin, Germany, 2013; pp. 69–94. [Google Scholar]
- Ahokas, E.; Kaartinen, H.; Hyyppä, J. On the quality checking of the airborne laser scanningbased nationwide elevation model in Finland. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 267–270. [Google Scholar]
- Puente, I.; González-Jorge, H.; Arias, P.; Armesto, J. Land-based mobile laser scanning systems: A review. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 38, 163–168. [Google Scholar]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: New York, NY, USA, 2006. [Google Scholar]
- Liang, X.; Litkey, P.; Hyyppä, J.; Kaartinen, H.; Vastaranta, M.; Holopainen, M. Automatic stem mapping using single-scan terrestrial laser scanning. IEEE Trans Geosci Remote Sens. 2012, 50, 661–670. [Google Scholar] [CrossRef]
- Hoover, A.; Jean-Baptiste, G.; Jiang, X.; Flynn, P.; Bunke, H.; Goldgof, D.; Bowyer, K.; Eggert, D.; Fitzgibbon, A.; Fisher, R. An experimental comparison of range image segmentation algorithms. IEEE Trans. Pattern. Anal. Mach. Intell. 1996, 18, 673–689. [Google Scholar] [CrossRef]
- Zhu, L.; Hyyppä, J. The use of airborne and mobile laser scanning for modelling railway environments in 3D. Remote Sens. 2014, 6, 3075–3100. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, L.; Lehtomäki, M.; Hyyppä, J.; Puttonen, E.; Krooks, A.; Hyyppä, H. Automated 3D Scene Reconstruction from Open Geospatial Data Sources: Airborne Laser Scanning and a 2D Topographic Database. Remote Sens. 2015, 7, 6710-6740. https://doi.org/10.3390/rs70606710
Zhu L, Lehtomäki M, Hyyppä J, Puttonen E, Krooks A, Hyyppä H. Automated 3D Scene Reconstruction from Open Geospatial Data Sources: Airborne Laser Scanning and a 2D Topographic Database. Remote Sensing. 2015; 7(6):6710-6740. https://doi.org/10.3390/rs70606710
Chicago/Turabian StyleZhu, Lingli, Matti Lehtomäki, Juha Hyyppä, Eetu Puttonen, Anssi Krooks, and Hannu Hyyppä. 2015. "Automated 3D Scene Reconstruction from Open Geospatial Data Sources: Airborne Laser Scanning and a 2D Topographic Database" Remote Sensing 7, no. 6: 6710-6740. https://doi.org/10.3390/rs70606710
APA StyleZhu, L., Lehtomäki, M., Hyyppä, J., Puttonen, E., Krooks, A., & Hyyppä, H. (2015). Automated 3D Scene Reconstruction from Open Geospatial Data Sources: Airborne Laser Scanning and a 2D Topographic Database. Remote Sensing, 7(6), 6710-6740. https://doi.org/10.3390/rs70606710