
Automated Detection of Forest Gaps in Spruce Dominated Stands Using Canopy Height Models Derived from Stereo Aerial Imagery

Abstract
:
1. Introduction
2. Material and Methods
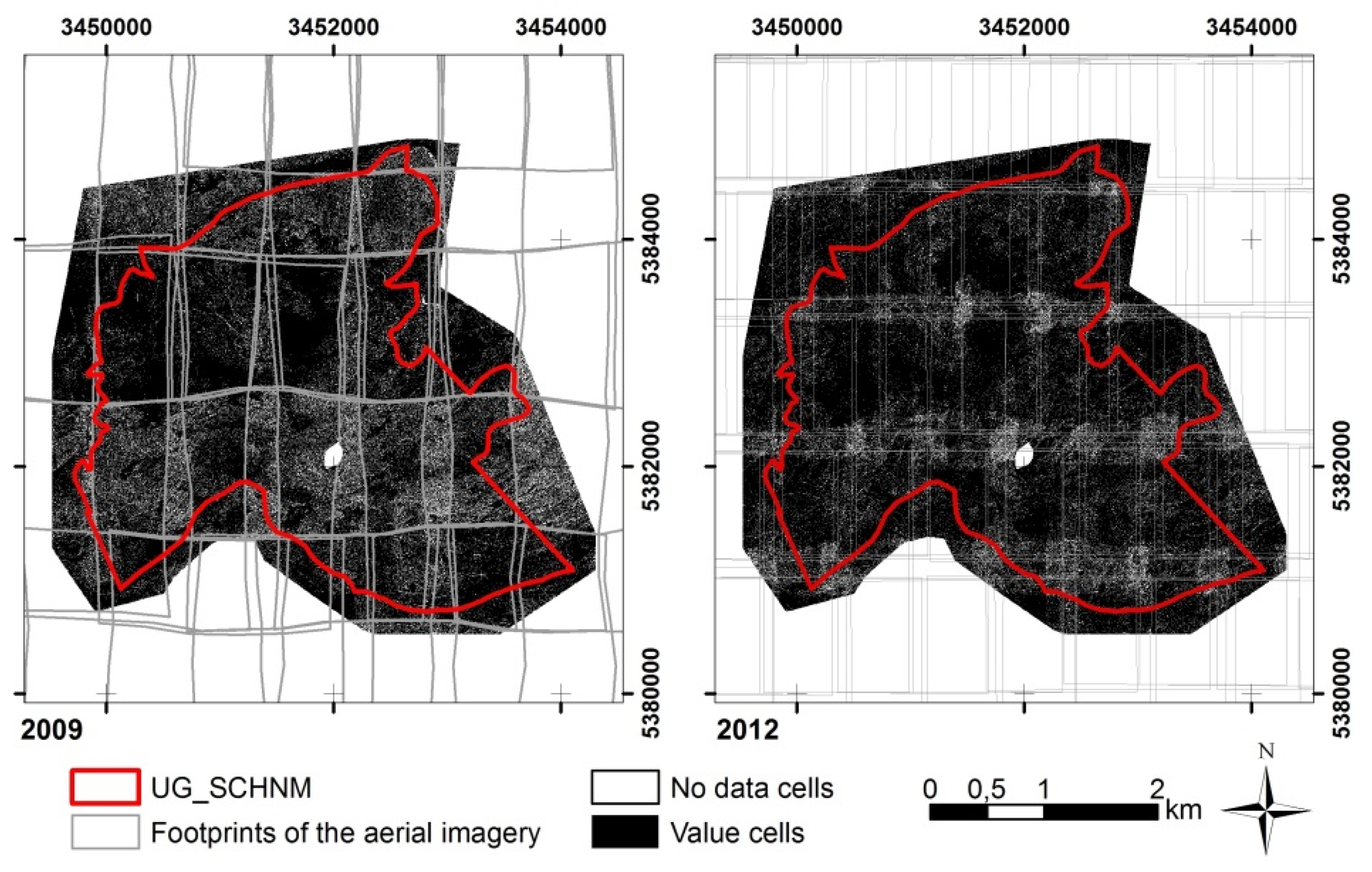
2.1. Study Area
2.2. Material
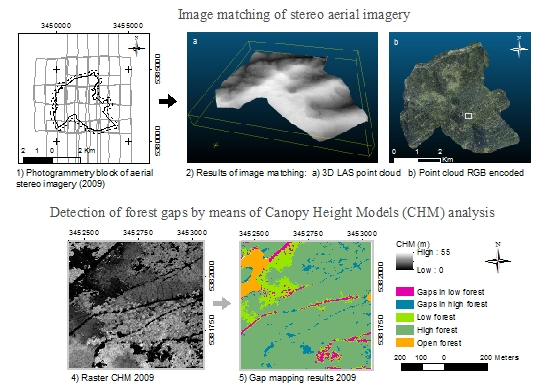
2.2.1. Aerial Imagery
2.2.2. Additional Data Sources
2.3. Methods
2.3.1. Forest Gap Definition
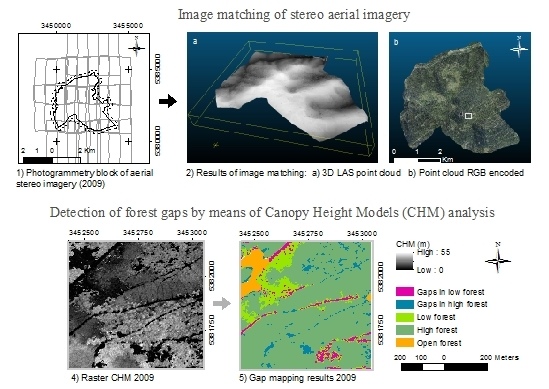
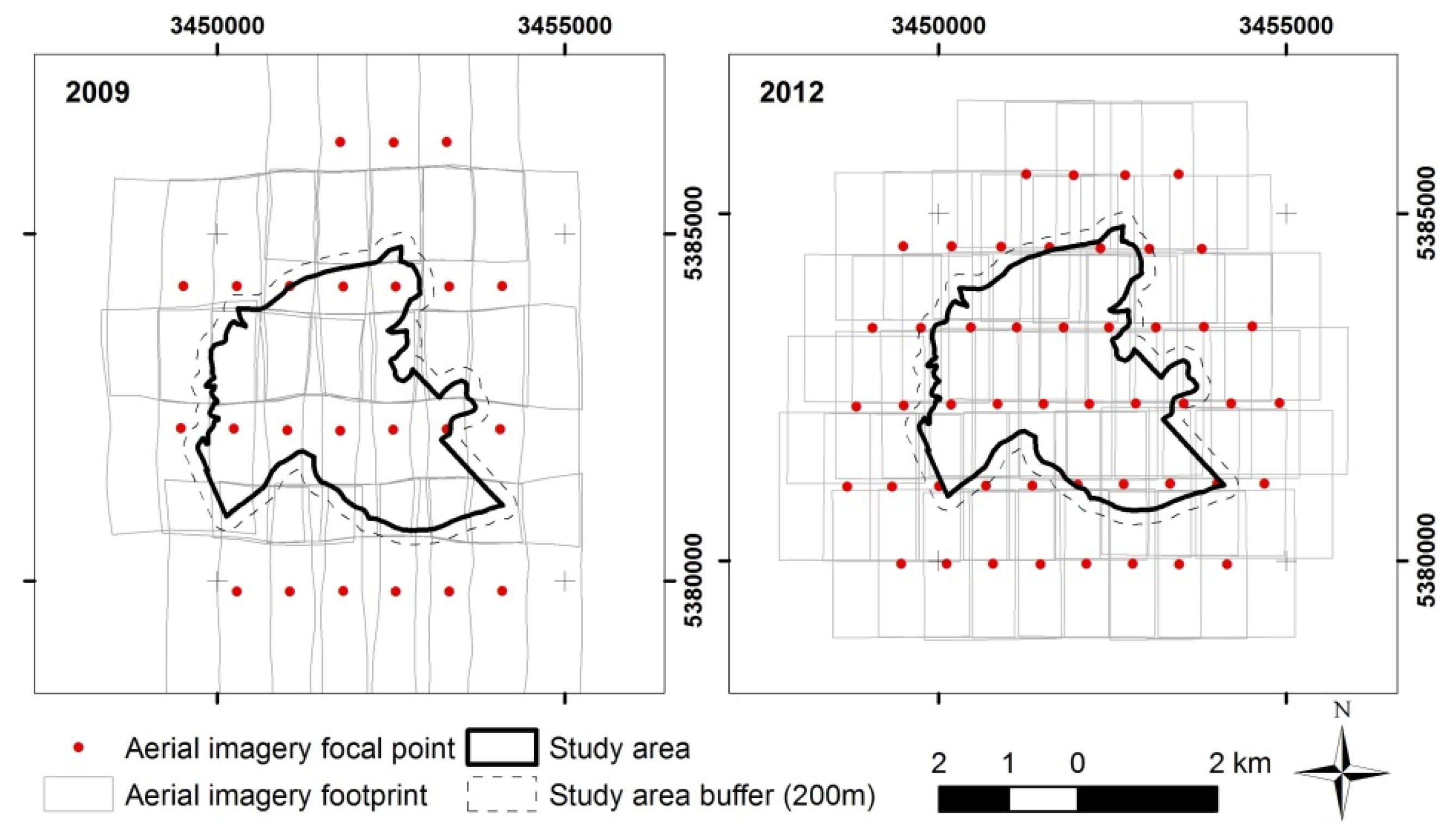
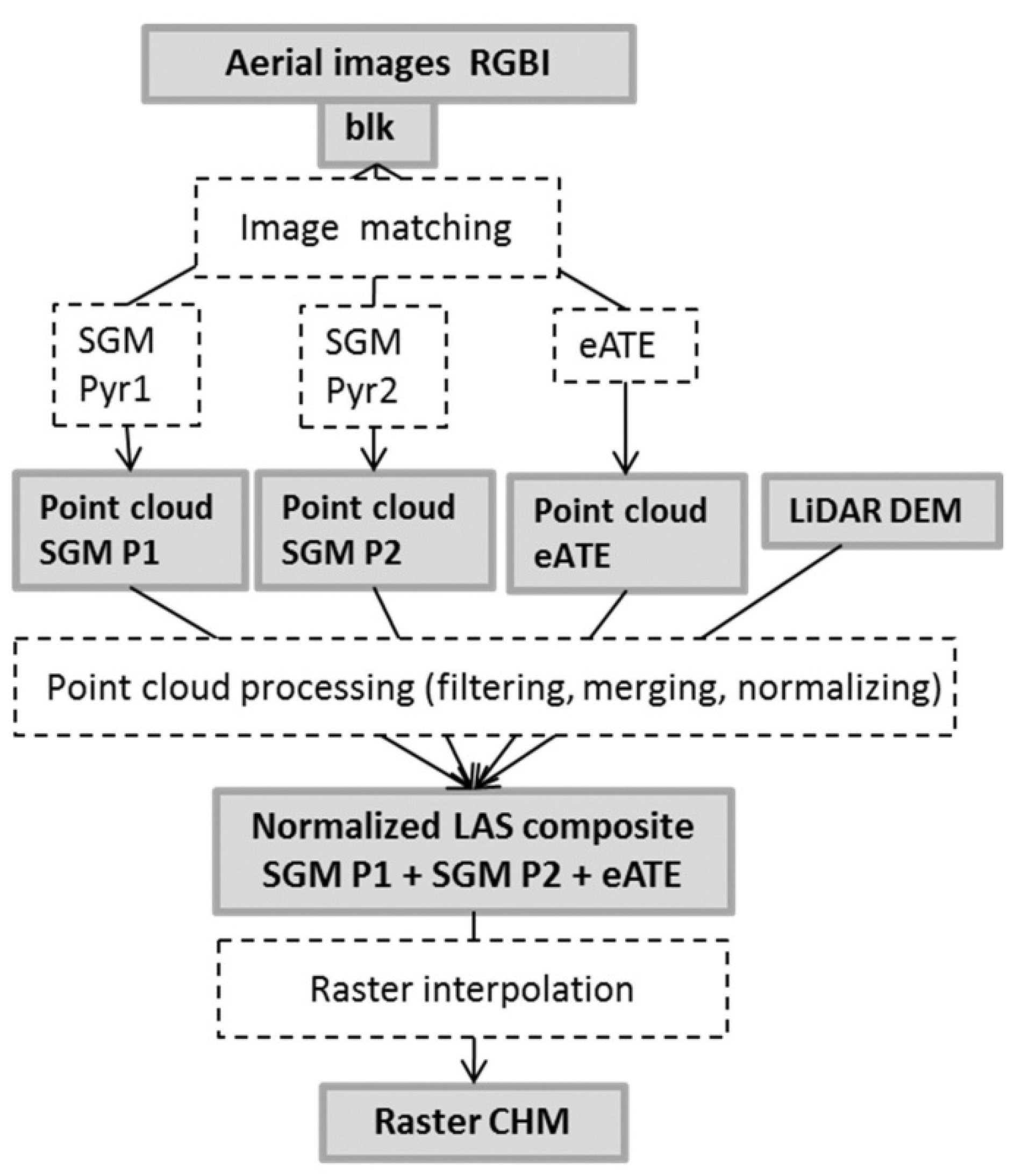
2.3.2. Calculation of Canopy Height Models (CHM)
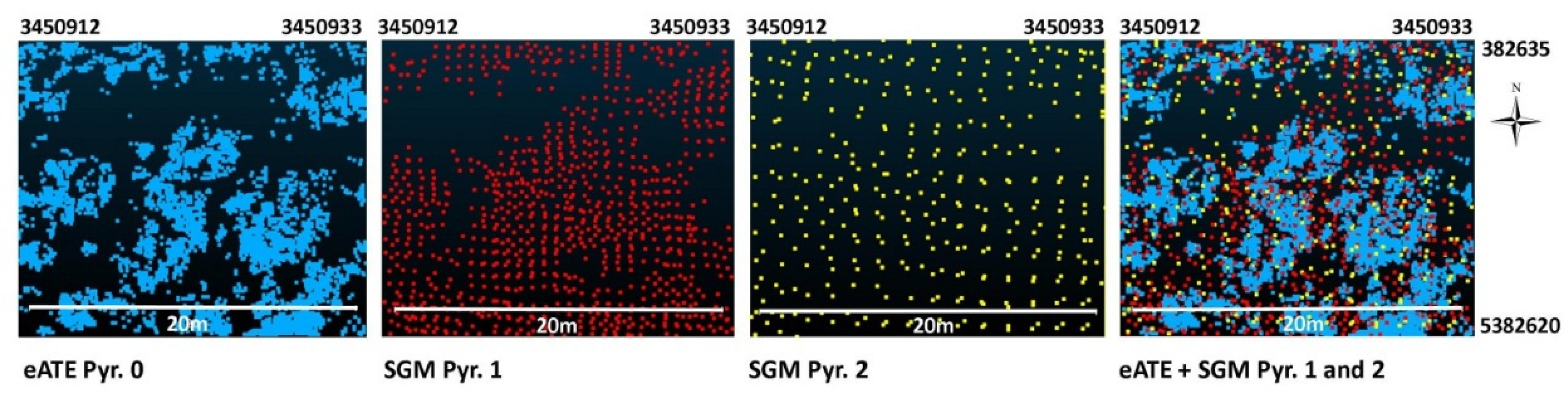
Image Matching
Point Cloud Processing
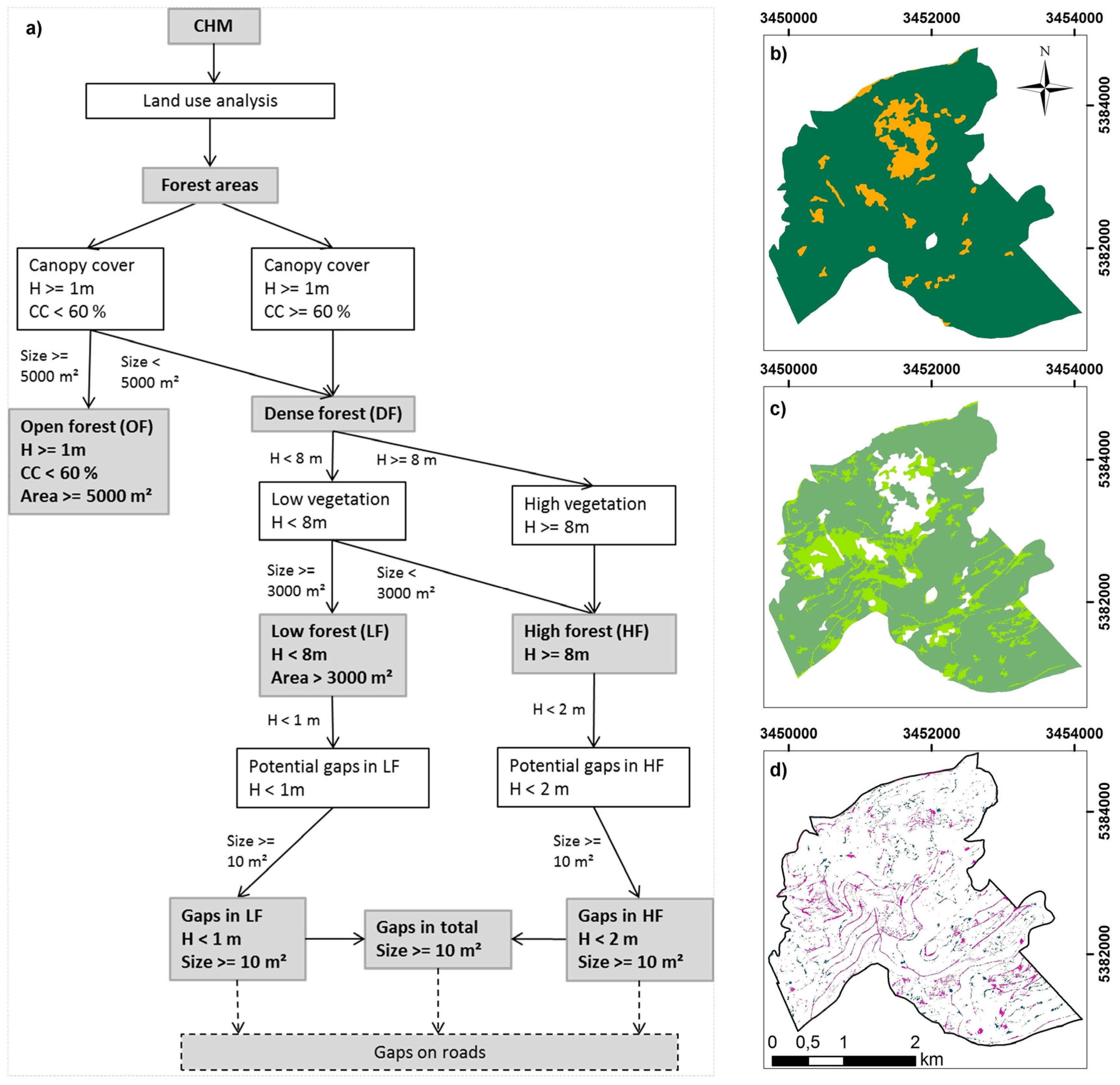
2.3.3. Gap Extraction
Open and Dense Forest
Low and High Stands
Forest Gaps
Gaps on and Next to Forest Roads
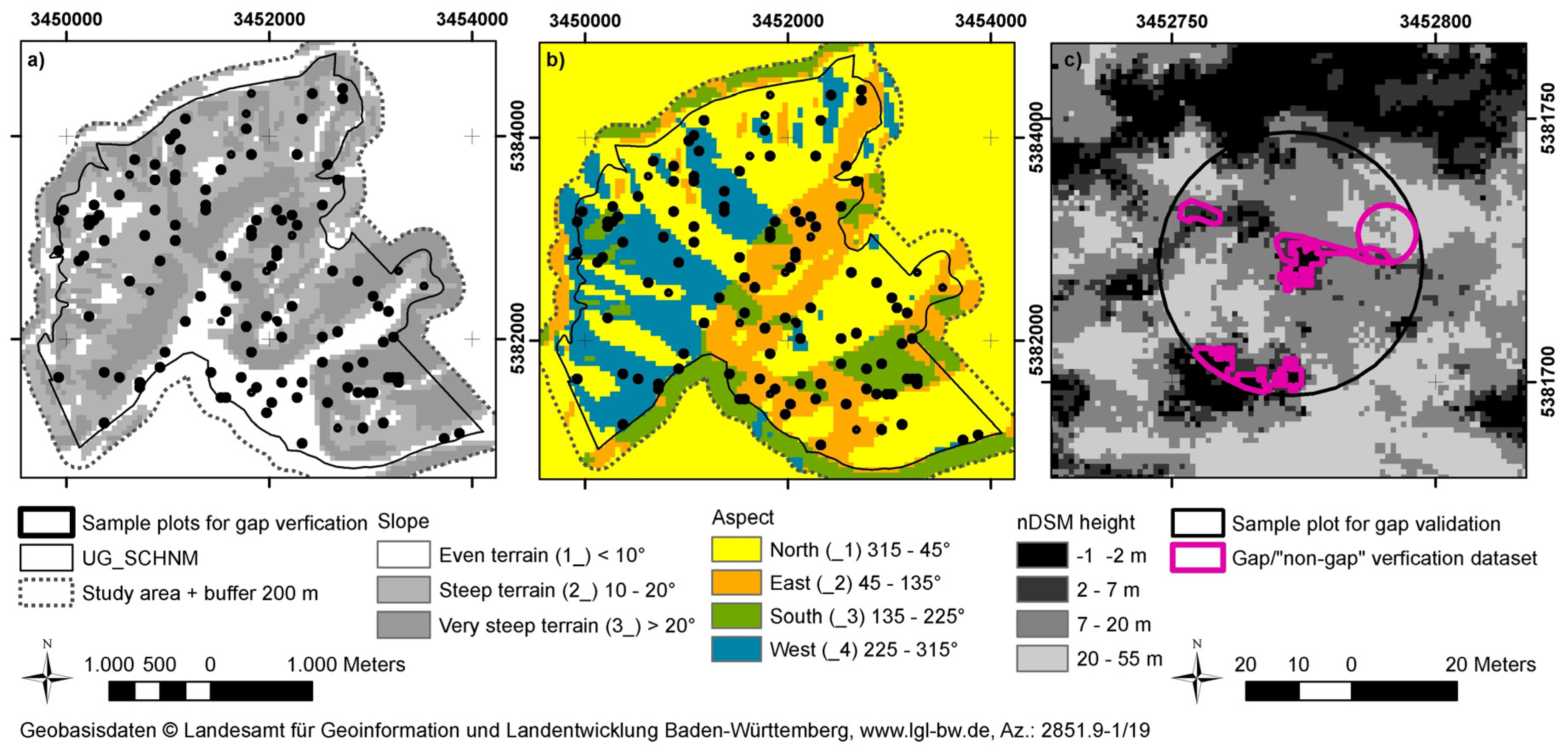
2.3.4. Validation
Open-Dense Forest
Gaps
Variables Affecting Mapping Accuracy
3. Results
3.1. Mapping of Open and Dense Forest
3.2. Identification of Low and High Forest
3.3. Forest Gaps Mapping
3.3.1. Mapping Accuracy
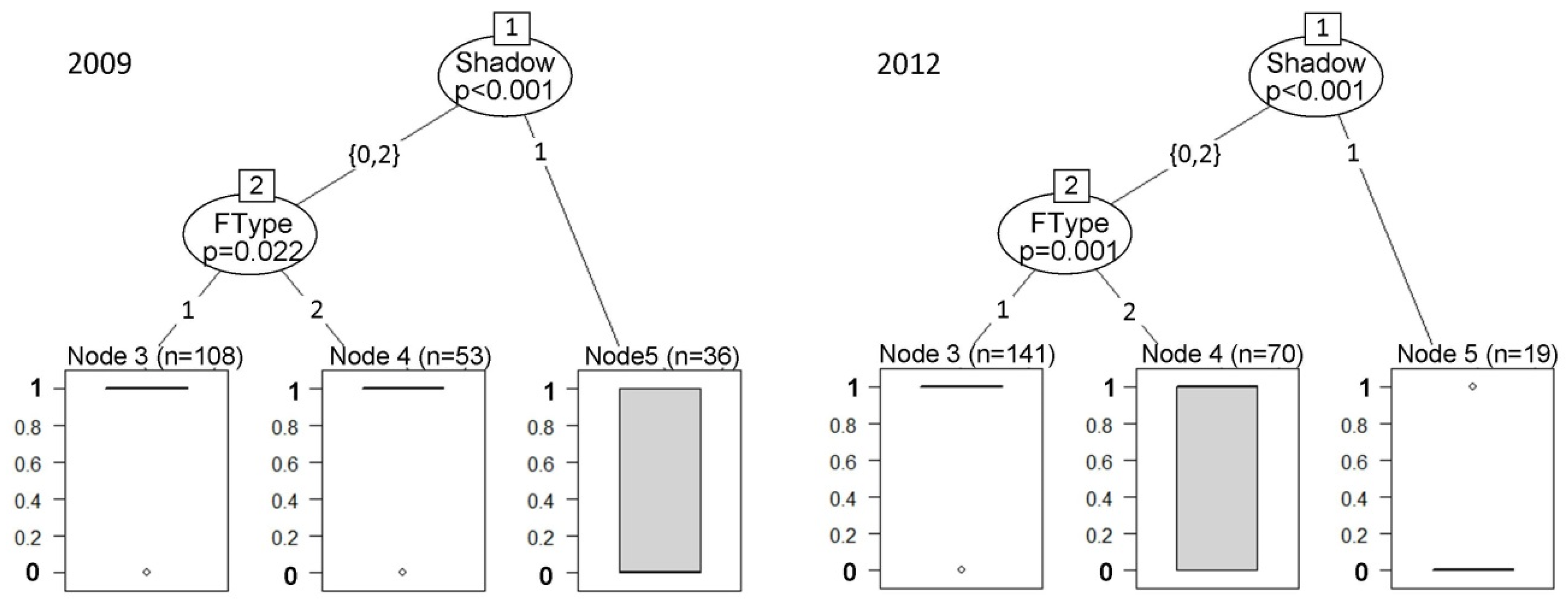
3.3.2. Variables Affecting Mapping Accuracy
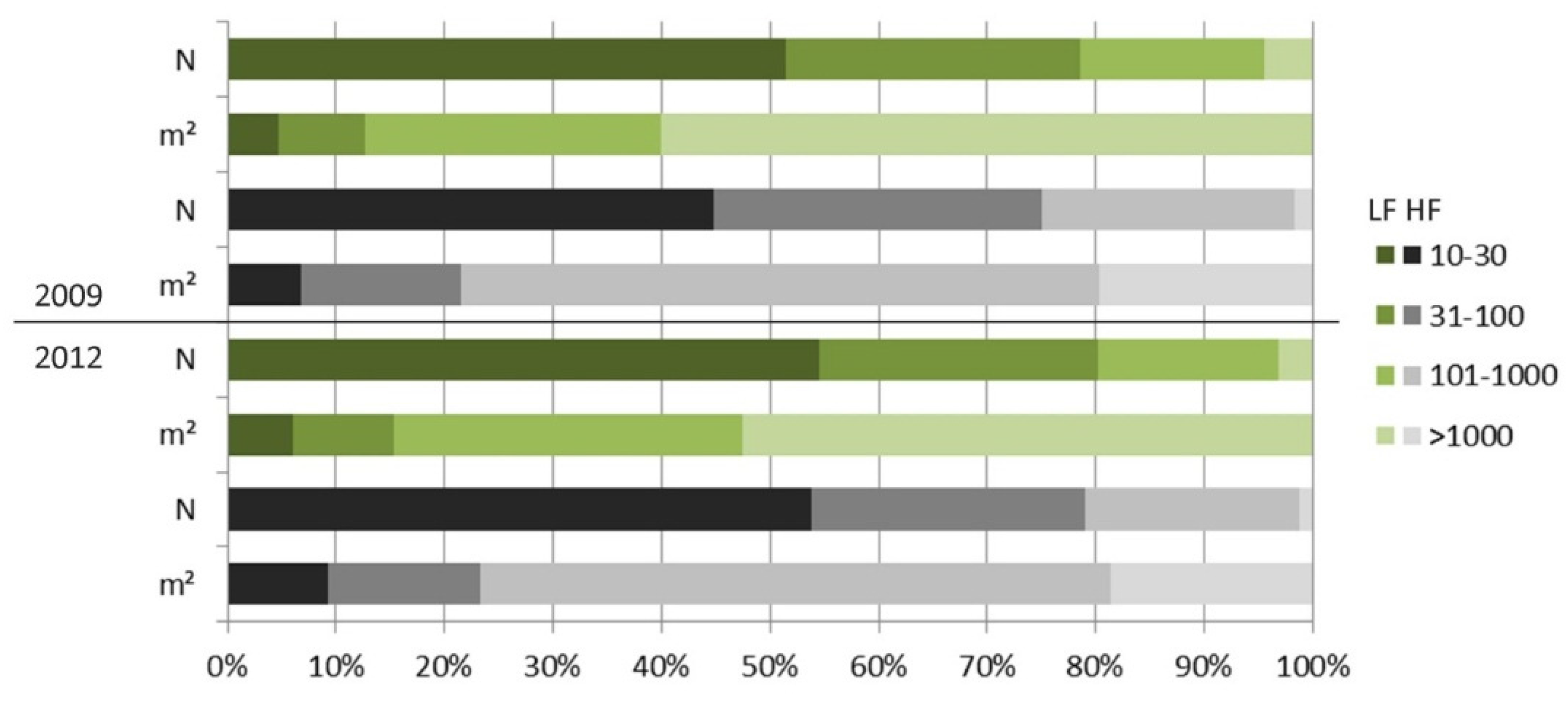
3.3.3. Gap Size and Total Area
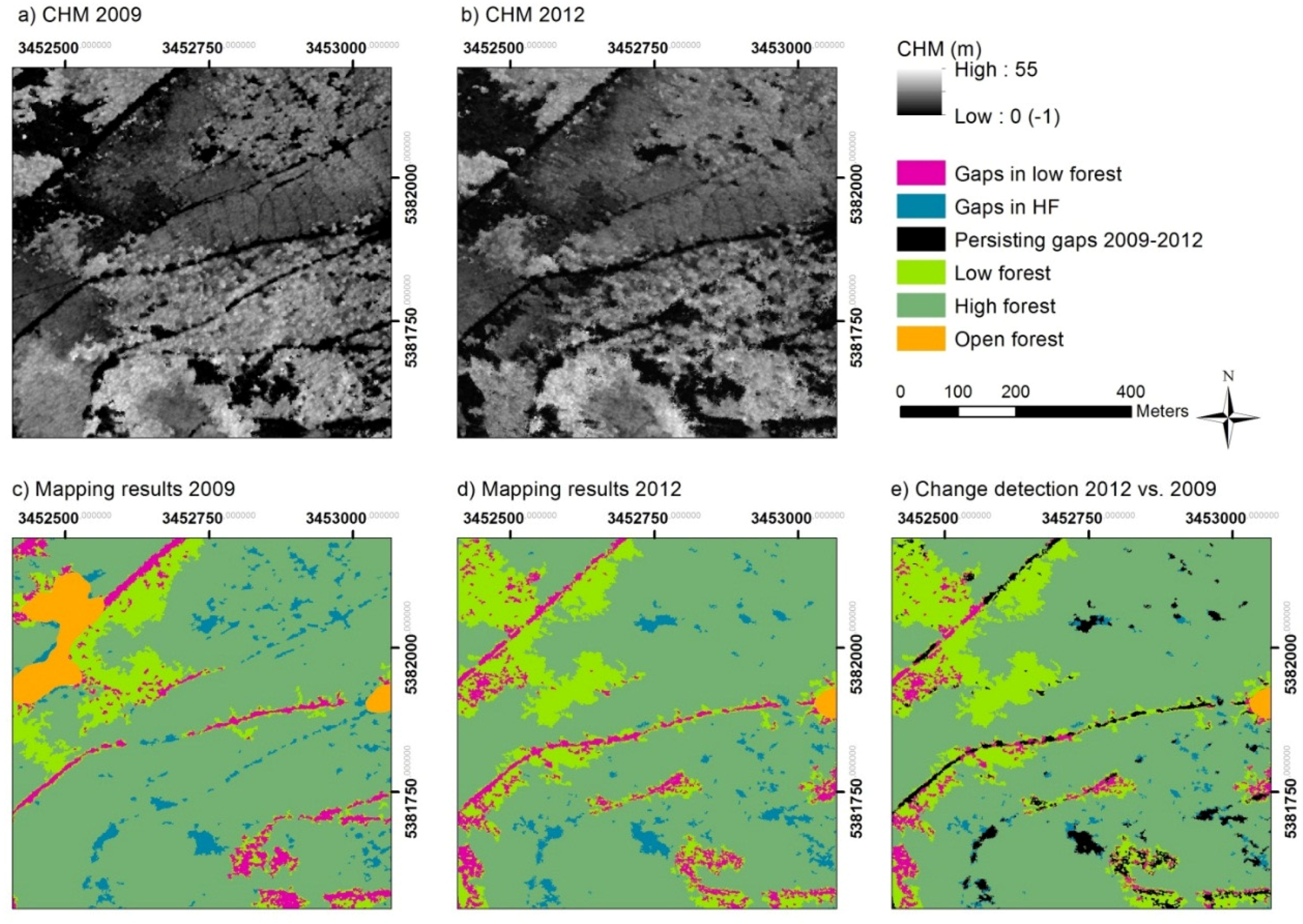
3.3.4. Gap Changes
3.3.5. Gaps on Forest Roads
4. Discussion
4.1. Image Matching and Canopy Height Models
4.2. Forest Classification and Gap Identification
4.3. Gap Density and Post-Processing
4.4. Application in Biodiversity Studies
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References and Note
- Lindenmayer, D.B.; Margules, C.R.; Botkin, D.B. Indicators of Biodiversity for Ecologically Sustainable Forest Management. Conserv. Biol. 2000, 14, 941–950. [Google Scholar] [CrossRef]
- Lindenmayer, D.B.; Franklin, J.F.; Fischer, J. General management principles and a checklist of strategies to guide forest biodiversity conservation. Conserv. Biol. 2006, 131, 433–445. [Google Scholar] [CrossRef]
- Noss, R.F. Indicators for Monitoring of Biodiversity. A Hierarchical Approach. Conserv. Biol. 1990, 4, 355–364. [Google Scholar] [CrossRef]
- Smith, G.F.; Gittings, T.; Wilson, M.; French, L.; Oxbrough, A.; O’Donoghue, S.; O’Halloran, J.; Kelly, D.L.; Mitchell, F.J.G.; Kelly, T.; et al. Identifying practical indicators of biodiversity for stand-level management of plantation forests. Biodivers. Conserv. 2008, 17, 991–1015. [Google Scholar] [CrossRef]
- Müller, J.; Brandl, R. Assessing biodiversity by remote sensing in mountainous terrain: The potential of LiDAR to predict forest beetle assemblages. J. Appl. Ecol. 2009, 46, 897–905. [Google Scholar] [CrossRef]
- Zellweger, F.; Braunisch, V.; Baltensweiler, A.; Bollmann, K. Remotely sensed forest structural complexity predicts multi species occurrence at the landscape scale. For. Ecol. Manag. 2013, 307, 303–312. [Google Scholar] [CrossRef]
- Koukoulas, S.; Blackburn, G.A. Quantifying the spatial properties of forest canopy gaps using LiDAR imagery and GIS. Int. J. Remote Sens. 2004, 25, 3049–3071. [Google Scholar] [CrossRef]
- Sierro, A.; Arlettaz, R.; Naef-Daenzer, B.; Strebel, S.; Zbinden, N. Habitat use and foraging ecology of the nightjar (Caprimulgus europaeus) in the Swiss Alps: Towards a conservation scheme. Conserv. Biol. 2001, 98, 325–331. [Google Scholar] [CrossRef]
- Braunisch, V. Spacially Explicit Species-Habitat Models for Large-Scale Conservation Planning. Modelling Habitat Potential and Habitat Connectivity for Capercaillie (Tetrao urogallus). Ph.D. Thesis, Albert-Ludwigs-Universität Freiburg im Breisgau, Freiburg im Breisgau, Germany, 2008. [Google Scholar]
- Hölzinger, J.; Mahler, U. Die Vögel Baden-Württembergs. Band 2.3: Nicht-Singvögel 3; Verlag Eugen Ulmer: Stuttgart, Germany, 2001. [Google Scholar]
- Aschoff, T.; Spiecker, H.; Holdenried, M.W. Terrestrische Laserscanner und akustische Ortungssysteme: Jagdlebensräumen von Fledermäusen. AFZ-DerWald 2006, 4, 172–175. [Google Scholar]
- Runkel, V. Mikrohabitatnutzung syntoper Waldfledermäuse. Ein Vergleich der genutzten Strukturen in anthropogen geformten Waldbiotopen Mitteleuropas. Ph.D. Thesis, Friedrich-Alexander-Universität Erlangen-Nürnberg, Erlangen-Nürnberg, Germany, 2008. [Google Scholar]
- Patriquin, K.J.; Barclay, R.M.R. Foraging by bats in cleared, thinned and unharvested boreal forest. J. Appl. Ecol. 2003, 40, 646–657. [Google Scholar] [CrossRef]
- Seibold, S.; Brandl, R.; Buse, J.; Hothorn, T.; Schmidl, J.; Thorn, S.; Müller, J. Association of extinction risk of saproxylic beetles with ecological degradation of forests in Europe. Conserv. Biol. 2014, 29, 382–390. [Google Scholar] [CrossRef] [PubMed]
- Braunisch, V.; Coppes, J.; Arlettaz, R.; Suchant, R.; Zellweger, F.; Bollmann, K. Temperate mountain forest biodiversity under climate change: Compensating negative effects by increasing structural complexity. PLoS ONE 2014, 9, e97718. [Google Scholar] [CrossRef] [PubMed]
- Getzin, S.; Nuske, R.S.; Wiegand, K. Using Unmanned Aerial Vehicles (UAV) to quantify spatial gap patterns in forests. Remote Sens. 2014, 6, 6988–7004. [Google Scholar] [CrossRef]
- Boncina, A. Conceptual approaches to integrate nature conservation into forest management: A central European perspective. Int. For. Rev. 2011, 13, 13–22. [Google Scholar]
- Noss, R.F. Assessing and monitoring forest biodiversity: A suggested framework and indicators. For. Ecol. Manag. 1999, 115, 135–146. [Google Scholar] [CrossRef]
- Scherzinger, W. Naturschutz im Wald: Qualitätsziele einer Dynamischen Waldentwicklung; Ulmer: Stuttgart, Germany, 1996; p. 447. [Google Scholar]
- Johann, E. Historical development of nature-based forestry in Central Europe. In Nature-Based Forestry in Central Europe. Alternatives to Industrial Forestry and Strict Preservation. Studia Forestalia Slovenica Nr. 126; Diaci, J., Ed.; Department of Forestry and Renewable Forest Resources-Biotechnical Faculty, University of Ljubljana: Ljubljana, Slovenia, 2006; p. 167. [Google Scholar]
- Bässler, C.; Stadler, J.; Müller, J.; Förster, B.; Göttlein, A.; Brandl, R. LiDAR as a rapid tool to predict forest habitat types in Natura 2000 networks. Biodivers. Conserv. 2010, 20, 456–481. [Google Scholar] [CrossRef]
- Kathke, S.; Bruelheide, H. Gap dynamics in a near-natural spruce forest at Mt. Brocken, Germany. For. Ecol. Manag. 2010, 259, 624–632. [Google Scholar] [CrossRef]
- Garbarino, M.; Borgogno Mondino, E.; Lingua, E.; Nagel, T.A.; Dukić, V.; Govedar, Z.; Motta, R. Gap disturbances and regeneration patterns in a Bosnian old-growth forest: A multispectral remote sensing and ground-based approach. Ann. For. Sci. 2012, 69, 617–625. [Google Scholar] [CrossRef]
- Hobi, M.L.; Commarmot, B.; Ginzler, C.; Bugmann, H. Gap pattern of the largest primeval beech forest of Europe revealed by remote sensing. Ecosphere 2015, 6. art76. [Google Scholar] [CrossRef]
- Vepakomma, U. Spatial contiguity and continuity of canopy gaps in mixed wood boreal forests: Persistence, expansion, shrinkage and displacement. J. Ecol. 2012, 100, 1257–1268. [Google Scholar] [CrossRef]
- Vepakomma, U.; Kneeshaw, D.; Fortin, M.-J. Interactions of multiple disturbances in shaping boreal forest dynamics: A spatially explicit analysis using multi-temporal lidar data and high-resolution imagery. J. Ecol. 2010, 98, 526–539. [Google Scholar] [CrossRef]
- Rugani, T.; Diaci, J.; Hladnik, D. Gap dynamics and structure of two old-growth beech forest remnants in Slovenia. PLoS ONE 2013, 8, e52641. [Google Scholar] [CrossRef] [PubMed]
- Getzin, S.; Wiegand, K.; Schöning, I. Assessing biodiversity in forests using very high-resolution images and unmanned aerial vehicles. Methods Ecol. Evol. 2012, 3, 397–404. [Google Scholar] [CrossRef]
- Zellweger, F.; Morsdorf, F.; Purves, R.S.; Braunisch, V.; Bollmann, K. Improved methods for measuring forest landscape structure: LiDAR complements field-based habitat assessment. Biodivers. Conserv. 2013, 23, 289–307. [Google Scholar] [CrossRef]
- Ginzler, C.; Hobi, M.L. Countrywide stereo-image matching for updating digital surface models in the framework of the swiss national forest inventory. Remote Sens. 2015, 7, 4343–4370. [Google Scholar] [CrossRef]
- Waser, L.T.; Ginzler, C.; Kuechler, M.; Baltsavias, E.; Hurni, L. Semi-automatic classification of tree species in different forest ecosystems by spectral and geometric variables derived from Airborne Digital Sensor (ADS40) and RC30 data. Remote Sens. Environ. 2011, 115, 76–85. [Google Scholar] [CrossRef]
- Straub, C.; Stepper, C.; Seitz, R.; Waser, L.T. Potential of UltraCamX stereo images for estimating timber volume and basal area at the plot level in mixed European forests. Can. J. For. Res. 2013, 43, 731–741. [Google Scholar] [CrossRef]
- Wang, Z.; Waser, L.T.; Ginzler, C. A novel method to assess short-term forest cover changes based on digital surface models from image-based point clouds. Forestry 2015, 88, 1–12. [Google Scholar] [CrossRef]
- Kotremba, C. Hochauflösende fernerkundliche Erfassung von Waldstrukturen im GIS am Beispiel der Kernzone “Quallgebiet der Wieslauter“ im Pfälzerwald. AFZ-DerWald 2014, 9, 12–15. [Google Scholar]
- Betts, H.D.; Brown, L.J.; Stewart, G.H. Forest canopy gap detection and characterisation by use of high-resolution Digital Elevation Models. N. Z. J. Ecol. 2005, 29, 95–103. [Google Scholar]
- Braunisch, V.; Suchant, R. Using ecological forest site mapping for long-term habitat suitability assessments in wildlife conservation-Demonstrated for capercaillie (Tetrao urogallus). For. Ecol. Manag. 2008, 256, 1209–1221. [Google Scholar] [CrossRef]
- Zellweger, F.; Braunisch, V.; Morsdorf, F.; Baltensweiler, A.; Abegg, M.; Roth, T.; Bugmann, H.; Bollmann, K. Disentangling the effects of climate, topography, soil and vegetation on stand-scale species richness in temperate forests. For. Ecol. Manag. 2015, 349, 36–44. [Google Scholar] [CrossRef]
- AG Boden. Bodenkundliche Kartieranleitung, Ad-hoc-Arbeitsgruppe Boden der Geologischen Landesämter und der Bundesanstalt für Geowissenschaften und Rohstoffe der Bundesrepublik Deutschland; 4. Auflage, Nachdruck; Finnern, H., Grottenthaler, W., Kühn, D., Pälchen, W., Schraps, W.-G., Sponagel, H., Eds.; Bundesanstalt für Geowissenschaften und Rohstoffe und Geologische Landesämter: Hannover, Germany, 1996; p. 392. [Google Scholar]
- Landesamt für Geoinformation und Landentwicklung Baden-Württemberg, LGL, Geobasisdaten © www.lgl-bw.de Az.: 2851.9–1/19. 2015.
- Mantel, K. Wald und Forst in der Geschichte : Ein Lehr- und Handbuch. Mit e. Vorw. von Helmut Brandl; Schaper: Alfeld, Hannover, Germany, 1990; p. 512. [Google Scholar]
- Moosmayer, H.U. Ausscheidung von Waldschutzgebieten: Hier: Schonwald “Kleemiss” im Forstbezirk Klosterreichenbach; V 794.2/1-4; Ministerium für Ernährung, Landwirtschaft, Weinbau und Forsten Baden-Württemberg: Stuttgart, Germany, 1972; p. 2. [Google Scholar]
- Landesamt für Geoinformation und Landentwicklung Baden-Württemberg, LGL. Digitale Geländemodelle (DGM). Available online: https://www.lgl-bw.de/lgl-internet/opencms/de/05_Geoinformation/Geotopographie/Digitale_Gelaendemodelle/ (accessed on 30 October 2015).
- Landesamt für Geoinformation und Landentwicklung Baden-Württemberg, LGL. ATKIS®-Amtliches Topographisch-Kartographisches Informationssystem. Available online: http://www.lgl-bw.de/lgl-internet/opencms/de/05_Geoinformation/AAA/ATKIS/ (accessed on 30 October 2015).
- Mathow, T.; ForstBW; Regierungspräsidium Freiburg, Forstdirektion. Referat 84 Forsteinrichtung und Forstliche Geoinformation, Freiburg, Germany. Personal communication, 3 November 2015.
- Schliemann, S.A.; Bockheim, J.G. Methods for studying treefall gaps: A review. For. Ecol. Manag. 2011, 261, 1143–1151. [Google Scholar] [CrossRef]
- Brokaw, N.V.L. The definition of treefall gap and its effect on measures of forest dynamics. Biotropica 1982, 14, 158–160. [Google Scholar] [CrossRef]
- Runkle, J.R. Gap regeneration in some old-growth forests of the eastern United States. Ecology 1981, 62, 1041–1051. [Google Scholar] [CrossRef]
- Hytteborn, H.; Verwijst, T. Small-scale disturbance and stand structure dynamics in an old-growth Picea abies forest over 54 yr in central Sweden. J. Veg. Sci. 2013, 25, 100–112. [Google Scholar] [CrossRef]
- Qinghong, L.; Hytteborn, H. Gap structure, disturbance and regeneration in a primeval Picea abies forest. J. Veg. Sci. 1991, 2, 391–402. [Google Scholar]
- Ahrens, W.; Brockamp, U.; Pisoke, T. Zur Erfassung von Waldstrukturen im Luftbild. Arbeitsanleitung für Waldschutzgebiete Baden-Württemberg. Waldschutzgebiete Baden-Württemberg 2004, 5, 54. [Google Scholar]
- Müller, K.H.; Wagner, S. Störungslücken in Fichtenbeständen des Erzgebirges: Initiale eines Waldumbaues. Forst Holz, 58. Jahrgang 2003, 13/14, 407–411. [Google Scholar]
- ERDAS, ©Intergraph Corporation. LPS eATE. From Image to Point Clouds: Model Your World Like never before. Product Sheet. 2012. Vol. 5/12 GEO-US-0033A-ENG. Available online: https://www.intergraphgovsolutions.com/assets/product-sheet/LPS%20eATE%20Product%20Sheet.pdf (accessed on 2 November 2015).
- Hexagon Geospatial, ©Intergraph® Corporation. ERDAS IMAGINE Help. XPro Semi-Global Matching. Available online: https://hexagongeospatial.fluidtopics.net/en/book#!book;uri=f2790e0ca81311531f1a57c6b7bc80b2;breadcrumb=23b983d2543add5a03fc94e16648eae7-b70c75349e3a9ef9f26c972ab994b6b6–572fc16c2299fb0cf9dea36da3f6df73–77e5f6815e5da847bab34f6d88a2efec-895bc642e4bd922f332936d584d19af7 (accessed on 2 November 2015).
- Adler, P.; Naake, T.; Peters, S.; Ginzler, C.; Bauerhansl, C.; Stepper, C. Reliability of forest canopy height extraction from digital aerial images. In Proceedings of the ForestSAT Conference, Riva del Garda (TN), Italy, 4–7 November 2014.
- Rapidlasso GmbH. LAStools - Fast Tools To Catch Reality. © 2007–2014, rapidlasso GmbH, Germany. Available online: http://rapidlasso.com/LAStools (accessed on 3 December 2014).
- Environmental Systems Resource Institute (ESRI). ArcMap 10.3; ESRI: Redlands, CA, USA, 2014. [Google Scholar]
- GEOSYSTEMS GmbH, ©Intergraph® Corporation. Stereoauswertung mit Erdas extensions für ArcGIS®; Product sheet; Intergraph: Germering, Germany, 2014; Available online http://www.geosystems.de/infomaterial/2_Produktinfos/ ArcGISExtensions/SAfAG_Flyer_dt_09-2015.pdf (accessed on 2 November 2015).
- AFL, Arbeitsgruppe Forstlicher Luftbildinterpreten. Luftbildinterpretationsschlüssel–Bestimmungsschlüssel für die Beschreibung von strukturreichen Waldbeständen im Color-Infrarot-Luftbild; Troyke, A., Habermann, R., Wolff, B., Gärtner, M., Engels, F., Brockamp, U., Hoffmann, K., Scherrer, H.-U., Kenneweg, H., Kleinschmit, B., et al., Eds.; Landesforstpräsidium (LFP) Freistaat Sachsen: Pirna, Germany, 2003. [Google Scholar]
- Story, M.; Congalton, R.G. Accuracy assessment: A user’s perspective. Photogram. Eng. Remote Sens. 1986, 52, 397–399. [Google Scholar]
- Rossiter, D.G. Technical Note: Statistical Methods for Accuracy Assesment of Classified Thematic Maps; International Institute for Geo-information Science & Earth Observation (ITC): Enschede, The Netherlands, 2014. [Google Scholar]
- Congalton, R.G. A review of assessing the accuracy of classifications of remotely sensed Data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Stehman, S.V.; Czaplewski, R.L. Design and analysis for thematic map accuracy assessment: Fundamental principles. Remote Sens. Environ. 1998, 64, 331–344. [Google Scholar] [CrossRef]
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Measur. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Kuhn, M.; Wing, J.; Weston, S.; Williams, A.; Keefer, C.; Engelhardt, A.; Cooper, T.; Mayer, Z.; Kenkel, B.; the R Core Team; et al. Package “Caret”, Classification and Regression Training. 6.0–52. Reference Manual. Available online: https://cran.r-project.org/web/packages/caret/caret.pdf (accessed on 3 August 2015).
- Wrbka, T.; Szerencisits, E.; Peterseil, J.; Thurner, B. (Eds.) SINUS Kulturlandschaft—Methoden. Kulturlandschaftskartierung. Abteilung für Vegetationsökologie und Naturschutzforschung. Institut für Ökologie und Naturschutz, Universität Wien: Wien, Österreich. Available online: http://131.130.59.133/projekte/sinus/klkart10/methoden/kartierung.htm (accessed on 20 February 2015).
- Hothorn, T.; Hornik, K.; Zeileis, A. Unbiased recursive partitioning: A conditional inference framework. J. Comput. Graph. Stat. 2006, 15, 651–674. [Google Scholar] [CrossRef]
- Hothorn, T.; Zeileis, A. Partykit: A modular toolkit for recursive partytioning in R. Reference Manual. Available online: https://cran.r-project.org/web/packages/partykit/partykit.pdf (accessed on 3 August 2015).
- Hobi, M.L.; Ginzler, C. Accuracy assessment of digital surface models based on WorldView-2 and ADS80 stereo remote sensing data. Sensors 2012, 12, 6347–6368. [Google Scholar] [CrossRef] [PubMed]
- McElhinny, Ch.; Gibbons, P.; Brack, C.; Bauhus, J. Forest and woodland stand structural complexity: Its definition and measurement. For. Ecol. Manag. 2005, 218, 1–24. [Google Scholar] [CrossRef]
- Gaulton, R.; Malthus, T.J. LiDAR Mapping of Canopy Gaps in Continuous Cover Forests; A Comparison of a Canopy Height Model and Point Cloud Based Techniques; SilviLaser: Edinburgh, UK, 2008; pp. 407–416. [Google Scholar]
- Braunisch, V.; Suchant, R. Aktionsplan Auerhuhn Tetrao urogallus im Schwarzwald: Ein integratives Konzept zum Erhalt einer überlebensfähigen Population. Vogelwelt 2013, 134, 29–41. [Google Scholar]
- Graf, R.F.; Mathys, L.; Bollmann, K. Habitat assessment for forest dwelling species using LiDAR remote sensing: Capercaillie in the Alps. For. Ecol. Manag. 2009, 257, 160–167. [Google Scholar] [CrossRef]
- Bollmann, K.; Mollet, P.; Ehrbar, R. Das Auerhuhn Tetrao urogallus im Alpinen Lebensraum: Verbreitung, Bestand, Lebensraumansprüche und Förderung. Vogelwelt 2013, 134, 19–28. [Google Scholar]
- Russo, D.; Cistronec, L.; Jones, G. Emergence time in forest bats: The influence of canopy closure. Acta Oecol. 2007, 31, 119–126. [Google Scholar] [CrossRef]
- Napal, M.; Garin, I.; Goiti, U.; Salsamendi, E.; Aihartza, J. Habitat selection by Myotis bechsteinii in the southwestern Iberian Peninsula. Ann. Zool. Fennici 2010, 47, 239–250. [Google Scholar] [CrossRef]
- Ewald, M.; Dupke, C.; Heurich, M.; Müller, J.; Reineking, B. LiDAR remote sensing of forest structure and GPS telemetry data provide insights on winter habitat selection of European roe deer. Forests 2014, 5, 1374–1390. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | 2009 | 2012 |
|---|---|---|
| Camera | UltraCamXp | DMC II 140–006 |
| Panchromatic/color lens focal length | 100/33 mm | 92 mm |
| Resolution | 20 cm | 20 cm |
| Overlap | 60%/30% | 60%/30% |
| Image type | Digital color infrared (RGB NIR) | Digital color infrared (RGB NIR) |
| Angle-of-view from vertical, cross track (along track) | 55° (37°) | 50.7° (47.3°) |
| No. of stripes in the block file | 3 | 6 |
| No. of images | 23 | 48 |
| Flight height | 3890 m | 2850 m |
| Flight date | 23.05.2009 | 01.08.2012 |
| Settings eATE |
| Minimum images: 2; Maximum images: 2; Overlap min.: 50%; Correlator: NCC; Window size: 13; Coefficient start/end: 0.2/0.5; Interpolation: Spike; Point threshold: 5; Search window: 50; Blunder Type: PCA; St. Dev. Tolerance: 3; LSQ Refinement: 2; Edge constraint: 3; Reverse matching tolerance: 1; Smoothing: Low; Low contrast: Yes; Stop at pyramid layer: 0; Point sampling distance: 1; Pixel block size: 100; Most nadir: Yes; Gradient threshold: 0; Premier correlation band: 4; Use all spectral data: Yes; create radiometric layer: No |
| Settings SGM |
| Band: G; Last pyramid layer: 1 or 2; Disparity Difference: 1; Urban processing: 0; Keep vertical surfaces: Y; Thinning: Mild |
| Variable | Characteristics | Source | Input Format in Ctree |
|---|---|---|---|
| Gap size | Area (m2) | Automated mapping, Visual interpretation | numeric |
| Height of the surrounding forest | 1 = Low forest (LF < 8 m) | Automated mapping | factor |
| 2 = High forest (HF ≥ 8 m) | |||
| Shadow occurrence | 0 = none | Visual interpretation | factor |
| 1 = complete | |||
| 2 = partial | |||
| Slope (degree) | 1 = plane (0°–10°) | DEM50 (LGL) | factor |
| 2 = strongly inclined or steep (10°–20°) | |||
| 3 = very steep (>20°) | |||
| Aspect | Easting (sine of aspect) | DEM50 (LGL) | numeric |
| Northing (cosine of aspect) | |||
| Gap type (gap location) | 0 = inner forest stand, | Visual interpretation | factor |
| 1 = on storm throw | |||
| 2 = on a forest road | |||
| 3 = next to open forest | |||
| 4 = on a skidding trail | |||
| 5 = next to a road or a skidding trail |
| Producer’s Accuracy | User’s Accuracy | Producer’s Accuracy | User’s Accuracy | Kappa | Overall Accuracy | |
|---|---|---|---|---|---|---|
| OF | OF | DF | DF | with 95% CI | ||
| 2009 | 0.92 | 0.92 | 0.92 | 0.92 | 0.85 | 0.92 |
| 2012 | 0.87 | 1.00 | 1.00 | 0.85 | 0.85 | 0.92 |
| Visual Reference | ||||||
|---|---|---|---|---|---|---|
| 2009 | 2012 | |||||
| Automated Mapping | “Non-Gap” | Gap | Total | “Non-Gap” | Gap | Total |
| “Non-gap” | 166 | 31 | 197 | 164 | 63 | 227 |
| Gap | 3 | 166 | 171 | 7 | 167 | 174 |
| Total | 171 | 197 | 368 | 171 | 230 | 401 |
| Producer’s Accuracy | User’s Accuracy | Producer’s Accuracy | User’s Accuracy | Kappa | Overall Accuracy | |
|---|---|---|---|---|---|---|
| Gap | Gap | “Non-gap” | “Non-gap” | with 95% CI | ||
| 2009 | 0.84 | 0.97 | 0.97 | 0.84 | 0.80 | 0.90 |
| 2012 | 0.72 | 0.96 | 0.96 | 0.73 | 0.66 | 0.82 |
| Automated Mapping | Visual Interpretation | ||||
|---|---|---|---|---|---|
| 2009 | 2012 | ||||
| “Non-Gap” | Gap | “Non-Gap” | Gap | ||
| LF | “Non-gap” | 17 | 8 | 32 | 22 |
| Gap | 2 | 112 | 2 | 122 | |
| HF | “Non-gap” | 149 | 23 | 132 | 41 |
| Gap | 3 | 54 | 5 | 45 | |
| Producer’s Accuracy | User’s Accuracy | Producer’s Accuracy | User’s Accuracy | Kappa | Overall Accuracy | ||
|---|---|---|---|---|---|---|---|
| Forest Height Class | Gap | Gap | “Non-gap” | “Non-gap” | with 95% CI | ||
| 2009 | LF | 0.93 | 0.98 | 0.89 | 0.68 | 0.73 | 0.93 |
| HF | 0.70 | 0.98 | 0.98 | 0.87 | 0.73 | 0.88 | |
| 2012 | LF | 0.85 | 0.98 | 0.94 | 0.59 | 0.93 | 0.86 |
| HF | 0.52 | 0.96 | 0.96 | 0.59 | 0.84 | 0.79 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zielewska-Büttner, K.; Adler, P.; Ehmann, M.; Braunisch, V. Automated Detection of Forest Gaps in Spruce Dominated Stands Using Canopy Height Models Derived from Stereo Aerial Imagery. Remote Sens. 2016, 8, 175. https://doi.org/10.3390/rs8030175
Zielewska-Büttner K, Adler P, Ehmann M, Braunisch V. Automated Detection of Forest Gaps in Spruce Dominated Stands Using Canopy Height Models Derived from Stereo Aerial Imagery. Remote Sensing. 2016; 8(3):175. https://doi.org/10.3390/rs8030175
Chicago/Turabian StyleZielewska-Büttner, Katarzyna, Petra Adler, Michaela Ehmann, and Veronika Braunisch. 2016. "Automated Detection of Forest Gaps in Spruce Dominated Stands Using Canopy Height Models Derived from Stereo Aerial Imagery" Remote Sensing 8, no. 3: 175. https://doi.org/10.3390/rs8030175
APA StyleZielewska-Büttner, K., Adler, P., Ehmann, M., & Braunisch, V. (2016). Automated Detection of Forest Gaps in Spruce Dominated Stands Using Canopy Height Models Derived from Stereo Aerial Imagery. Remote Sensing, 8(3), 175. https://doi.org/10.3390/rs8030175