1. Introduction
Unmanned aerial vehicles (UAV), as a flexible aerial photography platform, have been widely used in many applications, such as agriculture, water conservation, geophysical exploration, mapping, 3D reconstruction, and disaster relief [
1,
2,
3,
4,
5,
6,
7,
8]. The ability to obtain high-resolution images makes large-scale mapping possible. As a supplementary photogrammetry platform for satellite and traditional aerial photogrammetry systems, low-altitude UAV has several advantages, such as low altitude, low speed (for a low-altitude aerial photography system, high speed will result in a blurred image), low cost, flexible and simple operation, and high-resolution images [
9]. However, UAV has problems that differ from those of the flight platform of traditional photography. Generally, the tilt angle of the images for a traditional aerial photogrammetry platform is not more than 3°, but for a low-altitude UAV platform, the typical unstable flight attitude may lead to a large rotation angle in photography. For example, a light and small UAV and an unmanned airship platform are not as reliable as the traditional aerial photography system, and are more likely to be affected by wind and other weather factors, the rotation angle may be increased to 10° or even more (for the airship platform) [
1,
2]. These issues seriously affect the data processing and application of the UAV photogrammetry system.
Automated data processing in traditional aerial photogrammetry is relatively developed. In recent years, more software packages have been designed and developed to fit UAV images (e.g., Pix4D, Photo Modeler, VirtuoZo v3.6 [
10], and AgiSoft Photoscan [
11,
12]). Image matching is a key step in data processing of aerial photogrammetry images. Feature extraction methods, which were proposed by Förstner [
13] and Harris [
14], are widely used for traditional aerial images to obtain precision tie points. Least squares matching is employed to improve the precision of tie points (0.1 pixel) [
15]. Certain factors, including large number, small frame, and large rotation angles of UAV images, cause difficulties in automatic tie point matching. The Scale Invariant Feature Transform (SIFT) [
16,
17,
18,
19,
20,
21] match algorithm is widely adopted for UAV image matching to generate a sufficient number of tie points. To improve the result of SIFT, Random Sample Consensus (RANSAC) [
10,
22] algorithm is used to remove erroneous matching points. Ai Mingyao proposed the BAoSIFT matching algorithm to improve the SIFT with block feature extraction to generate more even distribution of tie points [
10].
The image quality and accuracy of aerial triangulation (AT) are the key points of applying the remote sensing images acquired by UAVs. In this paper, the stable imaging issues of low-altitude UAV photogrammetry systems mainly focused on are the large rotation angles of the images caused by the unstable flight attitude of the flying platform and the effects of the rotation angles on the data processing and accuracy of the results. A large rotation angle of photogrammetry will lead to poor image ground resolution, low precision of the matching result, poor precision of AT, and low accuracy of the stereo model. The complex relationship among rotation angles (roll, pitch, and yaw), image quality, ground resolution, overlaps, precision and distribution of tie points, accuracy of AT, and stereo model is discussed and analyzed in this paper. A low-cost three-axis stabilization platform for a low-altitude unmanned airship photogrammetry system, which works with a GNSS/IMU system and a simple mechanical structure, is used to improve the pose of images. Experiments confirm that the stabilization platform can help the isolation swing of the flight platform and improve the quality of images and the precision of AT.
The issues of large rotation angle of low altitude UAV images are discussed and analyzed in
Section 2. The structure and workflow of the proposed three-axis stabilization platform, and the experimental datasets from different flying platforms with and without stabilization are introduced in
Section 3.
Section 4 describes the experimental results of the test flight of the proposed three-axis stabilization platform and the accuracy of different data. Conclusions and topics for further research are given in
Section 5.
3. Methodology and Data Acquisition
3.1. Methodology
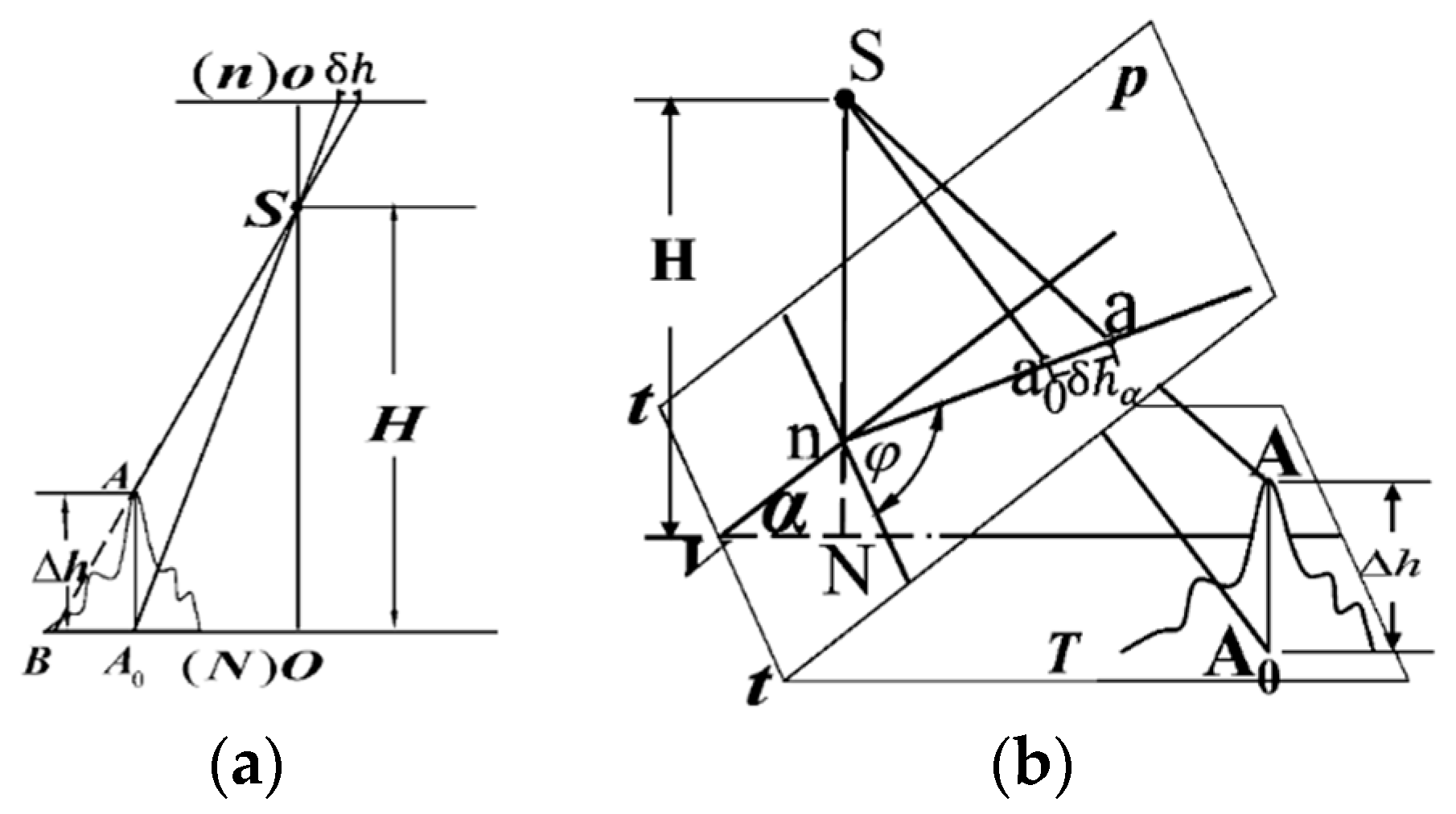
In a traditional aerial photography system, the stabilization platform is widely used to isolate the swing of the aerial photography platform (springs are used to reduce the high-frequency vibration) [
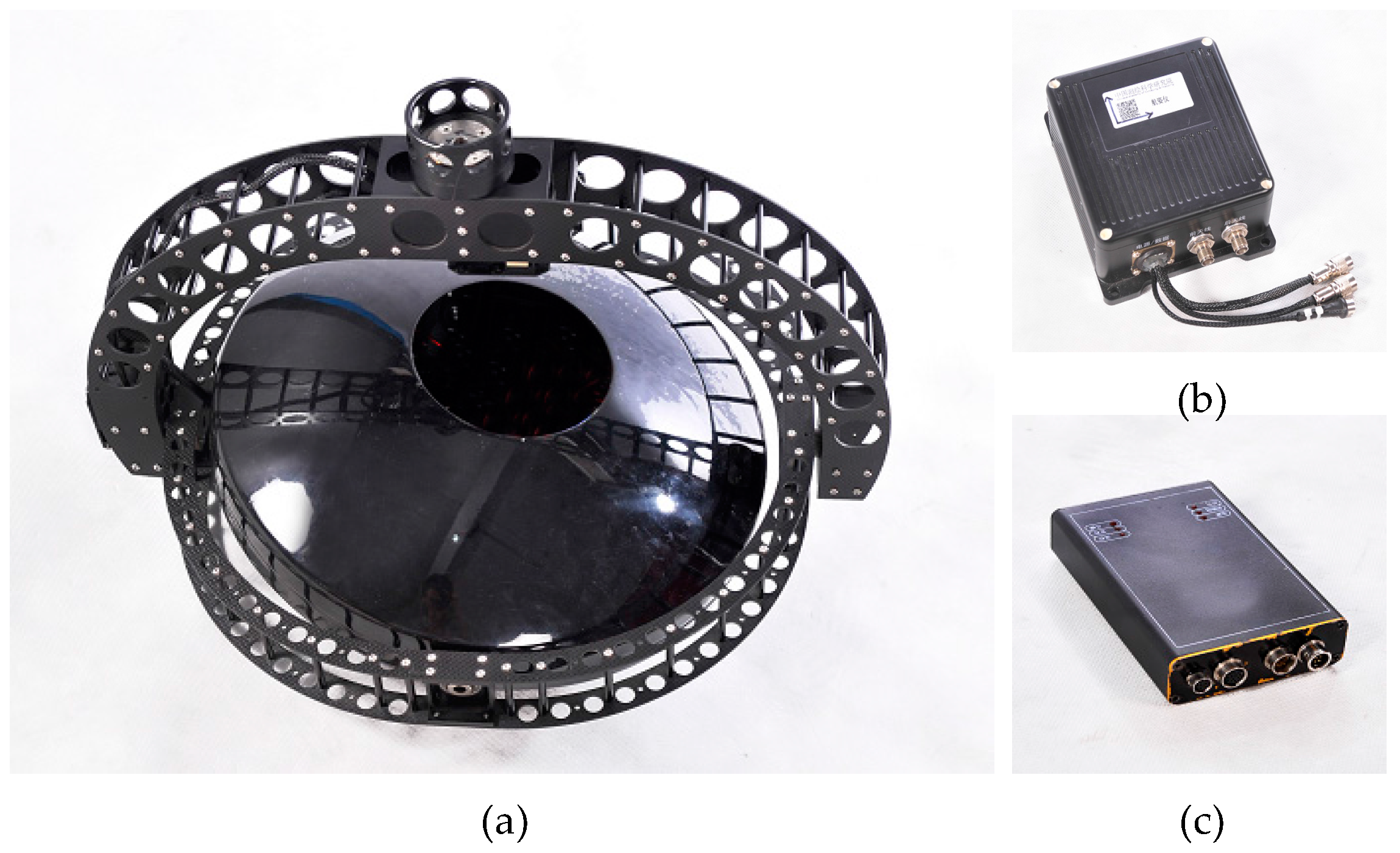
7]. However, many factors need to be considered in a UAV system, such as size, weight, installation requirements, power consumption, precision, payload, and cost. Thus, a simple three-axis stabilization platform (
Figure 5a), which is controlled with a proportion integration and differentiation (PID) algorithm, is used in this study. The system includes an integrated GNSS/ inertial navigation system (INS) (
Figure 5b) that works with a triaxial gyroscope and dual-GNSS device, which is a mechanical rotating platform that can rotate with three digital rudders; this platform is controlled by a microcomputer (
Figure 5c) with the PID program.
In the inertial navigation system, which is a mature product, the two GNSS devices, which are installed in the flight direction at a distance of approximately 1.5 m, are used to improve the precision of the heading angle measured by the gyroscope. The precision of the heading angle is 0.2°, and the precision of roll and pitch angles are 0.5°. The GNSS device which is installed on the front is used as the main station, the precision of position is 2.0 m. The rudders are connected with the microcomputer by serial ports. The three rudders are numbered for independent control command, and the rotating accuracy of rudders is 0.3°. The working angle is −35° to 35° for roll, pitch, and yaw rudders. The weight of the entire system is 4 kg, and the system can carry a 10 kg payload and is powered with a 12 V 5000 mAH lithium battery. The system was designed and manufactured by the Chinese Academy of Surveying and Mapping and for installation on an unmanned airship aerial photogrammetry platform.
3.2. Experimental Test Area 1: Baoding
The UAV remote sensing platform used in the experiments of dataset 1 is a low-altitude unmanned airship, which is composed of a helium balloon, an image sensor, a power compartment with two gasoline aviation engines, a small commercial programmable flight management system, and a ground monitoring system. The flight speed of the platform is approximately 50 km/h, and the payload is roughly 25 kg. The camera system is mounted on the proposed three-axis stabilization platform. The inertial navigation system, which works with two GNSS systems, can record the position of each exposure. The imaging sensor, which is mounted on the platform, is a digital camera with a fixed focal length of 35.4621 mm and is calibrated by the provider. The image format is 6000 × 6000 pixels (each pixel is approximately 6.4 μm on the sensor).
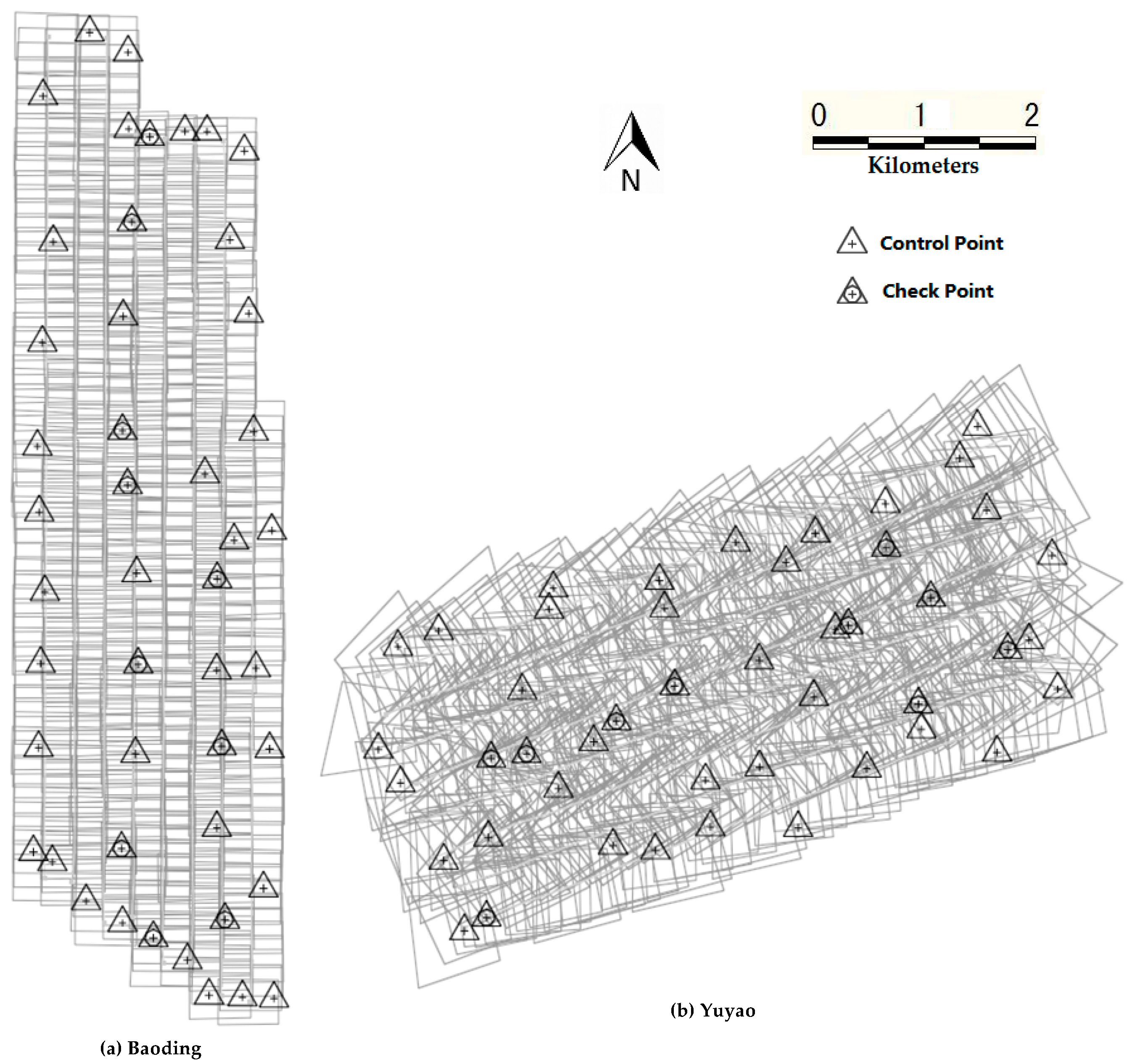
In September 2014, 461 images were acquired by the system with a stabilization platform, covering an urban area of Baoding, Hebei Province in China, where the terrain is significantly flat such that the ground elevation varies from 10 to 25 m and the highest object on terrain is less than 20 m. As shown in
Figure 6a, the images belong to eight strips in the north–south direction with a flight route of 6.5 km and a flight span of approximately 2 km. The area is approximately 13 km
2, and the images were taken at an average altitude of 250 m above ground level, which corresponds to a vertical photography GSD of 4.5 cm. The forward overlap of the images is approximately 70% and the side overlap is approximately 50%. The block contains 45 full natural GCPs. A total of 35 GCPs are used as control points for aerial triangulation processing, whereas the remaining 10 points are used as check points. All the points are surveyed by the GPS real-time kinematic (RTK) method, and the plane and elevation precision of the GCPs is 0.02 m.
3.3. Experimental Test Area 2: Yuyao
The flying platform used in the experiments of dataset 2 is the same low-altitude unmanned airship used in the experiments of dataset 1. The only difference between the flights of the two experiments is that the same camera system works without the three-axis stabilization platform and is fixed directly below the flight platform. The flight management system provided the approximate position and pose of each exposure.
In May 2014, 376 images were acquired by the system without a stabilization platform, covering an urban area of Yuyao, Zhejiang Province in China, where the terrain is significantly flat such that the ground elevation varies from approximately 3 to 15 m and the highest object on the terrain is less than 15 m. As shown in
Figure 6b, the images belong to eight strips in the east-west direction with a flight route of 5.0 km and a flight span of roughly 2.5 km. The area is approximately 10.5 km
2, and the images are taken at an average altitude of 250 m above ground level, which corresponds to a vertical photography GSD of 4.5 cm. The forward overlap of the images is approximately 70% and the side overlap is approximately 50%. The block contains 44 full natural GCPs. 34 of these GCPs are used as control points, whereas the remaining 10 points are utilized as check points. All the points are surveyed by using the GPS RTK method, and the plane and elevation precision of the GCPs is 0.02 m.
3.4. Experimental Test Area 3: Zhang Jiakou Block1 and Block2
The image dataset was acquired by a fixed-wing UAV that works with a programmable flight- management system as shown in
Figure 7b. The remote imaging sensor is a digital camera with a fixed focal length of 51.7568 mm, which is calibrated by the UAV system provider. The image format is 7168 × 5240 pixels (each pixel is approximately 6.4 μm in the sensor).
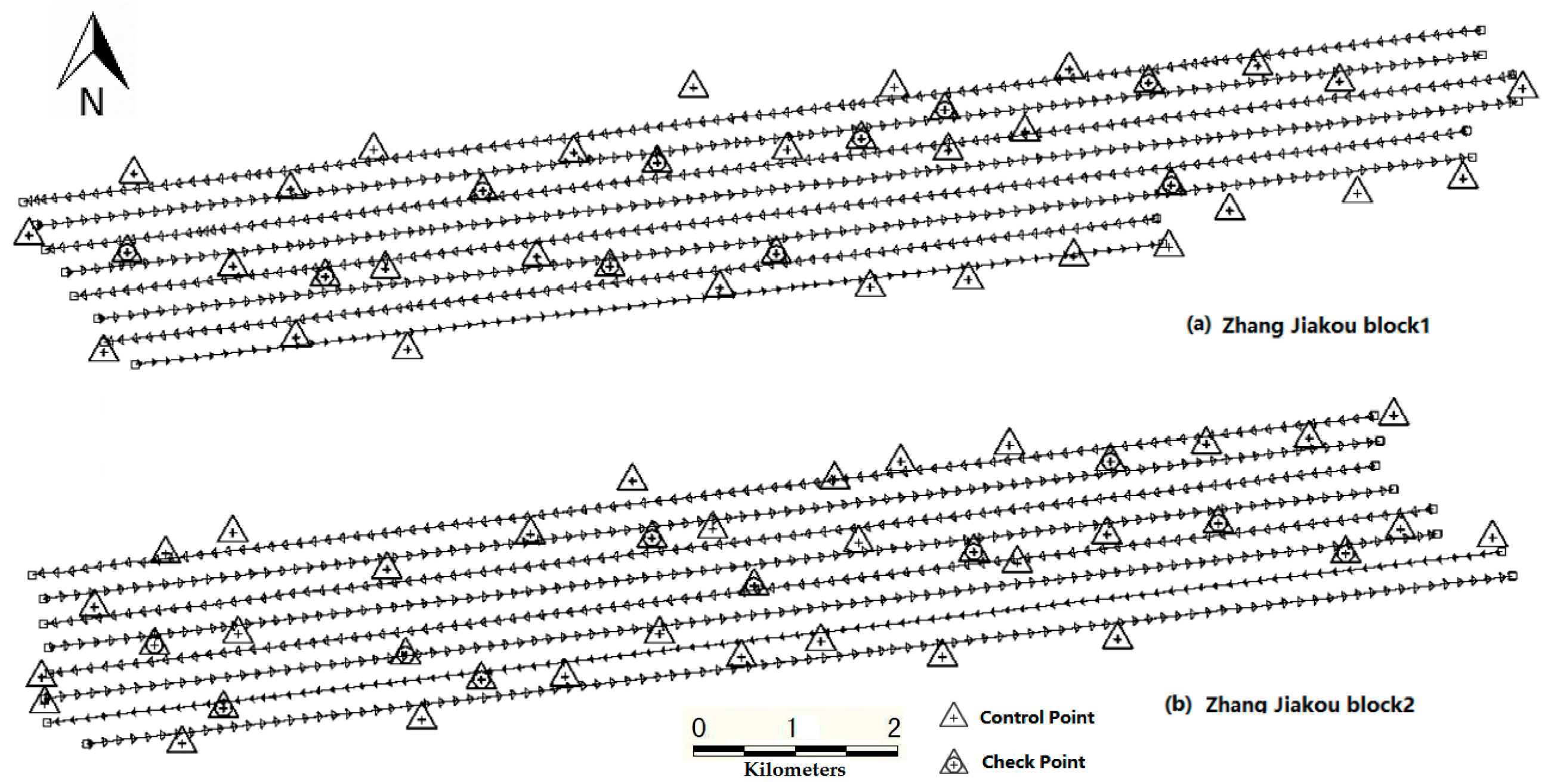
The images of block1 and block2 were acquired by the same fixed-wing UAV system with the same camera system in the two flights. As shown in
Figure 8a,b, the dataset block1 covers a rectangular area of 12 km × 2.5 km, and the area is approximately 30 km
2. A total of 778 images from eight strips in the east-west direction were taken, which included 38 natural GCPs. Twenty eight of them are used as control points, and the remaining 10 are utilized as check points. The dataset block2 contains 764 images that belong to the other eight strips that are close to block1. The area is approximately 30 km
2. It contains 39 natural GCPs, and 29 of these GCPs are used as control points for data processing; the others are used as check points. The images of block1 and block2 are taken at an average altitude of 700 m above ground level in a hilly area of Zhang Jiakou, Hebei Province in China, where the ground elevation varies from 870 to 950 m and the highest object on the terrain is less than 10 m. The ground resolution is approximately 8.7 cm. The forward overlap of the images is approximately 70% and the side overlap is approximately 50%. The difference between the two blocks is the flight attitude of the UAV platform. In block1, the light fixed-wing UAV system is influenced by the wind; the max roll and pitch angle increase to 10° (the max roll and pitch angle for block2 is smaller than 4°). All the GCPs are surveyed by using the same GPS RTK method, and the plane and elevation precision of the GCPs is 0.02 m.
Table 4 shows the basic parameters of the experimental datasets.
4. Results and Discussion
In the following sections, the experimental datasets are analyzed to document the importance of stable imaging for a UAV photogrammetry system. The Yuyao and Baoding datasets, which were acquired by the same flight platform with the same camera system, are employed to demonstrate the influence of rotation angle on image resolution, overlaps, distribution and accuracy of tie points, and precision of the AT and stereo model, and the results also indicate the feasibility and accuracy of the stabilization platform. To ensure objective and reliable results, the datasets from Zhang Jiakou, which were acquired by another fixed-wing UAV system with the same camera system, were also analyzed.
4.1. Image Quality and Overlaps with Rotation Angle
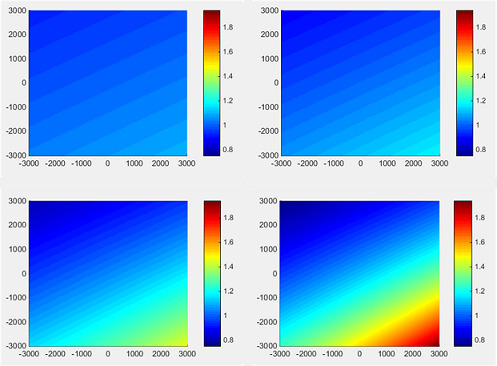
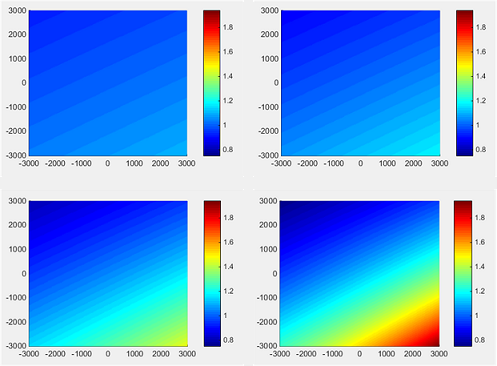
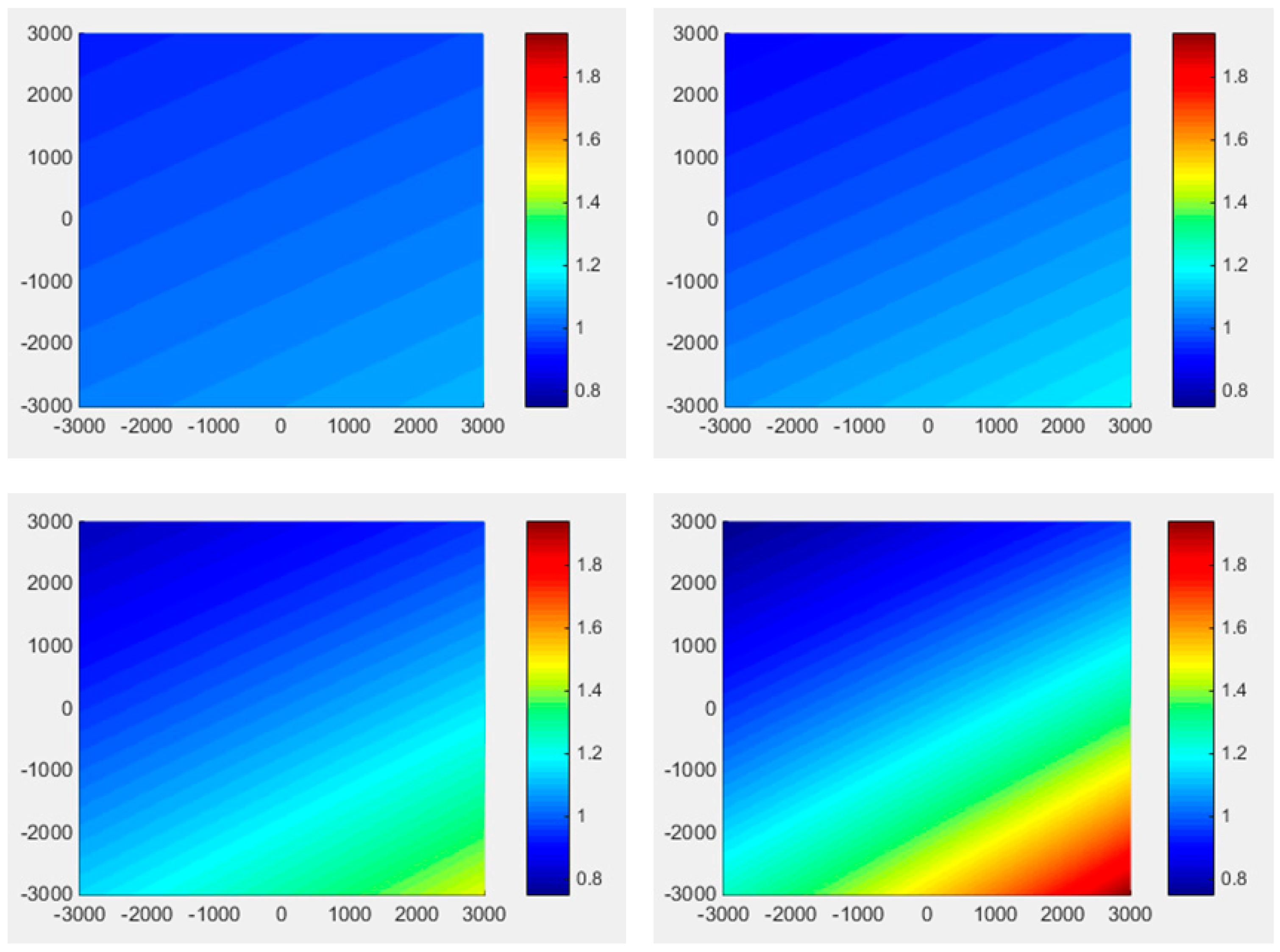
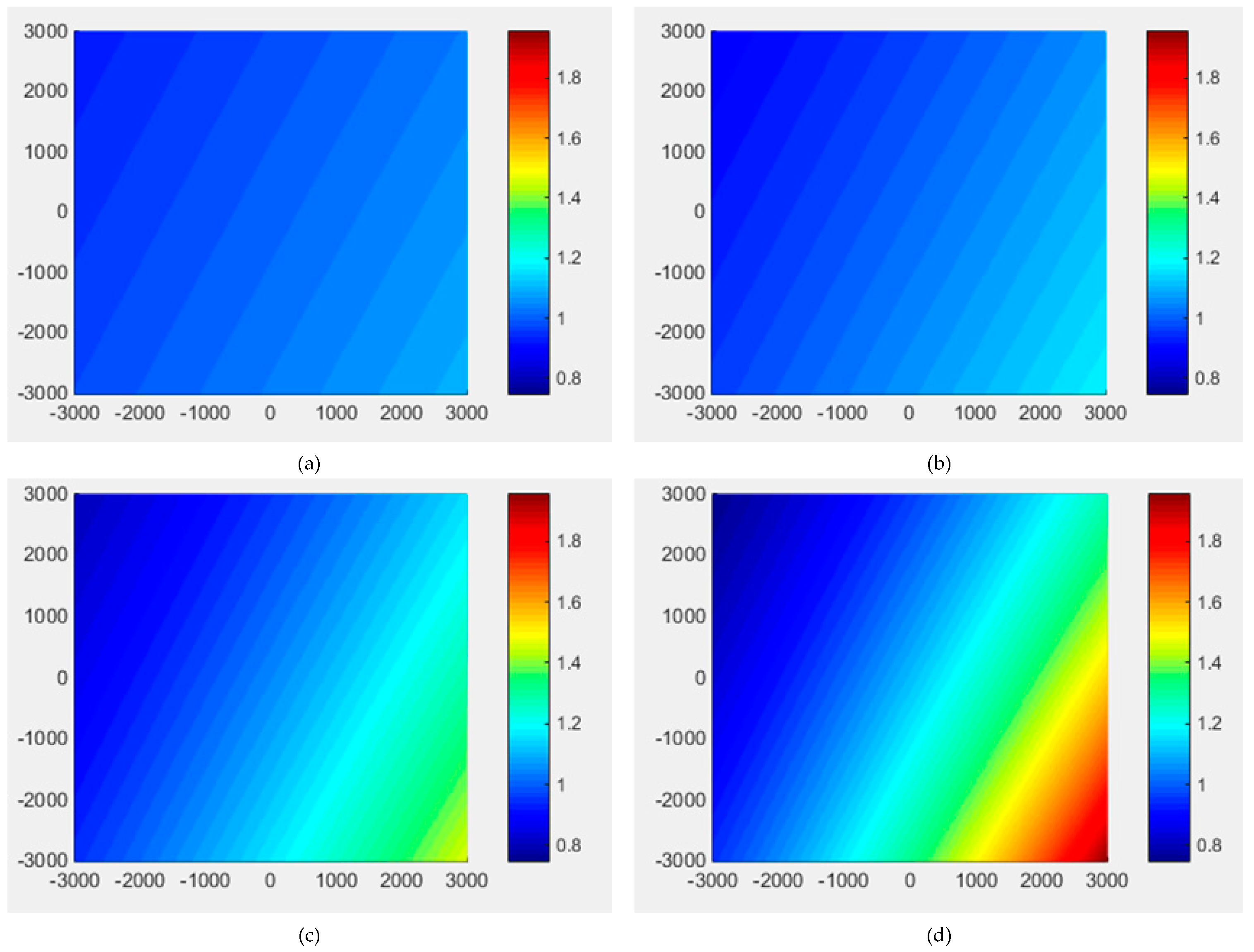
On the basis of the analysis in
Section 2.2, we determined that the rotation angle not only seriously effects the deformation of images, but also breaks the even distribution of image GSD, thereby leading to reduced image quality. To verify the result, two groups of continuous images from the Yuyao and Baoding experimental datasets which were obtained with and without the stable platform were adopted to demonstrate the difference of image quality.
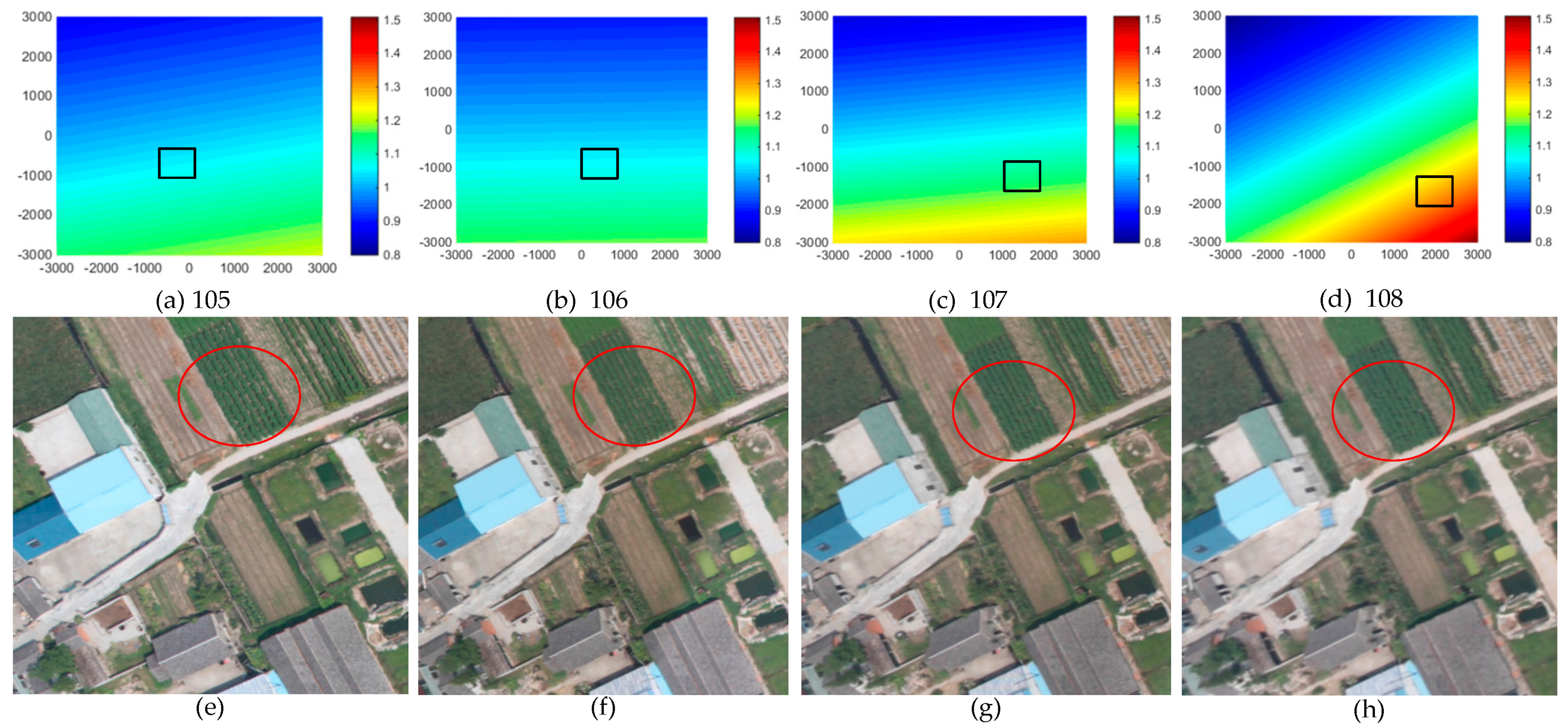
Figure 9 shows the GSD distribution of four continuous images and tile images of the same objects from the Yuyao dataset.
Figure 9a–d indicate the image GSD distribution of the four images, and
Figure 9e–h show the pictures highlighted by the small rectangles in
Figure 9a–d. The rotation angles for images “105” and “106” are close, and the difference in GSD is not highly significant. With increased rotation angles, the difference between GSD becomes more significant. The first most significant change in the images caused by the increasing of GSD is the size of the building; the sizes of the buildings in the image “108” are smaller than those of other images (all four images are shown in the same pixel scale, as the GSD is different, the size of the object is different). The deformation of the buildings are very clear and become more and more seriously deformed with the increasing of rotation angles and closing to the edge of images. Moreover, the texture quality of image “107” (as shown in the red circle) is not as good as those of images “105” and “106”. As the angle is increased to 7.4° (
) and 13.6° (
) in image “108,” the texture quality of the image decreased significantly as the increasing of image GSD and closing to the edge of the image, and its texture was not as clear as those of images “105” and “106”.
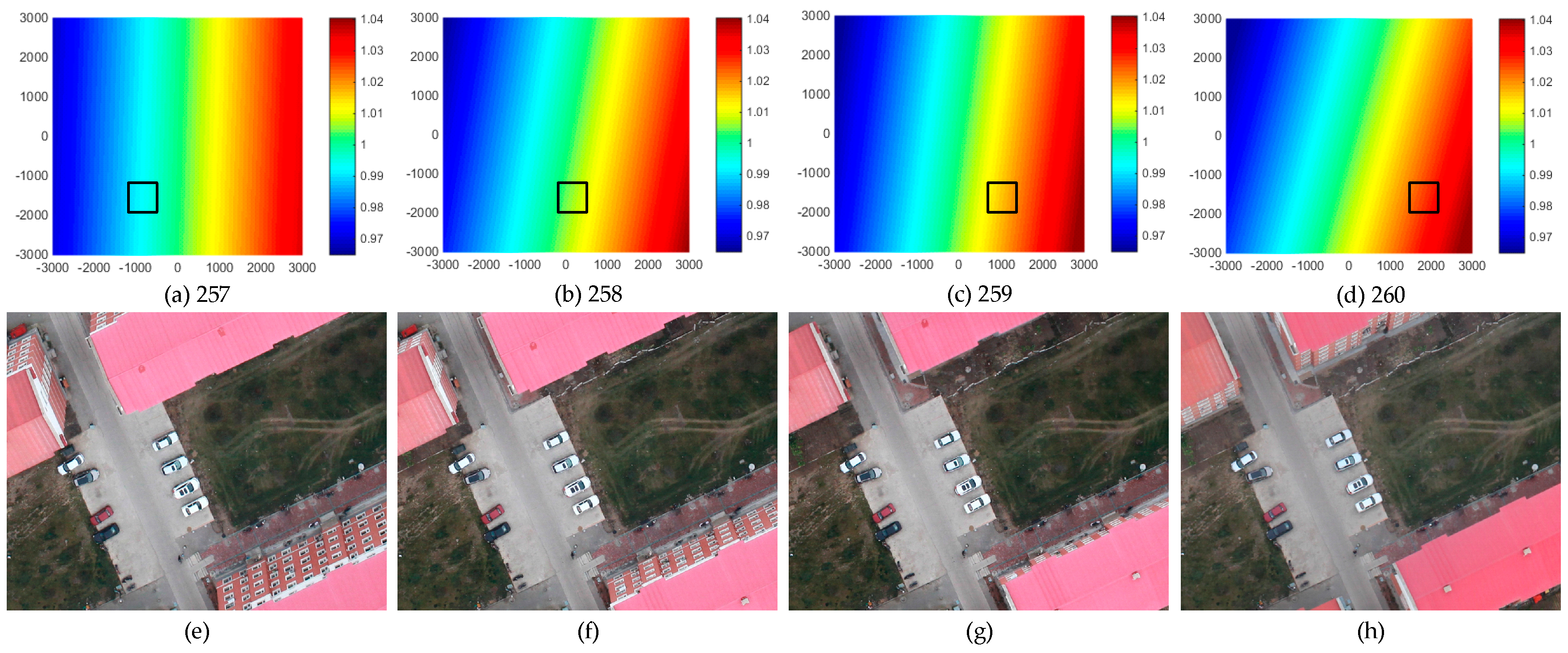
Figure 10 presents the continuous images from the Baoding experimental dataset, which were acquired with a stable imaging platform. The max rotation angles for the images are not worse than 3°, and the angle for most images is smaller than 2°. On the basis of the results of the analysis in
Section 2.2 and a comparison of the four images in
Figure 10,
Figure 10a–d indicates that the difference in the image GSD distribution of the four images is very limited, and the resolution of the continuous images acquired from different viewing angles almost did not exhibit any change.
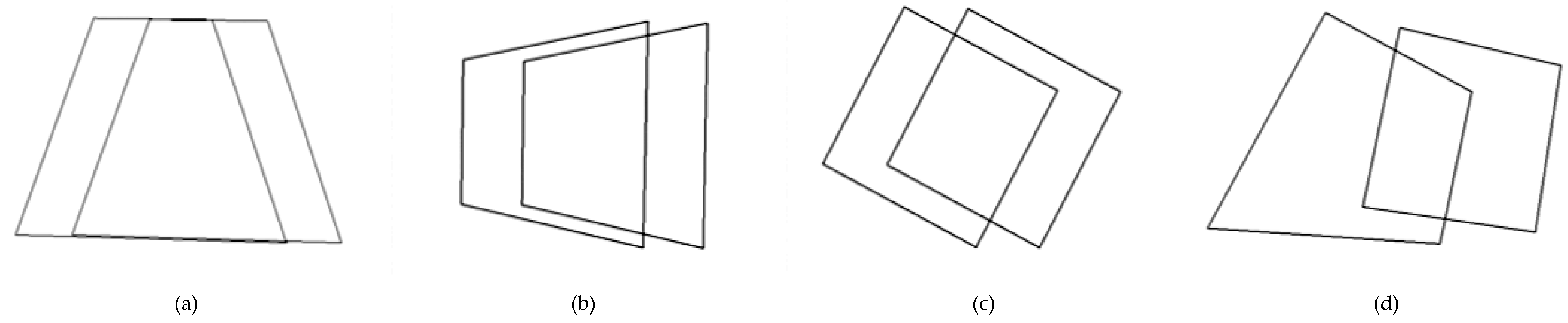
Image overlap is an important indicator of aerial photogrammetry. In traditional aerial photography, the overlap of aerial images can be estimated by using coverage width and the baseline length of two images without considering the image rotation angle. However, for a low-altitude UAV platform, the effect of the rotation angle on image overlap is so significant that it cannot be disregarded.
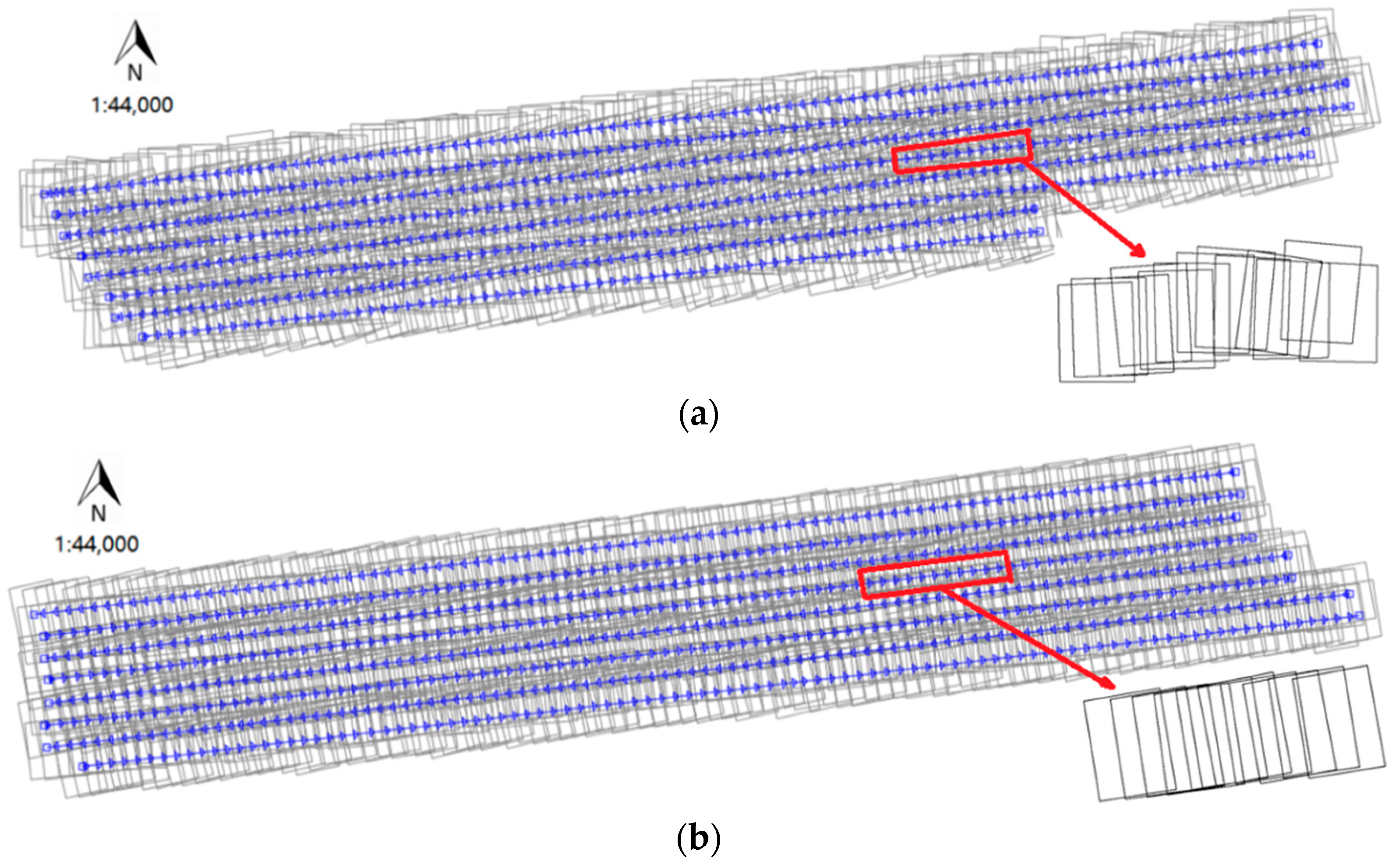
Figure 11 indicates the footprint views of the experimental dataset Zhang Jiakou block1 and block2. The enlarged view of block1 is not as orderly as that of block2 because of varying and rotation angles.
In this research, the area of the image footprint is used to calculate the overlap between images.
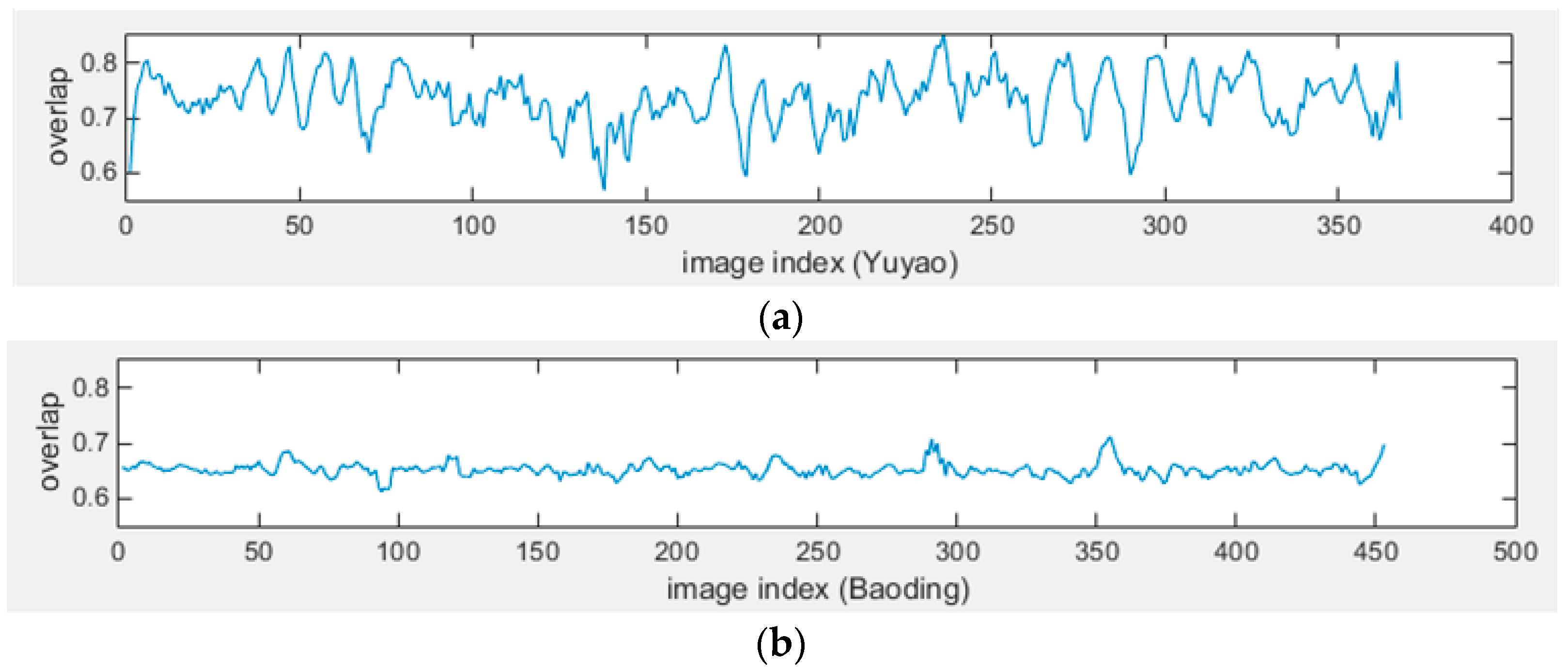
Figure 12 shows the statistical information of the image forward overlaps of Baoding and Yuyao.
Figure 12 indicates that the values of the horizontal axis are the indexes of the image pairs in the strip order. The values of the vertical axis are the overlaps of the image pairs. The designed forward overlap is approximately 70% for Yuyao and Baoding. However, the maximum forward overlap of the image acquired in Yuyao is 85%, whereas the minimum is 58%. In comparison, the forward overlap of the dataset from Baoding is only 65% to 72%. The curve fluctuation of Yuyao is more significant than that of Baoding, thereby indicating that image overlaps are influenced by the larger rotation angles of images.
4.2. Distribution and Accuracy of Tie Points
Generally, the precision of AT is affected by many factors, such as image quality and ground resolution, number and distribution of tie points, and overlaps between images. In this paper, the difference in the experimental datasets is the pose of images acquired by the UAV system. Large rotation angle photography results in different overlaps, numbers, and distribution of tie points.
Image measurements for AT of all experimental datasets are performed by Inpho MATCH-AT software with the same parameters. The
a priori standard deviations for the auto tie point observations are set at 2 μm.
Table 5 provides statistical information about the number, RMS, and sigma values of all the photogrammetric residuals after bundle adjustments for all experimental datasets.
Table 5 indicates that the number of tie points for each image is sufficient for exterior orientation processing. A comparison of the results of the datasets indicates that the results are highly consistent. The images with a smaller rotation angle generated more tie points. The statistical results of RMS and sigma 0 in
Table 5 also demonstrate that decreasing the image rotation angles (roll, pitch, and yaw) can improve the precision of the tie points.
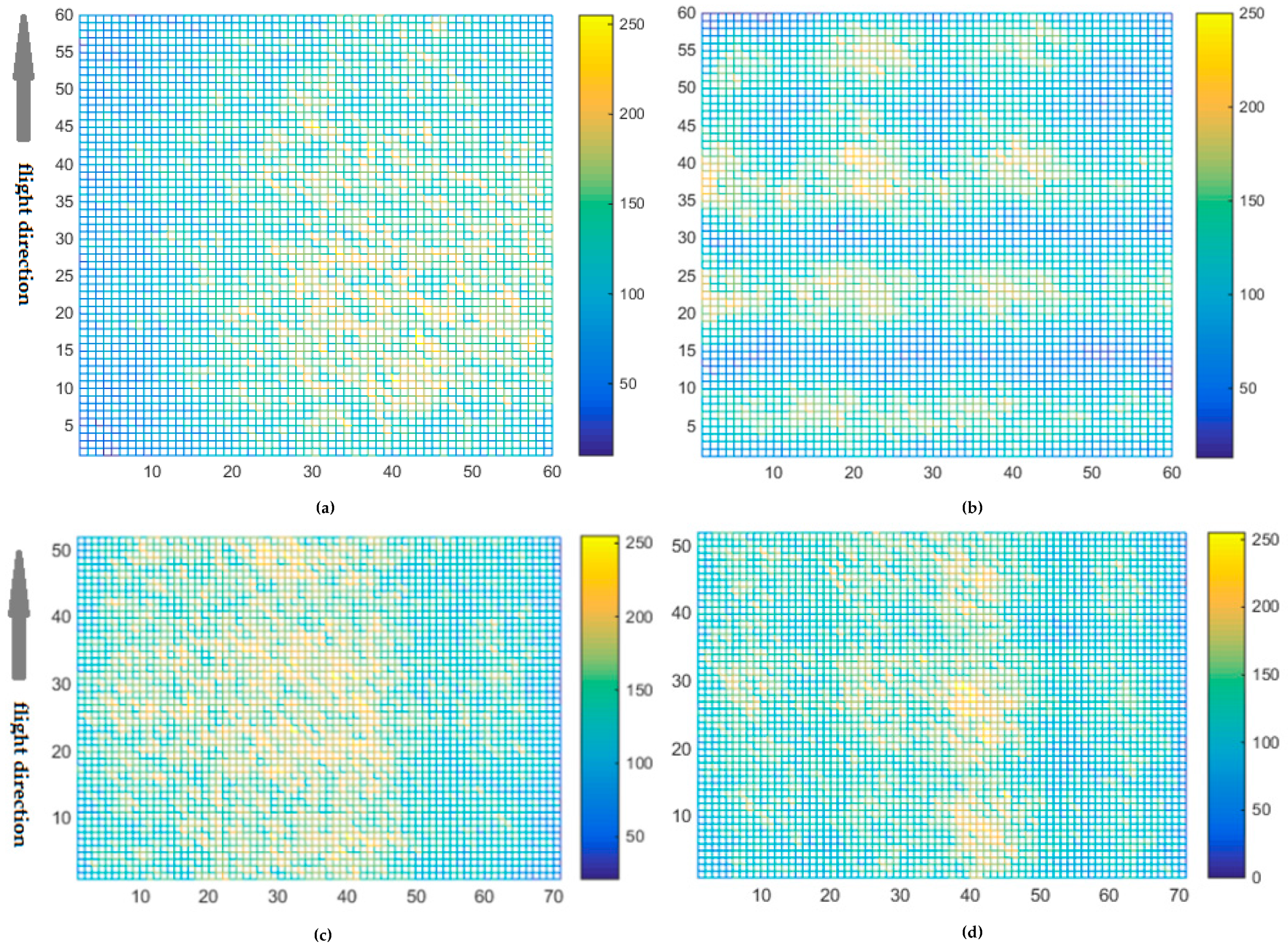
In this study, we added the numbers of tie points in all the images of one dataset to better analyze the distribution of tie points. We divided the image by using a small 100 × 100 pixel grid according to the image format size. Then, we counted the number of tie points of each grid. The tie point numbers of each small grid were normalized to (0–255) for visualization and to obtain an objective view of the different distributions of tie points because the image number of the datasets and the tie point density vary. The statistical results are presented in
Figure 13, which shows the distribution of tie points in different colors.
A comparison between
Figure 13a,b clearly indicates that the distribution of tie points in the Baoding dataset is more even than that in the Yuyao dataset. The MATCH-AT is a famous and popular software which performs well in the matching of tie points. As the software package uses LSM matching algorithm to improve the accuracy of the tie points, the image quality is recognized as a key factor that affects the number and accuracy of the matching result. However, as the analysis in the
Section 2, the optical effects, image deformation, and uneven distribution of GSD seriously affect the image quality, especially for the edges of the image, thereby resulting in an uneven distribution of matching results in different areas of the image. In the statistical data from Yuyao, the tie points are distributed mainly in the central part of the image, closer to the center of the image the greater density of tie points, and only a small portion of tie points distributed at the edges and corners of the image. However, the statistical distribution of the tie points in Baoding shows that tie points are evenly distributed in each part of the image. The result in
Figure 13c,d shows a similar view as that in
Figure 13a,b, which indicates that the rotation angle of photography will affect the distribution of the tie points. The following sections provide more detailed statistical results of AT.
4.3. Accuracy of Aerial Triangulation
The accuracy of AT is one of the most important factors in the application of the images acquired by the UAV photogrammetry system. To further demonstrate the effects of a large image rotation angle, detailed statistical results of AT for the four study areas are provided. The root-mean-square (RMS) values of GCPs and check points are presented in
Table 6. A comparison between Baoding and Yuyao, the statistical result demonstrates that the max error of GCPs and check points of Baoding is smaller than the result of Yuyao, the difference between the RMS values of GCPs and check points is even more significant. The RMS values of Yuyao are nearly twice as large as Baoding. The statistical results of Zhang Jiakou block2 is better than that of block1. However, the difference of rotation angle between Zhang Jiakou block1 and block2 is smaller than that between Yuyao and Baoding (difference of camera focal length is another factor), the difference of the max and RMS values of GCPs and check points between Zhang Jiakou block1 and block2 is not as significant as that between Baoding and Yuyao. Thus, the statistical result points out that the rotation angles of images have an effect on the precision of AT, and this effect becomes significant with the increasing of rotation angles of the images.
In this paper, the errors of control points and check points in different stereo models are calculated to demonstrate the effects of rotation angle on the precision of stereo models. We have classified all the images of dataset Yuyao to three classes in regards to their rotation angle (
and
< 3°,
and
> 8°, others), and calculated the errors of control points for all stereo models, and then calculate the RMS values of the errors in all stereo models for each rotation class. The statistical results are presented in
Table 7. The statistical result indicates that the accuracy of stereo models affected by the rotation angle of images and the errors in the stereo models with smaller rotation angle of images are better.
4.4. Effect of the Three-Axis Stabilization Platform
In the previous sections, the theoretical analysis in
Section 2 was verified by the results of the experimental datasets. In this study, the simple, low-cost three-axis stabilization platform was used to reduce this problem. The experimental result of Baoding demonstrated that this platform can improve the quality and precision of the images and the result, respectively.
To analyze the effect of the three-axis stabilization platform, the statistical results of the rotation angle for the images in Yuyao and Baoding are utilized, as shown in
Figure 12. The result of AT (three angle elements,
) is adopted to analyze the image rotation angles. Here, the value of
is replaced by the difference between the route angle and
. The datasets of Yuyao and Baoding are acquired by the same UAV platform with the same camera system, the difference is that the Baoding dataset is acquired with the three-axis stabilization platform. The statistical result of
Table 8 shows that the flight attitude of the unmanned airship platform is unstable (the camera system is mounted on the platform to work without a stabilization platform, and the camera swings with the flight platform). The average rotation angle reaches 8°, and the maximum rotation angle is larger than 15°. By contrast, the statistical result of the Baoding dataset is significantly better than that of the Yuyao dataset. The maximum rotation angle is less than 3°, and more than 90% of the rotation angles are less than 2°. Furthermore, a comparative analysis among the three rotation angles (
) in the Baoding dataset indicates that the precisions of
and
are nearly the same. However, the precision of
is better. Nearly two-thirds of
value is smaller than 0.5°, whereas the percentage for
and
is only 45.4% and 32.4%. This result is consistent with the precision of the inertial navigation system that works with two GNSS systems (the precision for the yaw angle is 0.2° and 0.5° for the roll and pitch, respectively). The result also confirms that the simple three-axis stabilization platform can effectively isolate the swing of the flight platform and improve the attitude of images.
5. Summary and Conclusions
Theoretical analysis of the optical effects, image deformation, GSD, overlaps, and stereo models of the images acquired by a low-altitude UAV photogrammetry system with a short fixed-focal length camera is provided in detail. The effects of rotation angles on image overlaps, the precision and distribution of tie points, and accuracy of AT and stereo models are discussed and analyzed. A simple three-axis stabilization platform is used to address the poor attitude issues of a low-altitude UAV platform. Four datasets are evaluated in the empirical part of this paper. Two of the datasets were acquired by the same UAV with the same camera with and without a stabilization platform, and the two other datasets were obtained by another light fixed-wing UAV.
Experimental results demonstrate that stable imaging is potentially significant for a low-altitude UAV aerial photogrammetry system. The large rotation of images will decrease image quality and serious the image deformation; it also results in poorer and uneven distribution of image ground resolution, irregular overlap between images and inconsistency of stereo models. These factors also affect the precision and distribution of tie points, thus affecting the accuracy of AT and stereo models. The statistical results of the datasets indicate that stable imaging for low-altitude UAVs can help improve the quality of aerial photography imagery and the accuracy of AT. For this reason, improving the attitude of images acquired by the low-altitude UAV flight platform requires further research attention. A stabilization platform is one solution to this problem. The precision of a stabilization platform does not need to be as high as that of a traditional aerial photography stabilization platform. The systems, which can control the rotation angle to within less than 3°, are sufficiently useful. A two-axis stabilization platform (for roll and pitch) is useful for most small and light UAVs, and can also help improve image attitude. Enhancing the anti-wind performance and developing a powerful flight management system are other effective ways to improve the stability of UAVs.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}