
Tree Root Automatic Recognition in Ground Penetrating Radar Profiles Based on Randomized Hough Transform

Abstract
:
1. Introduction
2. Materials and Methods
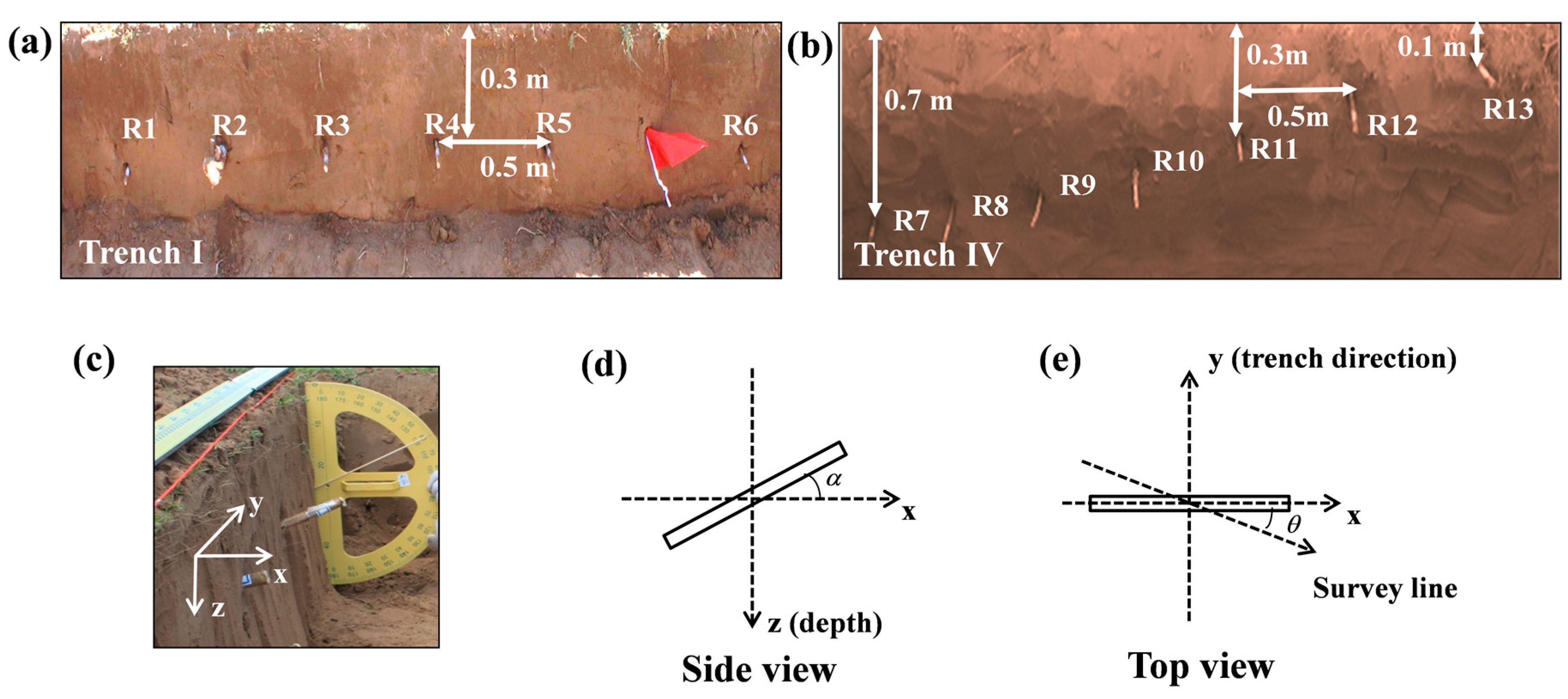
2.1. Data Collection
2.1.1. Controlled Experiments
2.1.2. In Situ Experiments
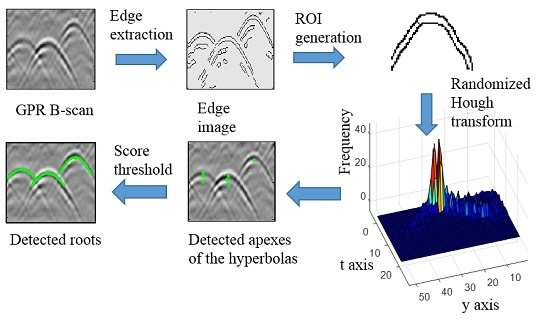
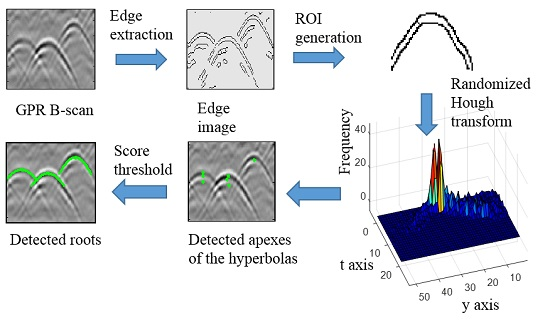
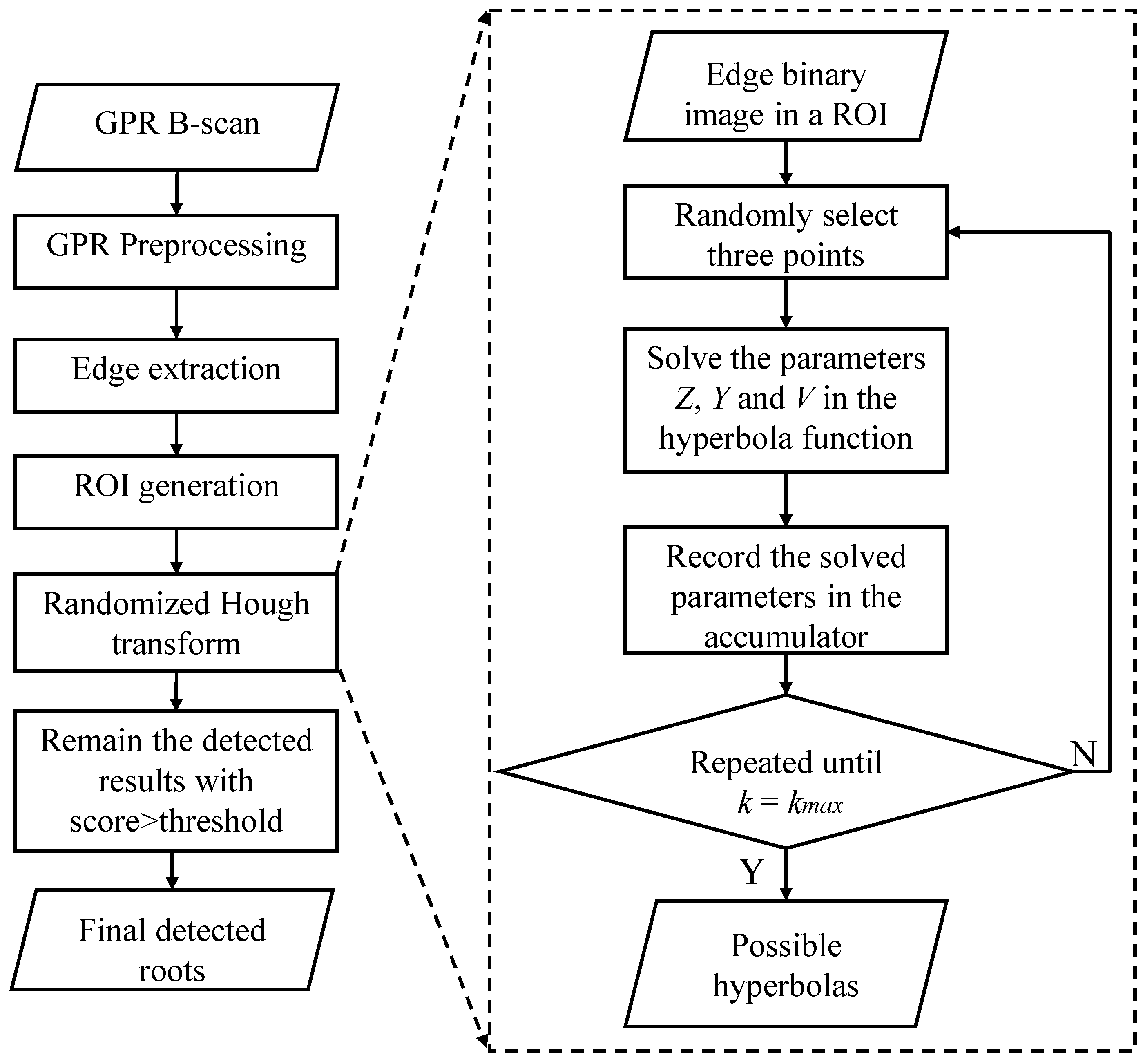
2.2. Automatic Root Signal Recognition Algorithm Based on RHT
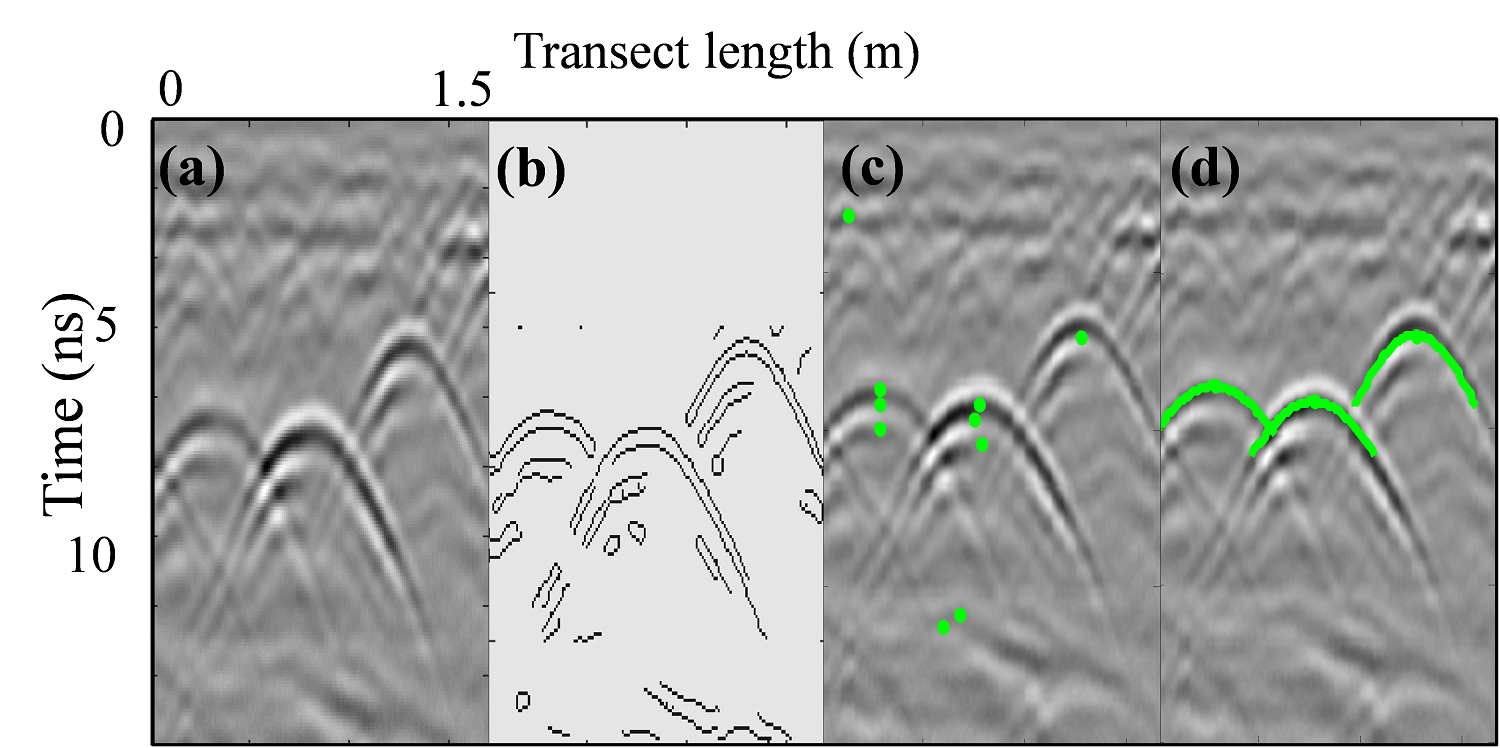
2.2.1. Edge Extraction and Region of Interest (ROI) Generation
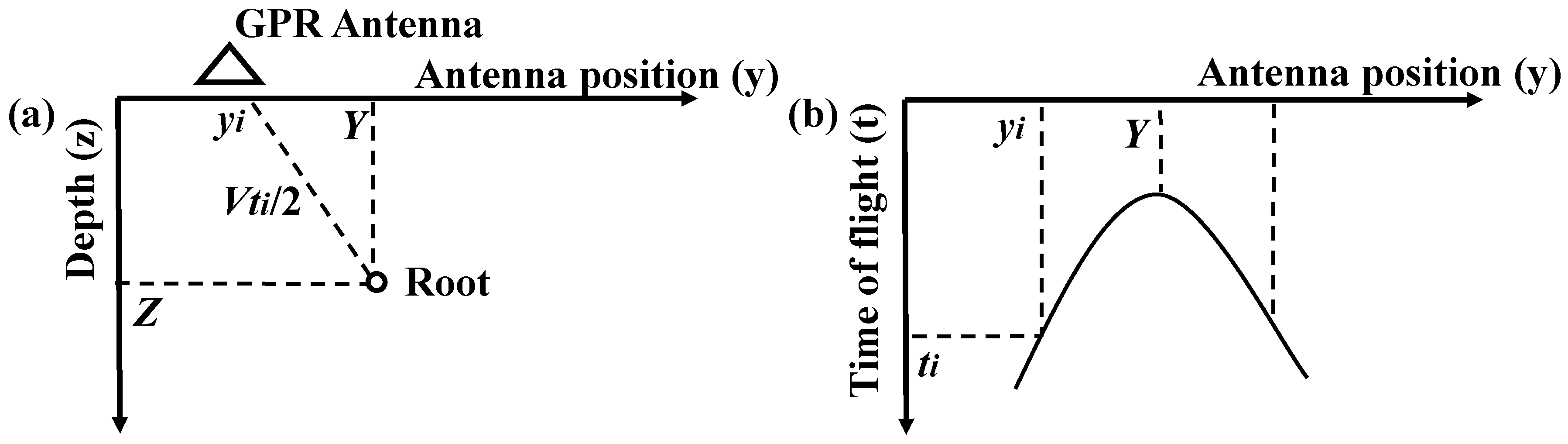
2.2.2. Recognition of Hyperbolas Using Randomized Hough Transform (RHT)
2.2.3. Target Determination
2.2.4. Accuracy Evaluation
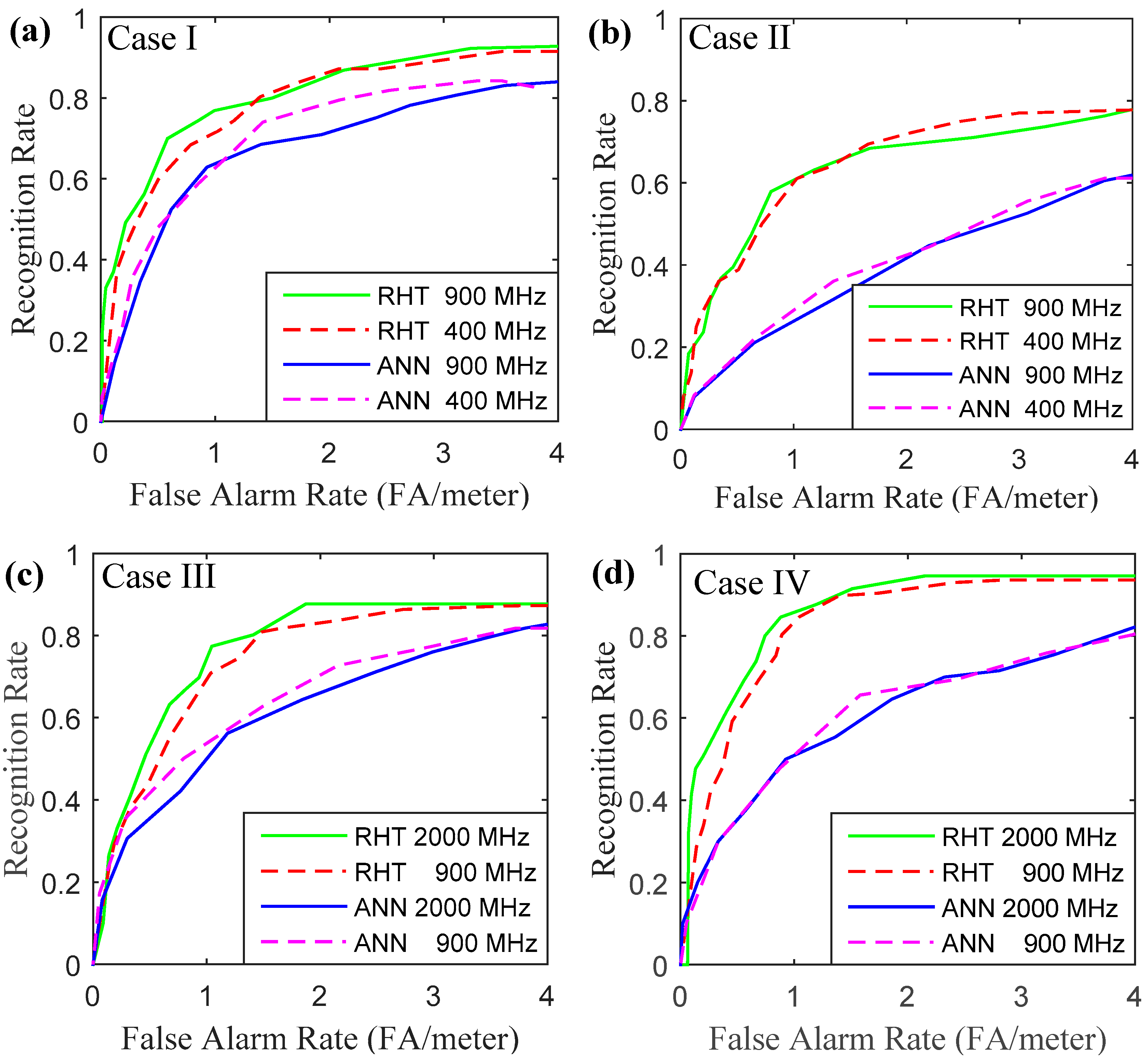
2.3. Comparison with ANN
3. Results
3.1. Controlled Experiment Results
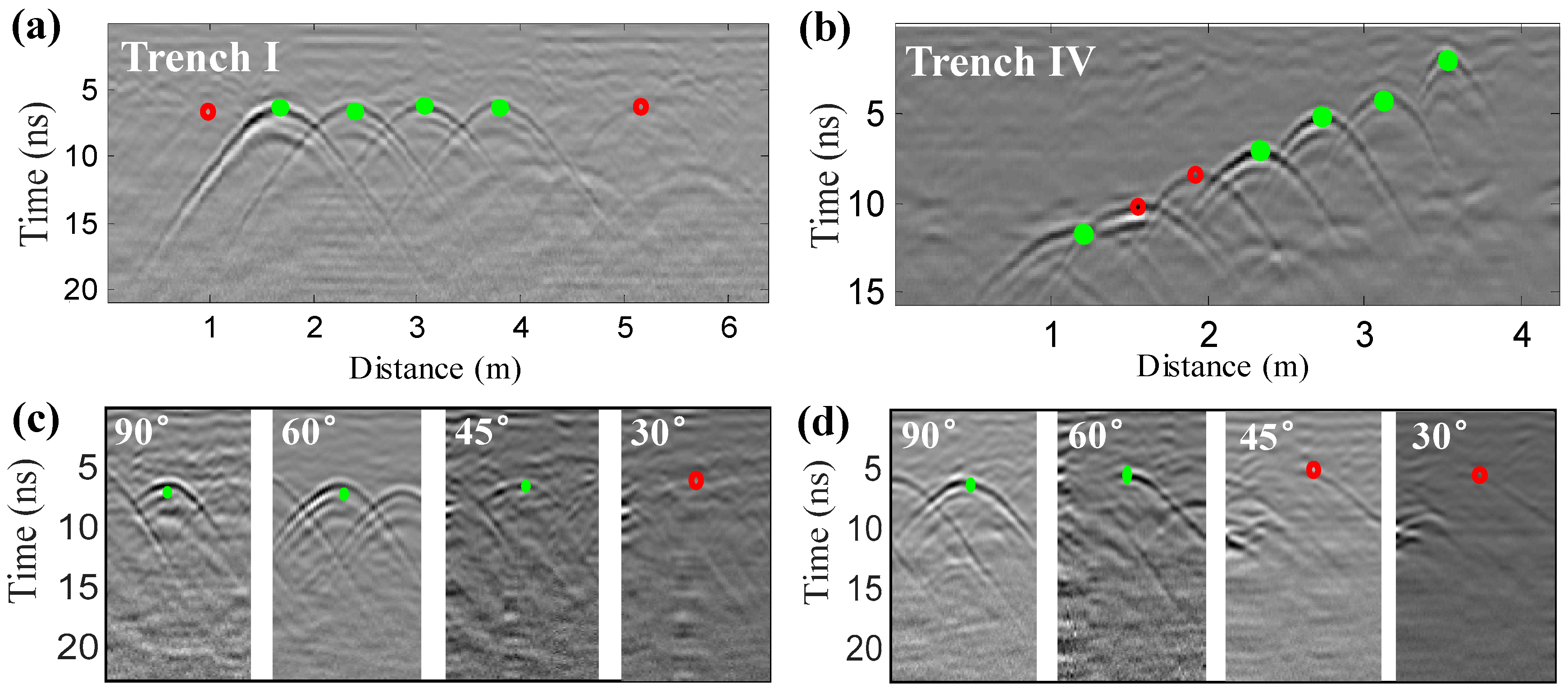
3.1.1. Roots with Different Diameters and Depths
3.1.2. Roots with Different Stretching Angles
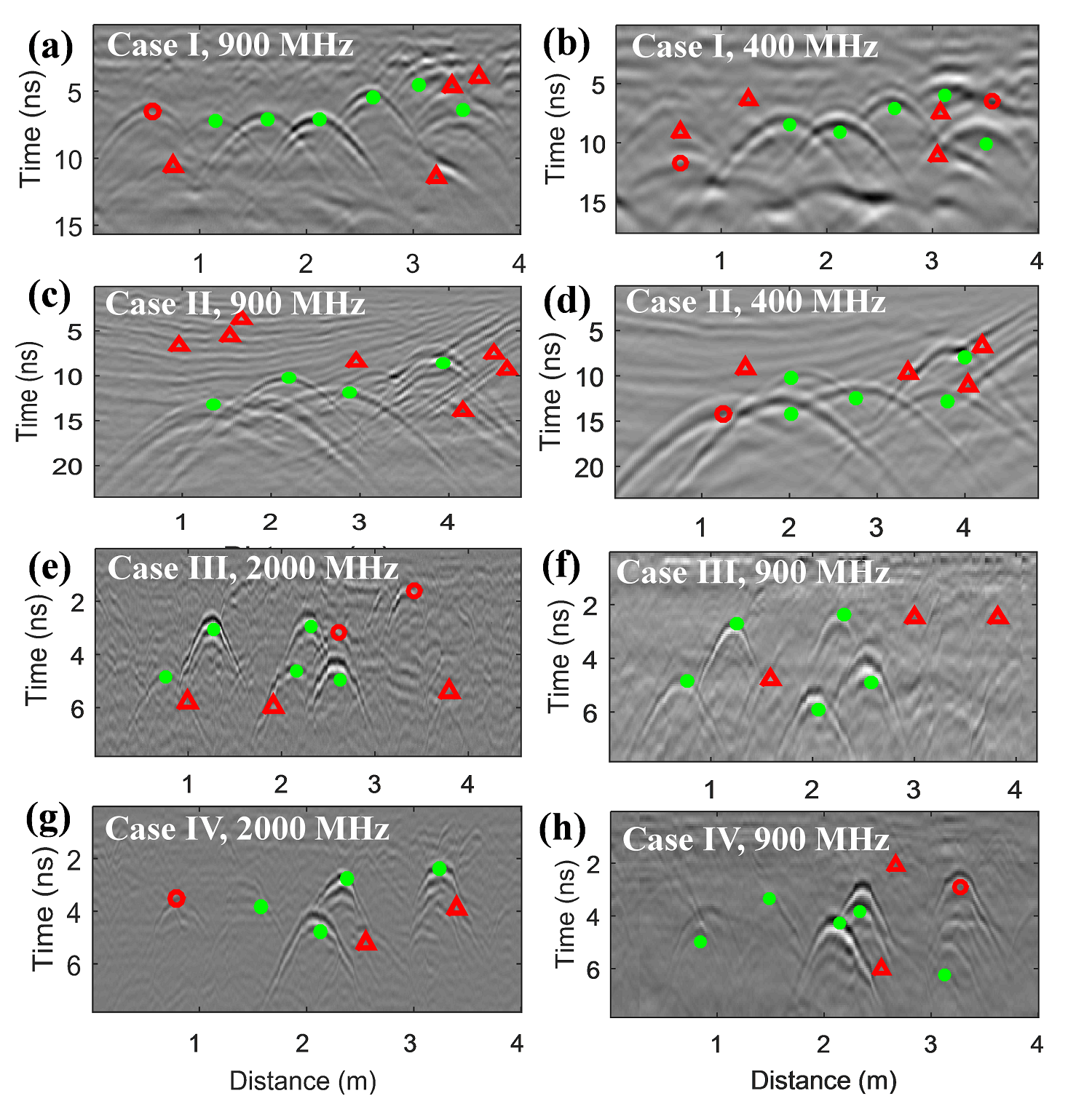
3.2. In Situ Experiment Results
4. Discussion
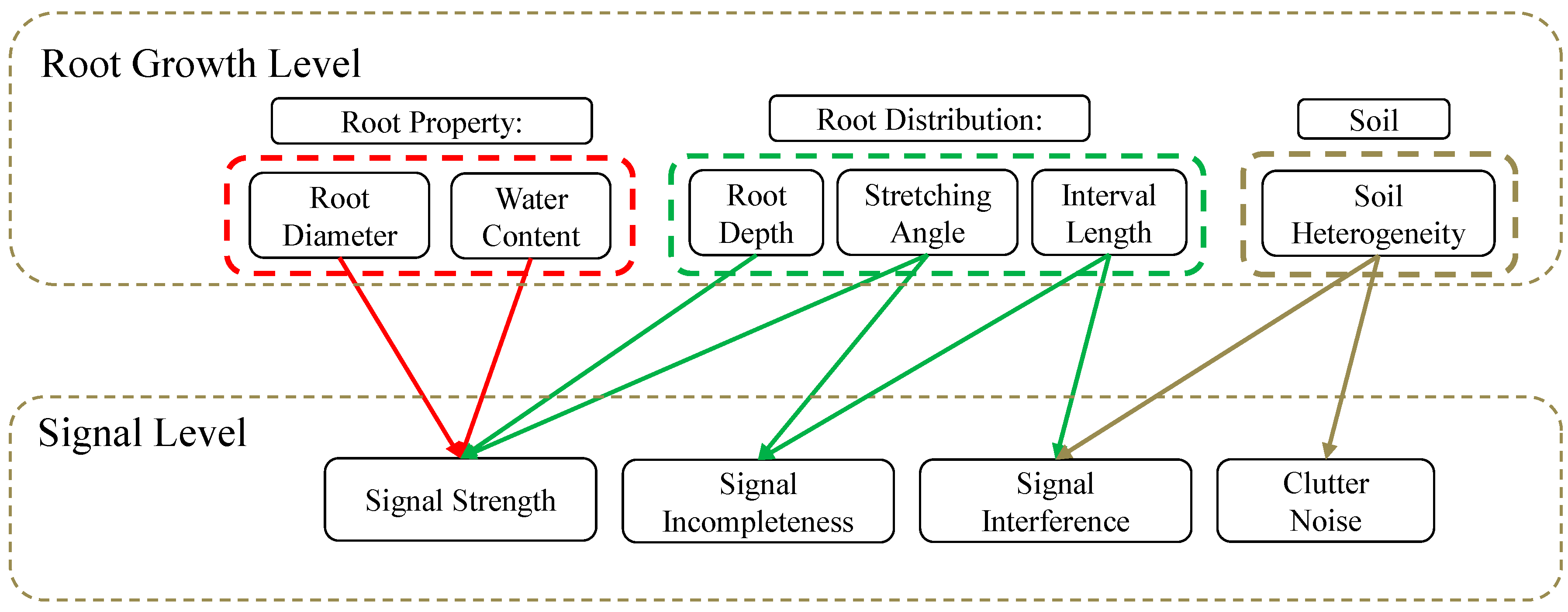
4.1. Factors Influencing Root Recognition Using RHT Algorithm in GPR Images
4.1.1. Root Property Factors
4.1.2. Root Distribution Factors
4.1.3. Soil Background Factors
4.2. Feasibility of Applying RHT for Root Recognition in GPR Profiles
4.3. Further Improvement of the Automatic Recognition Algorithm for Root Signal in GPR Profiles
4.3.1. Development of Noise Reduction Methods for Heterogeneous Soil Background
4.3.2. Combination of Several Advanced Algorithms to Deal With Complex Reflection of Roots
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Daniels, D.J. Surface-penetrating radar. Electron. Commun. Eng. J. 1996, 8, 165–182. [Google Scholar] [CrossRef]
- Jol, H.M. Ground Penetrating Radar: Theory and Application; Elsevier Science: Oxford, UK, 2009; pp. 4–5. [Google Scholar]
- Vore, S.L.D. Ground-penetrating radar: An introduction for archaeologists. Geoarchaeology 1997, 54, 527–528. [Google Scholar]
- Bassuk, N.; Grabosk, J.; Mucciardi, A.; Raffel, G. Ground penetrating radar accurately locates tree roots in two soil media under pavement. Arboric. Urban For. 2011, 37, 160–166. [Google Scholar]
- Čermák, J.; Ka, J.H.; Martinková, M.; Prax, A. Urban tree root systems and their survival near houses analyzed using ground penetrating radar and sap flow techniques. Plant Soil 2000, 219, 103–116. [Google Scholar] [CrossRef]
- Hruska, J.; Čermák, J.; Šustek, S. Mapping tree root systems with ground-penetrating radar. Tree Physiol. 1999, 19, 125–130. [Google Scholar] [CrossRef] [PubMed]
- Isaac, M.E.; Anglaaere, L.C.N. An in situ approach to detect tree root ecology: Linking ground-penetrating radar imaging to isotope-derived water acquisition zones. Ecol. Evol. 2013, 3, 1330–1339. [Google Scholar] [CrossRef] [PubMed]
- Stokes, A.; Fourcaud, T.; Hruska, J.; Cermak, J.; Nadyezdhina, N.; Nadyezhdin, V.; Praus, L. An evaluation of different methods to investigate root system architecture of urban trees in situ. I. Ground-penetrating radar. J. Arboric. 2002, 28, 2–10. [Google Scholar]
- Wu, Y.; Guo, L.; Cui, X.; Chen, J.; Cao, X.; Lin, H. Ground-penetrating radar-based automatic reconstruction of three-dimensional coarse root system architecture. Plant Soil 2014, 383, 155–172. [Google Scholar] [CrossRef]
- Butnor, J.R.; Doolittle, J.A.; Kress, L.; Cohen, S.; Johnsen, K.H. Use of ground-penetrating radar to study tree roots in the southeastern United States. Tree Physiol. 2001, 21, 1269–1278. [Google Scholar] [CrossRef] [PubMed]
- Cui, X.; Guo, L.; Chen, J.; Chen, X.; Zhu, X. Estimating tree-root biomass in different depths using ground-penetrating radar: Evidence from a controlled experiment. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3410–3423. [Google Scholar] [CrossRef]
- Cui, X.H.; Chen, J.; Shen, J.S.; Cao, X. Modeling tree root diameter and biomass by ground-penetrating radar. Sci. China Earth Sci. 2011, 5, 711–719. [Google Scholar] [CrossRef]
- Guo, L.; Lin, H.; Fan, B.; Cui, X.; Chen, J. Impact of root water content on root biomass estimation using ground penetrating radar: Evidence from forward simulations and field controlled experiments. Plant Soil 2013, 371, 503–520. [Google Scholar] [CrossRef]
- Hirano, Y.; Dannoura, M.; Aono, K.; Igarashi, T.; Ishii, M.; Yamase, K.; Makita, N.; Kanazawa, Y. Limiting factors in the detection of tree roots using ground-penetrating radar. Plant Soil 2009, 319, 15–24. [Google Scholar] [CrossRef]
- Stover, D.B.; Day, L.F.P.; Butnor, J.R.; Ke, B.G. Effect of elevated CO2 on coarse-root biomass in Florida scrub detected by ground-penetrating radar. Ecology 2007, 88, 1328–1334. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.; Cohn, A. Probabilistic robust hyperbola mixture model for interpreting ground penetrating radar data. In Proceedings of the International Joint Conference on Neural Networks (IJCNN), Shanghai, China, 6–9 June 2010; pp. 1–8.
- Pasolli, E.; Melgani, F.; Donelli, M. Automatic Analysis of GPR Images: A Pattern-Recognition Approach. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2206–2217. [Google Scholar] [CrossRef]
- Maas, C.; Schmalzl, J. Using pattern recognition to automatically localize reflection hyperbolas in data from ground penetrating radar. Comput. Geosci. 2013, 58, 116–125. [Google Scholar] [CrossRef]
- Birkenfeld, S. Automatic detection of reflexion hyperbolas in GPR data with neural networks. In Proceedings of the 2010 World Automation Congress, Kobe, Japan, 19–23 September 2010; pp. 1189–1194.
- Janning, R.; Busche, A.; Horváth, T.; Schmidt-Thieme, L. Buried pipe localization using an iterative geometric clustering on GPR data. Artif. Intell. Rev. 2014, 42, 403–425. [Google Scholar] [CrossRef]
- Janning, R.; Horváth, T.; Busche, A.; Schmidt-Thieme, L. GamRec: A Clustering Method Using Geometrical Background Knowledge for GPR Data Preprocessing. In Proceedings of the Artificial Intelligence Applications and Innovations, Halkidiki, Greece, 27–30 September 2012; pp. 347–356.
- Duda, R.O.; Hart, P.E. Use of the Hough transformation to detect lines and curves in pictures. Commun. ACM 1972, 15, 11–15. [Google Scholar] [CrossRef]
- Paul, C.H. Method and Means for Recognizing Complex Patterns. U.S. Patent 3,069,654, 18 December 1962. [Google Scholar]
- Xu, L.; Oja, E.; Kultanen, P. A new curve detection method Randomized Hough transform (RHT). Pattern Recognit. Lett. 1990, 11, 331–338. [Google Scholar] [CrossRef]
- Xu, L. A5 problem solving paradigm: A unified perspective and new results on RHT computing, mixture based learning, and evidence combination. In Proceedings of the 2005 IEEE International Conference on Granular Computing, Beijing, China, 25–27 July 2005; pp. 70–77.
- Xu, L.; Oja, E. Randomized Hough transform (RHT): Basic mechanisms, algorithms, and complexities. CVGIP Image Underst. 1993, 57, 131–154. [Google Scholar] [CrossRef]
- Simi, A.; Bracciali, S.; Manacorda, G. Hough transform based automatic pipe detection for array GPR: Algorithm development and on-site tests. In Proceedings of the Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1–6.
- Borgioli, G.; Capineri, L.; Falorni, P.L.; Matucci, S.; Windsor, C.G. The Detection of Buried Pipes From Time-of-Flight Radar Data. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2254–2266. [Google Scholar] [CrossRef]
- Windsor, C.; Capineri, L.; Falorni, P.; Matucci, S.; Borgioli, G. The estimation of buried pipe diameters using ground penetrating radar. Insight-Non-Destr. Test. Cond. Monit. 2005, 47, 394–399. [Google Scholar] [CrossRef]
- Falorni, P.; Capineri, L.; Masotti, L.; Pinelli, G. 3-D radar imaging of buried utilities by features estimation of hyperbolic diffraction patterns in radar scans. In Proceedings of the Tenth International Conference on Ground Penetrating Radar, Delft, The Netherlands, 21–24 June 2004; pp. 403–406.
- Song, W.L.; Yang, X.; Ke-Xin, L.I.; Jia, H.M. Tree root GPR target detection based on the gradient magnitude and modified Hough transform. J. For. Univ. 2013, 35, 108–112. [Google Scholar]
- Guo, L.; Wu, Y.; Chen, J.; Hirano, Y.; Tanikawa, T.; Li, W.; Cui, X. Calibrating the impact of root orientation on root quantification using ground-penetrating radar. Plant Soil 2015, 395, 289–305. [Google Scholar] [CrossRef]
- Tzanis, A. matGPR Release 2: A freeware MATLAB® package for the analysis & interpretation of common and single offset GPR data. FastTimes 2010, 15, 17–43. [Google Scholar]
- Capineri, L.; Grande, P.; Temple, J. Advanced image-processing technique for real-time interpretation of ground-penetrating radar images. Int. J. Imaging Syst. Technol. 1998, 9, 51–59. [Google Scholar] [CrossRef]
- Carlotto, M.J. Detecting buried mines in ground-penetrating radar using a Hough transform approach. In Proceedings of the Battlespace Digitization and Network-Centric Warfare, Orlando, FL, USA, 3–5 April 2002; pp. 251–261.
- Gamba, P.; Lossani, S. Neural detection of pipe signatures in ground penetrating radar images. IEEE Trans. Geosci. Remote Sens. 2000, 38, 790–797. [Google Scholar] [CrossRef]
- Guo, L.; Chen, J.; Cui, X.; Fan, B.; Lin, H. Application of ground penetrating radar for coarse root detection and quantification: A review. Plant Soil 2012, 362, 1–23. [Google Scholar] [CrossRef]
- Radzevicius, S.; Daniels, J. Ground penetrating radar polarization and scattering from cylinders. J. Appl. Geophys. 2000, 45, 111–125. [Google Scholar] [CrossRef]
- Der Kruk, J.; Streich, R. Towards true-amplitude imaging of GPR data using exact radiation patterns. In Proceedings of the 2010 8th European Conference on Synthetic Aperture Radar (EUSAR), Aachen, Germany, 7–10 June 2010; pp. 1–3.
- Tanikawa, T.; Hirano, Y.; Dannoura, M.; Yamase, K.; Aono, K.; Ishii, M.; Igarashi, T.; Ikeno, H.; Kanazawa, Y. Root orientation can affect detection accuracy of ground-penetrating radar. Plant Soil 2013, 373, 317–327. [Google Scholar] [CrossRef]
- Guo, L.; Lin, H.; Fan, B.; Cui, X.; Chen, J. Forward simulation of root’s ground penetrating radar signal: Simulator development and validation. Plant Soil 2013, 372, 487–505. [Google Scholar] [CrossRef]
- Mertens, L.; Persico, R.; Matera, L.; Lambot, S. Automated detection of reflection hyperbolas in complex GPR images with no a priori knowledge on the medium. IEEE Trans. Geosci. Remote Sens. 2015, 54, 580–596. [Google Scholar] [CrossRef]
- Delbo, S.; Gamba, P.; Roccato, D. A fuzzy shell clustering approach to recognize hyperbolic signatures in subsurface radar images. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1447–1451. [Google Scholar] [CrossRef]
- Van Kempen, L.; Sahli, H.; Brooks, J.; Cornelis, J. New results on clutter reduction and parameter estimation for land mine detection using GPR. In Proceedings of the Eighth International Conference on Ground Penetrating Radar, Gold Coast, Australia, 23–26 May 2000; pp. 872–879.
- Gurbuz, A. Determination of Background Distribution for Ground-Penetrating Radar Data. IEEE Geosci. Remote Sens. Lett. 2012, 9, 544–548. [Google Scholar] [CrossRef]
- Safont, G.; Salazar, A.; Rodriguez, A.; Vergara, L. On Recovering Missing Ground Penetrating Radar Traces by Statistical Interpolation Methods. Remote Sens. 2014, 6, 7546–7565. [Google Scholar] [CrossRef]
- Yao, J.; Kharma, N.; Grogono, P. A multi-population genetic algorithm for robust and fast ellipse detection. Form. Pattern Anal. Appl. 2005, 8, 149–162. [Google Scholar] [CrossRef]
- Lu, W.; Tan, J. Detection of incomplete ellipses in images with strong noise by iterative randomized Hough Transform (IRHT). Pattern Recognit. 2008, 41, 1268–1279. [Google Scholar] [CrossRef]
- Windsor, C.G.; Capineri, L.; Falorni, P. A Data Pair-Labeled Generalized Hough Transform for Radar Location of Buried Objects. IEEE Geosci. Remote Sens. Lett. 2014, 11, 124–127. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Location | Plant Species | Detected Root Depth (m) | Soil Water Content (%) | Center Frequency (MHz) | Survey Line Layout |
|---|---|---|---|---|---|---|
| I | Xilingol | C. microphylla | 0.2~1.0 | 4.94 | 400/900 | Circular |
| II | Jingbian | Populus simonii | 0.5~1.0 | 1.51 | 400/900 | Circular |
| III | Wushen Banner | C. korshinskii Kom. | 0.1~0.5 | 6.41 | 900/2000 | Grid |
| IV | Otog Front Banner | C. korshinskii Kom. | 0.1~0.5 | 2.86 | 900/2000 | Grid |
| Case I | Case II | Case III | Case IV | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Center frequency | 900 MHz | 400 MHz | 900 MHz | 400 MHz | 2000 MHz | 900 MHz | 2000 MHz | 900 MHz | |
| Overall hyperbolas | 141 | 117 | 40 | 38 | 106 | 110 | 130 | 157 | |
| RHT | RR | 0.8 | 0.803 | 0.697 | 0.722 | 0.802 | 0.809 | 0.915 | 0.898 |
| FAR | 1.5 | 1.394 | 2.142 | 2.04 | 1.41 | 1.483 | 1.511 | 1.397 | |
| Threshold | 10 | 10 | 15 | 10 | 15 | 20 | 15 | 15 | |
| ANN | RR | 0.71 | 0.74 | 0.605 | 0.611 | 0.711 | 0.727 | 0.646 | 0.694 |
| FAR | 1.932 | 1.416 | 3.749 | 3.749 | 2.479 | 2.156 | 1.86 | 2.428 | |
| Threshold | 0.7 | 0.65 | 0.7 | 0.7 | 0.7 | 0.5 | 0.65 | 0.5 | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Cui, X.; Guo, L.; Chen, J.; Chen, X.; Cao, X. Tree Root Automatic Recognition in Ground Penetrating Radar Profiles Based on Randomized Hough Transform. Remote Sens. 2016, 8, 430. https://doi.org/10.3390/rs8050430
Li W, Cui X, Guo L, Chen J, Chen X, Cao X. Tree Root Automatic Recognition in Ground Penetrating Radar Profiles Based on Randomized Hough Transform. Remote Sensing. 2016; 8(5):430. https://doi.org/10.3390/rs8050430
Chicago/Turabian StyleLi, Wentao, Xihong Cui, Li Guo, Jin Chen, Xuehong Chen, and Xin Cao. 2016. "Tree Root Automatic Recognition in Ground Penetrating Radar Profiles Based on Randomized Hough Transform" Remote Sensing 8, no. 5: 430. https://doi.org/10.3390/rs8050430
APA StyleLi, W., Cui, X., Guo, L., Chen, J., Chen, X., & Cao, X. (2016). Tree Root Automatic Recognition in Ground Penetrating Radar Profiles Based on Randomized Hough Transform. Remote Sensing, 8(5), 430. https://doi.org/10.3390/rs8050430