
Evaluation of the Chinese Fine Spatial Resolution Hyperspectral Satellite TianGong-1 in Urban Land-Cover Classification





Abstract
:
1. Introduction
2. Study Site and Datasets
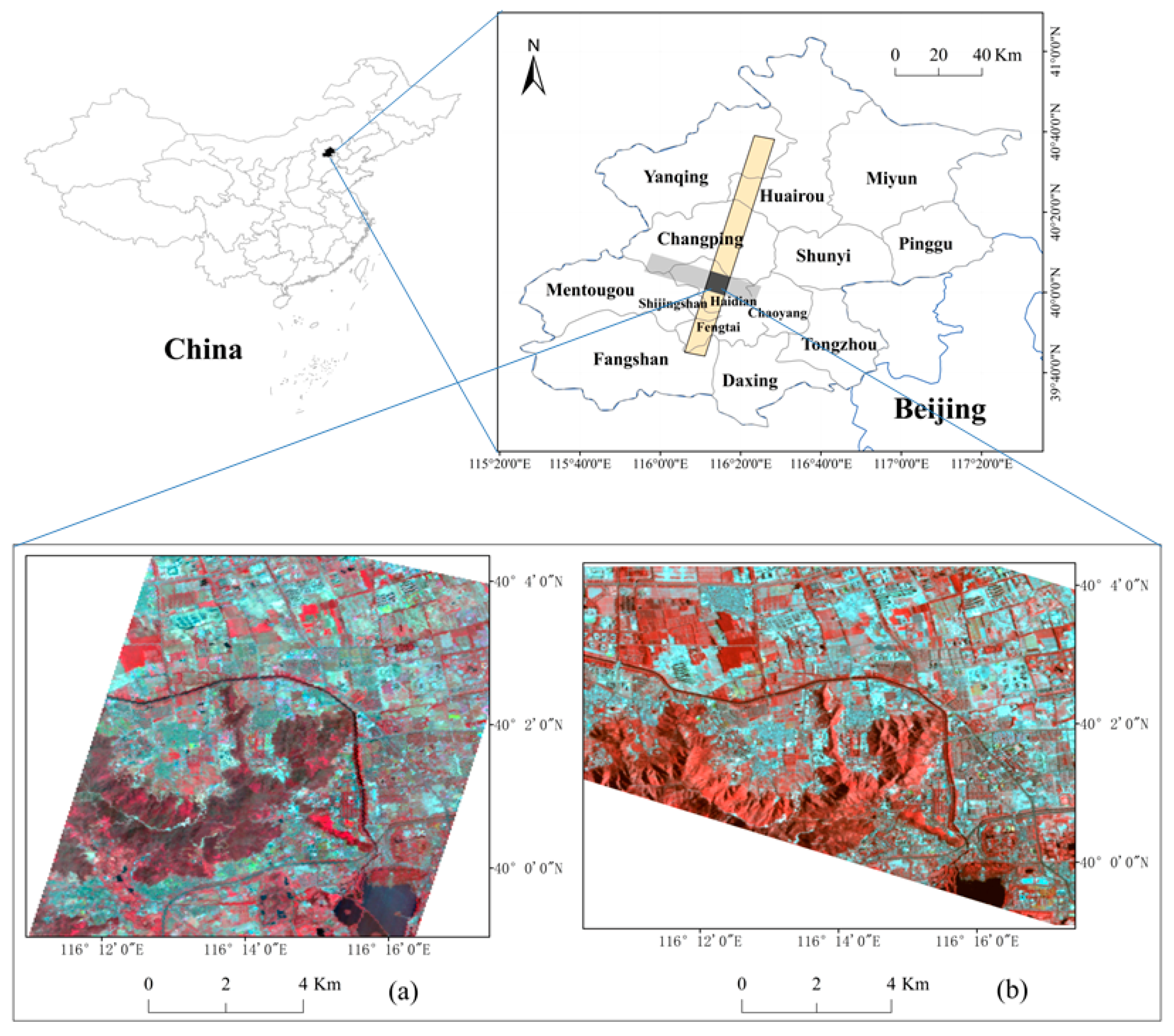
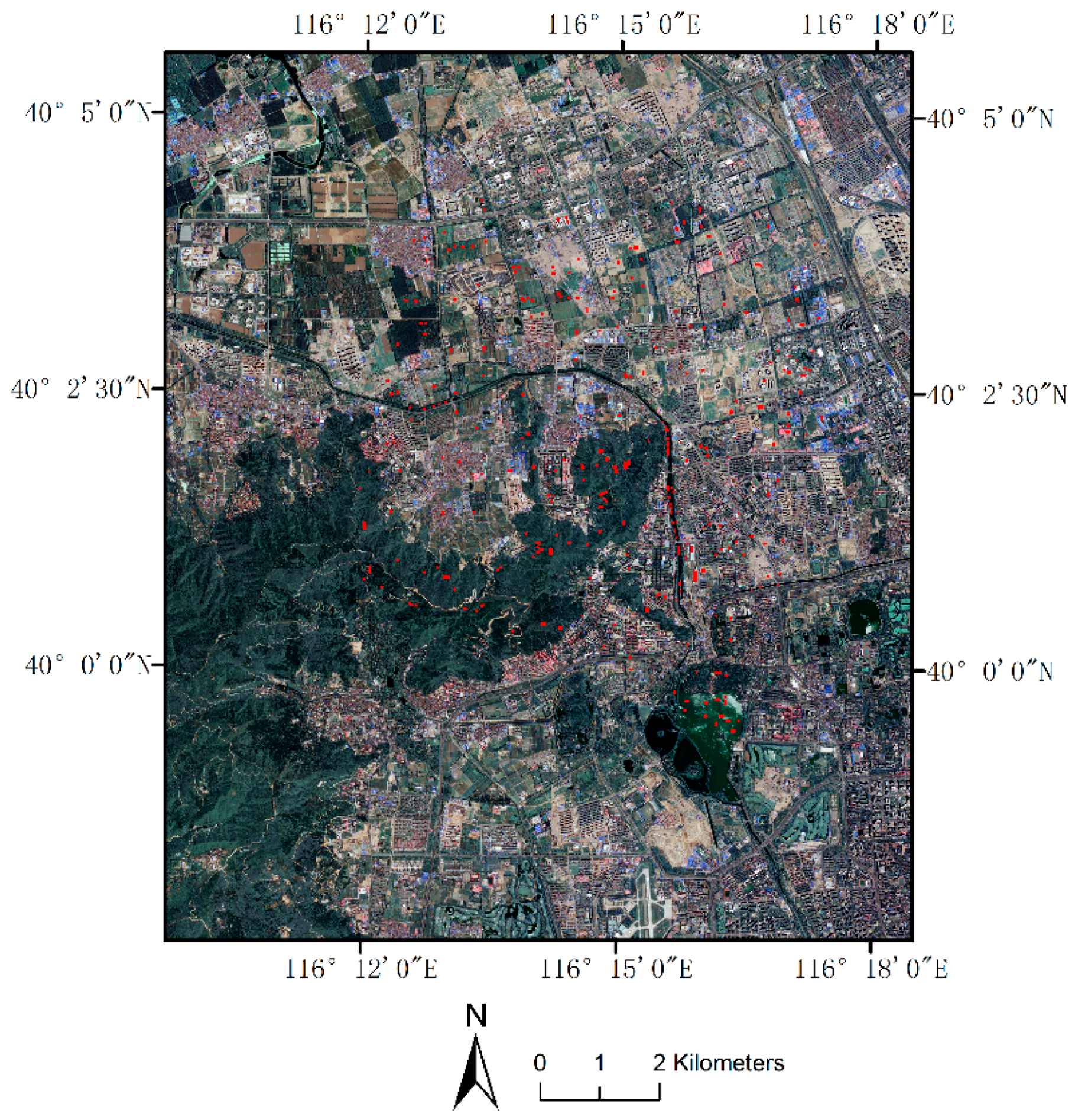
2.1. Study Area
2.2. Remote Sensing Data
2.3. Urban Land-Cover Classes and Reference Data
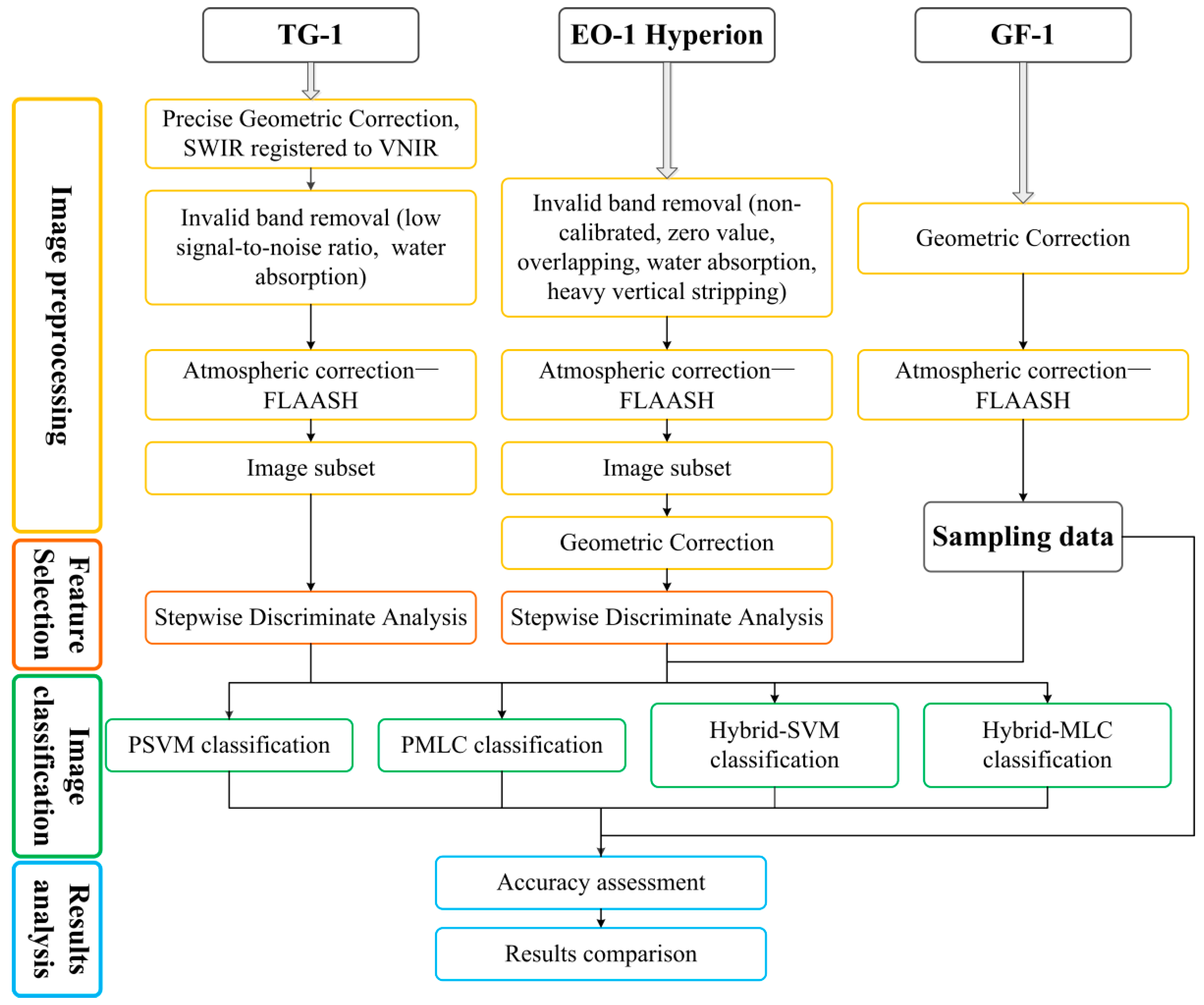
3. Methodology
3.1. Image Pre-Processing
3.1.1. TG-1
3.1.2. EO-1 Hyperion
3.1.3. Dimensionality Reduction
3.2. Pixel-Based Classification
3.3. Hybrid-Based Classification
3.4. Accuracy Assessment
4. Results and Analysis
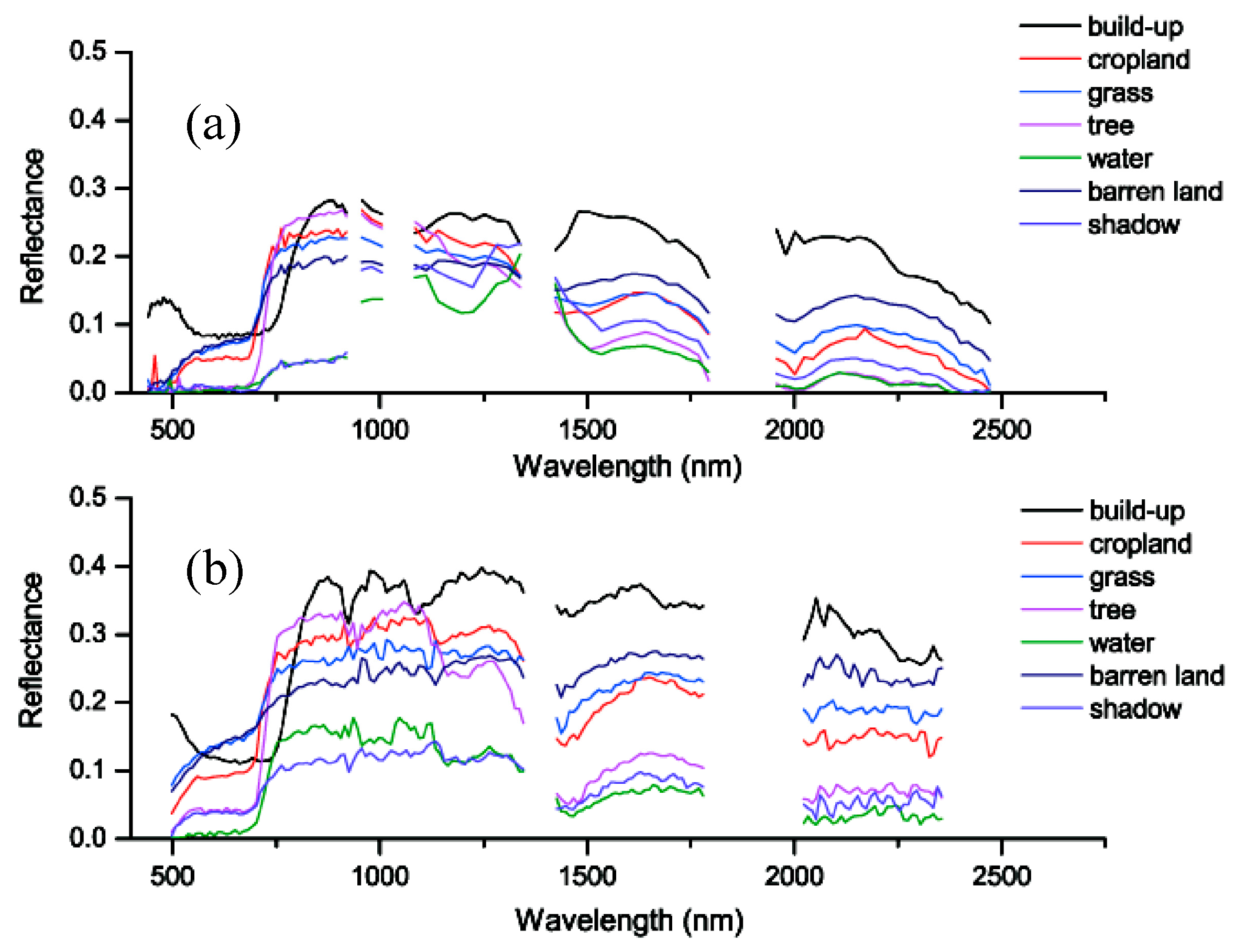
4.1. Spectral Analysis
4.2. Dimensionality Reduction Analysis
4.3. Classification Analysis
4.3.1. Tuning of Algorithm Parameters
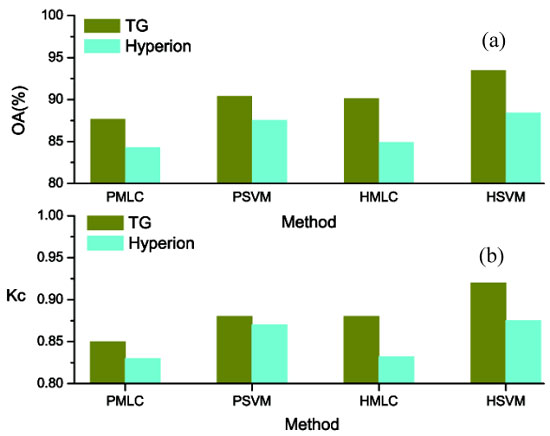
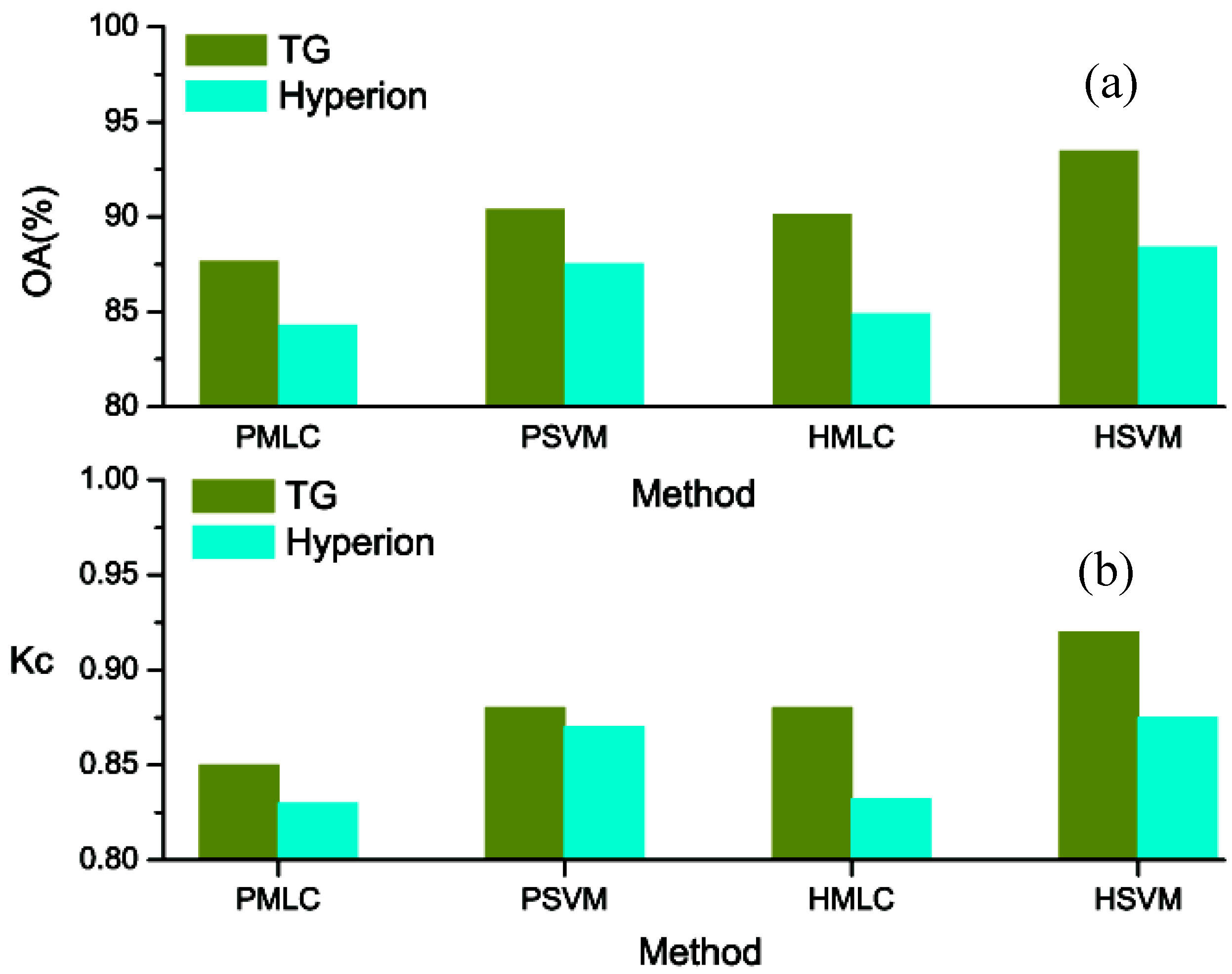
4.3.2. Comparison of the Two Hyperspectral Sensors’ Classifications
4.3.3. Comparison of the Pixel-Based and Hybrid Approaches
5. Discussion
5.1. Potential Contribution of TG-1 in Urban Classification
5.2. Classification Techniques Analysis
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Tong, Q.; Xue, Y.; Zhang, L. Progress in hyperspectral remote sensing science and technology in China over the past three decades. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 70–91. [Google Scholar] [CrossRef]
- Goetz, A.F.H. Three decades of hyperspectral remote sensing of the earth: A personal view. Remote Sens. Environ. 2009, 113, S5–S16. [Google Scholar] [CrossRef]
- Fan, F.; Deng, Y. Enhancing endmember selection in multiple endmember spectral mixture analysis (MESMA) for urban impervious surface area mapping using spectral angle and spectral distance parameters. Int. J. Appl. Earth Obs. Geoinf. 2014, 33, 290–301. [Google Scholar] [CrossRef]
- Falcone, J.A.; Gomez, R. Mapping impervious surface type and sub-pixel abundance using hyperion hyperspectral imagery. Geocarto Int. 2005, 20, 3–10. [Google Scholar] [CrossRef]
- Cavalli, R.M.; Fusilli, L.; Pascucci, S.; Pignatti, S.; Santini, F. Hyperspectral sensor data capability for retrieving complex urban land cover in comparison with multispectral data: Venice city case study (Italy). Sensors 2008, 8, 3299–3320. [Google Scholar] [CrossRef]
- Jia, M.; Zhang, Y.; Wang, Z.; Song, K.; Ren, C. Mapping the distribution of mangrove species in the core zone of mai po marshes nature reserve, Hong Kong, using hyperspectral data and high-resolution data. Int. J. Appl. Earth Obs. Geoinf. 2014, 33, 226–231. [Google Scholar] [CrossRef]
- Tang, J.; Liu, L.; Cheng, H.; Hu, S.; Duan, J. Long-term orbit prediction for TianGong-1 spacecraft using the mean atmosphere model. Adv. Space Res. 2015, 55, 1432–1444. [Google Scholar] [CrossRef]
- Landgrebe, D. Hyperspectral image data analysis. IEEE Signal Process. Mag. 2002, 19, 17–28. [Google Scholar] [CrossRef]
- Rocchini, D.; Balkenhol, N.; Carter, G.A.; Foody, G.M.; Gillespie, T.W.; He, K.S.; Kark, S.; Levin, N.; Lucas, K.; Luoto, M.; et al. Remotely sensed spectral heterogeneity as a proxy of species diversity: Recent advances and open challenges. Ecol. Inform. 2010, 5, 318–329. [Google Scholar] [CrossRef]
- Weng, Q. Remote sensing of impervious surfaces in the urban areas: Requirements, methods, and trends. Remote Sens. Environ. 2012, 117, 34–49. [Google Scholar] [CrossRef]
- Sun, X.; Zhang, L.; Yang, H.; Wu, T.; Cen, Y.; Guo, Y. Enhancement of spectral resolution for remotely sensed multispectral image. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 2198–2211. [Google Scholar] [CrossRef]
- Yokoya, N.; Yairi, T.; Iwasaki, A. Coupled nonnegative matrix factorization unmixing for hyperspectral and multispectral data fusion. IEEE Trans. Geosci. Remote Sens. 2012, 50, 528–537. [Google Scholar] [CrossRef]
- Segl, K.; Roessner, S.; Heiden, U.; Kaufmann, H. Fusion of spectral and shape features for identification of urban surface cover types using reflective and thermal hyperspectral data. ISPRS J. Photogramm. Remote Sens. 2003, 58, 99–112. [Google Scholar] [CrossRef]
- Liu, T.; Yang, X. Mapping vegetation in an urban area with stratified classification and multiple endmember spectral mixture analysis. Remote Sens. Environ. 2013, 133, 251–264. [Google Scholar] [CrossRef]
- Powell, R.L.; Roberts, D.A.; Dennison, P.E.; Hess, L.L. Sub-pixel mapping of urban land cover using multiple endmember spectral mixture analysis: Manaus, Brazil. Remote Sens. Environ. 2007, 106, 253–267. [Google Scholar] [CrossRef]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Myint, S.W.; Gober, P.; Brazel, A.; Grossman-Clarke, S.; Weng, Q. Per-pixel vs. Object-based classification of urban land cover extraction using high spatial resolution imagery. Remote Sens. Environ. 2011, 115, 1145–1161. [Google Scholar] [CrossRef]
- He, Y.; Franklin, S.E.; Guo, X.; Stenhouse, G.B. Object-oriented classification of multi-resolution images for the extraction of narrow linear forest disturbance. Remote Sens. Lett. 2011, 2, 147–155. [Google Scholar] [CrossRef]
- Walter, V. Object-based classification of remote sensing data for change detection. ISPRS J. Photogramm. Remote Sens. 2004, 58, 225–238. [Google Scholar] [CrossRef]
- Li, X.; Meng, Q.; Gu, X.; Jancso, T.; Yu, T.; Wang, K.; Mavromatis, S. A hybrid method combining pixel-based and object-oriented methods and its application in Hungary using Chinese HJ-1 satellite images. Int. J. Remote Sens. 2013, 34, 4655–4668. [Google Scholar] [CrossRef]
- Yang, J.; He, Y.; Weng, Q. An automated method to parameterize segmentation scale by enhancing intrasegment homogeneity and intersegment heterogeneity. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1282–1286. [Google Scholar] [CrossRef]
- Shackelford, A.K.; Davis, C.H. A combined fuzzy pixel-based and object-based approach for classification of high-resolution multispectral data over urban areas. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2354–2363. [Google Scholar] [CrossRef]
- Malinverni, E.S.; Tassetti, A.N.; Mancini, A.; Zingaretti, P.; Frontoni, E.; Bernardini, A. Hybrid object-based approach for land use/land cover mapping using high spatial resolution imagery. Int. J. Geogr. Inf. Sci. 2011, 25, 1025–1043. [Google Scholar] [CrossRef]
- Jacquin, A.; Misakova, L.; Gay, M. A hybrid object-based classification approach for mapping urban sprawl in periurban environment. Landsc. Urban Plan. 2008, 84, 152–165. [Google Scholar] [CrossRef]
- Duro, D.C.; Franklin, S.E.; Dubé, M.G. A comparison of pixel-based and object-based image analysis with selected machine learning algorithms for the classification of agricultural landscapes using spot-5 HRG imagery. Remote Sens. Environ. 2012, 118, 259–272. [Google Scholar] [CrossRef]
- Tiangong-1 Service Platform for Promoting Space Utilization. Available online: http://www.msadc.cn/ (accessed on 10 October 2013).
- Petropoulos, G.P.; Kalaitzidis, C.; Vadrevu, K.P. Support vector machines and object-based classification for obtaining land-use/cover cartography from hyperion hyperspectral imagery. Comput. Geosci. 2012, 41, 99–107. [Google Scholar] [CrossRef]
- Li, X.; Wang, J.; Zhang, L.; Wu, T.; Yang, H.; Liu, K.; Jiang, H. A combined object-based segmentation and support vector machines approach for classification of TianGong-01 hyperspectral urban data. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 1777–1780.
- Adler-Golden, S.M.; Matthew, M.W.; Bernstein, L.S.; Levine, R.Y.; Berk, A.; Richtsmeier, S.C.; Acharya, P.K.; Anderson, G.P.; Felde, J.W.; Gardner, J. Atmospheric correction for shortwave spectral imagery based on MODTRAN4. In Proceedings of the SPIE’s International Symposium on Optical Science, Engineering, and Instrumentation, San-Diego, CA, USA, 9–14 July 1999.
- Thenkabail, P.S. Optimal hyperspectral narrowbands for discriminating agricultural crops. Remote Sens. Rev. 2001, 20, 257–291. [Google Scholar] [CrossRef]
- Foody, G.M.; Mathur, A. A relative evaluation of multiclass image classification by support vector machines. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1335–1343. [Google Scholar] [CrossRef]
- Dean, A.; Smith, G. An evaluation of per-parcel land cover mapping using maximum likelihood class probabilities. Int. J. Remote Sens. 2003, 24, 2905–2920. [Google Scholar] [CrossRef]
- Huang, C.; Song, K.; Kim, S.; Townshend, J.R.G.; Davis, P.; Masek, J.G.; Goward, S.N. Use of a dark object concept and support vector machines to automate forest cover change analysis. Remote Sens. Environ. 2008, 112, 970–985. [Google Scholar] [CrossRef]
- Melgani, F.; Bruzzone, L. Classification of hyperspectral remote sensing images with support vector machines. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1778–1790. [Google Scholar] [CrossRef]
- Liu, K.; Su, H.; Zhang, L.; Yang, H.; Zhang, R.; Li, X. Analysis of the urban heat island effect in Shijiazhuang, china using satellite and airborne data. Remote Sens. 2015, 7, 4804–4833. [Google Scholar] [CrossRef]
- Liu, K.; Su, H.; Li, X.; Wang, W.; Yang, L.; Liang, H. Quantifying spatial-temporal pattern of urban heat island in beijing: An improved assessment using land surface temperature (LST) time series observations from LANDSAT, MODIS, and Chinese new satellite GaoFen-1. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 2028–2042. [Google Scholar] [CrossRef]
- Baatz, M.; Schäpe, A. Multiresolution segmentation: An optimization approach for high quality multi-scale image segmentation. In Angewandte Geographische Informations-Verarbeitung XII; Herbert Wichmann Verlag: Heidelberg, Germany, 2000; pp. 12–23. [Google Scholar]
- Huang, C.; Davis, L.; Townshend, J. An assessment of support vector machines for land cover classification. Int. J. Remote Sens. 2002, 23, 725–749. [Google Scholar] [CrossRef]
- Lawrence, R.; Bunn, A.; Powell, S.; Zambon, M. Classification of remotely sensed imagery using stochastic gradient boosting as a refinement of classification tree analysis. Remote Sens. Environ. 2004, 90, 331–336. [Google Scholar] [CrossRef]
- Song, C.; Woodcock, C.E.; Seto, K.C.; Lenney, M.P.; Macomber, S.A. Classification and change detection using landsat tm data: When and how to correct atmospheric effects? Remote Sens. Environ. 2001, 75, 230–244. [Google Scholar] [CrossRef]
- Schmidt, K.; Skidmore, A. Spectral discrimination of vegetation types in a coastal wetland. Remote Sens. Environ. 2003, 85, 92–108. [Google Scholar] [CrossRef]
- George, R.; Padalia, H.; Kushwaha, S. Forest tree species discrimination in western Himalaya using EO-1 Hyperion. Int. J. Appl. Earth Obs. Geoinf. 2014, 28, 140–149. [Google Scholar] [CrossRef]
- Chang, C.-C.; Lin, C.-J. Training v-support vector regression: Theory and algorithms. Neural Comput. 2002, 14, 1959–1977. [Google Scholar] [CrossRef] [PubMed]
- Chang, M.-W.; Lin, C.-J. Leave-one-out bounds for support vector regression model selection. Neural Comput. 2005, 17, 1188–1222. [Google Scholar] [CrossRef]
- Zhang, C.; Xie, Z. Combining object-based texture measures with a neural network for vegetation mapping in the everglades from hyperspectral imagery. Remote Sens. Environ. 2012, 124, 310–320. [Google Scholar] [CrossRef]
- Belluco, E.; Camuffo, M.; Ferrari, S.; Modenese, L.; Silvestri, S.; Marani, A.; Marani, M. Mapping salt-marsh vegetation by multispectral and hyperspectral remote sensing. Remote Sens. Environ. 2006, 105, 54–67. [Google Scholar] [CrossRef]
- Pignatti, S.; Cavalli, R.M.; Cuomo, V.; Fusilli, L.; Pascucci, S.; Poscolieri, M.; Santini, F. Evaluating Hyperion capability for land cover mapping in a fragmented ecosystem: Pollino national park, Italy. Remote Sens. Environ. 2009, 113, 622–634. [Google Scholar] [CrossRef]
- Asner, G.P.; Heidebrecht, K.B. Imaging spectroscopy for desertification studies: Comparing AVIRIS and EO-1 Hyperion in Argentina DRYLANDS. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1283–1296. [Google Scholar] [CrossRef]
- Roberts, D.; Dennison, P.E.; Gardner, M.E.; Hetzel, Y.; Ustin, S.L.; Lee, C.T. Evaluation of the potential of Hyperion for fire danger assessment by comparison to the airborne visible/infrared imaging spectrometer. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1297–1310. [Google Scholar] [CrossRef]
- Blaschke, T.; Hay, G.J.; Kelly, M.; Lang, S.; Hofmann, P.; Addink, E.; Queiroz Feitosa, R.; van der Meer, F.; van der Werff, H.; van Coillie, F. Geographic object-based image analysis—towards a new paradigm. ISPRS J. Photogramm. Remote Sens. 2014, 87, 180–191. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Parameters | TG-1 | Hyperion | ||
|---|---|---|---|---|
| Band Type | VNIR | SWIR | VNIR | SWIR |
| Bands | 64 | 64 | 70 | 172 |
| Spatial Resolution (m) | 10 | 20 | 30 | 30 |
| Bandwidth (nm) | 10 | 23 | 10 | 10 |
| Spectral coverage (nm) | 400–1000 | 1000–2500 | 355–1058 | 852–2577 |
| IFOV (°) | 0.025 | 0.05 | 0.043 | |
| Swath width (km) | 10 | 7.5 | ||
| Altitude (km) | 340 | 705 | ||
| ID | Class | No. of Samples | |
|---|---|---|---|
| TG-1 Pixels | Hyperion Pixels | ||
| 1 | Built-up | 1148 | 391 |
| 2 | Cropland | 921 | 288 |
| 3 | Grass | 932 | 283 |
| 4 | Trees | 927 | 288 |
| 5 | Water | 906 | 307 |
| 6 | Barren land | 953 | 399 |
| 7 | Shadow | 904 | 276 |
| Image Segmentation Parameters | |||||
|---|---|---|---|---|---|
| Sensor Type | Algorithm | Scale | Color/Shape | Smoothness/Compactness | # of Objects |
| TG-1 | HMLC | 15 | 0.8/0.2 | 0.5/0.5 | 116,541 |
| HSVM | 12 | 185,548 | |||
| Hyperion | HMLC | 23 | 0.8/0.2 | 0.5/0.5 | 7669 |
| HSVM | 18 | 13,875 | |||
| TG-1: Pixel-based, MLC (OA = 88.43%, Kc = 0.86) | |||||||
| Built-up | Cropland | Grass | Trees | Water | Barren land | Shadow | |
| Pa | 91.3 | 87.03 | 77.96 | 95.16 | 93.41 | 87.37 | 86.19 |
| Ua | 90.13 | 84.74 | 85.8 | 87.19 | 94.97 | 91.21 | 84.78 |
| TG-1: Pixel-based, SVM (OA = 91.94%, Kc = 0.90) | |||||||
| Built-up | Cropland | Grass | Trees | Water | Barren land | Shadow | |
| Pa | 91.3 | 92.97 | 85.48 | 94.62 | 96.7 | 95.26 | 87.29 |
| Ua | 93.33 | 91.49 | 86.41 | 90.26 | 96.17 | 91.88 | 94.05 |
| Hyperion: Pixel-based, MLC (OA = 85.51%, Kc = 0.83) | |||||||
| Built-up | Cropland | Grass | Trees | Water | Barren land | Shadow | |
| Pa | 88.46 | 81.03 | 73.68 | 89.66 | 90.16 | 86.67 | 87.5 |
| Ua | 94.52 | 83.93 | 72.41 | 85.25 | 96.49 | 85.25 | 79.03 |
| Hyperion: Pixel-based, SVM (OA = 89.71%, Kc = 0.88) | |||||||
| Built-up | Cropland | Grass | Trees | Water | Barren land | Shadow | |
| Pa | 88.46 | 89.66 | 78.95 | 91.38 | 95.08 | 96.67 | 87.62 |
| Ua | 97.18 | 85.25 | 83.3 | 86.89 | 92.06 | 86.57 | 96.08 |
| TG: Hybrid MLC (OA = 91.86%, Kc = 0.90) | |||||||
| Built-up | Cropland | Grass | Trees | Water | Barren land | Shadow | |
| Pa | 95.65 | 90.27 | 83.87 | 94.62 | 97.8 | 91.05 | 88.95 |
| Ua | 91.29 | 86.08 | 93.98 | 85.85 | 95.7 | 96.11 | 95.83 |
| TG: Hybrid SVM (OA = 94.02%, Kc = 0.93) | |||||||
| Built-up | Cropland | Grass | Trees | Water | Barren land | Shadow | |
| Pa | 96.96 | 95.68 | 90.32 | 93.55 | 96.15 | 96.32 | 88.4 |
| Ua | 95.71 | 90.31 | 94.38 | 90.16 | 96.15 | 95.81 | 95.81 |
| Hyperion: Hybrid MLC (OA = 86.91%, Kc = 0.84) | |||||||
| Built-up | Cropland | Grass | Trees | Water | Barren land | Shadow | |
| Pa | 89.74 | 84.48 | 75.44 | 89.66 | 90.16 | 88.33 | 89.29 |
| Ua | 92.11 | 87.5 | 72.88 | 88.14 | 93.22 | 91.38 | 81.97 |
| Hyperion: Hybrid SVM (OA = 90.4%, Kc = 0.88) | |||||||
| Built-up | Cropland | Grass | Trees | Water | Barren land | Shadow | |
| Pa | 89.74 | 91.38 | 82.46 | 91.38 | 95.08 | 96.67 | 85.71 |
| Ua | 97.22 | 88.33 | 82.46 | 92.98 | 92.06 | 87.88 | 90.56 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Wu, T.; Liu, K.; Li, Y.; Zhang, L. Evaluation of the Chinese Fine Spatial Resolution Hyperspectral Satellite TianGong-1 in Urban Land-Cover Classification. Remote Sens. 2016, 8, 438. https://doi.org/10.3390/rs8050438
Li X, Wu T, Liu K, Li Y, Zhang L. Evaluation of the Chinese Fine Spatial Resolution Hyperspectral Satellite TianGong-1 in Urban Land-Cover Classification. Remote Sensing. 2016; 8(5):438. https://doi.org/10.3390/rs8050438
Chicago/Turabian StyleLi, Xueke, Taixia Wu, Kai Liu, Yao Li, and Lifu Zhang. 2016. "Evaluation of the Chinese Fine Spatial Resolution Hyperspectral Satellite TianGong-1 in Urban Land-Cover Classification" Remote Sensing 8, no. 5: 438. https://doi.org/10.3390/rs8050438
APA StyleLi, X., Wu, T., Liu, K., Li, Y., & Zhang, L. (2016). Evaluation of the Chinese Fine Spatial Resolution Hyperspectral Satellite TianGong-1 in Urban Land-Cover Classification. Remote Sensing, 8(5), 438. https://doi.org/10.3390/rs8050438