
An Integrated Approach for Monitoring Contemporary and Recruitable Large Woody Debris



Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
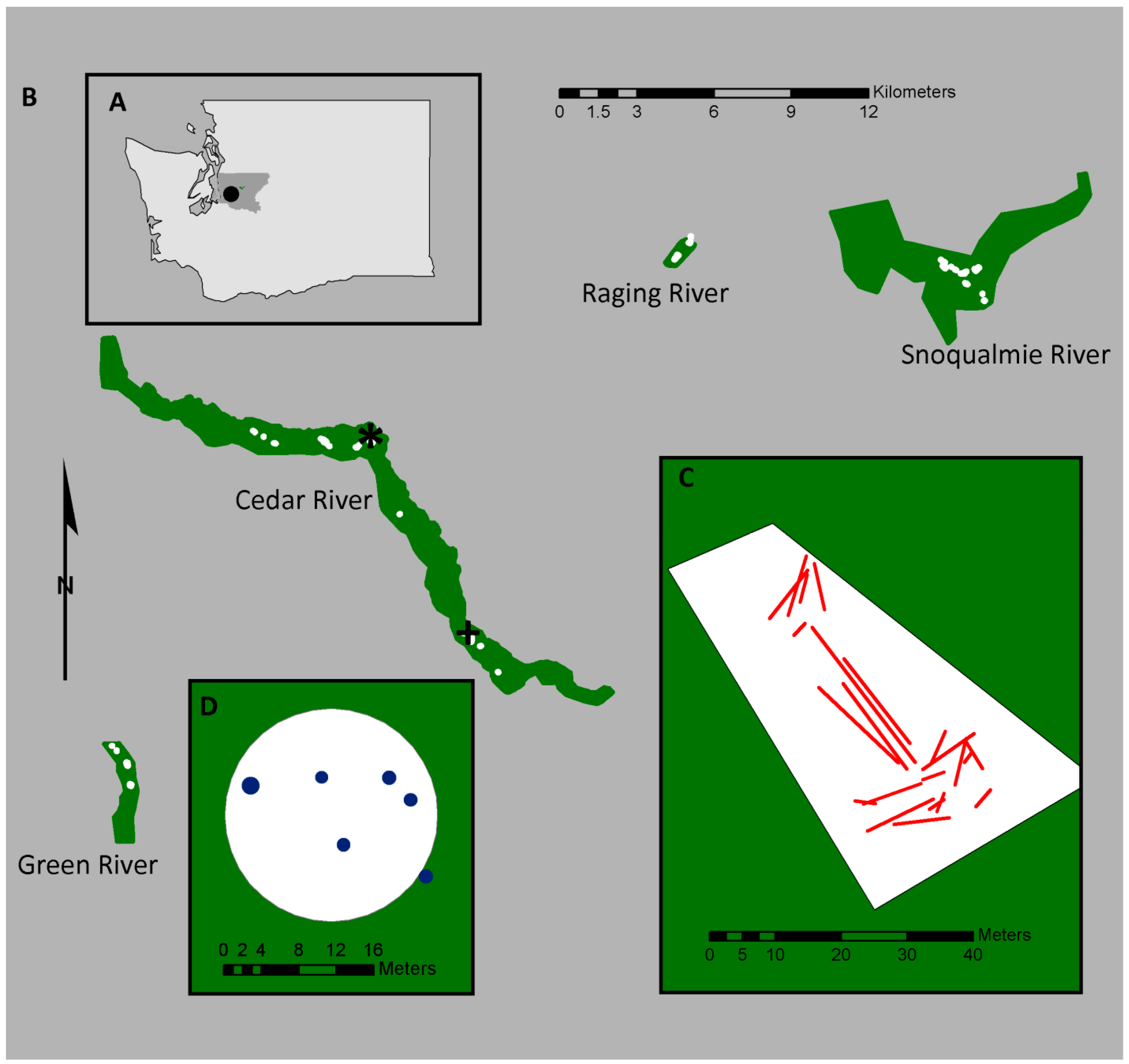
2.1. Study Area
2.2. Field Data Acquisition
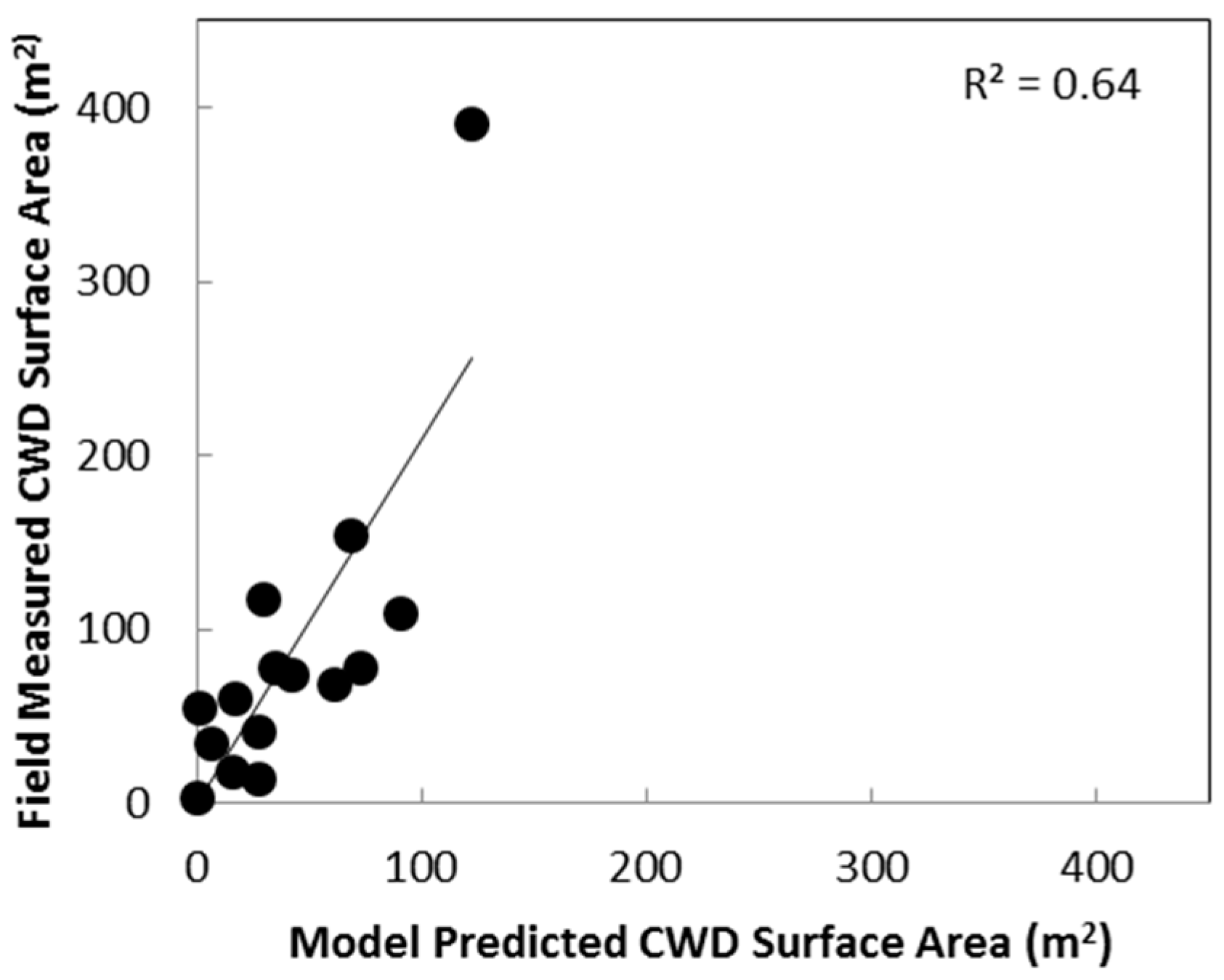
2.3. Remotely Sensed Data Acquisition, Processing, and Statistical Analysis
3. Results
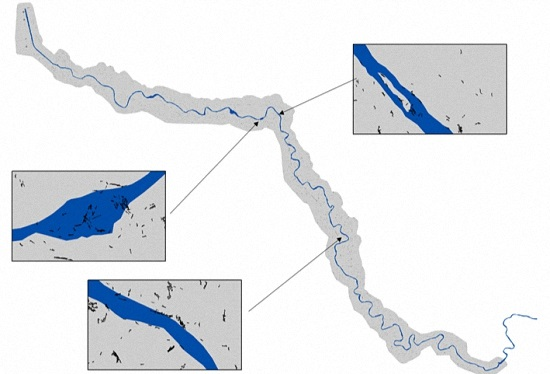
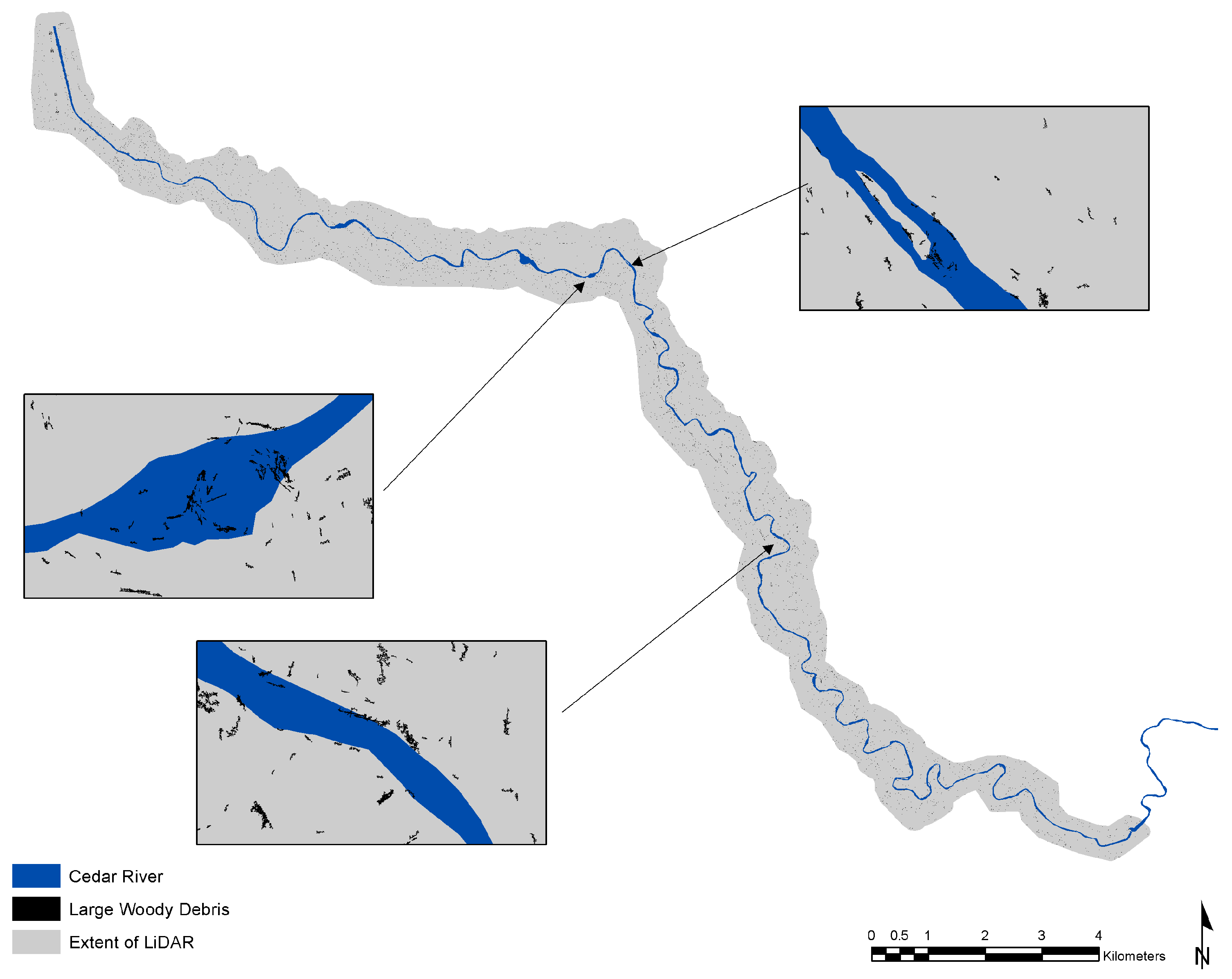
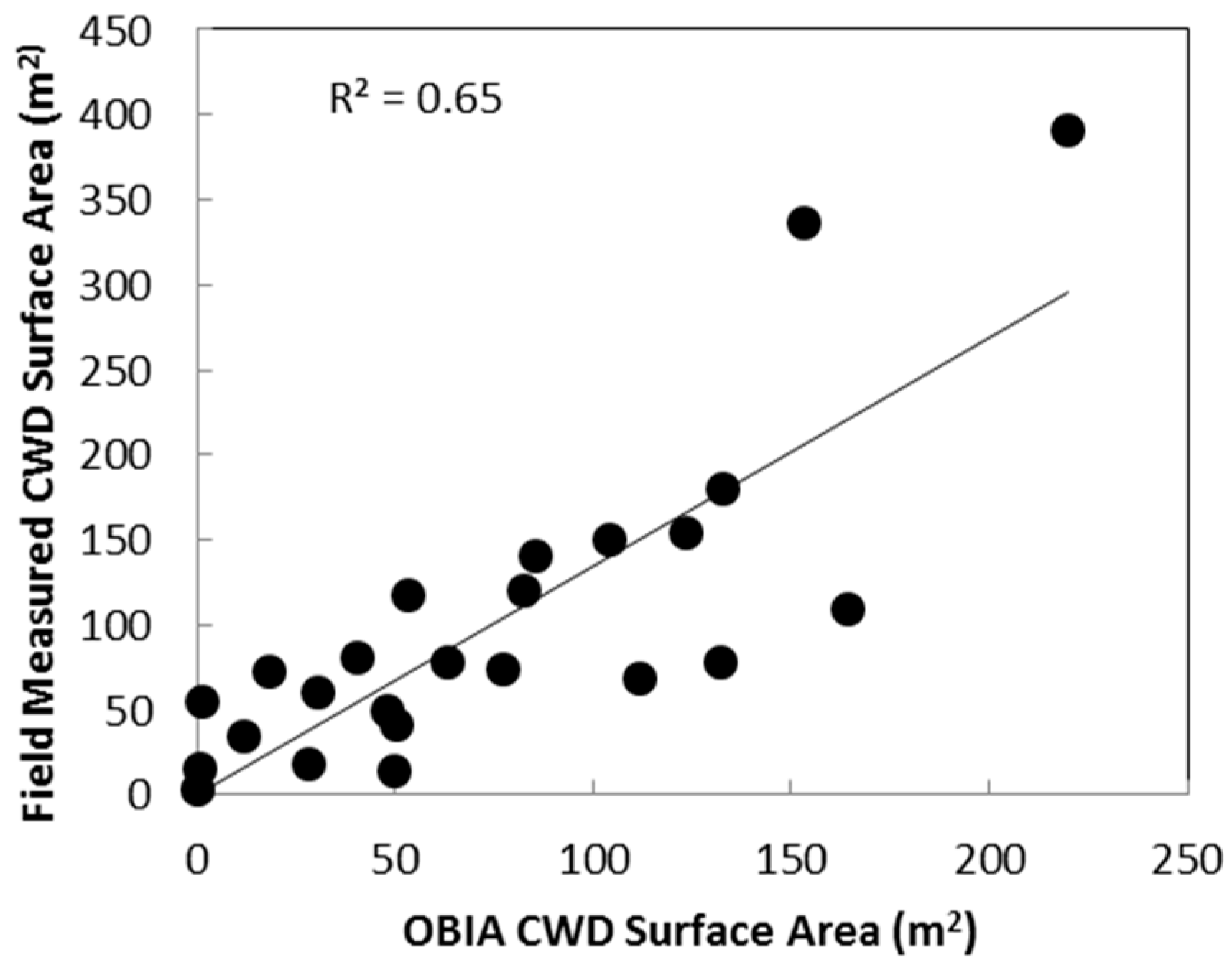
3.1. LWD Identification, Automated Method
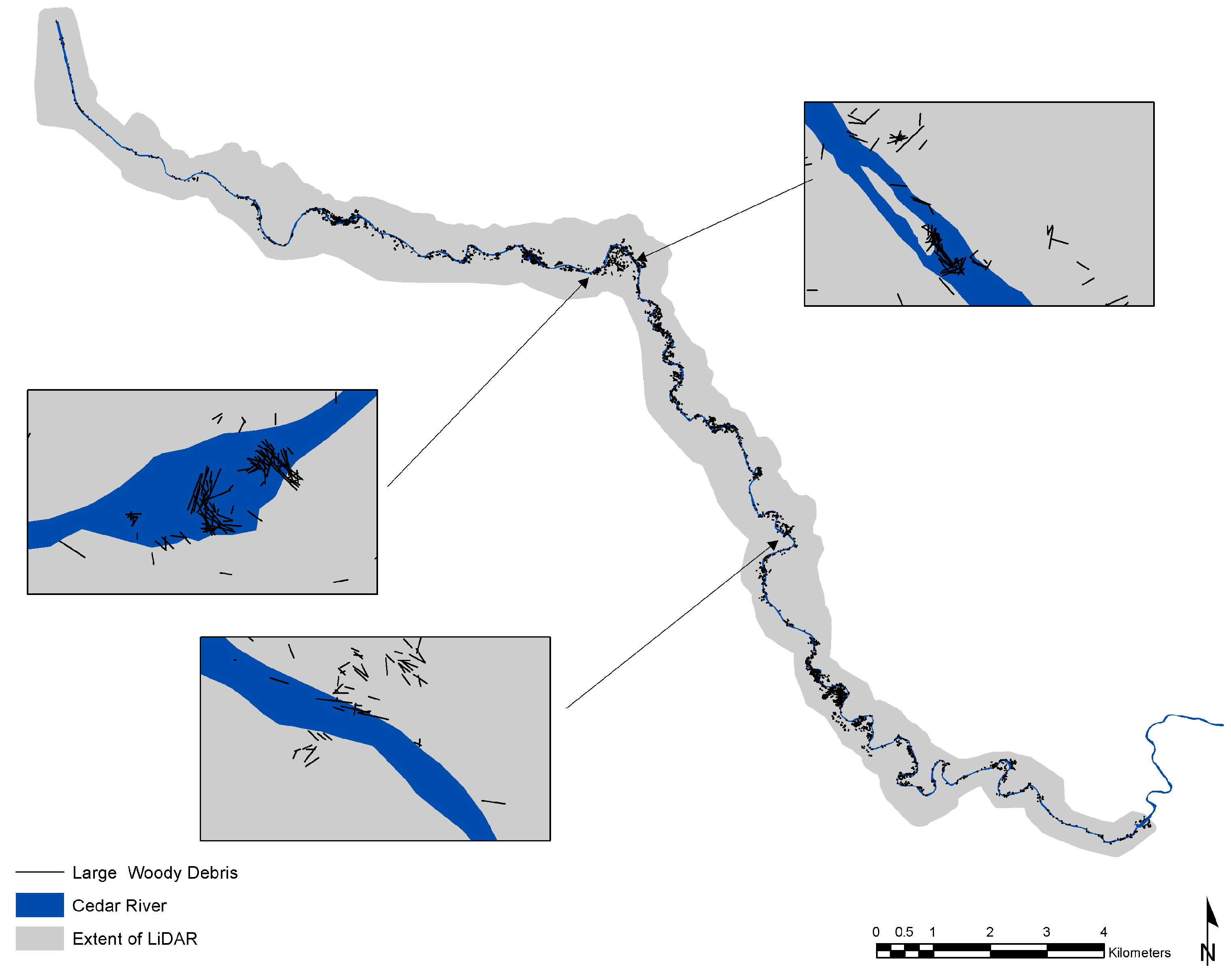
3.2. LWD Identification, Manual Method
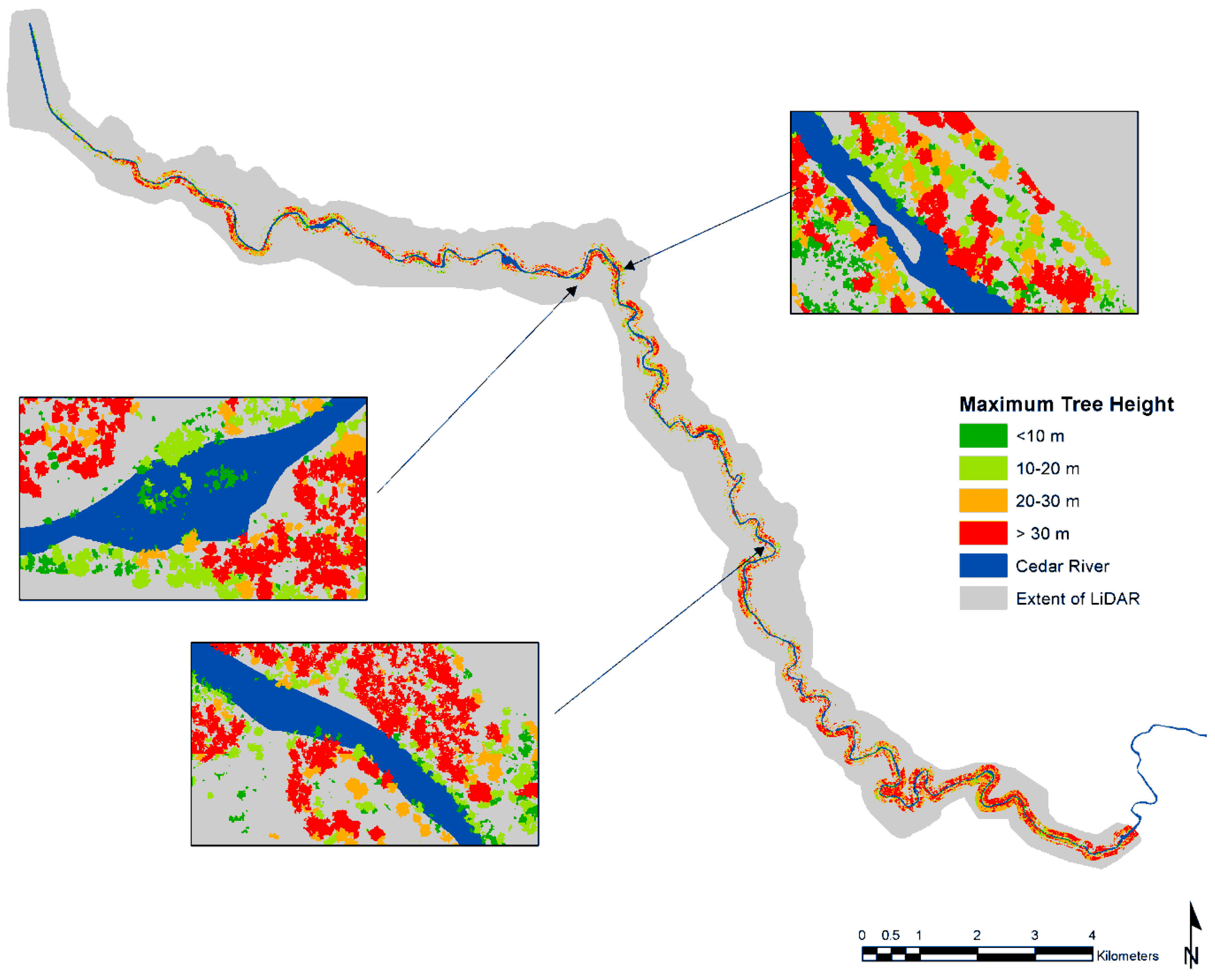
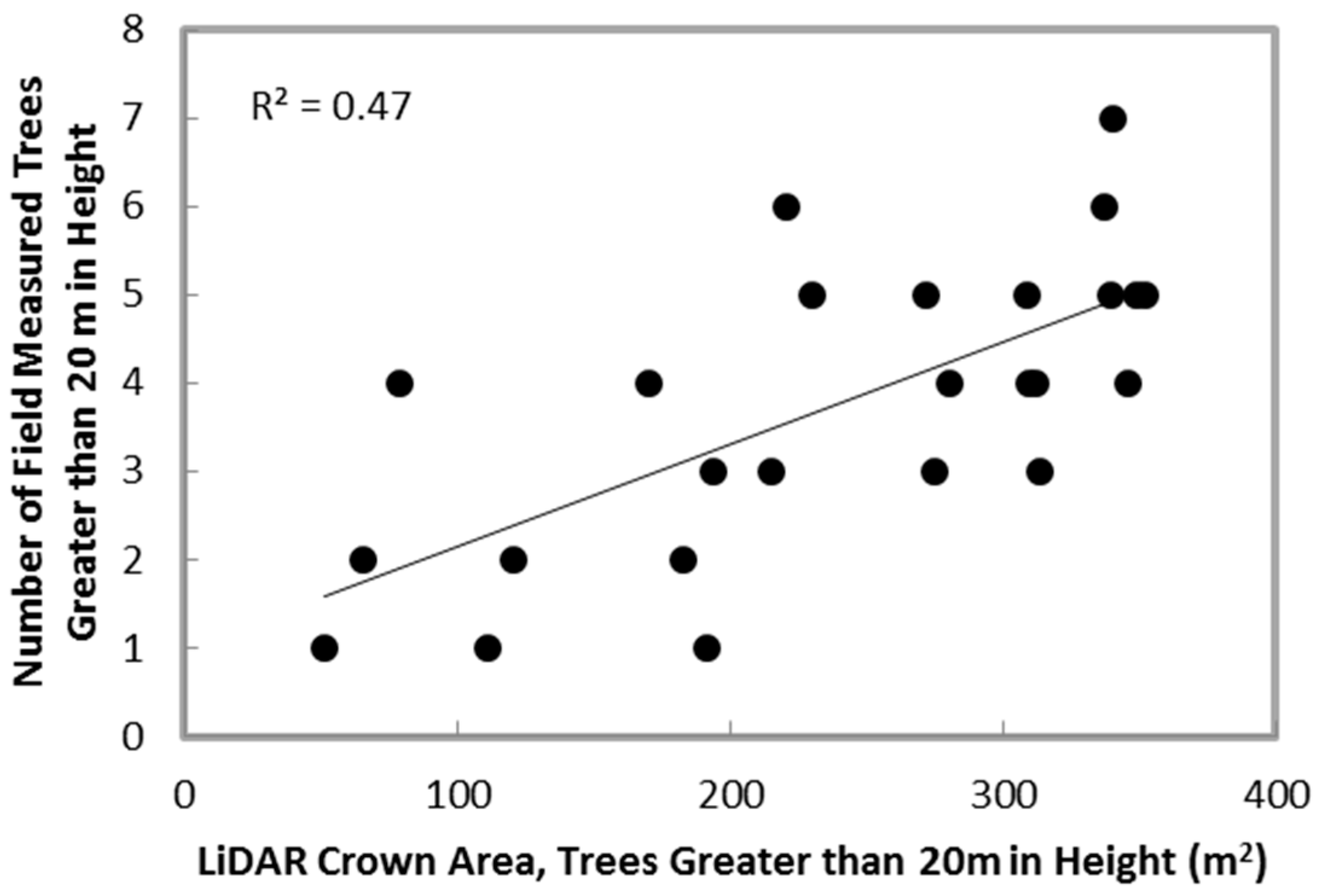
3.3. Individual Tree Identification
4. Discussion
4.1. Automated Versus Manual Identification of LWD
4.2. Large Wood Accumulations
4.3. Strengths and Limitations of the Individual Tree Analysis
4.4. Recommendations for Integrated Monitoring and Future Research
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Abbe, T.B.; Montgomery, D.R. Large woody debris jams, channel hydraulics and habitat formation in large rivers. Regul. Rivers Res. Manag. 1996, 12, 201–221. [Google Scholar] [CrossRef]
- Sollins, P. Input and decay of coarse woody debris in coniferous stands in western Oregon and Washington. Can. J. For. Res. Revue Can. Rech. For. 1982, 12, 18–28. [Google Scholar] [CrossRef]
- Angermeier, P.L.; Karr, J.R. Relationships between woody debris and fish habitat in a small warmwater stream. Trans. Am. Fish. Soc. 1984, 113, 716–726. [Google Scholar] [CrossRef]
- Beechie, T.J.; Sibley, T.H. Relationships between channel characteristics, woody debris, and fish habitat in northwestern Washington streams. Trans. Am. Fish. Soc. 1997, 126, 217–229. [Google Scholar] [CrossRef]
- Moulin, B.; Piegay, H. Characteristics and temporal variability of large woody debris trapped in a reservoir on the River Rhone (Rhone): Implications for river basin management. River Res. Appl. 2004, 20, 79–97. [Google Scholar] [CrossRef]
- Mazzorana, B.; Comiti, F.; Volcan, C. Determining flood hazard patterns through a combined stochastic-deterministic approach. Nat. Hazards 2011, 59, 301–316. [Google Scholar] [CrossRef]
- Schmocker, L.; Hager, W.H. Probability of drift blockage at bridge. Decks. J. Hydraul. Eng. 2011, 137, 470–479. [Google Scholar] [CrossRef]
- Biedenweg, K.; Akyuz, K.; Skeele, R. Balancing riparian management and river recreation: methods and applications for exploring floater behavior and their interaction with large wood. Environ. Manag. 2012, 50, 283–295. [Google Scholar] [CrossRef] [PubMed]
- Schuett-Hames, D.; Pleus, A.E.; Ward, J.; Fox, M.; Light, J. TFW Monitoring Program Method Manual for the Large Woody Debris Survey; Washington Department of Natural Resources: Olympia, WA, USA, 1999. [Google Scholar]
- Leckie, D.G.; Cloney, E.E.; Jay, C.; Paradine, D. Automated mapping of stream features with high-resolution multispectral imagery: An. example of the capabilities. Photogramm. Eng. Remote Sens. 2005, 71, 145–155. [Google Scholar] [CrossRef]
- Marcus, W.A.; Legleiter, C.J.; Aspinall, R.J.; Boardman, J.W.; Crabtree, R.L. High spatial resolution hyperspectral mapping of in-stream habitats, depths, and woody debris in mountain streams. Geomorphology 2003, 55, 363–380. [Google Scholar] [CrossRef]
- Marcus, W.A.; Marston, R.A.; Colvard, C.R., Jr.; Gray, R.D. Mapping the spatial and temporal distributions of woody debris in streams of the Greater Yellowstone Ecosystem, USA. Geomorphology 2002, 44, 323–335. [Google Scholar] [CrossRef]
- Smikrud, K.M.; Prakash, A. Monitoring large woody debris dynamics in the Unuk River, Alaska using digital aerial photography. Gisci. Remote Sens. 2006, 43, 142–154. [Google Scholar] [CrossRef]
- Pasher, J.; King, D.J. Mapping dead wood distribution in a temperate hardwood forest using high resolution airborne imagery. For. Ecol. Manag. 2009, 258, 1536–1548. [Google Scholar] [CrossRef]
- Eamer, J.B.R.; Walker, I.J. Quantifying sand storage capacity of large woody debris on beaches using LiDAR. Geomorphology 2010, 118, 33–47. [Google Scholar] [CrossRef]
- Pesonen, A.; Maltamo, M.; Kangas, A. The comparison of airborne laser scanning-based probability layers as auxiliary information for assessing coarse woody debris. Int. J. Remote Sens. 2010, 31, 1245–1259. [Google Scholar] [CrossRef]
- Mucke, W.; Deák, B.; Schroiff, A.; Hollaus, M.; Pfeifer, N. Detection of fallen trees in forested areas using small footprint airborne laser scanning data. Can. J. Remote Sens. 2013, 39, S32–S40. [Google Scholar] [CrossRef]
- Blanchard, S.D.; Jakubowski, M.K.; Kelly, M. Object-Based image analysis of downed logs in disturbed forested landscapes using LiDAR. Remote Sens. 2011, 3, 2420–2439. [Google Scholar] [CrossRef]
- Nystrom, M.; Holmgren, J.; Fransson, J.E.S.; Olsson, H. Detection of windthrown trees using airborne laser scanning. Int. J. Appl. Earth Obs. Geoinf. 2014, 30, 21–29. [Google Scholar] [CrossRef]
- Richardson, J.J.; Moskal, L.M. Strengths and limitations of assessing forest density and spatial configuration with aerial LiDAR. Remote Sens. Environ. 2011, 115, 2640–2651. [Google Scholar] [CrossRef]
- Reitberger, J.; Schnörr, C.; Krzystek, P.; Stilla, U. 3D segmentation of single trees exploiting full waveform LiDAR data. ISPRS J. Photogramm. Remote Sens. 2009, 64, 561–574. [Google Scholar] [CrossRef]
- Hirata, Y.; Furuya, N.; Suzuki, M.; Yamamoto, H. Airborne laser scanning in forest management: Individual tree identification and laser pulse penetration in a stand with different levels of thinning. For. Ecol. Manag. 2009, 258, 752–760. [Google Scholar] [CrossRef]
- Andersen, H.E. Using airborne Light Detection and Ranging (LiDAR) to characterize forest stand. condition on the Kenai Peninsula of Alaska. West. J. Appl. For. 2009, 24, 95–102. [Google Scholar]














© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Richardson, J.J.; Moskal, L.M. An Integrated Approach for Monitoring Contemporary and Recruitable Large Woody Debris. Remote Sens. 2016, 8, 778. https://doi.org/10.3390/rs8090778
Richardson JJ, Moskal LM. An Integrated Approach for Monitoring Contemporary and Recruitable Large Woody Debris. Remote Sensing. 2016; 8(9):778. https://doi.org/10.3390/rs8090778
Chicago/Turabian StyleRichardson, Jeffrey J., and L. Monika Moskal. 2016. "An Integrated Approach for Monitoring Contemporary and Recruitable Large Woody Debris" Remote Sensing 8, no. 9: 778. https://doi.org/10.3390/rs8090778
APA StyleRichardson, J. J., & Moskal, L. M. (2016). An Integrated Approach for Monitoring Contemporary and Recruitable Large Woody Debris. Remote Sensing, 8(9), 778. https://doi.org/10.3390/rs8090778