Raman Lidar Observations of Aerosol Optical Properties in 11 Cities from France to Siberia

Abstract
:
1. Introduction
2. Field Experiment
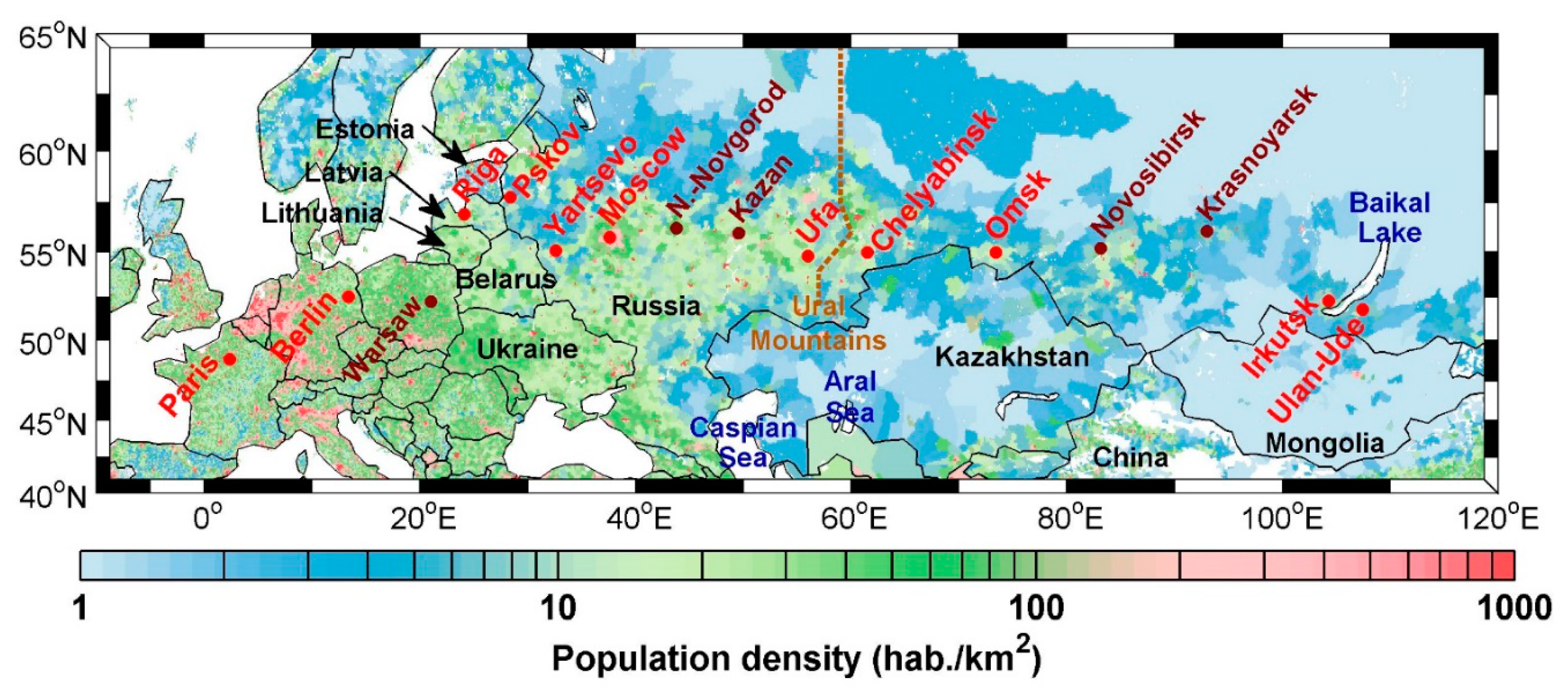
2.1. Itinerary of the Campaign
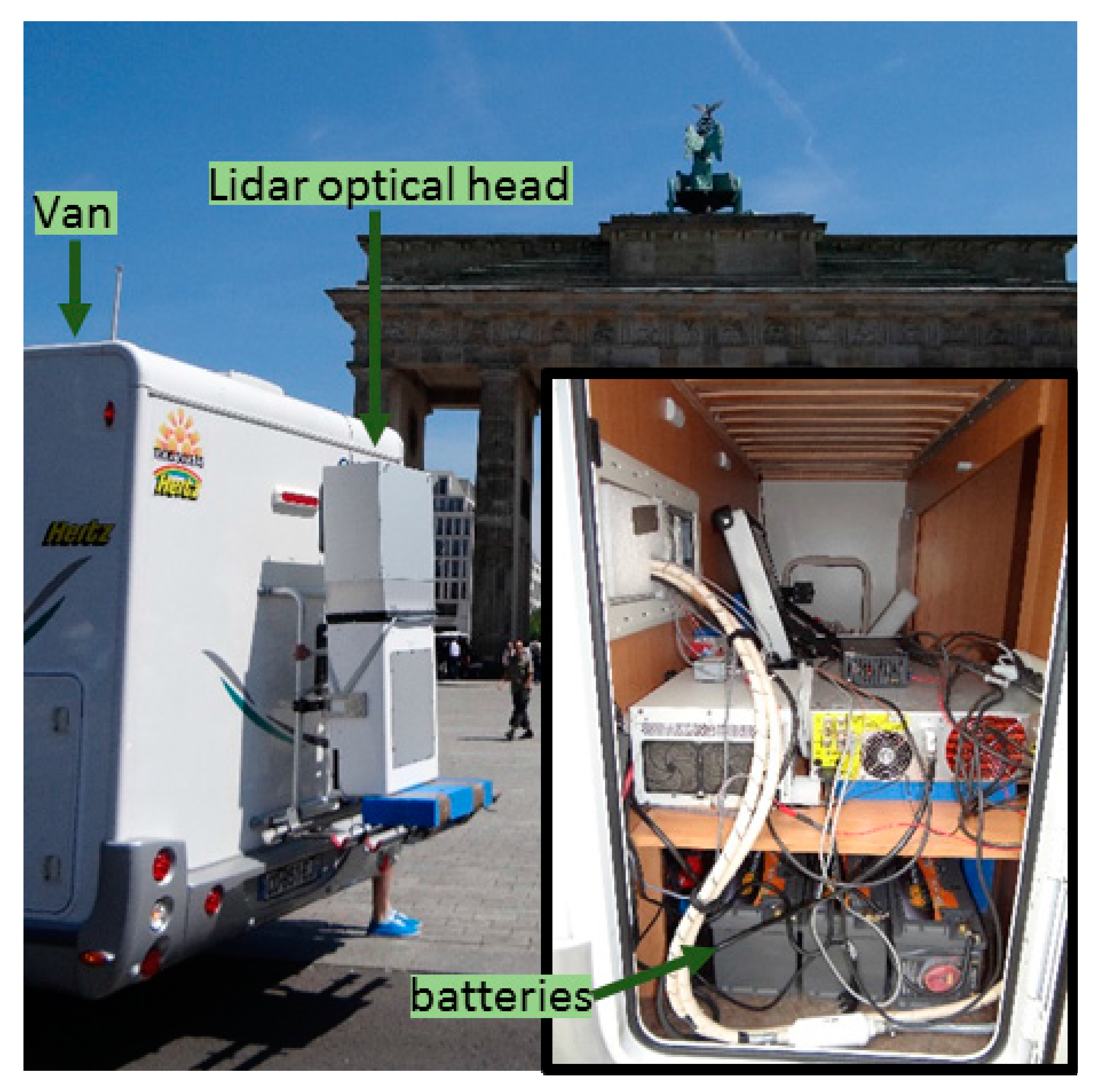
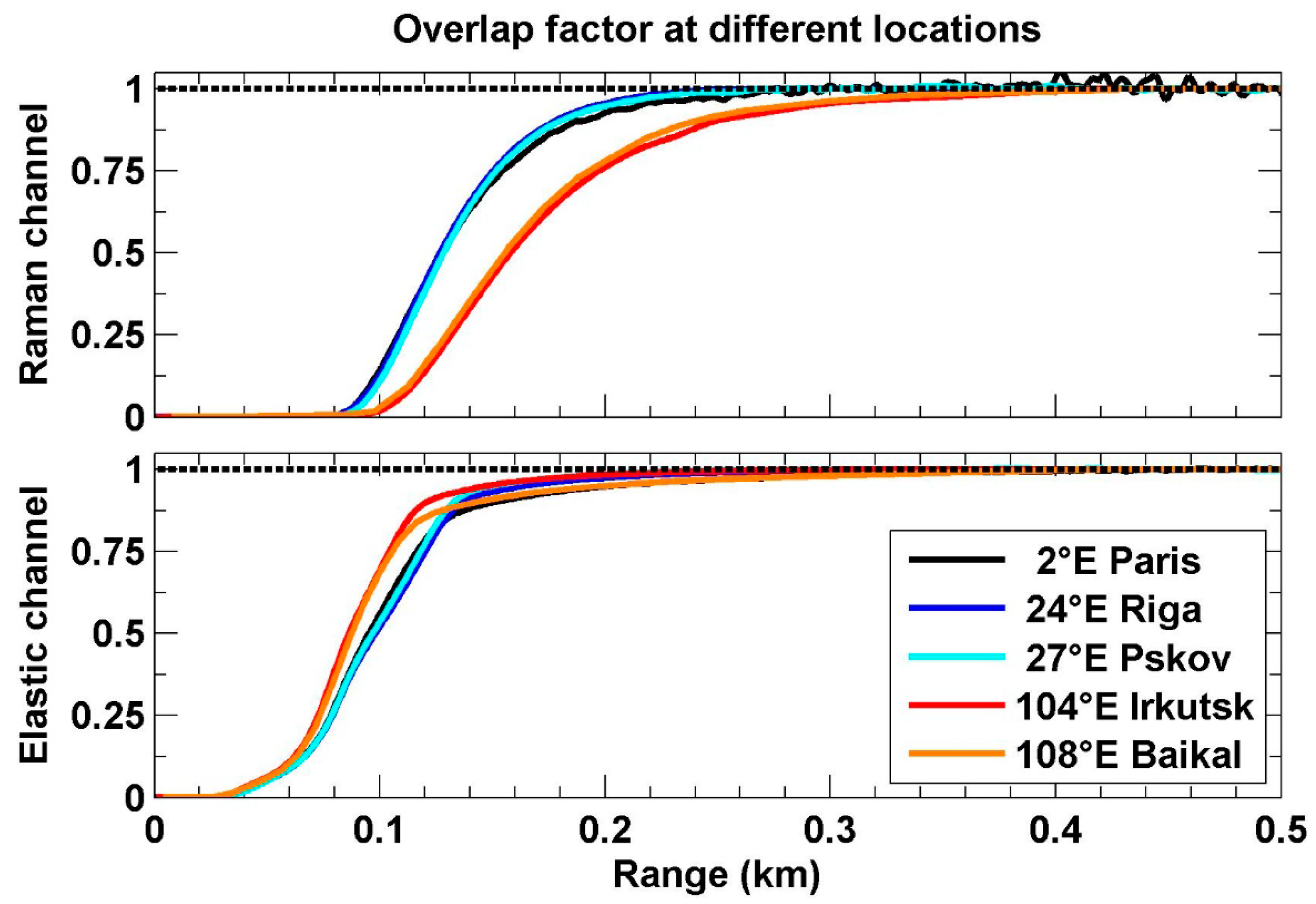
2.2. Instrumentation
3. Data Processing
3.1. Retrieval of the LR and ABC
3.2. Retrieval of the PDR
4. Case Studies
4.1. Paris
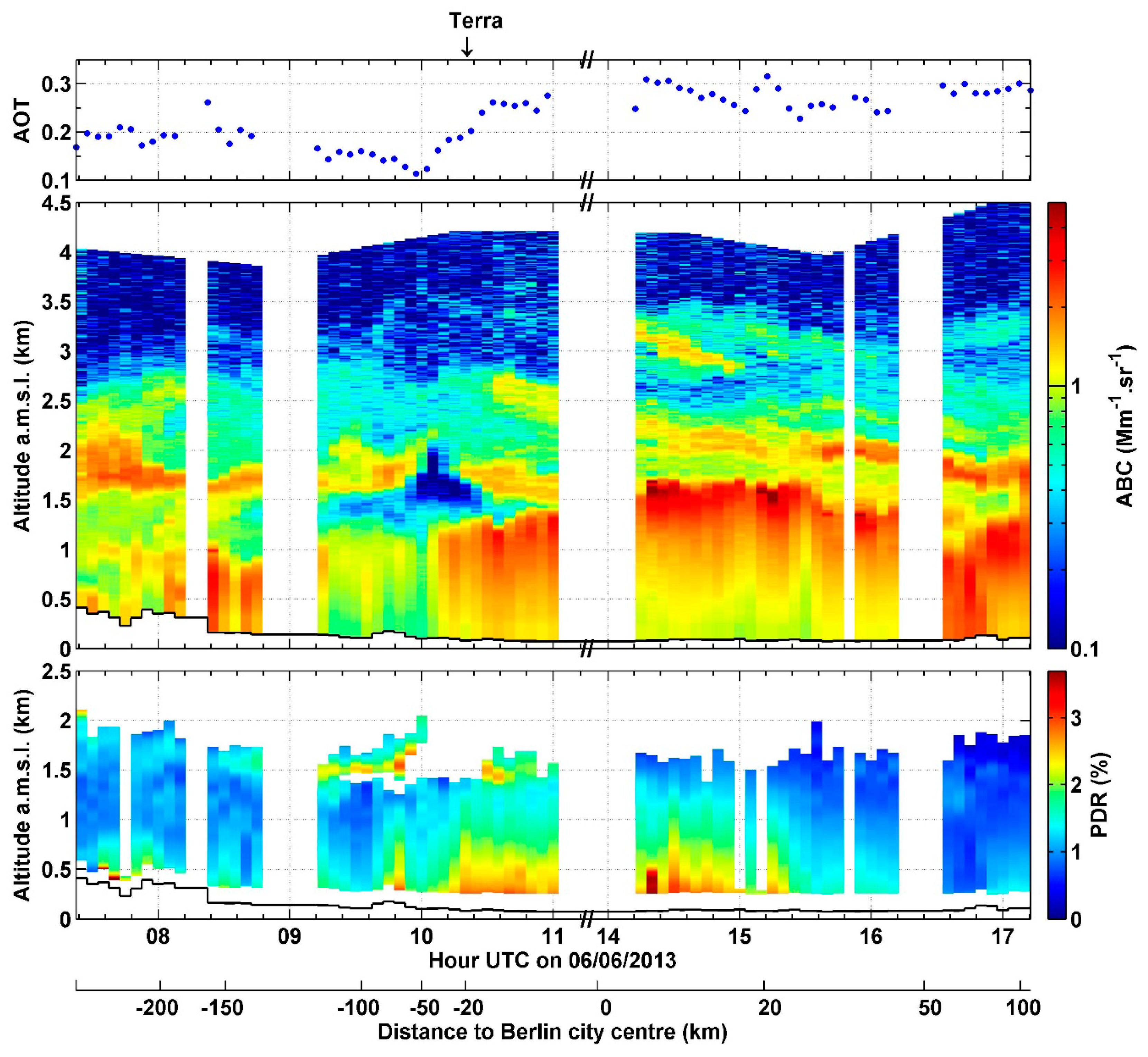
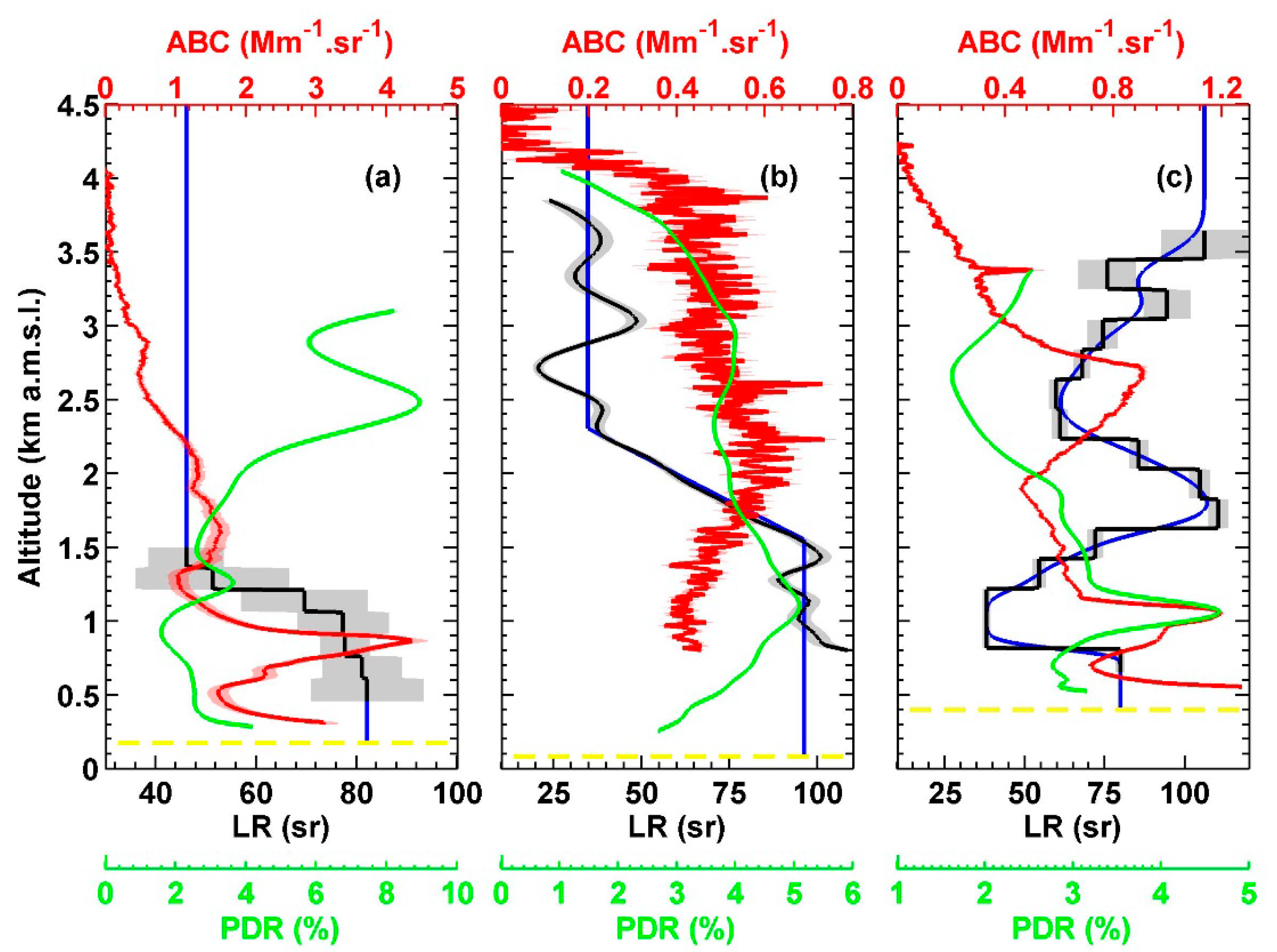
4.2. Berlin
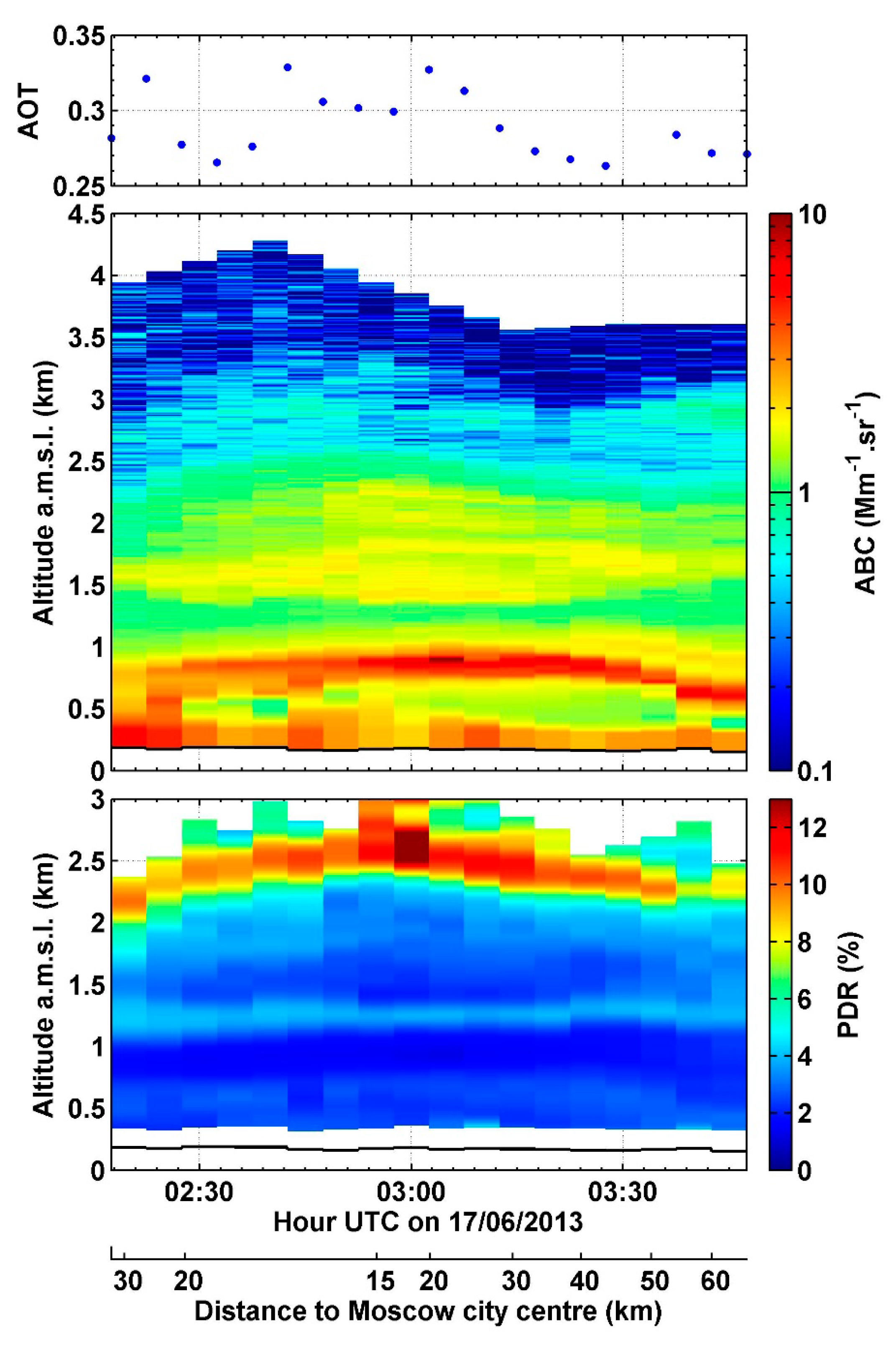
4.3. Moscow
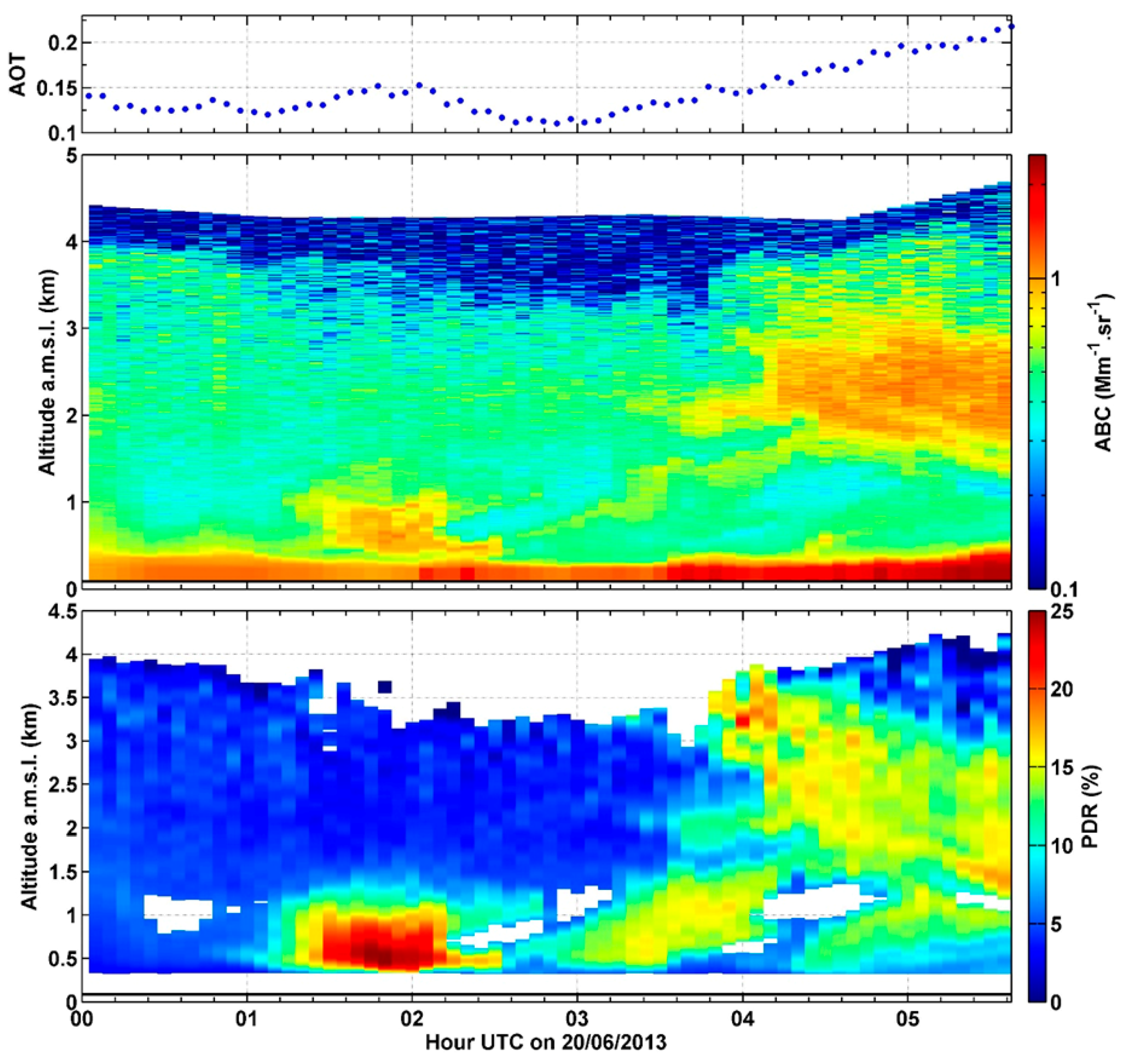
4.4. Ufa
4.5. Irkutsk
4.6. Other Cities
5. Discussion
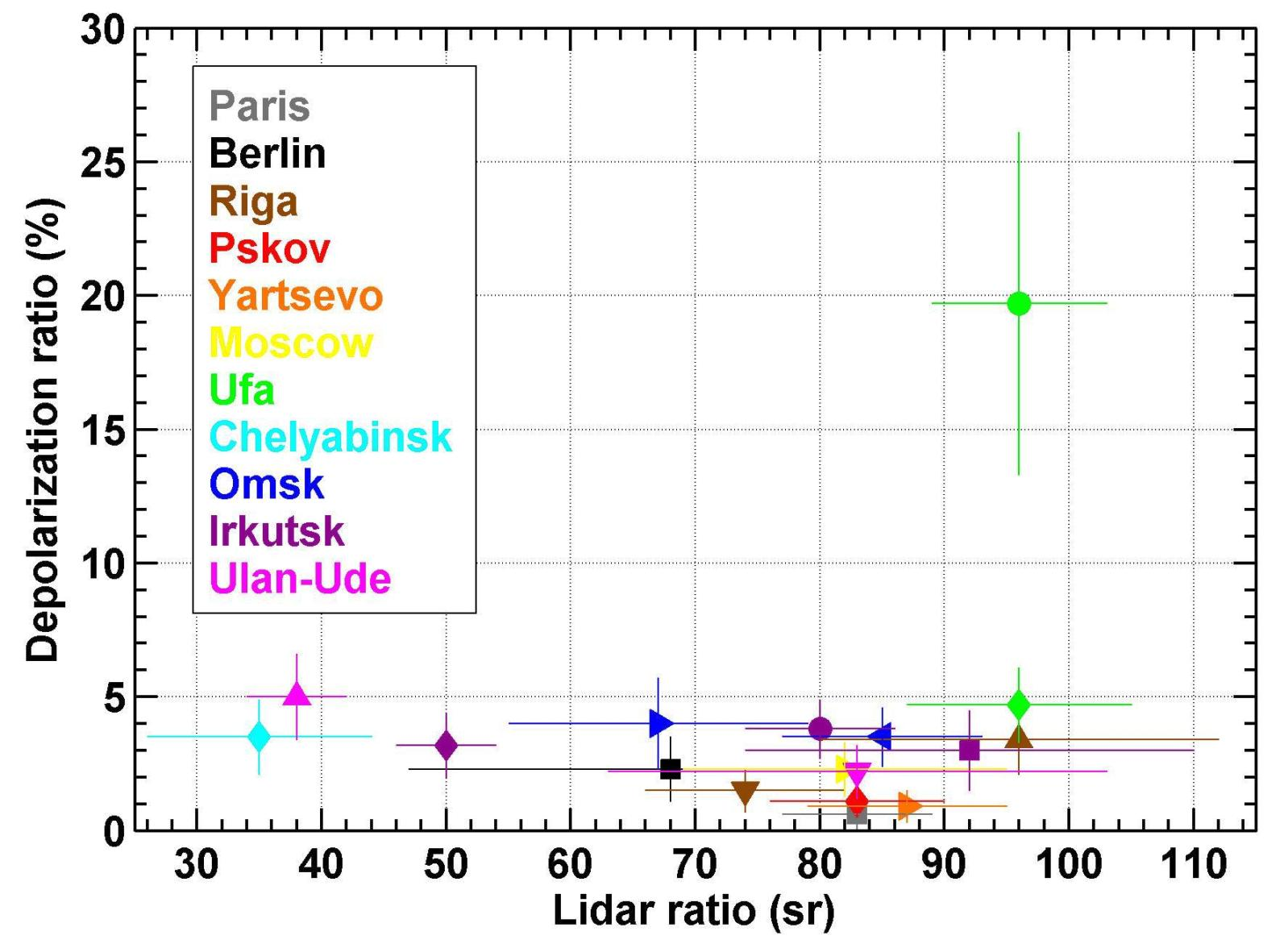
5.1. General Behaviour of the LR
5.2. General Behaviour of the PDR
5.3. Comparison with CALIOP Space-Borne Observations
5.4. Russian Peculiar Feature: Unidentified Aerosols above Ufa
6. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Error Budget on the LR and PDR Values

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| City (Layer) | Average Value | Total Uncertainty | Ångström Hypothesis | Normalization Uncertainty | Photon Noise Uncertainty | Space Variability | AOT Uncertainty |
|---|---|---|---|---|---|---|---|
| Paris (morning BL) Raman CKI | 83 | 6 | 3.3 | 5.0 | 0.3 | – | – |
| lidar/AERONET synergy | 83 | 18 | 3.3 | 5.0 | 0.2 | – | 16.5 |
| Berlin (midday BL) | 68 | 21 | 2.7 | 4.1 | 0.7 | – | 20.4 |
| Riga (lower/upper sublayers in residual layer) | 96 | 16 | 3.8 | 5.7 | 2.8 | 13.2 | – |
| 74 | 8 | 3.0 | 4.4 | 2.5 | 4.1 | – | |
| Pskov (residual layer) | 84 | 7 | 3.2 | 5.0 | 1.5 | 3.2 | – |
| Yartsevo (residual layer) | 87 | 8 | 3.5 | 5.2 | 3.4 | 0.3 | – |
| Moscow (residual layer) | 82 | 13 | 3.3 | 4.9 | 11.3 | – | – |
| Ufa (residual layer) | 96 | 9 | 3.8 | 5.7 | 3.2 | 3.5 | – |
| (pollution plume) | 96 | 7 | 3.9 | 5.8 | 0.3 | – | – |
| Chelyabinsk (residual layer) | 85 | 8 | 3.4 | 5.1 | 2.7 | 2.5 | – |
| Omsk (residual layer, after sunset) | 67 | 12 | 2.7 | 4.0 | 4.1 | 10.1 | – |
| (residual layer, middle of night) | 92 | 18 | 3.7 | 5.5 | 4.9 | 15.9 | – |
| Irkutsk (afternoon BL) | 50 | 4 | 2.0 | 3.0 | 0.1 | – | – |
| (nocturnal BL) | 80 | 6 | 3.2 | 4.8 | 1.3 | – | – |
| (night, pollution plume) | 38 | 4 | 1.5 | 2.3 | 1.3 | – | – |
| Ulan-Ude (lower/upper sublayers in residual layer) | 48 | 9 | 1.9 | 2.9 | 0.3 | 7.9 | – |
| 71 | 8 | 2.8 | 4.3 | 0.4 | 7.4 | – |
| City (Layer) | Average Value | Total Uncertainty | Calibration Error | Space Variability | LR Uncertainty |
|---|---|---|---|---|---|
| Paris (morning BL) | 0.6 | 0.7 | 0.1 | 0.3 | 0.1 |
| Berlin (midday BL) | 2.3 | 1.2 | 0.6 | 0.4 | 0.7 |
| Riga (lower/upper sublayers in residual layer) | 3.4 | 1.3 | 0.8 | 0.4 | 0.5 |
| 1.5 | 0.8 | 0.4 | 0.3 | 0.1 | |
| Pskov (residual layer) | 1.1 | 0.6 | 0.3 | 0.1 | 0.1 |
| Yartsevo (residual layer) | 0.9 | 0.6 | 0.2 | 0.1 | 0.1 |
| Moscow (residual layer) | 2.3 | 1.0 | 0.6 | 0.5 | 0.4 |
| Ufa (residual layer) | 4.7 | 1.4 | 1.1 | 0.3 | 0.4 |
| (pollution plume) | 19.7 | 6.4 | 4.7 | 4.0 | 1.4 |
| Chelyabinsk (residual layer) | 3.5 | 1.1 | 0.8 | 0.2 | 0.3 |
| Omsk (residual layer, after sunset) | 4.0 | 1.7 | 1.0 | 1.0 | 0.8 |
| (residual layer, middle of night) | 3.0 | 1.5 | 0.7 | 1.0 | 0.6 |
| Irkutsk (afternoon BL) | 3.2 | 1.2 | 0.8 | 0.7 | 0.2 |
| (nocturnal BL) | 3.8 | 1.1 | 0.9 | 0.2 | 0.3 |
| (night, pollution plume) | 5.0 | 1.6 | 1.2 | 0.8 | 0.4 |
| Ulan-Ude (lower/upper sublayers in residual layer) | 1.9 | 0.8 | 0.5 | 0.1 | 0.3 |
| 1.3 | 0.7 | 0.3 | 0.3 | 0.2 |
References
- Intergovernmental Panel on Climate Change (IPCC). Climate Change 2013: The Physical Science Basis. Contribution of Working Group I to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Stocker, T.F., Qin, D., Plattner, G.-K., Tignor, M., Allen, S.K., Boschung, J., Nauels, A., Xia, Y., Bex, V., Midgley, P.M., Eds.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2013; ISBN 978-1-107-66182-0. [Google Scholar]
- Granier, C.; Bessagnet, B.; Bond, T.; D’Angiola, A.; van der Gon, H.D.; Frost, G.J.; Heil, A.; Kaiser, J.W.; Kinne, S.; Klimont, Z.; et al. Evolution of anthropogenic and biomass burning emissions of air pollutants at global and regional scales during the 1980–2010 period. Clim. Chang. 2011, 109, 163–190. [Google Scholar] [CrossRef]
- Holben, B.N.; Eck, T.F.; Slutsker, I.; Tanré, D.; Buis, J.P.; Setzer, A.; Vermote, E.; Reagan, J.A.; Kaufman, Y.J.; Nakajima, T.; et al. AERONET—A Federated Instrument Network and Data Archive for Aerosol Characterization. Remote Sens. Environ. 1998, 66, 1–16. [Google Scholar] [CrossRef]
- Welton, E.; Campbell, J.; Spinhirne, J.; Scott, V. Global monitoring of clouds and aerosols using a network of micro-pulse lidar systems. Proc. SPIE 2001, 151–158. [Google Scholar] [CrossRef]
- Pappalardo, G.; Amodeo, A.; Apituley, A.; Comeron, A.; Freudenthaler, V.; Linné, H.; Ansmann, A.; Bösenberg, J.; D’Amico, G.; Mattis, I.; et al. EARLINET: Towards an advanced sustainable European aerosol lidar network. Atmos. Meas. Tech. 2014, 7, 2389–2409. [Google Scholar] [CrossRef] [Green Version]
- Bates, T.S.; Huebert, B.J.; Gras, J.L.; Griffiths, F.B.; Durkee, P.A. International Global Atmospheric Chemistry (IGAC) Project’s First Aerosol Characterization Experiment (ACE 1): Overview. J. Geophys. Res. 1998, 103, 16297–16318. [Google Scholar] [CrossRef]
- Raes, F.; Bates, T.; McGovern, F.; Van Liedekerke, M. The 2nd Aerosol Characterization Experiment (ACE-2): General overview and main results. Tellus B 2000, 52, 111–125. [Google Scholar] [CrossRef]
- Flamant, C.; Pelon, J.; Chazette, P.; Trouillet, V.; Quinn, P.K.; Frouin, R.; Bruneau, D.; Leon, J.F.; Bates, T.S.; Johnson, J.; et al. Airborne lidar measurements of aerosol spatial distribution and optical properties over the Atlantic Ocean during a European pollution outbreak of ACE-2. Tellus B 2000, 52, 662–677. [Google Scholar] [CrossRef]
- Huebert, B.J.; Bates, T.S.; Russell, P.B.; Shi, G.; Kim, Y.J.; Kawamura, K.; Carmichael, G.; Nakajima, T. An overview of ACE-Asia: Strategies for quantifying the relationships between Asian aerosols and their climatic impacts. J. Geophys. Res. 2003, 108, 8633. [Google Scholar] [CrossRef]
- Ramanathan, V.; Crutzen, P.J.; Lelieveld, J.; Mitra, A.P.; Althausen, D.; Anderson, J.; Andreae, M.O.; Cantrell, W.; Cass, G.R.; Chung, C.E.; et al. Indian Ocean Experiment: An integrated analysis of the climate forcing and effects of the great Indo-Asian haze. J. Geophys. Res. 2001, 106, 28371. [Google Scholar] [CrossRef]
- Pelon, J.; Flamant, C.; Chazette, P.; Leon, J.F.; Tanre, D.; Sicard, M.; Satheesh, S.K. Characterization of aerosol spatial distribution and optical properties over the Indian Ocean from airborne LIDAR and radiometry during INDOEX’99. J. Geophys. Res. 2002, 107, 8029. [Google Scholar] [CrossRef]
- Law, K.S.; Stohl, A.; Quinn, P.K.; Brock, C.A.; Burkhart, J.F.; Paris, J.D.; Ancellet, G.; Singh, H.B.; Roiger, A.; Schlager, H.; et al. Arctic air pollution: New insights from POLARCAT-IPY. Bull. Am. Meteorol. Soc. 2014, 95, 1873–1895. [Google Scholar] [CrossRef]
- Kulmala, M.; Asmi, A.; Lappalainen, H.K.; Baltensperger, U.; Brenguier, J.L.; Facchini, M.C.; Hansson, H.C.; Hov, Ø.; O’Dowd, C.D.; Pöschl, U.; et al. General overview: European Integrated project on Aerosol Cloud Climate and Air Quality interactions (EUCAARI)-integrating aerosol research from nano to global scales. Atmos. Chem. Phys. 2011, 11, 13061–13143. [Google Scholar] [CrossRef] [Green Version]
- Molina, L.T.; Madronich, S.; Gaffney, J.S.; Apel, E.; De Foy, B.; Fast, J.; Ferrare, R.; Herndon, S.; Jimenez, J.L.; Lamb, B.; et al. An overview of the MILAGRO 2006 Campaign: Mexico City emissions and their transport and transformation. Atmos. Chem. Phys. 2010, 10, 8697–8760. [Google Scholar] [CrossRef] [Green Version]
- McMeeking, G.R.; Bart, M.; Chazette, P.; Haywood, J.M.; Hopkins, J.R.; McQuaid, J.B.; Morgan, W.T.; Raut, J.C.; Ryder, C.L.; Savage, N.; et al. Airborne measurements of trace gases and aerosols over the London metropolitan region. Atmos. Chem. Phys. 2012, 12, 5163–5187. [Google Scholar] [CrossRef] [Green Version]
- Vautard, R.; Menut, L.; Beekmann, M.; Chazette, P.; Flamant, P.H.; Gombert, D.; Guédalia, D.; Kley, D.; Lefebvre, M.-P.; Martin, D.; et al. A synthesis of the Air Pollution Over the Paris Region (ESQUIF) field campaign. J. Geophys. Res. 2003, 108, 8558. [Google Scholar] [CrossRef]
- Chazette, P.; Randriamiarisoa, H.; Sanak, J.; Couvert, P.; Flamant, C. Optical properties of urban aerosol from airborne and ground-based in situ measurements performed during the Etude et Simulation de la Qualité de l’air en Ile de France (ESQUIF) program. J. Geophys. Res. 2005, 110, 1–18. [Google Scholar] [CrossRef]
- Raut, J.-C.; Chazette, P. Retrieval of aerosol complex refractive index from a synergy between lidar, sunphotometer and in situ measurements during LISAIR experiment. Atmos. Chem. Phys. Atmos. Chem. Phys. 2007, 7, 2797–2815. [Google Scholar] [CrossRef]
- Royer, P.; Chazette, P.; Sartelet, K.; Zhang, Q.J.; Beekmann, M.; Raut, J.C. Comparison of lidar-derived PM10 with regional modeling and ground-based observations in the frame of MEGAPOLI experiment. Atmos. Chem. Phys. 2011, 11, 10705–10726. [Google Scholar] [CrossRef] [Green Version]
- Baklanov, A.; Lawrence, M.; Pandis, S. MEGAPOLI Project Homepage. Available online: http://megapoli.dmi.dk/ (accessed on 22 September 2017).
- Ansmann, A.; Engelmann, R.; Althausen, D.; Wandinger, U.; Hu, M.; Zhang, Y.; He, Q. High aerosol load over the Pearl River Delta, China, observed with Raman lidar and Sun photometer. Geophys. Res. Lett. 2005, 32, 13815. [Google Scholar] [CrossRef]
- Tesche, M.; Ansmann, A.; Müller, D.; Althausen, D.; Engelmann, R.; Hu, M.; Zhang, Y. Particle backscatter, extinction, and lidar ratio profiling with Raman lidar in south and north China. Appl. Opt. 2007, 46, 6302–6308. [Google Scholar] [CrossRef] [PubMed]
- Heese, B.; Baars, H.; Bohlmann, S.; Althausen, D.; Deng, R. Continuous vertical aerosol profiling with a multi-wavelength Raman polarization lidar over the Pearl River Delta, China. Atmos. Chem. Phys. 2017, 17, 6679–6691. [Google Scholar] [CrossRef]
- Komppula, M.; Mielonen, T.; Arola, A.; Korhonen, K.; Lihavainen, H.; Hyvärinen, A.P.; Baars, H.; Engelmann, R.; Althausen, D.; Ansmann, A.; et al. Technical Note: One year of Raman-lidar measurements in Gual Pahari EUCAARI site close to New Delhi in India-Seasonal characteristics of the aerosol vertical structure. Atmos. Chem. Phys. 2012, 12, 4513–4524. [Google Scholar] [CrossRef] [Green Version]
- Hänel, A.; Baars, H.; Althausen, D.; Ansmann, A.; Engelmann, R.; Sun, J.Y. One-year aerosol profiling with EUCAARI Raman lidar at Shangdianzi GAW station: Beijing plume and seasonal variations. J. Geophys. Res. 2012, 117, D13202. [Google Scholar] [CrossRef]
- Léon, J.-F.; Chazette, P.; Dulac, F.; Pelon, J.; Flamant, C.; Bonazzola, M.; Foret, G.; Alfaro, S.C.; Cachier, H.; Cautenet, S.; et al. Large-scale advection of continental aerosols during INDOEX. J. Geophys. Res. 2001, 106, 28427–28439. [Google Scholar] [CrossRef]
- Golitsyn, G.; Gillette, D.A. Introduction: A joint Soviet-American experiment for the study of Asian desert dust and its impact on local meteorological conditions and climate. Atmos. Environ. Part A. Gen. Top. 1993, 27, 2467–2470. [Google Scholar] [CrossRef]
- Panchenko, M.V.; Zhuravleva, T.B.; Terpugova, S.A.; Polkin, V.V.; Kozlov, V.S. An empirical model of optical and radiative characteristics of the tropospheric aerosol over West Siberia in summer. Atmos. Meas. Tech. 2012, 5, 1513–1527. [Google Scholar] [CrossRef] [Green Version]
- Matvienko, G.G.; Belan, B.D.; Panchenko, M.V.; Romanovskii, O.A.; Sakerin, S.M.; Kabanov, D.M.; Turchinovich, S.A.; Turchinovich, Y.S.; Eremina, T.A.; Kozlov, V.S.; et al. Complex experiment on studying the microphysical, chemical, and optical properties of aerosol particles and estimating the contribution of atmospheric aerosol-to-earth radiation budget. Atmos. Meas. Tech. 2015, 8, 4507–4520. [Google Scholar] [CrossRef]
- Paris, J.D.; Ciais, P.; Nédélec, P.; Stohl, A.; Belan, B.D.; Arshinov, M.Y.; Carouge, C.; Golitsyn, G.S.; Granberg, I.G. New insights on the chemical composition of the siberian air shed from the YAK-AEROSIB aircraft campaigns. Bull. Am. Meteorol. Soc. 2010, 91, 625–641. [Google Scholar] [CrossRef]
- Heintzenberg, J.; Birmili, W.; Seifert, P.; Panov, A.; Chi, X.; Andreae, M.O. Mapping the aerosol over Eurasia from the Zotino tall tower. Tellus, Ser. B Chem. Phys. Meteorol. 2013, 65, 20062. [Google Scholar] [CrossRef] [Green Version]
- Panov, A.V.; Sukachev, V.N.; Lavric, J.V. ZOTTO Project Homepage. Available online: http://www.zottoproject.org/ (accessed on 22 September 2017).
- Chubarova, N.Y.; Poliukhov, A.A.; Gorlova, I.D. Long-term variability of aerosol optical thickness in Eastern Europe over 2001–2014 according to the measurements at the Moscow MSU MO AERONET site with additional cloud and NO2 correction. Atmos. Meas. Tech. 2016, 9, 313–334. [Google Scholar] [CrossRef]
- Bazhenov, O.; Burlakov, V.; Dolgii, S.; Nevzorov, A.; Salnikova, N. Optical monitoring of characteristics of the stratospheric aerosol layer and total ozone content at the Siberian Lidar Station (Tomsk: 56°30′N; 85°E). Int. J. Remote Sens. 2015, 36, 3024–3032. [Google Scholar] [CrossRef]
- Zuev, V.V.; Burlakov, V.D.; Nevzorov, A.V.; Pravdin, V.L.; Savelieva, E.S.; Gerasimov, V.V. 30-year lidar observations of the stratospheric aerosol layer state over Tomsk (Western Siberia, Russia). Atmos. Chem. Phys. 2017, 17, 3067–3081. [Google Scholar] [CrossRef]
- Chen, B.B.; Sverdlik, L.G.; Imashev, S.A.; Solomon, P.A.; Lantz, J.; Schauer, J.J.; Shafer, M.M.; Artamonova, M.S.; Carmichael, G.R. Lidar Measurements of the Vertical Distribution of Aerosol Optical and Physical Properties over Central Asia. Int. J. Atmos. Sci. 2013, 2013, 7. [Google Scholar] [CrossRef]
- Hofer, J.; Althausen, D.; Abdullaev, S.; Makhmudov, A.; Nazarov, B.; Schettler, G.; Engelmann, R.; Baars, H.; Heinold, B.; Müller, K.; et al. Central Asian Dust Experiment (CADEX): First Year Lidar Observations. In Light, Energy and the Environment; OSA: Washington, DC, USA, 2016; p. EW2A.3. [Google Scholar]
- Salomonson, V.V; Barnes, W.L.L.; Maymon, P.W.; Montgomery, H.E.; Ostrow, H. MODIS: Advanced Facility Instrument for Studies of the Earth as a System. IEEE Trans. Geosci. Remote Sens. 1989, 27, 145–153. [Google Scholar] [CrossRef]
- King, M.D.; Kaufman, Y.J.; Menzel, W.P.; Tanré, D. Remote Sensing of Cloud, Aerosol, and Water Vapor Properties from the Moderate Resolution Imaging Spectrometer (MODIS). IEEE Trans. Geosci. Remote Sens. 1992, 30, 2–27. [Google Scholar] [CrossRef]
- Deuzé, J.L.; Bréon, F.M.; Devaux, C.; Goloub, P.; Herman, M.; Lafrance, B.; Maignan, F.; Marchand, A.; Nadal, F.; Perry, G.; et al. Remote sensing of aerosols over land surfaces from POLDER-ADEOS-1 polarized measurements. J. Geophys. Res. 2001, 106, 4913–4926. [Google Scholar] [CrossRef]
- Winker, D.M.; Pelon, J.R.; McCormick, M.P. The CALIPSO mission: Spaceborne lidar for observation of aerosols and clouds. Proc. SPIE 2003, 4893, 1–11. [Google Scholar] [CrossRef]
- Chazette, P.; Raut, J.C.; Dulac, F.; Berthier, S.; Kim, S.W.; Royer, P.; Sanak, J.; Loac, S.; Grigaut-Desbrosses, H. Simultaneous observations of lower tropospheric continental aerosols with a ground-based, an airborne, and the spaceborne CALIOP lidar system. J. Geophys. Res. 2010, 115, D00H31. [Google Scholar] [CrossRef]
- Dieudonné, E.; Chazette, P.; Marnas, F.; Totems, J.; Shang, X. Lidar profiling of aerosol optical properties from Paris to Lake Baikal (Siberia). Atmos. Chem. Phys. 2015, 15, 5007–5026. [Google Scholar] [CrossRef]
- Center for International Earth Science Information Network (CIESIN)—Columbia University. Gridded Population of the World, Version 4 (GPWv4): Population Density; NASA Socioeconomic Data and Applications Center (SEDAC): Palisades, NY, USA, 2016. [Google Scholar]
- Department of Economic and Social Affairs of the United Nations. Available online: https://esa.un.org/ (accessed on 22 September 2017).
- Davis, C.B.; Chmieliauskas, A.; Dijkema, G.P.J.; Nikolic, I. Enipedia. Available online: http://enipedia.tudelft.nl (accessed on 22 September 2017).
- Ulmishek, G.F. Petroleum Geology and Resources of the North Ustyurt Basin, Kazakhstan and Uzbekistan; US Department of the Interior, US Geological Survey: Reston, VA, USA, 2001; Volume 2201-D.
- Royer, P.; Chazette, P.; Lardier, M.; Sauvage, L. Aerosol content survey by mini N2-Raman lidar: Application to local and long-range transport aerosols. Atmos. Environ. 2011, 45, 7487–7495. [Google Scholar] [CrossRef]
- Ansmann, A.; Riebesell, M.; Weitkamp, C. Measurement of atmospheric aerosol extinction profiles with a Raman lidar. Opt. Lett. 1990, 15, 746–748. [Google Scholar] [CrossRef] [PubMed]
- Ansmann, A.; Wandinger, U.; Riebesell, M.; Weitkamp, C.; Michaelis, W. Independent measurement of extinction and backscatter profiles in cirrus clouds by using a combined Raman elastic-backscatter lidar. Appl. Opt. 1992, 31, 7113–7131. [Google Scholar] [CrossRef] [PubMed]
- Klett, J.D. Lidar inversion with variable backscatter/extinction ratios. Appl. Opt. 1985, 24, 1638–1643. [Google Scholar] [CrossRef] [PubMed]
- Berthier, S.; Chazette, P.; Couvert, P.; Pelon, J.; Dulac, F.; Thieuleux, F.; Moulin, C.; Pain, T. Desert dust aerosol columnar properties over ocean and continental Africa from Lidar in-Space Technology Experiment (LITE) and Meteosat synergy. J. Geophys. Res. Atmos. 2006, 111, D21202. [Google Scholar] [CrossRef]
- Royer, P.; Raut, J.-C.; Ajello, G.; Berthier, S.; Chazette, P. Synergy between CALIOP and MODIS instruments for aerosol monitoring: Application to the Po Valley. Atmos. Meas. Tech. 2010, 3, 893–907. [Google Scholar] [CrossRef] [Green Version]
- Chazette, P.; Dabas, A.; Sanak, J.; Lardier, M.; Royer, P. French airborne lidar measurements for Eyjafjallajökull ash plume survey. Atmos. Chem. Phys. 2012, 12, 7059–7072. [Google Scholar] [CrossRef]
- Noh, Y.M.; Lee, H.; Mueller, D.; Lee, K.; Shin, D.; Shin, S.; Choi, T.J.; Choi, Y.J.; Kim, K.R. Investigation of the diurnal pattern of the vertical distribution of pollen in the lower troposphere using LIDAR. Atmos. Chem. Phys. 2013, 13, 7619–7629. [Google Scholar] [CrossRef] [Green Version]
- Sassen, K. Boreal tree pollen sensed by polarization lidar: Depolarizing biogenic chaff. Geophys. Res. Lett. 2008, 35, L18810. [Google Scholar] [CrossRef]
- Burton, S.P.; Ferrare, R.A.; Hostetler, C.A.; Hair, J.W.; Rogers, R.R.; Obland, M.D.; Butler, C.F.; Cook, A.L.; Harper, D.B.; Froyd, K.D. Aerosol classification using airborne High Spectral Resolution Lidar measurements—Methodology and examples. Atmos. Meas. Tech. 2012, 5, 73–98. [Google Scholar] [CrossRef] [Green Version]
- Nicolae, D.; Nemuc, A.; Müller, D.; Talianu, C.; Vasilescu, J.; Belegante, L.; Kolgotin, A. Characterization of fresh and aged biomass burning events using multiwavelength Raman lidar and mass spectrometry. J. Geophys. Res. Atmos. 2013, 118, 2956–2965. [Google Scholar] [CrossRef]
- Chazette, P. The monsoon aerosol extinction properties at Goa during INDOEX as measured with lidar. J. Geophys. Res. 2003, 108, 4187. [Google Scholar] [CrossRef]
- Mattis, I.; Ansmann, A.; Müller, D.; Wandinger, U.; Althausen, D. Multilayer aerosol observations with dual-wavelength Raman lidar in the framework of EARLINET. J. Geophys. Res. 2004, 109, D13203. [Google Scholar] [CrossRef]
- Robinson, W.P.; Anosova, G.B. Mining and Mineral Development Management Policy in the Selenga River Watershed. In Proceedings of the Science for Watershed Conservation: Multidisciplinary Approaches for Natural Resource Management Conference; United States Geological Survey (USGS), Institute of General and Experimental Biology: Albuquerque, NM, USA; Siberian Division—Russian Academy of Sciences: Ulan-Ude, Russia; Mongolian Academy of Sciences: Ulanbaatar, Mongolia, 2004. [Google Scholar]
- Müller, D.; Ansmann, A.; Mattis, I.; Tesche, M.; Wandinger, U.; Althausen, D.; Pisani, G. Aerosol-type-dependent lidar ratios observed with Raman lidar. J. Geophys. Res. Atmos. 2007, 112, D16202. [Google Scholar] [CrossRef]
- Illingworth, A.J.; Barker, H.W.; Beljaars, A.; Ceccaldi, M.; Chepfer, H.; Clerbaux, N.; Cole, J.; Delanoë, J.; Domenech, C.; Donovan, D.P.; et al. The EarthCARE satellite: The next step forward in global measurements of clouds, aerosols, precipitation, and radiation. Bull. Am. Meteorol. Soc. 2015, 96, 1311–1332. [Google Scholar] [CrossRef]
- Baars, H.; Kanitz, T.; Engelmann, R.; Althausen, D.; Heese, B.; Komppula, M.; Preißler, J.; Tesche, M.; Ansmann, A.; Wandinger, U.; et al. An overview of the first decade of PollyNET: An emerging network of automated Raman-polarization lidars for continuous aerosol profiling. Atmos. Chem. Phys. 2016, 16, 5111–5137. [Google Scholar] [CrossRef] [Green Version]
- Groß, S.; Esselborn, M.; Weinzierl, B.; Wirth, M.; Fix, A.; Petzold, A. Aerosol classification by airborne high spectral resolution lidar observations. Atmos. Chem. Phys. 2013, 13, 2487–2505. [Google Scholar] [CrossRef] [Green Version]
- Cattrall, C.; Reagan, J.; Thome, K.; Dubovik, O. Variability of aerosol and spectral lidar and backscatter and extinction ratios of key aerosol types derived from selected Aerosol Robotic Network locations. J. Geophys. Res. 2005, 110, 1–13. [Google Scholar] [CrossRef]
- Preißler, J.; Wagner, F.; Guerrero-Rascado, J.L.; Silva, A.M. Two years of free-tropospheric aerosol layers observed over Portugal by lidar. J. Geophys. Res. Atmos. 2013, 118, 3676–3686. [Google Scholar] [CrossRef]
- Franke, K.; Ansmann, A.; Müller, D.; Althausen, D.; Wagner, F.; Scheele, R. One-year observations of particle lidar ratio over the tropical Indian Ocean with Raman lidar. Geophys. Res. Lett. 2001, 28, 4559–4562. [Google Scholar] [CrossRef]
- Franke, K.; Ansmann, A.; Ller, D.M.; Althausen, D.; Venkataraman, C.; Reddy, M.S.; Wagner, F.; Scheele, R. Optical properties of the Indo-Asian haze layer over the tropical Indian Ocean. J. Geophys. Res. 2003, 108, 1–17. [Google Scholar] [CrossRef]
- Huang, K.; Fu, J.S.; Prikhodko, V.Y.; Storey, J.M.; Romanov, A.; Hodson, E.L.; Cresko, J.; Morozova, I.; Ignatieva, Y.; Cabaniss, J. Russian anthropogenic black carbon: Emission reconstruction and Arctic black carbon simulation. J. Geophys. Res. Atmos. 2015, 120, 11306–11333. [Google Scholar] [CrossRef]
- Gibert, F.; Cuesta, J.; Yano, J.I.; Arnault, N.; Flamant, P.H. On the correlation between convective plume updrafts and downdrafts, lidar reflectivity and depolarization ratio. Bound.-Layer Meteorol. 2007, 125, 553–573. [Google Scholar] [CrossRef]
- Toledano, C.; Cachorro, V.E.; de Frutos, A.M.; Sorribas, M.; Prats, N.; de la Morena, B.A. Inventory of African desert dust events over the southwestern Iberian Peninsula in 2000–2005 with an AERONET Cimel Sun photometer. J. Geophys. Res. 2007, 112, D21201. [Google Scholar] [CrossRef]
- Duchi, R.; Cristofanelli, P.; Landi, T.C.; Arduini, J.; Bonafe, U.; Bourcier, L.; Busetto, M.; Calzolari, F.; Marinoni, A.; Putero, D.; et al. Long-term (2002–2012) investigation of Saharan dust transport events at Mt. Cimone GAW global station, Italy (2165 m a.s.l.). Elem. Sci. Anth 2016, 4, 85. [Google Scholar] [CrossRef]
- Konovalov, I.B.; Beekmann, M.; Kuznetsova, I.N.; Yurova, A.; Zvyagintsev, A.M. Atmospheric impacts of the 2010 Russian wildfires: Integrating modelling and measurements of an extreme air pollution episode in the Moscow region. Atmos. Chem. Phys. 2011, 11, 10031–10056. [Google Scholar] [CrossRef]
- Groß, S.; Tesche, M.; Freudenthaler, V.; Toledano, C.; Wiegner, M.; Ansmann, A.; Althausen, D.; Seefeldner, M. Characterization of Saharan dust, marine aerosols and mixtures of biomass-burning aerosols and dust by means of multi-wavelength depolarization and Raman lidar measurements during SAMUM 2. Tellus B 2011, 63, 706–724. [Google Scholar] [CrossRef]
- Murayama, T.; Müller, D.; Wada, K.; Shimizu, A.; Sekiguchi, M.; Tsukamoto, T. Characterization of Asian dust and Siberian smoke with multi-wavelength Raman lidar over Tokyo, Japan in spring 2003. Geophys. Res. Lett. 2004, 31, 1–5. [Google Scholar] [CrossRef]
- Haarig, M.; Ansmann, A.; Althausen, D.; Klepel, A.; Groß, S.; Freudenthaler, V.; Toledano, C.; Mamouri, R.-E.; Farrell, D.A.; Prescod, D.A.; et al. Triple-wavelength depolarization-ratio profiling of Saharan dust over Barbados during SALTRACE in 2013 and 2014. Atmos. Chem. Phys. Discuss. 2017, 17, 1–43. [Google Scholar] [CrossRef]
- Stein, A.F.; Draxler, R.R.; Rolph, G.D.; Stunder, B.J.B.; Cohen, M.D.; Ngan, F. NOAA’s HYSPLIT Atmospheric Transport and Dispersion Modeling System. Bull. Am. Meteorol. Soc. 2015, 96, 2059–2077. [Google Scholar] [CrossRef]
- Rolph, G.; Stein, A.; Stunder, B. Real-time Environmental Applications and Display sYstem: READY. Environ. Model. Softw. 2017, 95, 210–228. [Google Scholar] [CrossRef]










| City Name | Country | Latitude (°N) | Longitude (°E) | Population (Thousands) | Specific Industrial Activities Likely Involved in Particulate Air Pollution |
|---|---|---|---|---|---|
| Paris | France | 48.9 | 2.3 | 10,688 | – |
| Berlin | Germany | 52.5 | 13.4 | 3529 | Metal-working, agri-food |
| Riga | Latvia | 56.9 | 24.1 | 638 | Wood products, electronics, agri-food |
| Pskov | Russia (West) | 57.8 | 27.3 | 203 | Electronics, motor vehicle equipment, agri-food |
| Yartsevo | 55.1 | 32.7 | 47 | Foundry | |
| Moscow | 55.8 | 37.6 | 11,909 | Coal power plants, mechanical engineering, metal-working, agri-food, chemistry | |
| Ufa | Russia (Center) | 54.7 | 56.0 | 1069 | Oil extraction and refining, petrochemistry |
| Chelyabinsk | 55.2 | 61.4 | 1148 | Metallurgy and metal-working (steelworks, zinc and chrome smelting, etc.), open-air mining | |
| Omsk | Russia (Siberia) | 55.0 | 73.4 | 1161 | Oil extraction and refining, petrochemistry, coal power plants |
| Irkutsk and Angara Valley | 52.3 | 104.3 | 586 | Several coal power plants, oil refining, chemistry and petrochemistry, aluminum smelting, metal-working, open-air mining (coal and salt), paper mill, etc. | |
| Ulan-Ude | 51.8 | 107.6 | 421 | Coal power plant, several abandoned open-air mines (coal, tungsten, molybdenum) |
| City (Layer) | Date in 2013 | Obs. Duration | Inversion Method | LR (sr) at 355 nm | PDR (%) at 355 nm |
|---|---|---|---|---|---|
| Paris (morning BL) | 4 June | 1 h | Single-layer Raman CKI | 83 ± 6 | 0.6 ± 0.7 |
| Berlin (midday BL) | 6 June | 75 min (30 min) | Lidar/MODIS synergy | 68 ± 21 | 2.3 ± 1.2 |
| Riga (lower/upper sublayers in residual layer) | 9–10 June | ~3 h | Standard Raman inversion | 96 ± 16 | 3.4 ± 1.3 |
| (low-pass derivative filter) | 74 ± 8 | 1.5 ± 0.8 | |||
| Pskov (residual layer) | 14–15 June | 70 min | Standard Raman inversion | 83 ± 7 | 1.1 ± 0.6 |
| Yartsevo (residual layer) | 15–16 June | 2.5 h | Multi-layer Raman CKI | 87 ± 7 | 0.9 ± 0.6 |
| Moscow (residual layer) | 17 June | 90 min | Multi-layer Raman CKI | 82 ± 13 | 2.3 ± 1.0 |
| Ufa (residual layer) | 19–20 June | 3.3 h | Standard Raman inversion | 96 ± 7 | 4.7 ± 1.4 |
| (pollution plume) | 55 min | Single-layer Raman CKI | 96 ± 9 | 20 ± 7 | |
| Chelyabinsk (residual layer) | 20–21 June | 2.5 h | Standard Raman inversion | 85 ± 8 | 3.5 ± 1.1 |
| Omsk (residual layer, after sunset) | 22–23 June | 2.5 h | Standard Raman inversion | 67 ± 13 | 4 ± 2 |
| (residual layer, middle of night) | Standard Raman inversion | 92 ± 19 | 3 ± 2 | ||
| Irkutsk (afternoon BL) | 28 June | 4 h | Single-layer Raman CKI | 50 ± 4 | 3.2 ± 1.2 |
| (nocturnal BL) | 4 h | Multi-layer Raman CKI | 80 ± 6 | 3.8 ± 1.1 | |
| (night, pollution plume) | 4 h | Multi-layer Raman CKI | 38 ± 2 | 5.0 ± 1.6 | |
| Ulan-Ude (lower/upper sublayers in residual layer) | 1–2 July | 6 h | Standard Raman inversion | 48 ± 9 | 1.9 ± 0.8 |
| 71 ± 8 | 1.3 ± 0.7 |
| Site, Campaign or Network | LR Retrieval Method | λ (nm) | LR (sr) | PDR (%) | Reference |
|---|---|---|---|---|---|
| Worldwide stations, AERONET | Sun-photometers | 550 | 71 ± 10 | – | Cattral et al. [66] |
| North America and Caribbean, | High spectral resolution lidar | 532 | 52–69 | 3–8 | Burton et al. [57] |
| multi-campaign | (42–80) | (2–11) | |||
| Northwestern Europe, EUCAARI | High spectral resolution lidar | 532 | 56 ± 6 | 6 ± 1 | Groß et al. [65] |
| (33–72) | (3–11) | ||||
| Leipzig, EARLINET | N2 Raman lidar | 355 | 58 ± 12 | – | Mattis et al. [60] |
| Central European pollution | 532 | – | <5 | Müller et al. [62] | |
| Leipzig, PollyNET/EARLINET | N2 Raman lidar | 355 | 45–65 | 0–7 | Baars et al. [64] |
| European pollution | 57 ± 4 | 3 ± 1 | Illingworth et al. [63] | ||
| Paris, ESQUIF | Lidar/sun-photometer synergy | 532 | 59–77 | – | Chazette et al. [17] |
| Paris, LISAIR | N2 Raman lidar | 355 | 83 ± 22 | – | Raut and Chazette [18] |
| Paris | N2 Raman lidar | 355 | 85 ± 18 | – | Royer et al. [48] |
| Po Valley | CALIOP/MODIS synergy | 532 | 83 ± 25 | – | Royer et al. [53] |
| Southern Portugal, EARLINET | N2 Raman lidar | 355 | – | Preßler et al. [67] | |
| - European pollution | 64 ± 23 | ||||
| - North American pollution | 46 ± 23 | ||||
| INODEX: | |||||
| - Northern India | N2 Raman lidar | 532 | 65 ± 16 | – | Franke et al. [68,69] |
| - Southern India | 37 ± 10 | ||||
| - Southeast Asia | 51 ± 20 | ||||
| Pearl River delta (southern China) | N2 Raman lidar | 532 | 47 ± 6 | – | Ansmann et al. [21] |
| Pearl River Delta (southern China) | N2 Raman lidar | 355 | 51 ± 10 | – | Heese et al. [23] |
| 532 | 48 ± 11 | 3.6 ± 3.7 | |||
| Beijing (northern China) | N2 Raman lidar | 532 | 38 ± 7 | – | Tesche et al. [22] |
| NE China: | |||||
| - pure pollution | N2 Raman lidar | 532 | ~60 | – | Hänel et al. [25] |
| - pollution/desert dust | 40–90 | ||||
| City | Date in 2013 | Lower Layer | Upper Layer (If Existing) | ||
|---|---|---|---|---|---|
| Aerosol Typing | LR (sr) | Aerosol Typing | LR (sr) | ||
| Riga | 6 May | Polluted dust | 55 ± 22 | – | – |
| 15 May | Polluted continental or smoke | 70 ± 25 | – | – | |
| Pskov | 1 June | Dust | 40 ± 20 | Polluted dust | 55 ± 22 |
| 3 July | Polluted continental or smoke | 70 ± 25 | Polluted dust | 55 ± 22 | |
| Yartsevo | 4 June | Elevated smoke | 70 ± 28 | – | – |
| 21 June | Polluted dust | 55 ± 22 | – | – | |
| 29 June | Polluted continental or smoke | 70 ± 25 | Polluted dust | 55 ± 22 | |
| 6 July | Polluted dust | 55 ± 22 | – | – | |
| Moscow | 11 August | Polluted dust | 55 ± 22 | – | – |
| Ufa | 6 July | Polluted dust | 55 ± 22 | Elevated smoke | 70 ± 28 |
| Chelyabinsk | 14 May | Polluted dust | 55 ± 22 | Dust | 40 ± 20 |
| 30 May | Dust | 40 ± 20 | – | – | |
| 22 June | Polluted dust | 55 ± 22 | – | – | |
| 24 July | Polluted dust | 55 ± 22 | Elevated smoke | 70 ± 28 | |
| Omsk | 13 May | Polluted dust | 55 ± 22 | – | – |
| 29 May | Polluted dust | 55 ± 22 | – | – | |
| Irkutsk | 1 May | Polluted continental or smoke | 70 ± 25 | – | – |
| 20 July | Polluted continental or smoke | 70 ± 25 | – | – | |
| 29 July | Polluted continental or smoke | 70 ± 25 | Polluted dust | 55 ± 22 | |
| Ulan-Ude | 12 May | Polluted continental or smoke | 70 ± 25 | Polluted dust | 55 ± 22 |
| 20 June | Polluted dust | 55 ± 22 | – | – | |
| 31 July | Elevated smoke | 70 ± 28 | – | – | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dieudonné, E.; Chazette, P.; Marnas, F.; Totems, J.; Shang, X. Raman Lidar Observations of Aerosol Optical Properties in 11 Cities from France to Siberia. Remote Sens. 2017, 9, 978. https://doi.org/10.3390/rs9100978
Dieudonné E, Chazette P, Marnas F, Totems J, Shang X. Raman Lidar Observations of Aerosol Optical Properties in 11 Cities from France to Siberia. Remote Sensing. 2017; 9(10):978. https://doi.org/10.3390/rs9100978
Chicago/Turabian StyleDieudonné, Elsa, Patrick Chazette, Fabien Marnas, Julien Totems, and Xiaoxia Shang. 2017. "Raman Lidar Observations of Aerosol Optical Properties in 11 Cities from France to Siberia" Remote Sensing 9, no. 10: 978. https://doi.org/10.3390/rs9100978
APA StyleDieudonné, E., Chazette, P., Marnas, F., Totems, J., & Shang, X. (2017). Raman Lidar Observations of Aerosol Optical Properties in 11 Cities from France to Siberia. Remote Sensing, 9(10), 978. https://doi.org/10.3390/rs9100978