Assessment of Errors Caused by Forest Vegetation Structure in Airborne LiDAR-Derived DTMs


Abstract
:1. Introduction
- Using a network of ground control points (from a GNSS and TS) to produce a reference DTM to assess the accuracy of ALS-derived DTMs.
- Compare the accuracy of DTMs from ALS surveys in both leaf-on and leaf-off conditions.
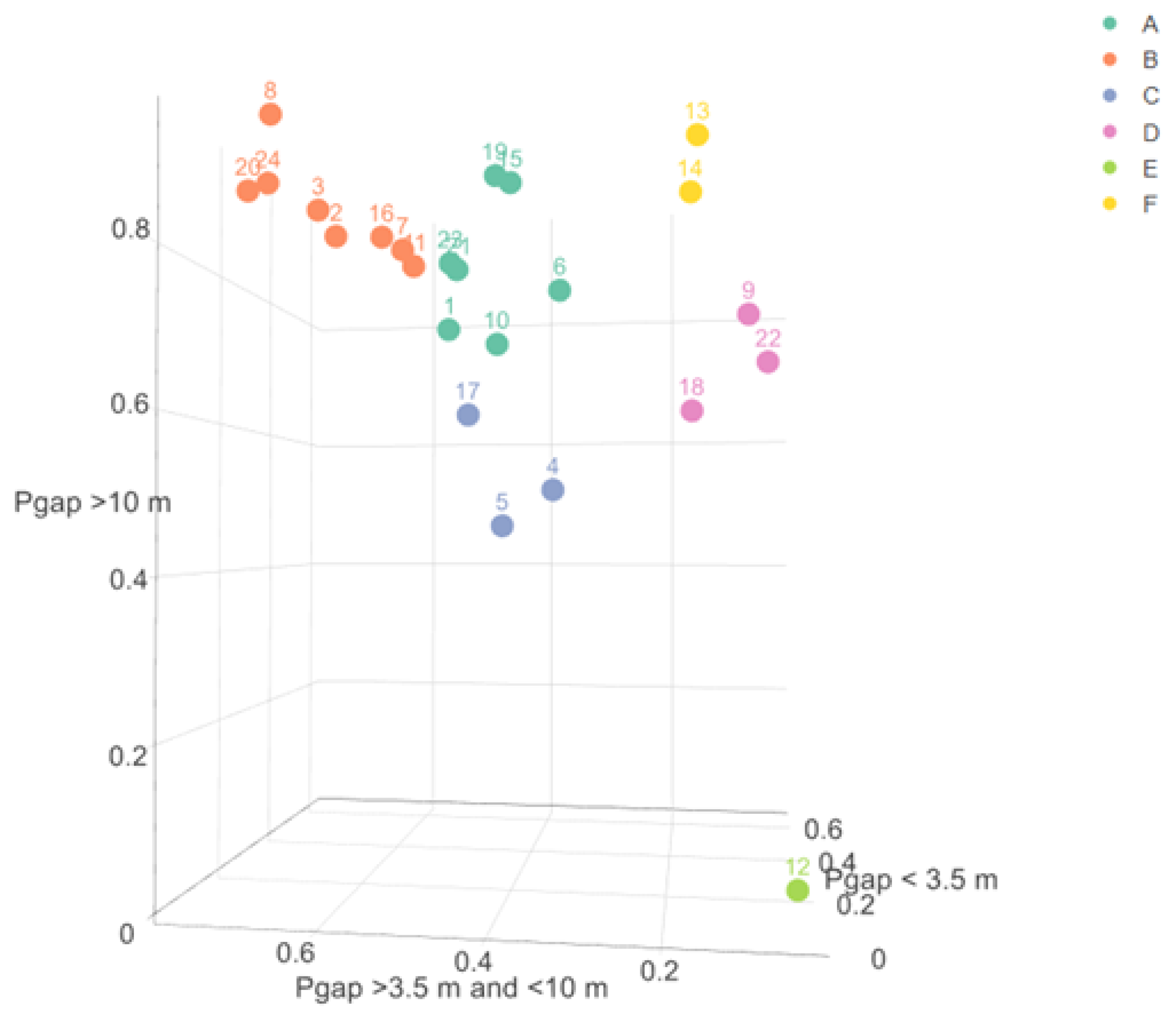
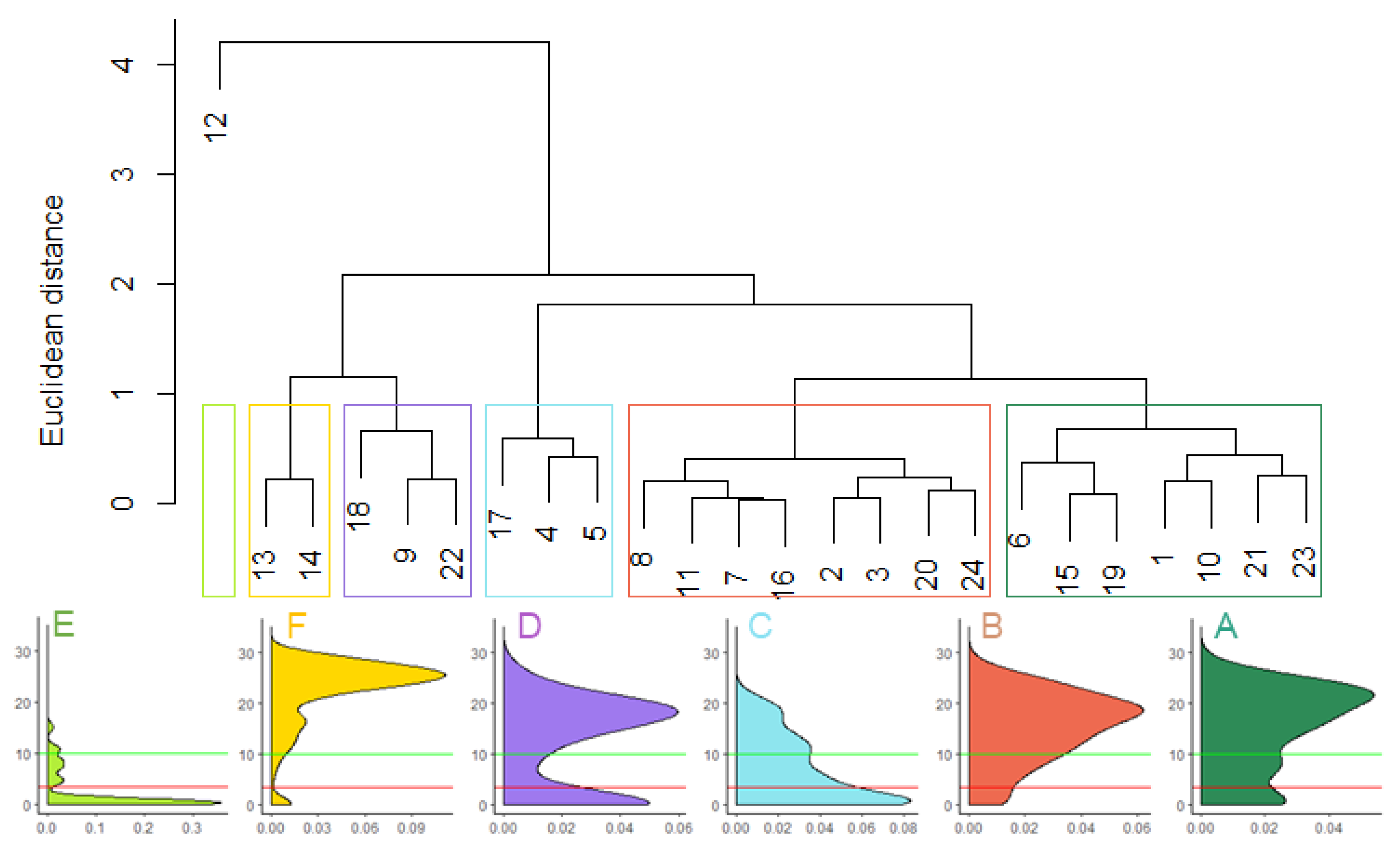
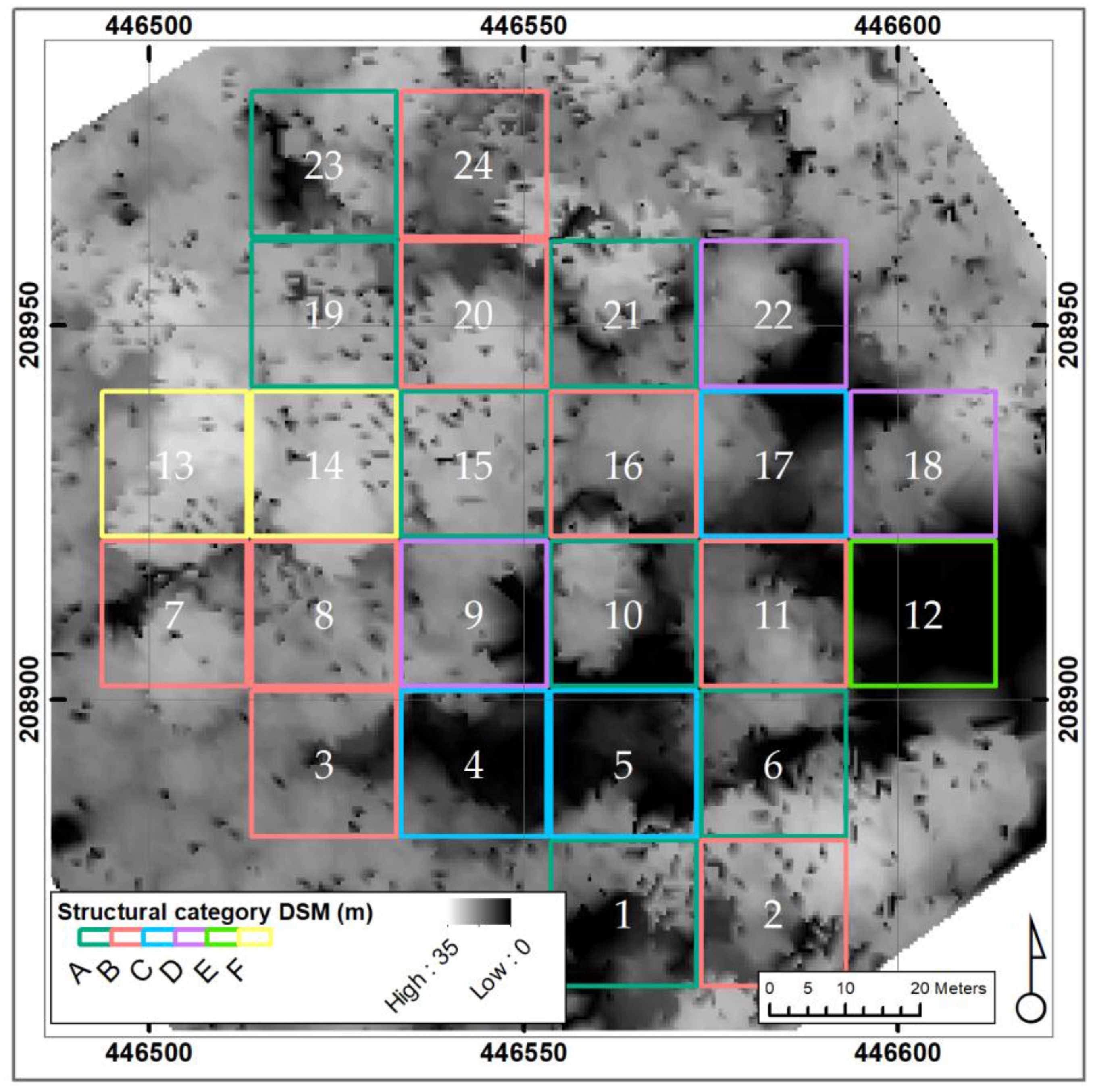
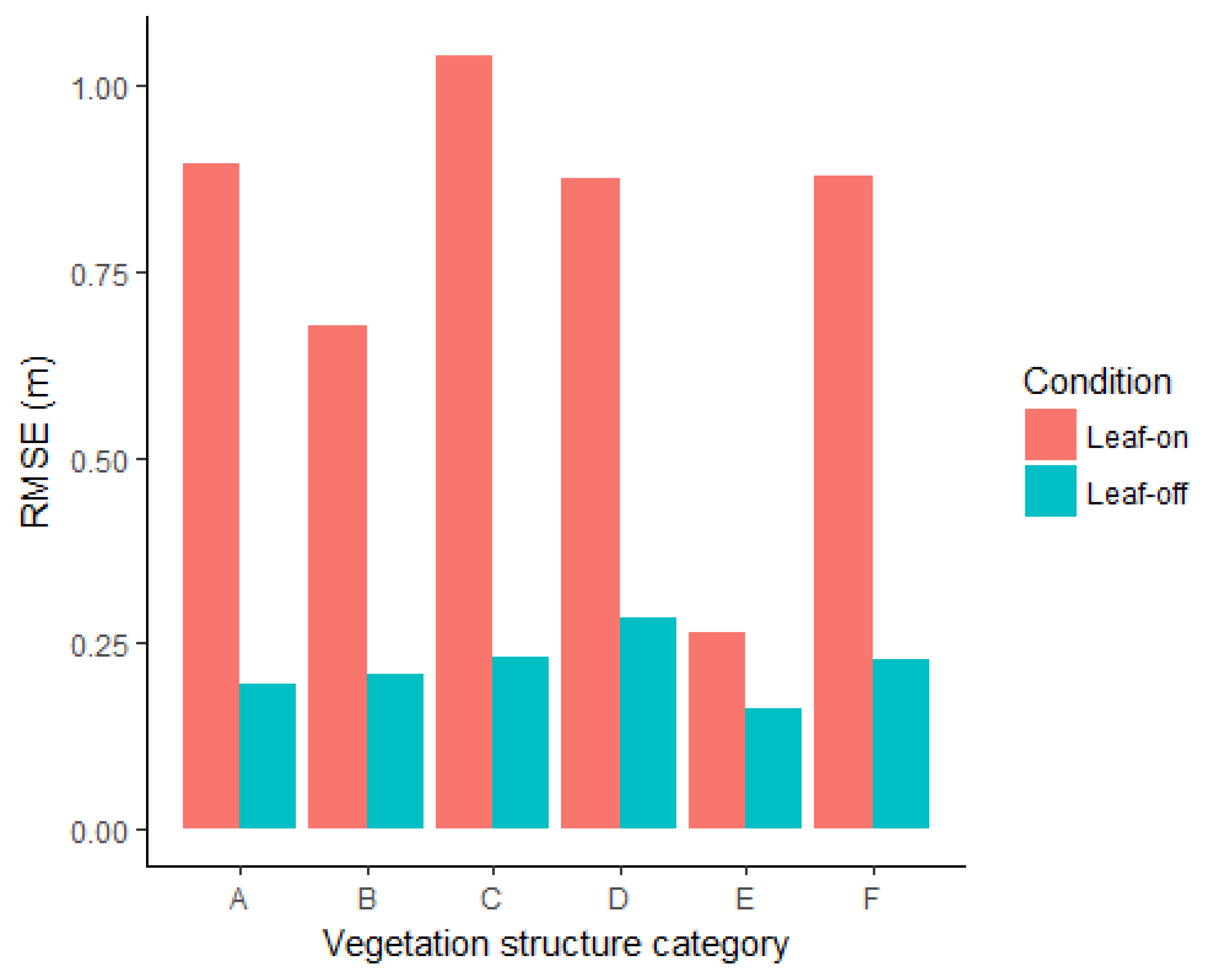
- Quantitatively classify the different vertical vegetation structure categories in the forest plot, and compare DTM accuracy in each category.
- Compare DTM accuracy with vegetation density at different vertical strata, independently of vertical vegetation structure categories.
2. Site Description, Materials and Methods
3. Results
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wilkes, P.; Jones, S.D.; Suarez, L.; Haywood, A.; Mellor, A.; Woodgate, W.; Soto-Berelov, M.; Skidmore, A.K. Using discrete-return airborne laser scanning to quantify number of canopy strata across diverse forest types. Methods Ecol. Evol. 2016, 7, 700–712. [Google Scholar] [CrossRef]
- Koch, B.; Heyder, U.; Weinacker, H. Detection of individual tree crowns in airborne LIDAR data. Photogramm. Eng. Remote Sens. 2006, 72. [Google Scholar] [CrossRef]
- Rahman, M.Z.A.; Gorte, B. Individual Tree Detection Based on Densities of High Points of High Resolution Airborne LIDAR. Available online: http://www.isprs.org/proceedings/xxxviii/4-c1/sessions/Session12/6790_Rahman_Proc.pdf (accessed on 26 October 2017).
- Clark, M.L.; Clark, D.B.; Roberts, D.A. Small-footprint lidar estimation of sub-canopy elevation and tree height in a tropical rain forest landscape. Remote Sens. Environ. 2004, 91, 68–89. [Google Scholar] [CrossRef]
- Estornell, J.; Ruiz, L.A.; Velázquez-Martí, B.; Hermosilla, T. Analysis of the factors affecting LiDAR DTM accuracy in a steep shrub area. Int. J. Digit. Earth 2011, 4, 521–538. [Google Scholar] [CrossRef]
- Bao, Y.; Cao, C.; Zhang, H.; Chen, E.; He, Q.; Huang, H.; Li, Z.; Li, X.; Gong, P. Synchronous estimation of DTM and fractional vegetation cover in forested area from airborne LIDAR height and intensity data. Sci. China Ser. E 2008, 51, 176–187. [Google Scholar] [CrossRef]
- Hyyppä, H.; Yu, X.; Hyyppä, J.; Kaartinen, H.; Kaasalainen, S.; Honkavaara, E.; Rönnholm, P. Factors affecting the quality of DTM generation in forested areas. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2005, 36, 85–90. [Google Scholar]
- Reutebuch, S.E.; McGaughey, R.J.; Andersen, H.-E.; Carson, W.W. Accuracy of a high-resolution lidar terrain model under a conifer forest canopy. Can. J. Remote Sens. 2003, 29, 527–535. [Google Scholar] [CrossRef]
- Su, J.; Bork, E. Influence of vegetation, slope, and lidar sampling angle on DEM accuracy. Photogramm. Eng. Remote Sens. 2006, 72, 1265–1274. [Google Scholar] [CrossRef]
- Tinkham, W.T.; Smith, A.M.S.; Hoffman, C.; Hudak, A.T.; Falkowski, M.J.; Swanson, M.E.; Gessler, P.E. Investigating the influence of LiDAR ground surface errors on the utility of derived forest inventories. Can. J. For. Res. 2012, 42, 413–422. [Google Scholar] [CrossRef]
- Hodgson, M.E.; Jensen, J.R.; Schmidt, L.; Schill, S.; Davis, B. An evaluation of LIDAR- and IFSAR-derived digital elevation models in leaf-on conditions with USGS Level 1 and Level 2 DEMs. Remote Sens. Environ. 2003, 84, 295–308. [Google Scholar] [CrossRef]
- Wasser, L.; Day, R.; Chasmer, L.; Taylor, A. Influence of Vegetation Structure on Lidar-derived Canopy Height and Fractional Cover in Forested Riparian Buffers During Leaf-Off and Leaf-On Conditions. PLoS ONE 2013, 8, e54776. [Google Scholar] [CrossRef] [PubMed]
- Hansen, E.H.; Gobakken, T.; Næsset, E. Effects of Pulse Density on Digital Terrain Models and Canopy Metrics Using Airborne Laser Scanning in a Tropical Rainforest. Remote Sens. 2015, 7, 8453–8468. [Google Scholar] [CrossRef] [Green Version]
- Jubanski, J.; Ballhorn, U.; Kronseder, K.; Franke, J.; Siegert, F. Detection of large above-ground biomass variability in lowland forest ecosystems by airborne LiDAR. Biogeosciences 2013, 10, 3917–3930. [Google Scholar] [CrossRef]
- Salleh, M.R.M.; Ismail, Z.; Rahman, M.Z.A. Accuracy assessment of lidar-derived digital terrain model (dtm) with different slope and canopy cover in tropical forest region. Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, II-2/W2, 183–189. [Google Scholar] [CrossRef]
- Englhart, S.; Franke, J.; Keuck, V.; Siegert, F. Aboveground biomass estimation of tropical peat swamp forests using SAR and optical data. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; pp. 6577–6580. [Google Scholar]
- Konecny, K.; Ballhorn, U.; Navratil, P.; Jubanski, J.; Page, S.E.; Tansey, K.; Hooijer, A.; Vernimmen, R.; Siegert, F. Variable carbon losses from recurrent fires in drained tropical peatlands. Glob. Chang. Biol. 2016, 22, 1469–1480. [Google Scholar] [CrossRef] [PubMed]
- Ren, H.C.; Yan, Q.; Liu, Z.J.; Zuo, Z.Q.; Xu, Q.Q.; Li, F.F.; Song, C. Study on analysis from sources of error for Airborne LIDAR. IOP Conf. Ser. Earth Environ. Sci. 2016, 46, 12030. [Google Scholar] [CrossRef]
- Lovell, J.L.; Jupp, D.L.B.; Culvenor, D.S.; Coops, N.C. Using airborne and ground-based ranging lidar to measure canopy structure in Australian forests. Can. J. Remote Sens. 2003, 29, 607–622. [Google Scholar] [CrossRef]
- Ballhorn, U.; Siegert, F.; Mason, M.; Limin, S. Derivation of burn scar depths and estimation of carbon emissions with LiDAR in Indonesian peatlands. Proc. Natl. Acad. Sci. USA 2009, 106, 21213–21218. [Google Scholar] [CrossRef] [PubMed]
- Fowler, A.; Kadatskiy, V. Accuracy and error assessment of terrestrial, mobile and airborne LIDAR. In Proceedings of the American Society of Photogrammetry and Remote Sensing Conference (ASPRP 2011), Milwaukee, WI, SUA, 1–5 May 2011. [Google Scholar]
- Razak, K.A.; Santangelo, M.; Van Westen, C.J.; Straatsma, M.W.; de Jong, S.M. Generating an optimal DTM from airborne laser scanning data for landslide mapping in a tropical forest environment. Geomorphology 2013, 190, 112–125. [Google Scholar] [CrossRef]
- Reddy, A.D.; Hawbaker, T.J.; Wurster, F.; Zhu, Z.; Ward, S.; Newcomb, D.; Murray, R. Quantifying soil carbon loss and uncertainty from a peatland wildfire using multi-temporal LiDAR. Remote Sens. Environ. 2015, 170, 306–316. [Google Scholar] [CrossRef]
- Wang, Y. Trends in atmospheric haze induced by peat fires in Sumatra Island, Indonesia and El Niño phenomenon from 1973 to 2003. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef]
- Davenport, I.J.; Bradbury, R.B.; Anderson, G.Q.A.; Hayman, G.R.F.; Krebs, J.R.; Mason, D.C.; Wilson, J.D.; Veck, N.J. Improving bird population models using airborne remote sensing. Int. J. Remote Sens. 2000, 21, 2705–2717. [Google Scholar] [CrossRef]
- Onaindia, M.; Dominguez, I.; Albizu, I.; Garbisu, C.; Amezaga, I. Vegetation diversity and vertical structure as indicators of forest disturbance. For. Ecol. Manag. 2004, 195, 341–354. [Google Scholar] [CrossRef]
- Næsset, E.; Gjevestad, J.G. Performance of GPS precise point positioning under conifer forest canopies. Photogramm. Eng. Remote Sens. 2008, 74, 661–668. [Google Scholar] [CrossRef]
- Simpson, J.E.; Wooster, M.J.; Smith, T.E.L.; Trivedi, M.; Vernimmen, R.R.E.; Dedi, R.; Shakti, M.; Dinata, Y. Tropical Peatland Burn Depth and Combustion Heterogeneity Assessed Using UAV Photogrammetry and Airborne LiDAR. Remote Sens. 2016, 8, 1000. [Google Scholar] [CrossRef]
- Jaskierniak, D.; Lane, P.N.J.; Robinson, A.; Lucieer, A. Extracting LiDAR indices to characterise multilayered forest structure using mixture distribution functions. Remote Sens. Environ. 2011, 115, 573–585. [Google Scholar] [CrossRef]
- Wilkes, P.; Jones, S.D.; Suarez, L.; Haywood, A.; Woodgate, W.; Soto-Berelov, M.; Mellor, A.; Skidmore, A.K. Understanding the Effects of ALS Pulse Density for Metric Retrieval across Diverse Forest Types. Photogramm. Eng. Remote Sens. 2015, 81, 625–635. [Google Scholar] [CrossRef]
- Simpson, J.E.; Slade, E.; Riutta, T.; Taylor, M.E. Factors Affecting Soil Fauna Feeding Activity in a Fragmented Lowland Temperate Deciduous Woodland. PLoS ONE 2012, 7, e29616. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jia, Y.; Lan, T.; Peng, T.; Wu, H.; Li, C.; Ni, G. Effects of point density on DEM accuracy of airborne LiDAR. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium—IGARSS, Melbourne, VIC, Australia, 21–26 July 2013; pp. 493–496. [Google Scholar]
- Bater, C.W.; Wulder, M.A.; Coops, N.C.; Nelson, R.F.; Hilker, T.; Nasset, E. Stability of Sample-Based Scanning-LiDAR-Derived Vegetation Metrics for Forest Monitoring. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2385–2392. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Z.; Peterson, J.; Chandra, S. The effect of LiDAR data density on DEM accuracy. In Proceedings of the International Congress on Modelling and Simulation (MODSIM07), Christchurch, New Zealand, 10–13 December 2007; pp. 1363–1369. [Google Scholar]
- Isenburg, M. LAStools—Efficient Tools for LiDAR Processing. Available online: https://rapidlasso.com/ (accessed on 26 October 2017).
- Axelsson, P. Processing of laser scanner data—algorithms and applications. ISPRS J. Photogramm. Remote Sens. 1999, 54, 138–147. [Google Scholar] [CrossRef]
- Kodinariya, T.M.; Makwana, P.R. Review on determining number of Cluster in K-Means Clustering. Int. J. Adv. Res. Comput. Sci. Manag. Stud. 2013, 1, 90–95. [Google Scholar]
- Leitold, V.; Keller, M.; Morton, D.C.; Cook, B.D.; Shimabukuro, Y.E. Airborne LIDAR-based estimates of tropical forest structure in complex terrain: Opportunities and trade-offs for REDD+. Carbon Balance Manag. 2015, 10. [Google Scholar] [CrossRef] [PubMed]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source | Biome | Vertical Accuracy (m) | Metric |
|---|---|---|---|
| [4] | Old growth tropical forest | 1.95 | RMSE |
| [4] | Secondary tropical forest | 1.44 | RMSE |
| [4] | Selectively logged tropical forest | 1.62 | RMSE |
| [5] | Steep Mediterranean shrubland | 0.13–0.41 | RMSE |
| [6] | Temperate conifer | 0.21 | RMSE |
| [7] | Temperate conifer | −0.05/0.12 | Mean/SD |
| [8] | Temperate conifer | 0.31/0.29 | Mean/SD |
| [9] | Temperate conifer | 0.59 | RMSE |
| [10] | Temperate conifer | 0.24 | RMSE |
| [11] | Temperate deciduous and conifer | 1.22 | RMSE |
| [11] | Temperate grass | 0.37 | RMSE |
| [12] | Temperate mixed | 0.38 | N/A |
| [11] | Temperate pine | 0.45 | RMSE |
| [11] | Temperate shrub | 1.53 | RMSE |
| [13] | Tropical forest | 1.8 | Mean |
| [14] | Tropical forest | 0.43 | RMSE |
| [15] | Tropical forest | 0.37 | RMSE |
| [4] | Tropical swamp forest | 1.64 | RMSE |
| [16] | Tropical swamp forest | 0.16 and 0.41 | RMSE |
| [17] | Tropical swamp forest | 0.12 | RMSE |
| [17] | Tropical swamp forest burn scar | 0.19 | RMSE |
| TS to GNSS | σX | σY | σZ | σXYZ |
|---|---|---|---|---|
| Mean (m) | 0.000 | 0.000 | 0.000 | 0.023 |
| Max (m) | 0.037 | 0.058 | 0.048 | 0.001 |
| RMSE (m) | 0.016 | 0.030 | 0.022 | 0.023 |
| Rotation | X | Y | Z | Translation |
|---|---|---|---|---|
| X | 1 | 0.000012 | 0.000147 | −0.06666 |
| Y | −1 × 10−5 | 1 | −0.0001 | 0.021064 |
| Z | −0.0001 | 0.000103 | 1 | 0.700736 |
| 0 | 0 | 0 | 1 |
| Structural Category | Description | Location | Mean Pgap | 1σ |
|---|---|---|---|---|
| A | Some undergrowth and mid-story, very dense canopy | Partially-closed canopy forest | 0.87 | 0.03 |
| B | Little undergrowth, dense mid-story and very dense canopy | Partially-closed canopy forest | 0.93 | 0.01 |
| C | Very dense undergrowth, dense mid-story, sparse/no canopy | Clearing edge | 0.73 | 0.01 |
| D | Dense undergrowth, sparse mid-story and dense canopy | Clearing edge, small forest gap | 0.72 | 0.07 |
| E | Some undergrowth, sparse/no mid-story and canopy | Clearing | 0.17 | NA |
| F | Sparse/no undergrowth and mid-story, very dense canopy | Closed canopy forest | 0.92 | 0.03 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Simpson, J.E.; Smith, T.E.L.; Wooster, M.J. Assessment of Errors Caused by Forest Vegetation Structure in Airborne LiDAR-Derived DTMs. Remote Sens. 2017, 9, 1101. https://doi.org/10.3390/rs9111101
Simpson JE, Smith TEL, Wooster MJ. Assessment of Errors Caused by Forest Vegetation Structure in Airborne LiDAR-Derived DTMs. Remote Sensing. 2017; 9(11):1101. https://doi.org/10.3390/rs9111101
Chicago/Turabian StyleSimpson, Jake E., Thomas E. L. Smith, and Martin J. Wooster. 2017. "Assessment of Errors Caused by Forest Vegetation Structure in Airborne LiDAR-Derived DTMs" Remote Sensing 9, no. 11: 1101. https://doi.org/10.3390/rs9111101
APA StyleSimpson, J. E., Smith, T. E. L., & Wooster, M. J. (2017). Assessment of Errors Caused by Forest Vegetation Structure in Airborne LiDAR-Derived DTMs. Remote Sensing, 9(11), 1101. https://doi.org/10.3390/rs9111101