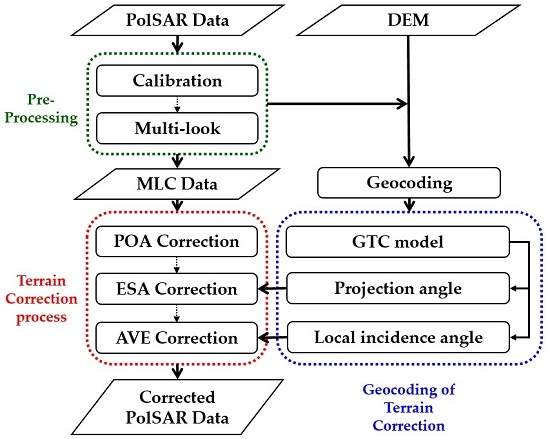
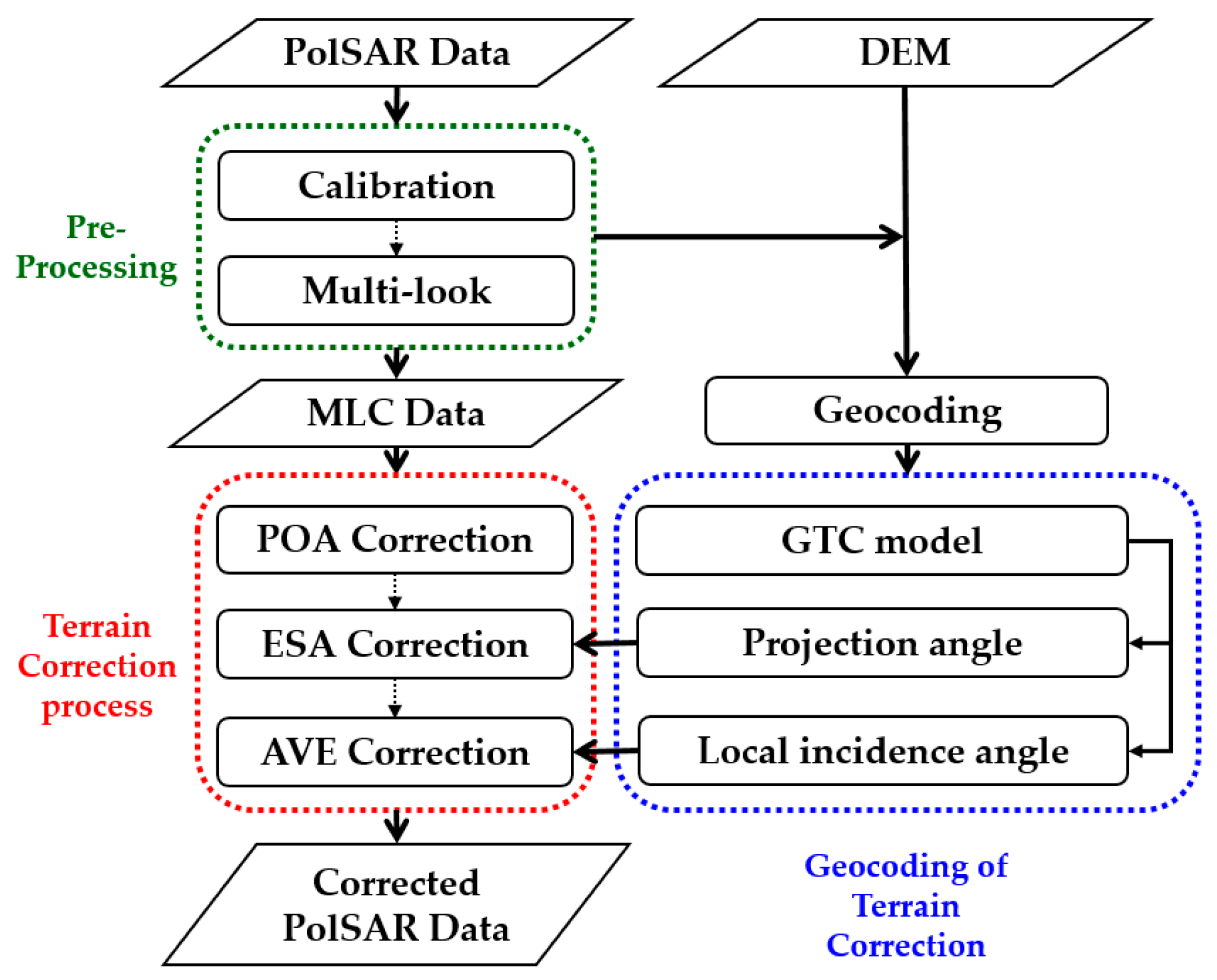
3.3.1. The Procedure of Terrain Correction
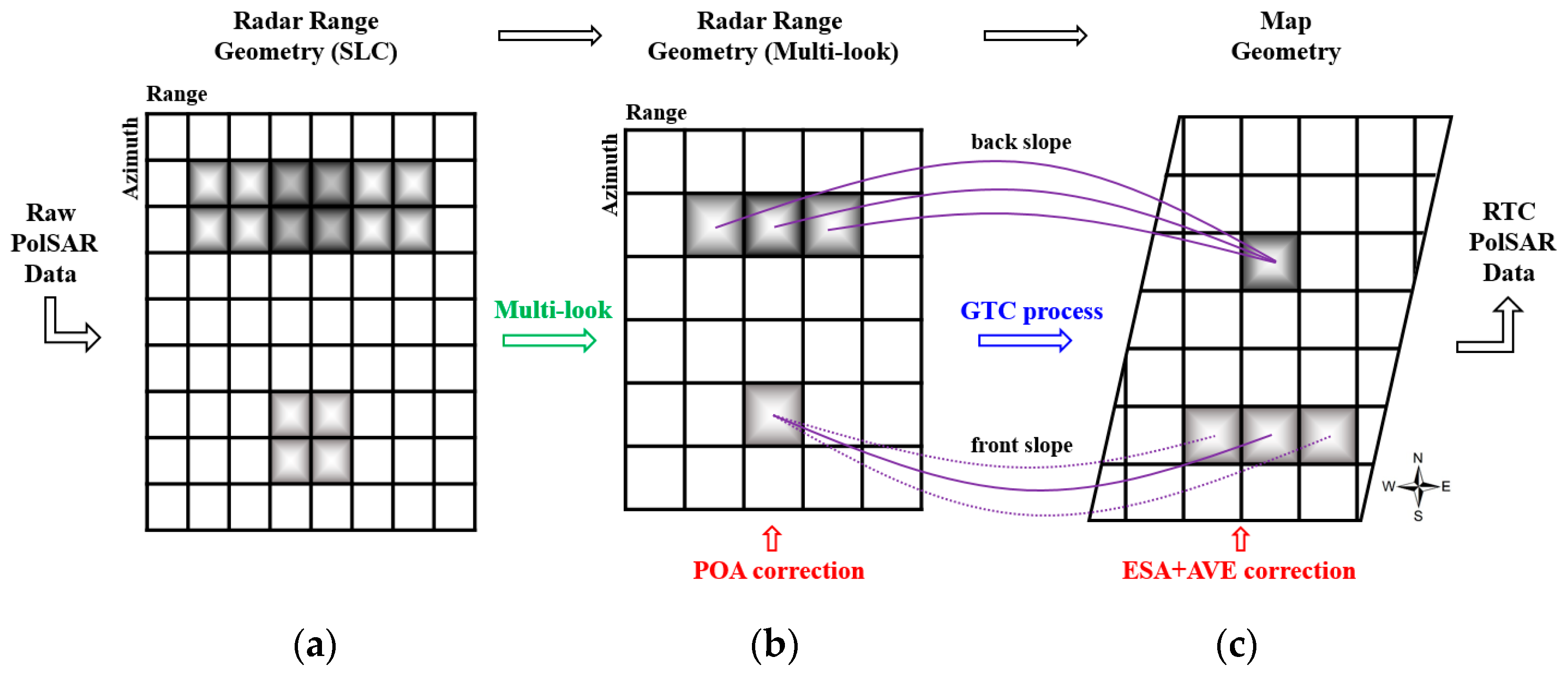
The PolSAR image terrain correction includes three steps: POA, ESA, and AVE corrections. Among these, POA correction can be completed in the slant-range space of PolSAR images before the geocoding process. The two remaining correction processes can be completed in geographic space with the GTC model. For convenient comparison, we present all of our results in geographic coordinate space.
The integrated three-step terrain correction method can be described by:
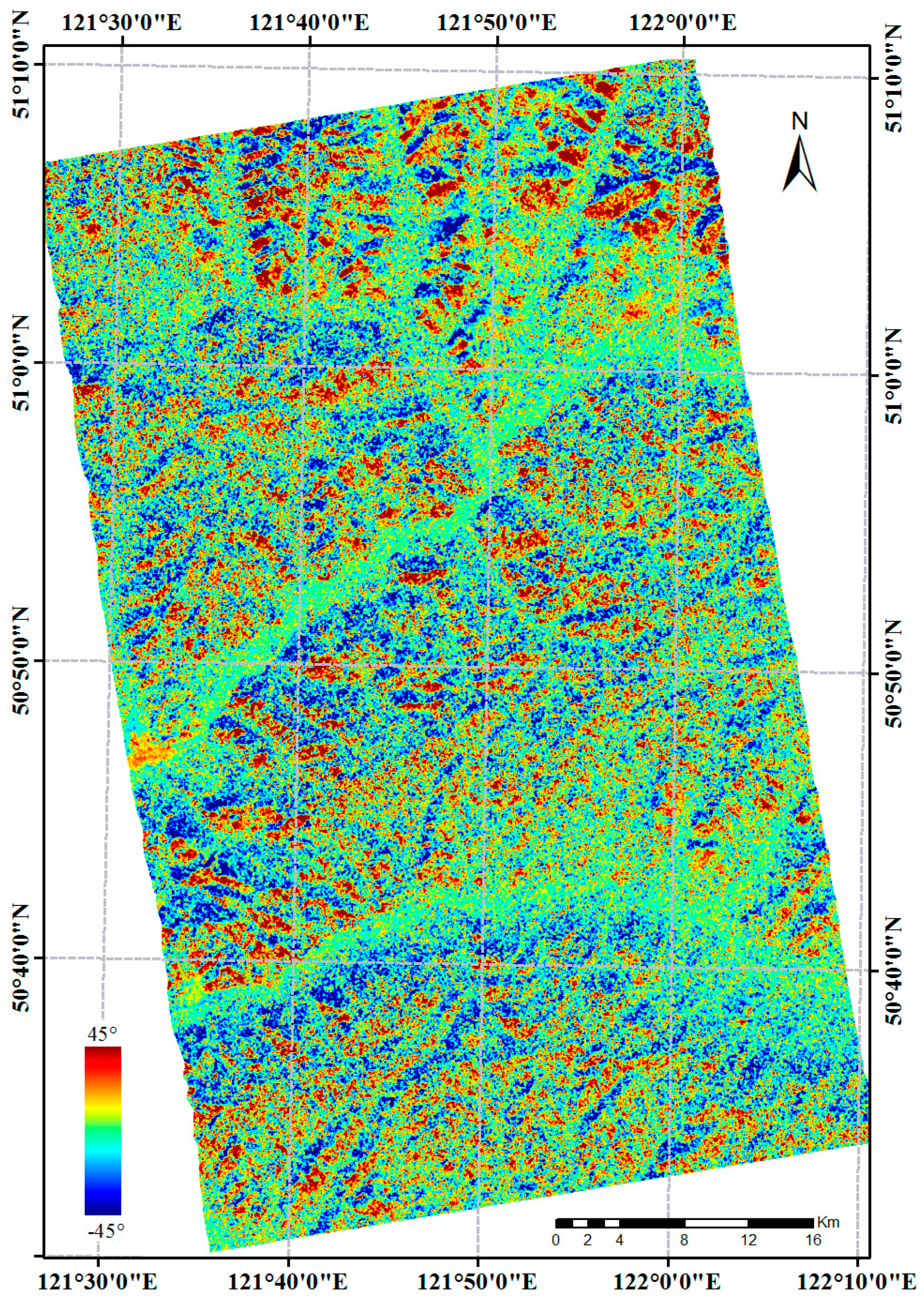
First, the POA correction is completed based on the POA shift angle (
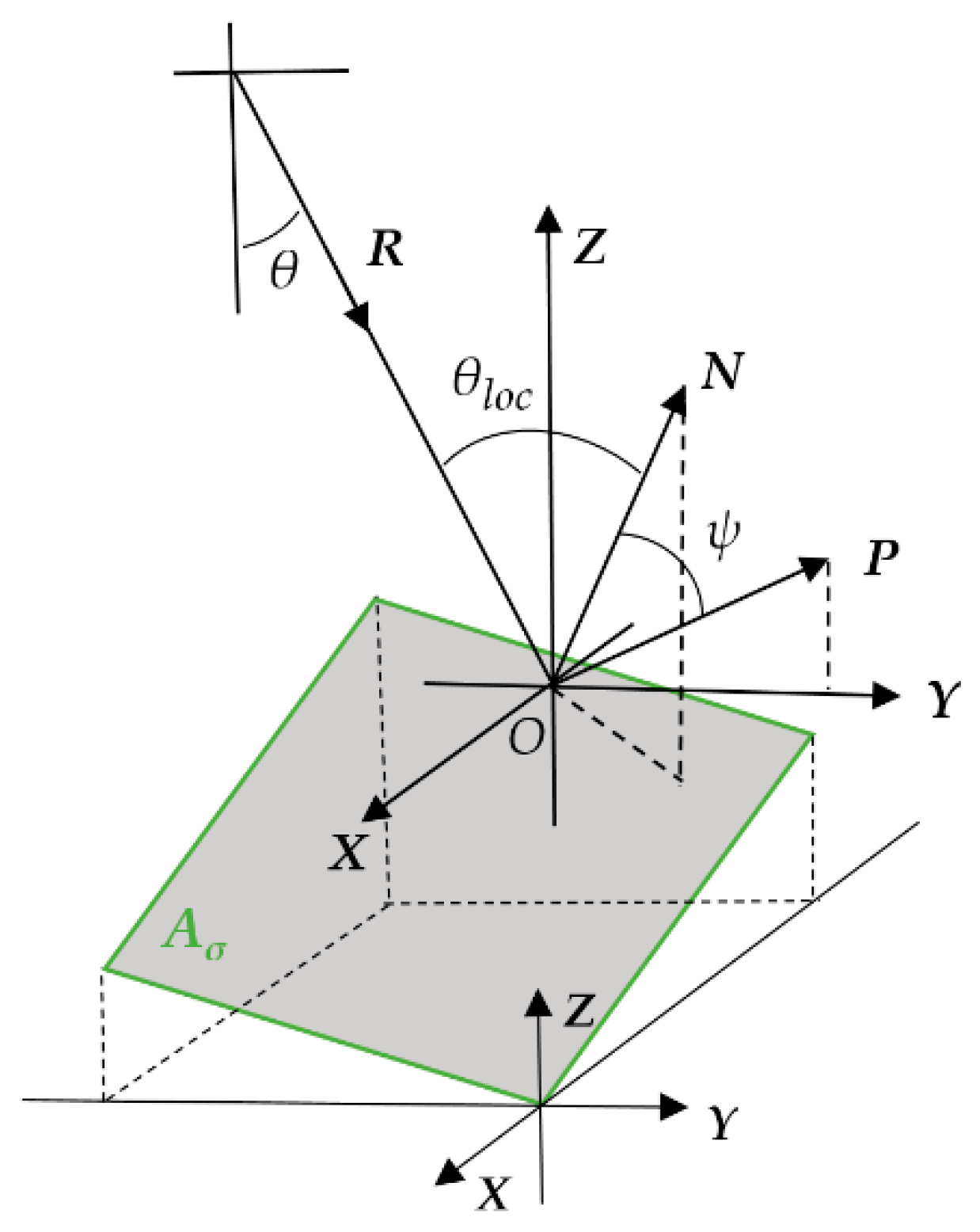
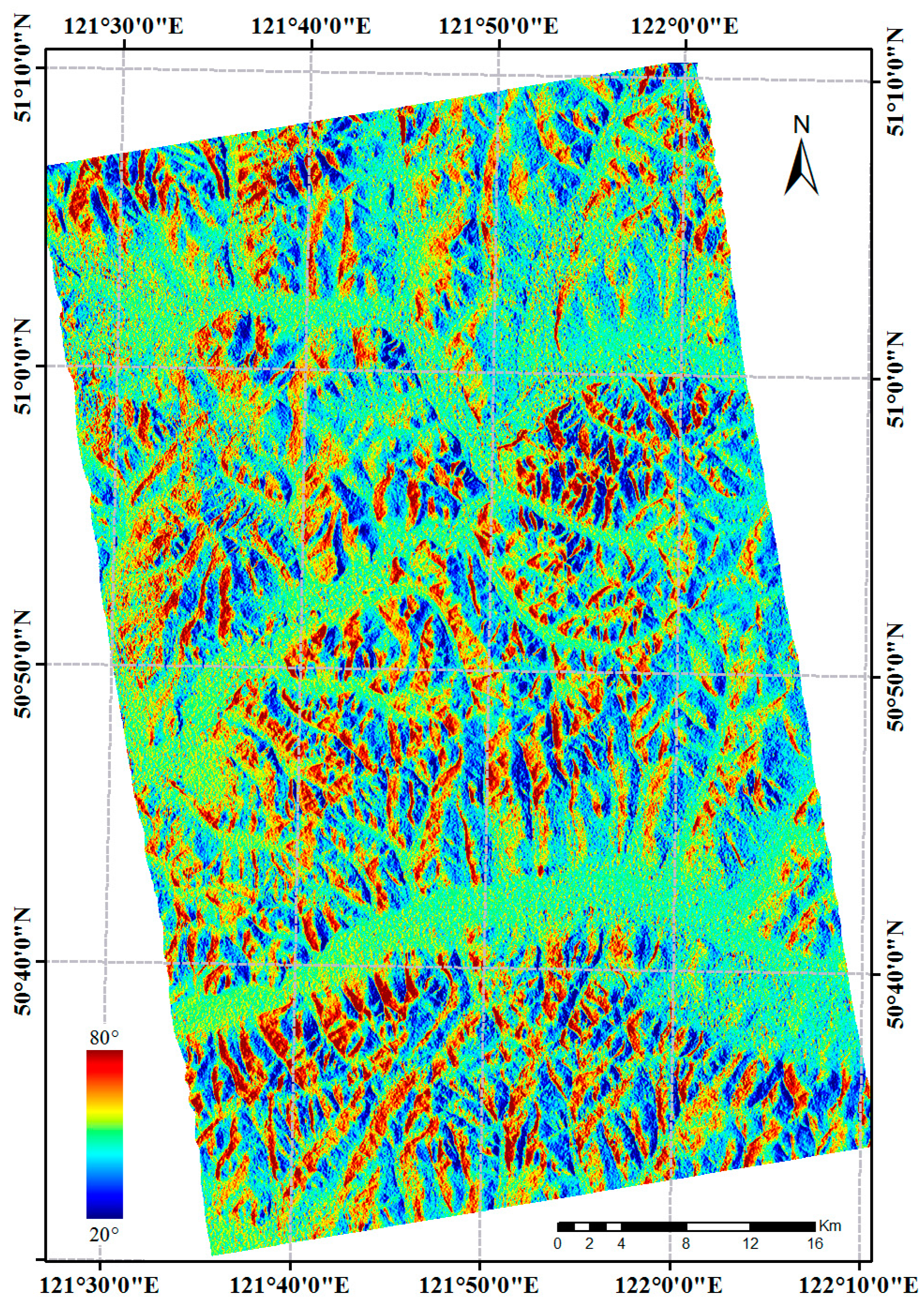
Figure 12). The ESA correction is then performed based on the projection angle
ψ (
Figure 10). Finally, the AVE correction is implemented based on the correction coefficient matrix
K.
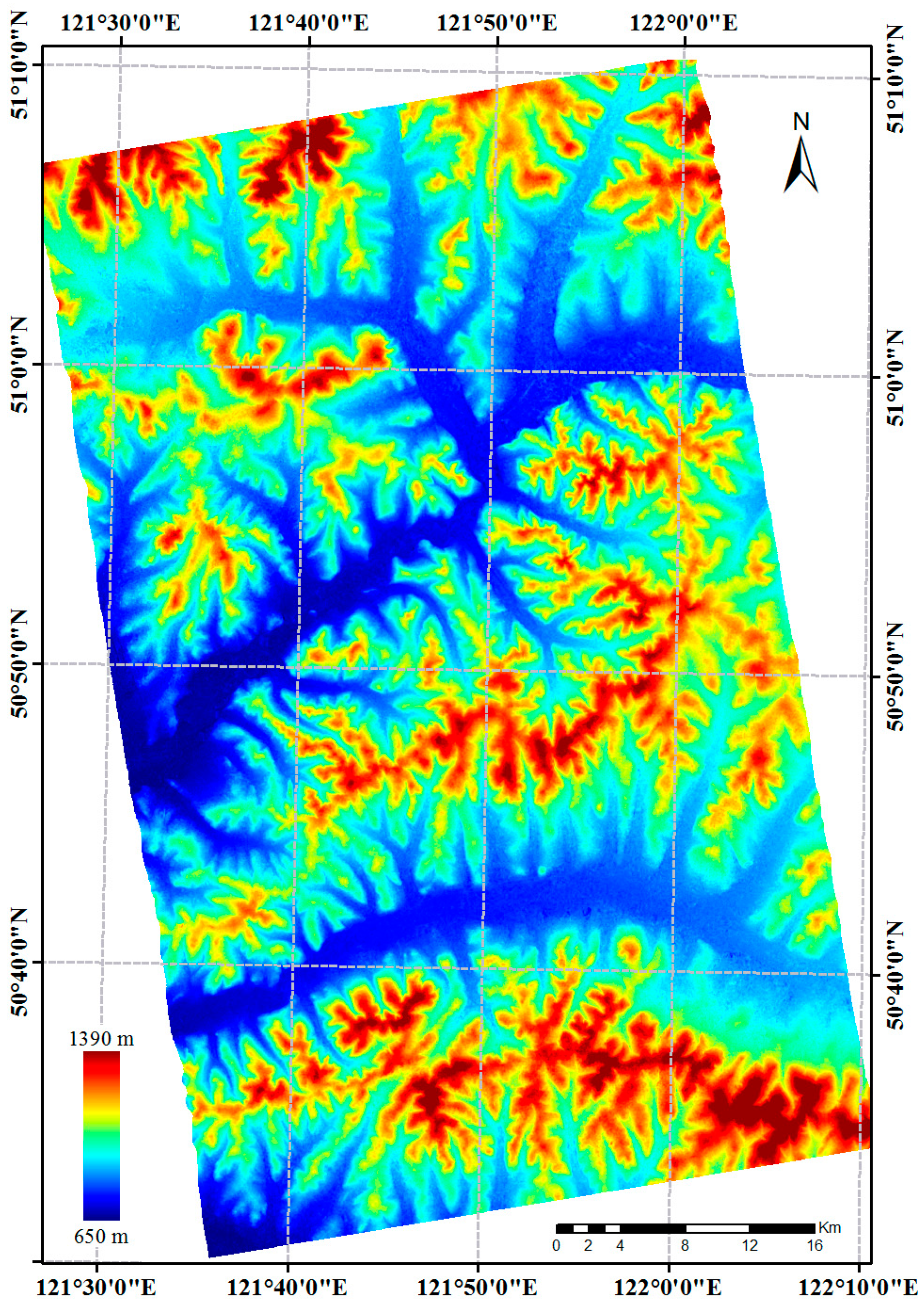
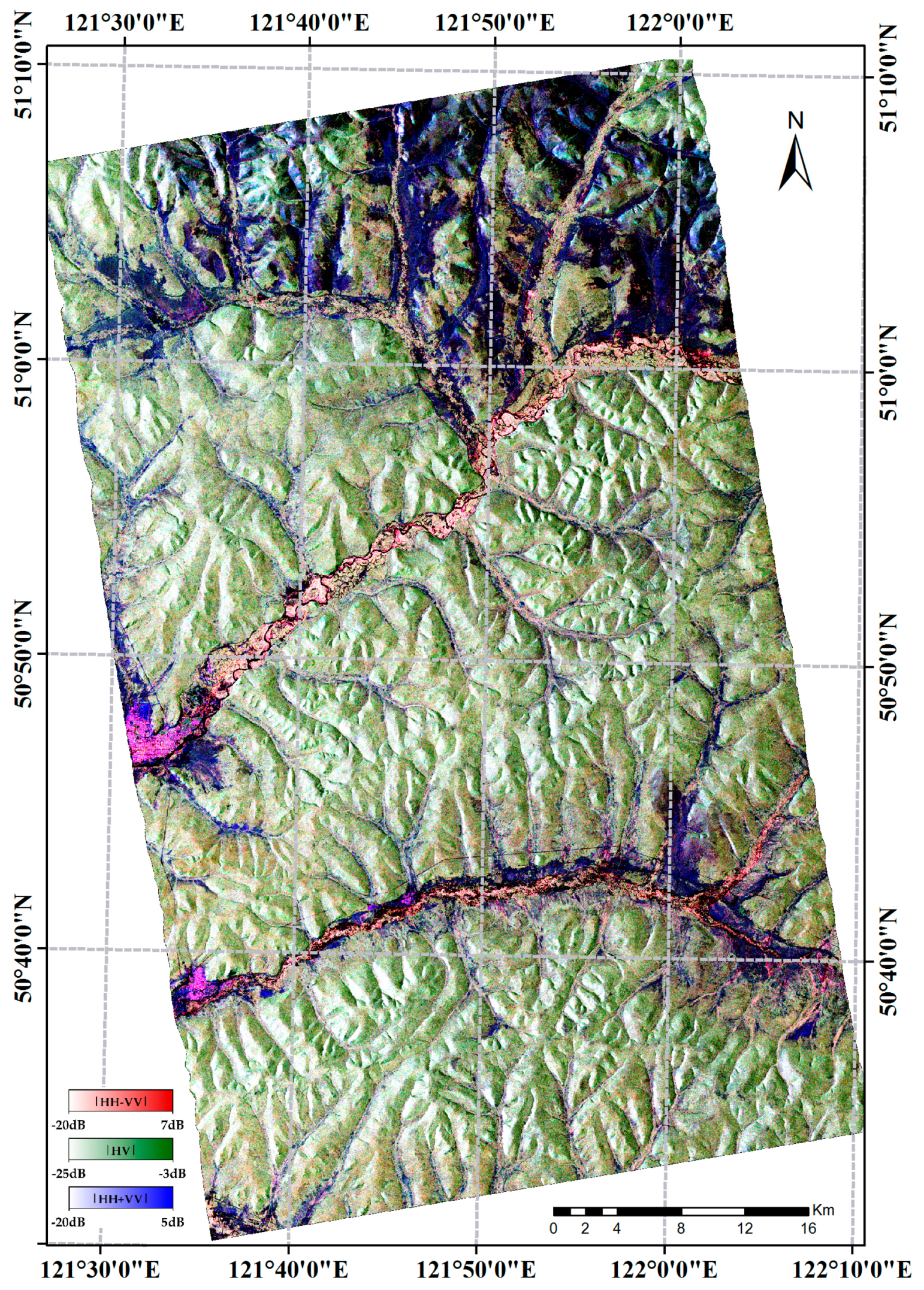
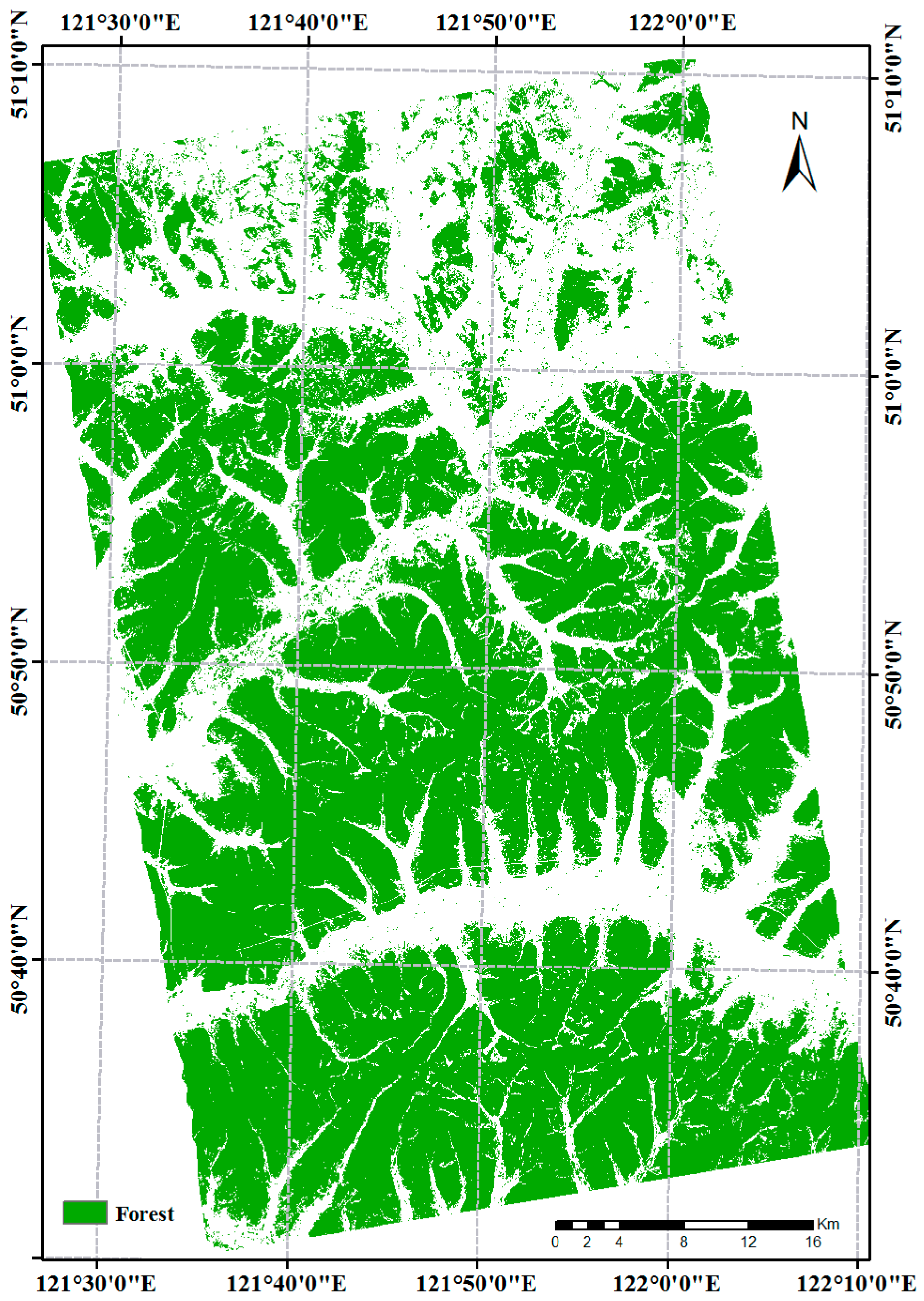
AVE correction requires the ability to distinguish land cover types. At our test site, forest is the dominant land cover, and it grows on areas with complex topography (
Figure 9), whereas non-forest areas are mainly distributed on the flat terrain (
Figure 8). Based on the PolSAR data following POA and ESA corrections, the forest cover map (
Figure 13) may easily be obtained by unsupervised classification using polarimetric decomposition and the complex Wishart classifier [
20]. Using the forest cover map as a mask file, we may then calculate the correlation coefficients between the AVE corrected backscattering values and the local incidence angle for various values of
n (Equation (10)). The results are shown in
Figure 14.
Figure 14 shows the correlation coefficients for the AVE corrected backscattering values for different polarisations and the local incidence angle as a function of
n. The correlation coefficients for different polarisations corresponding to the same value of
n are different, such that we should use different
n values for different polarisations during the AVE correction. In general, the effective range of
n is 0–1 [
13]. Using an iterative method at the effective range, we may easily determine the optimum value of
n when the correlation coefficient (Equation (12)) converges to a minimum value. In this study, the optimum values of
n for different polarisations were
nhh = 0.30,
nhv = 0.45, and
nvv = 0.63. With these values of
n, we may obtain the final correction matrix
K as:
If
n equals 1 for different polarisations, the result of the AVE correction is a standard backscatter coefficient
γ0 [
10], which is frequently used in research on forest areas [
4]. The
γ0 is essentially a special case of the AVE correction model. Therefore, it may be not suitable in all situations. An analysis of
n based on
Figure 14 shows that a uniform and fixed value of
n is not an ideal choice for PolSAR data.
3.3.2. Analysis of Terrain Correction Results
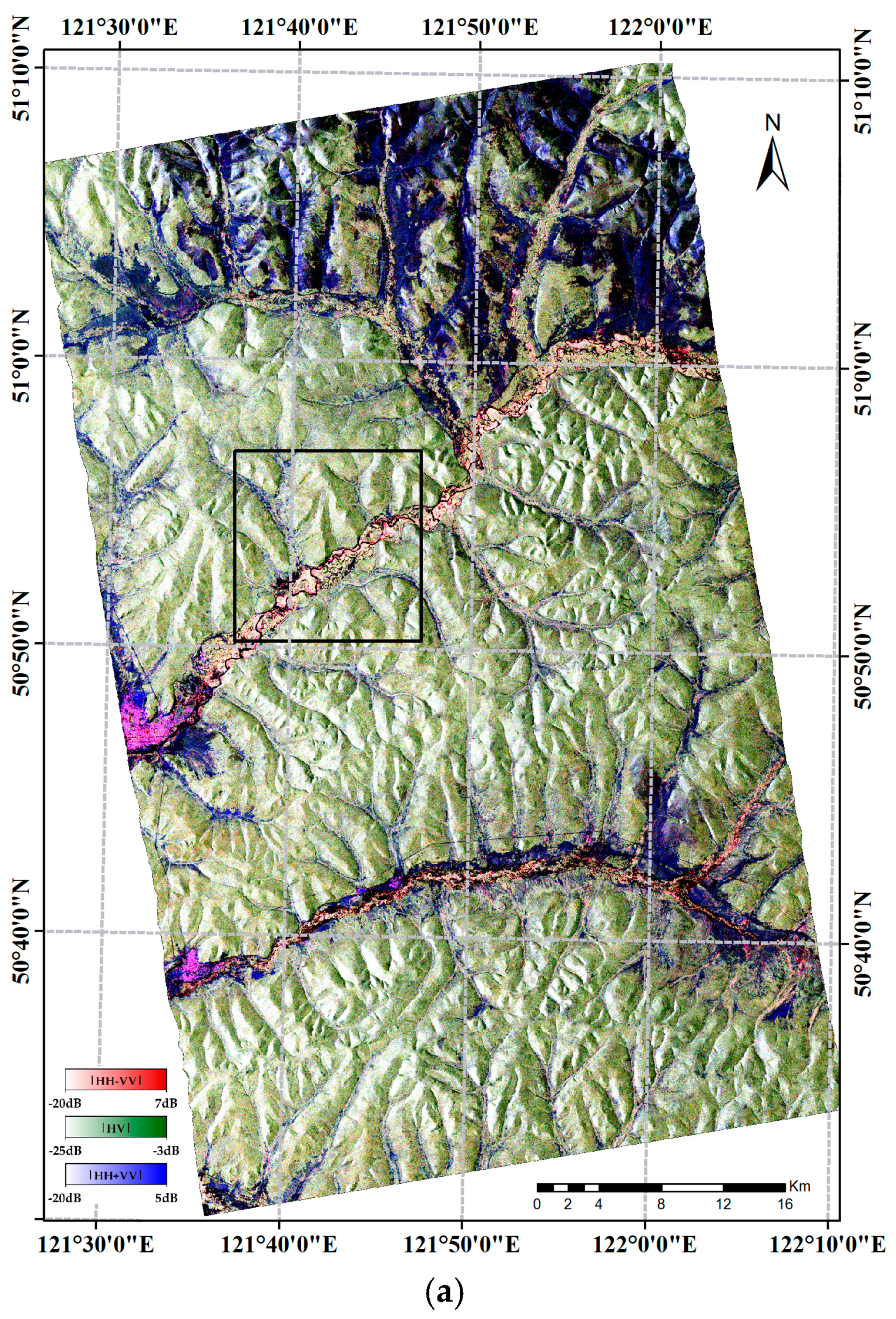
Figure 15a presents the Pauli RGB image of PolSAR data after POA correction. Compared to the uncorrected case (
Figure 9), there appears to be no significant difference. This is because visual terrain effects on PolSAR image results are mainly due to the difference between front and back slopes in the range direction. In contrast, the impact of azimuth terrain is relatively weak in the case of an entire scene PolSAR image. Thus, there are no obvious visual changes after POA correction.
Figure 15b shows further results after ESA correction. The radiometric distortions due to terrain relief were strongly reduced compared to the PolSAR images shown in
Figure 9 and
Figure 15a. However, there are still subtle topographic effects on local details of the PolSAR image. The final result after AVE correction is shown in
Figure 15c. Topographic effects have effectively been removed from
Figure 15b, and there is no obvious visual difference between the pixels on the front and back slopes.
Because the range of the PolSAR image is large,
Figure 15 appears small. Details in the PolSAR images are not easy to observe. Therefore, we display an enlarged area in
Figure 15 (black polygon) for more detailed demonstration (
Figure 16). Enlarged images of GTC PolSAR, POA shift angle, and local incidence angle are shown in the area. In the enlarged images, greater detail of different correction steps may be seen, particularly when compared to the enlarged images of POA shift angle and local incidence angle. For example, in the regions where the POA shift angle is larger (
Figure 16e, red), the PolSAR image of GTC (
Figure 16a) is greener than the PolSAR image for the POA correction (
Figure 16b). This means that cross-polarisation was overestimated in these regions. Compared with the middle regions of
Figure 16c,d,f, improvements made by the AVE correction may be seen more clearly.
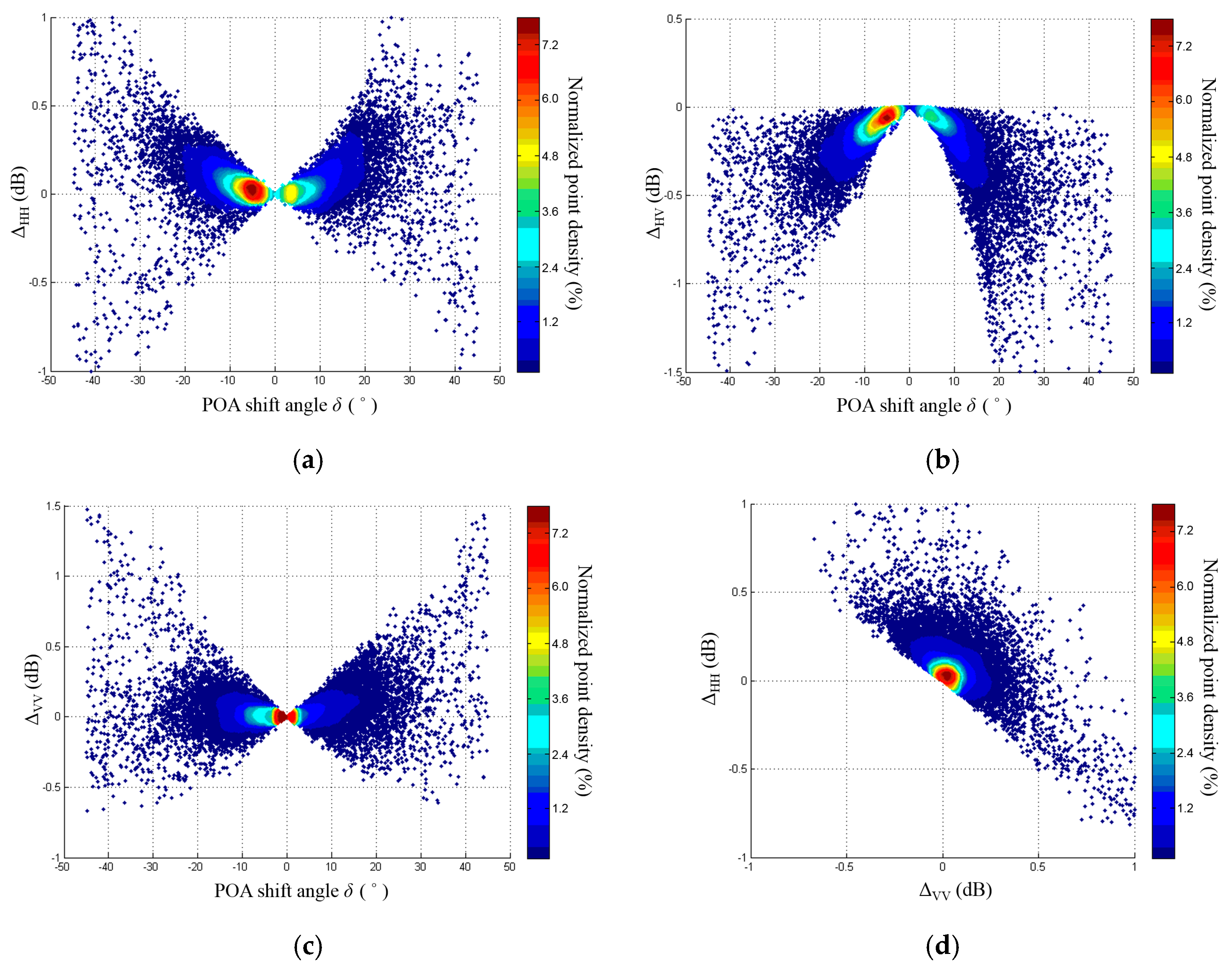
To evaluate the effectiveness of the three-step correction method, we conducted a deeper analysis. For the POA correction, the relationships between the POA shift angle and the differences between corrected and uncorrected PolSAR data were analysed.
As shown in
Figure 17, Δ
HH, Δ
HV, and Δ
VV were the differences between the corrected and uncorrected backscattering coefficients for different polarisations (corrected − uncorrected pixel values). With increasing POA shift angle, the numerical ranges of Δ
HH, Δ
HV, and Δ
VV increased. The values of Δ
HH and Δ
VV may be positive or negative, and the proportion of positive values was relatively large; however, the value of Δ
HV may only be less than zero. These patterns indicate that a POA shift will cause overestimation of the backscattering coefficient of HV polarisation. Because of the conservation of polarimetric span, HH and VV polarisation cannot be overestimated simultaneously; that is, Δ
HH and Δ
VV cannot be negative at the same time (
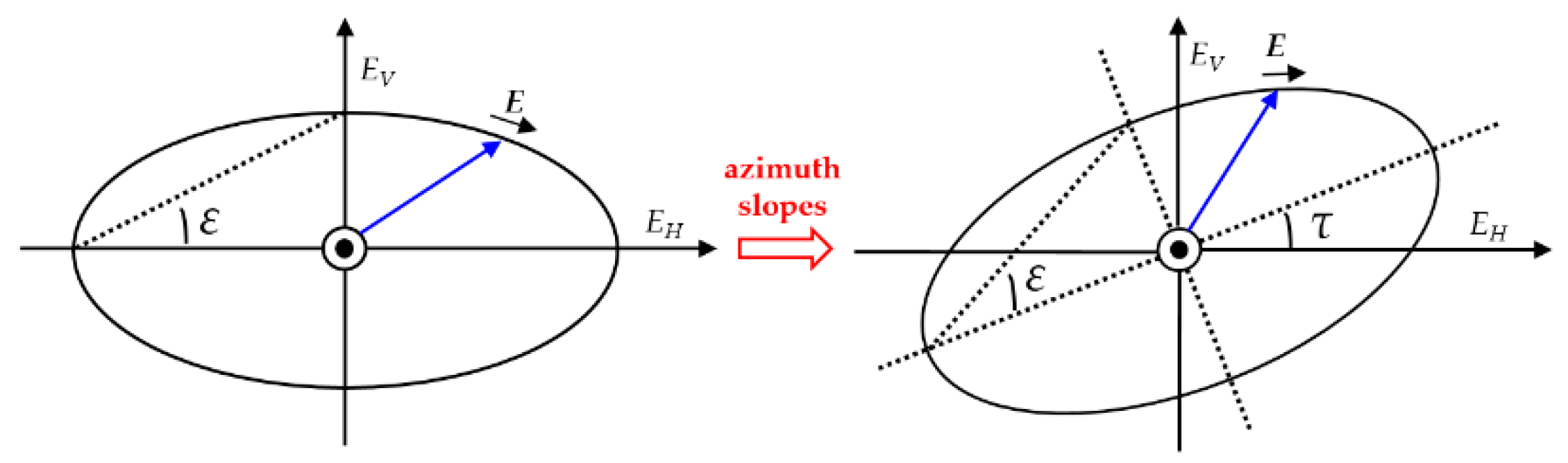
Figure 17d). Additionally, the POA shift exerted more influence on HV polarisation than HH and VV. For example, when the POA shifted by approximately 20°, the maximum biases of HH and VV polarisation were approximately 0.5 dB, while that of HV polarisation was greater than 1 dB. This also indicates that POA correction is an indispensable step for terrain correction of PolSAR data. These different behaviours can be explained by the physical basis of the POA shift. When polarimetric radar images a horizontal surface, the horizontal polarisation electric field of transmitted and received data is parallel to the surface. For a tilted surface, however, the horizontal electric field of transmitted data is no longer parallel to the horizontal surface. However, the horizontal electric field of received data is parallel to the tilted surface. Therefore, there is a shift in angle between the transmitted and received electromagnetic wave vectors. Consequently, the horizontal-transmitting and vertical-receiving (HV) components are increased and horizontal-transmitting and horizontal-receiving (HH) components are decreased, due to the tilted slope. In the case of a vertical polarisation wave, a similar phenomenon occurs. Therefore, the basic rule is that cross-polarisation (HV) will be overestimated and co-polarisation (HH + VV) will be underestimated due to the POA angle shift.
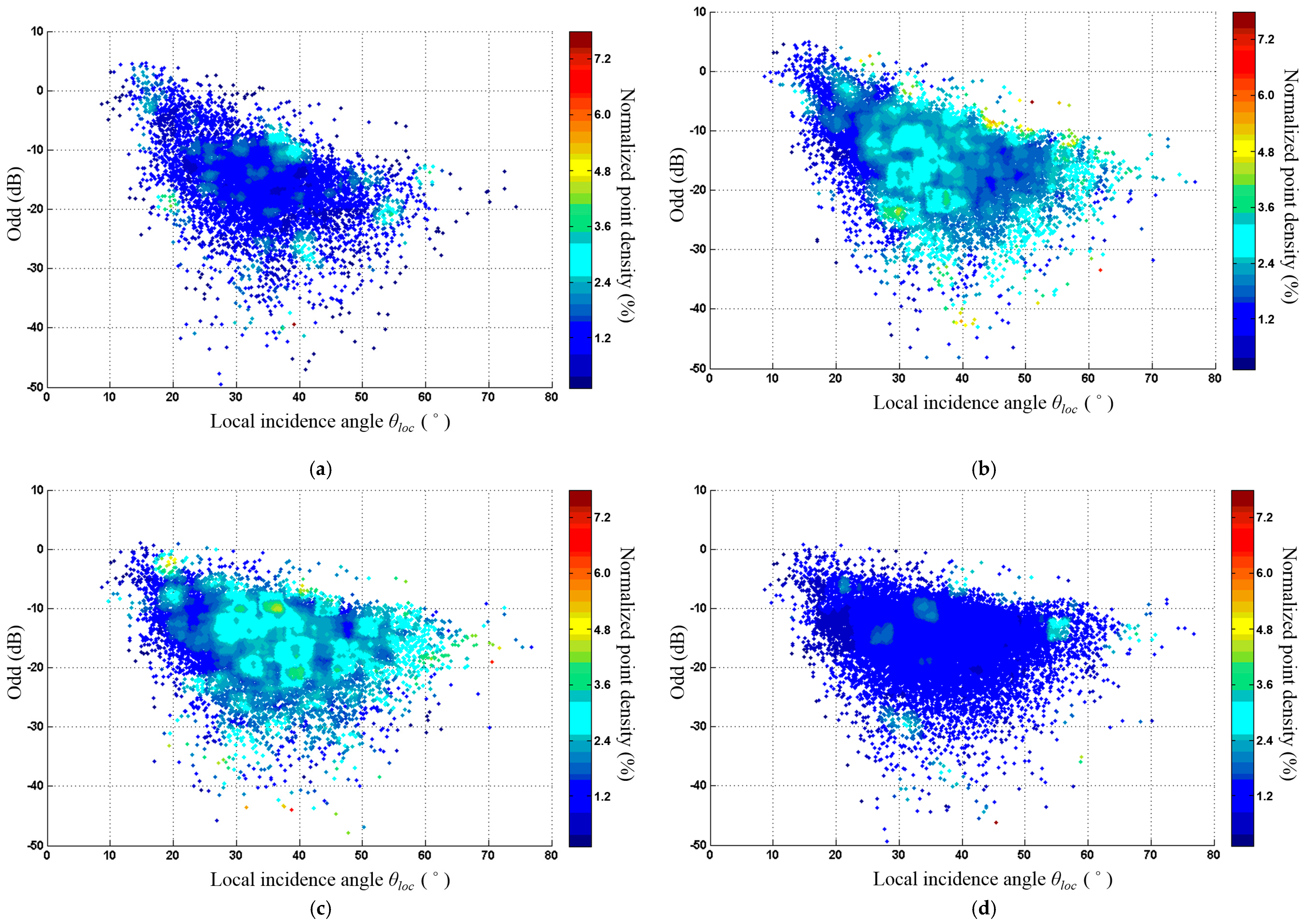
We then analysed the relationship between backscattering coefficients of different polarisations and the local incidence angles at different correction steps.
Figure 18 presents the backscattering coefficients of different polarisations as a function of the local incidence angle (
θloc). And we divided PolSAR data into three groups according to the 33.3th and 66.6th percentile of
θloc, the statistical characteristics of each group were calculated and are displayed in
Figure 19. For the PolSAR data without ESA correction (
Figure 18a,d,g), clear linear relationships were found between the backscattering coefficient and
θloc for each polarisation channel. We observe higher backscattering values for the small
θloc of front slopes, and lower values for the large
θloc of back slopes. The difference of backscattering value between large
θloc group and small
θloc group is about 3 dB (
Figure 19). Following ESA correction (
Figure 18b,e,h), this phenomenon was effectively relieved. And the difference of backscattering value between large
θloc group and small
θloc group is reduced to about 0.5 dB (
Figure 19). However, as
θloc increased, backscattering values continued to decrease. Complex terrain effects on the corrected PolSAR data clearly remain (
Figure 15b and
Figure 16c). However, as shown in
Figure 18c,f,i, the residual terrain effect was further removed by AVE correction. And the difference of backscattering value between large
θloc group and small
θloc group is reduced to about 0.1 dB (
Figure 19). These behaviours are due to the scattering mechanism of the actual forest; it cannot be pure surface scattering or ideal volume scattering. In the case of an ideal surface scattering target, ESA correction was sufficient. For an ideal volume scattering target,
γ0 was more suitable, in that it remained approximately constant for all incidence angles [
21]. Therefore, this may be the reason why ESA correction is insufficient and AVE correction is required.
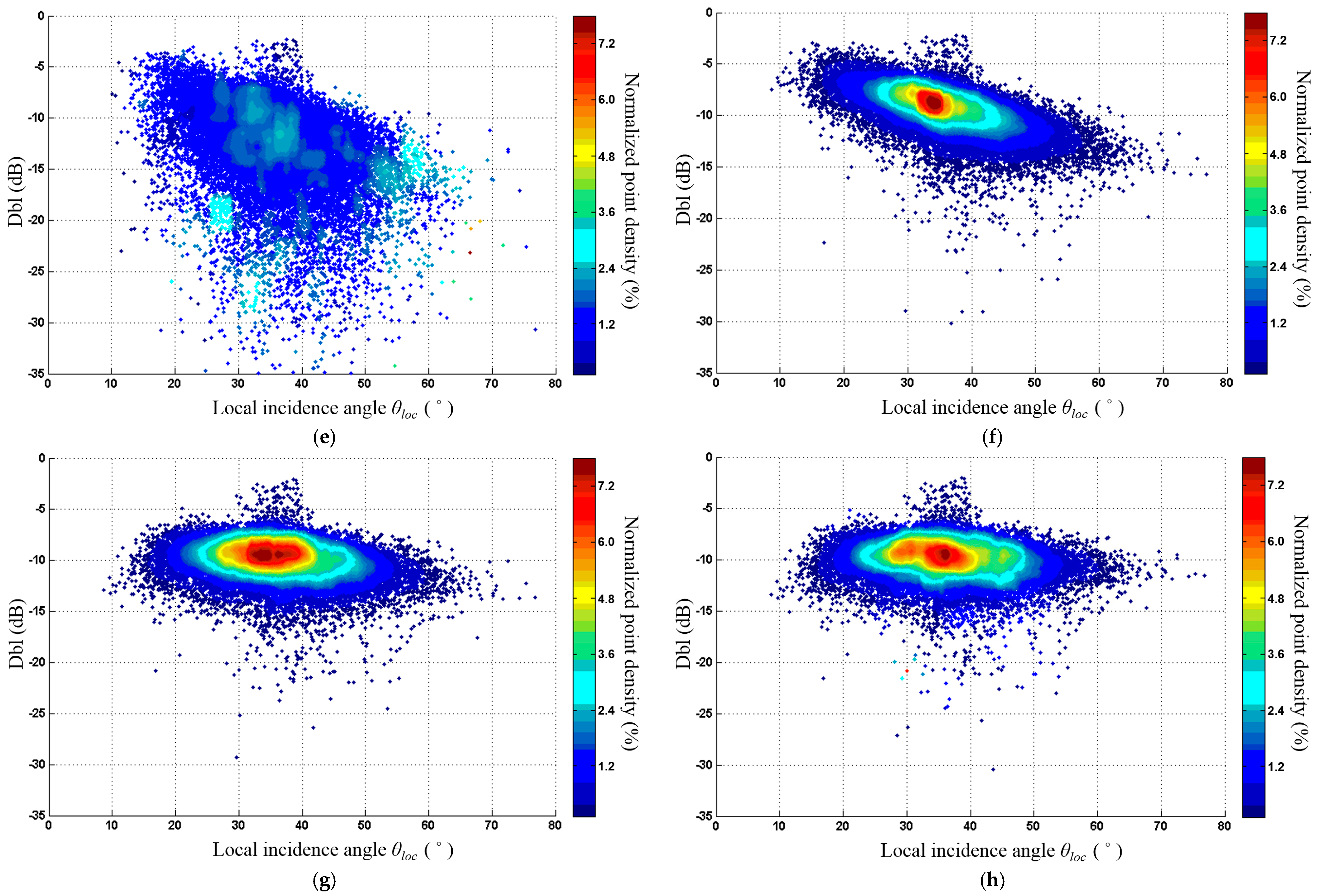
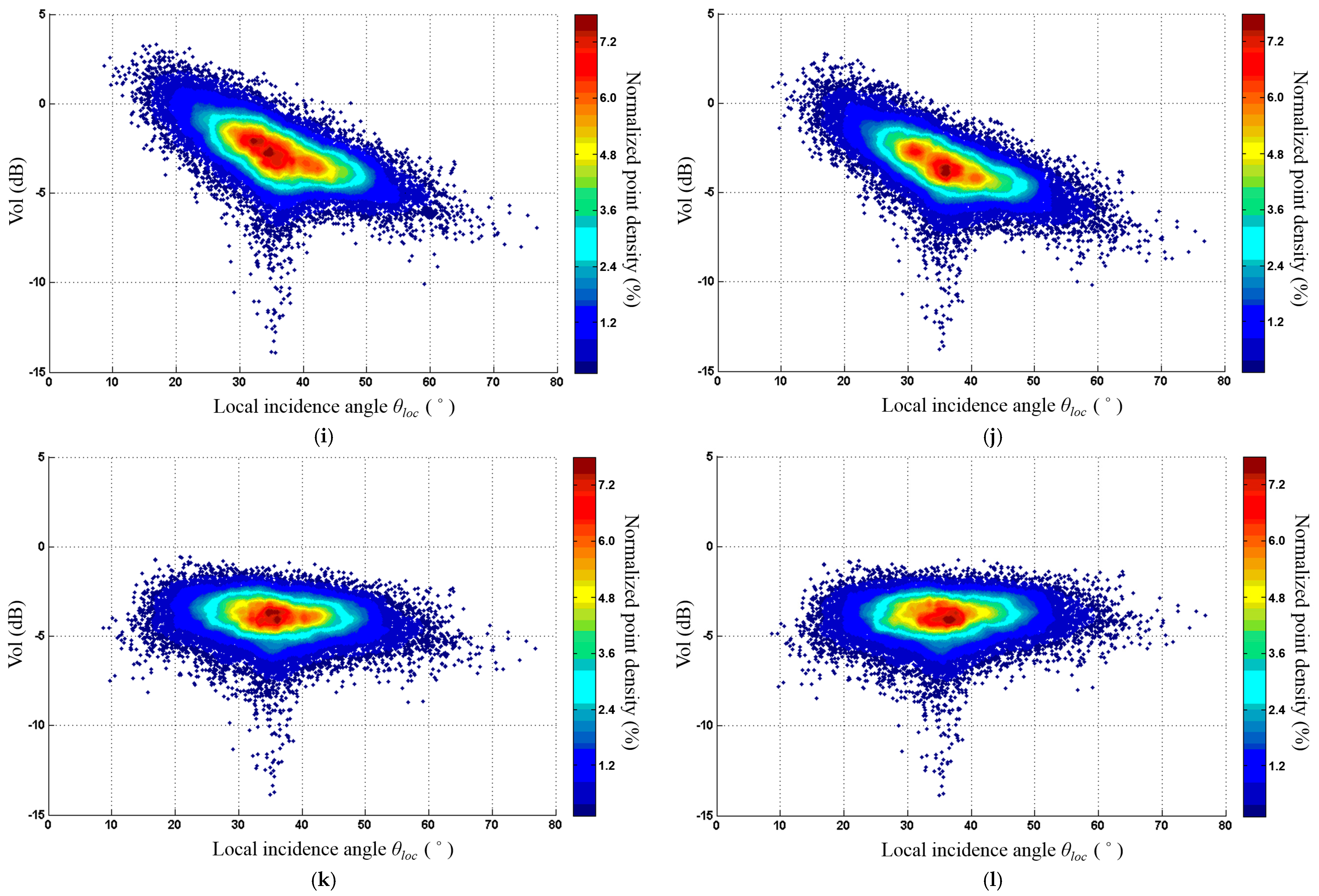
Using the Yamaguchi four-component decomposition as an example [
22], we also analysed the relationship between polarimetric decomposition parameters and the local incidence angle at the different correction steps (
Figure 20). These four polarisation parameters can be obtained from PolSAR matrix data at different correction steps by Yamaguchi four-component decomposition, which includes surface scattering power (Odd), double-bounce scattering power (Dbl), volume scattering power (Vol) and helix scattering power (Hlx). As shown in
Figure 20a,e,i,m, the decomposition parameters derived from GTC PolSAR data and also as a function of the local incidence angle exhibit linear behaviour, with higher decomposition parameter values for low
θloc, and lower values for the high
θloc. ESA correction also plays a major role in determining all decomposition parameters. This is because a larger ESA value corresponds to larger decomposition components. Comparing the scatter plots for the different correction steps, the behaviour at different correction steps is similar to that shown in
Figure 18. For the Odd and Hlx components, the terrain effect was relieved only at the ESA correction step. In the case of the Vol component, the terrain effect was relieved mostly at the ESA correction step, whereas AVE correction can further remove the residual terrain effect. However, for the Dbl component, all three correction steps were useful. The POA correction significantly reduced the dispersion of the points (
Figure 20f), and ESA and AVE corrections further removed terrain effects (
Figure 20g,h). This result may be due to the correction of not only the principal diagonal elements but also non-diagonal elements of the polarisation covariance matrix. Overall, the RTC results indicate that the best correction results were due to the Dbl and Vol components, which were the dominant scattering mechanism for the forest. ESA correction was still the most important correction step, but only ESA correction fails to remove the terrain effects completely.
3.3.3. Effectiveness of the Three-Step RTC for Forest AGB Estimation
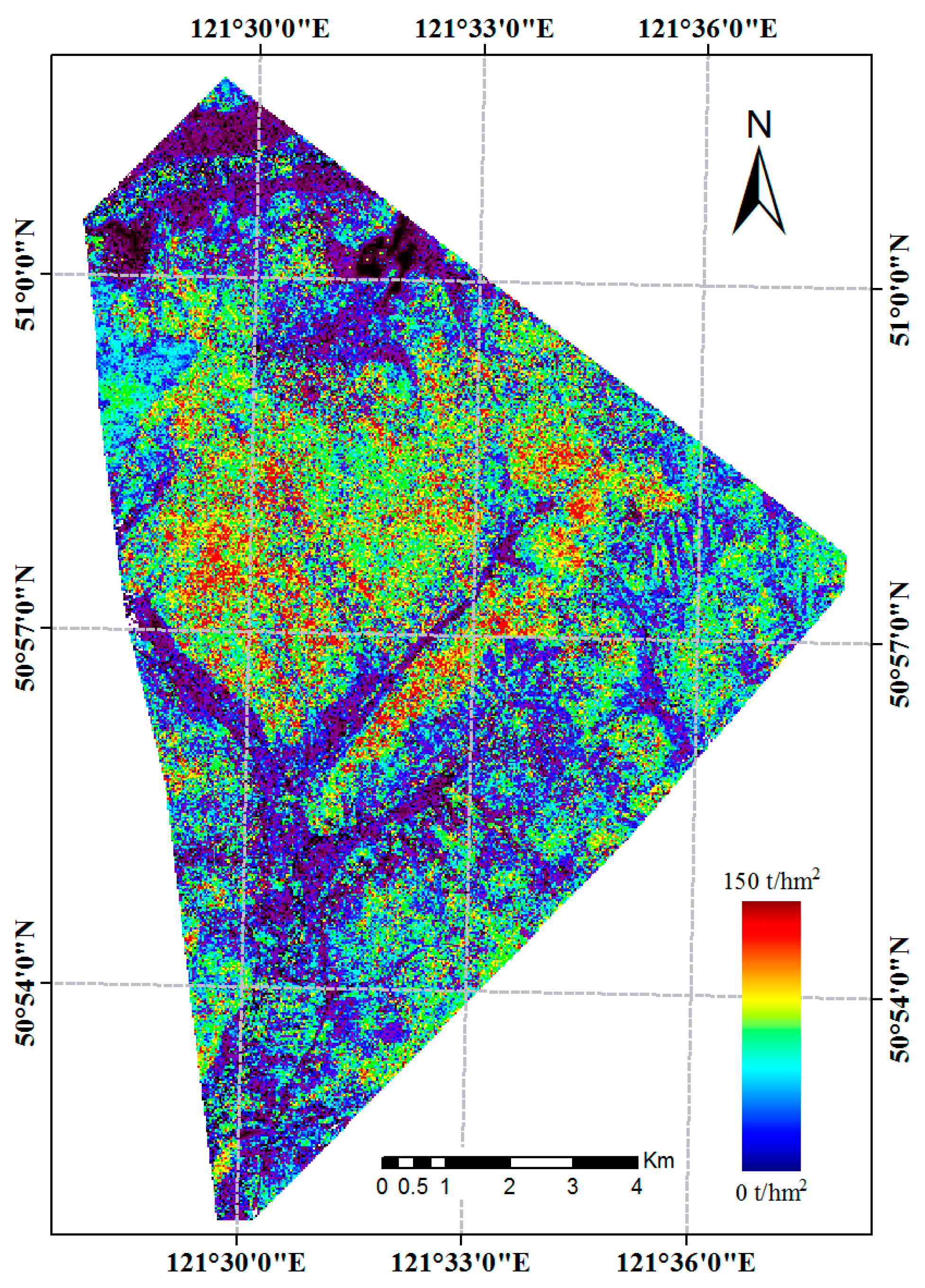
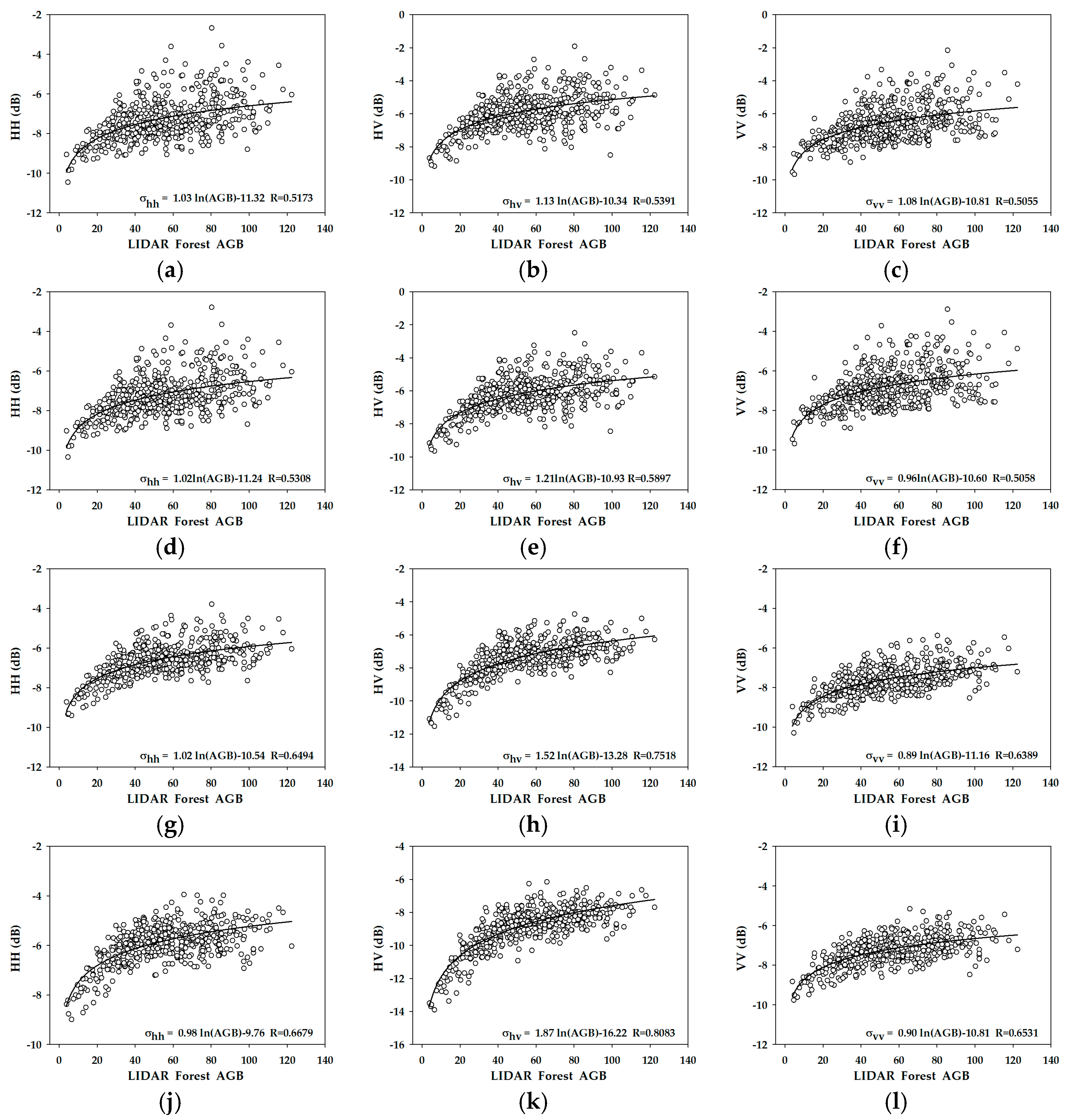
One of the key applications of RTC in forest areas is to reduce biomass estimation error caused by uneven topography. For further verification of the effectiveness of the three-step RTC method for forest AGB estimation, we analysed the relationship between the LiDAR-derived forest AGB data and the backscattering coefficients of the uncorrected (GTC) and corrected (POA, POA + ESA, POA + ESA + AVE) PolSAR data at the test site (
Figure 5, green rectangle;
Figure 7), as shown in
Figure 21. Black lines indicate the regression curve of a logarithmic equation. The correlation coefficient (R) of regression model was calculated and displayed in each plot. The method of statistical regression is least squares can refer to [
23]. There were 518 points in each plot, which were extracted from LiDAR-derived AGB data and PolSAR data for different correction steps. To ensure the reliability of the results, non-forest points were masked and the points at the forest edge were also excluded. The spatial interval between two points is 90 m, and the value for each point was a mean value of the surrounding pixels. Thus, the influence of geographical coordinate error between LiDAR data and PolSAR data was reduced.
Figure 21a–c shows the scatter plots of LiDAR-derived forest AGB and backscattering coefficients before three-step RTC processing, and
Figure 21d–l shows the same result after processing at each correction step. This shows that three-step RTC can significantly reduce the dispersion of the points. All of the correlations between the backscattering coefficients of each of the three polarisations and the forest AGB were improved; the lowest R value in the POA + ESA + AVE correction step (
Figure 21j–l, VV polarisation) was larger than the highest R value in the uncorrected case (
Figure 21a–c, HV polarisation). The backscattering coefficients for HV polarisation after RTC processing (
Figure 21k) had the best correlation with forest AGB, whose R value was 0.8083, while the corresponding R value for HV polarisation before RTC processing was only 0.5391. The contributions of POA, ESA and AVE to correlation coefficient were 0.05, 0.16 and 0.06, respectively. In the case of co-polarisation, similar phenomena were observed.
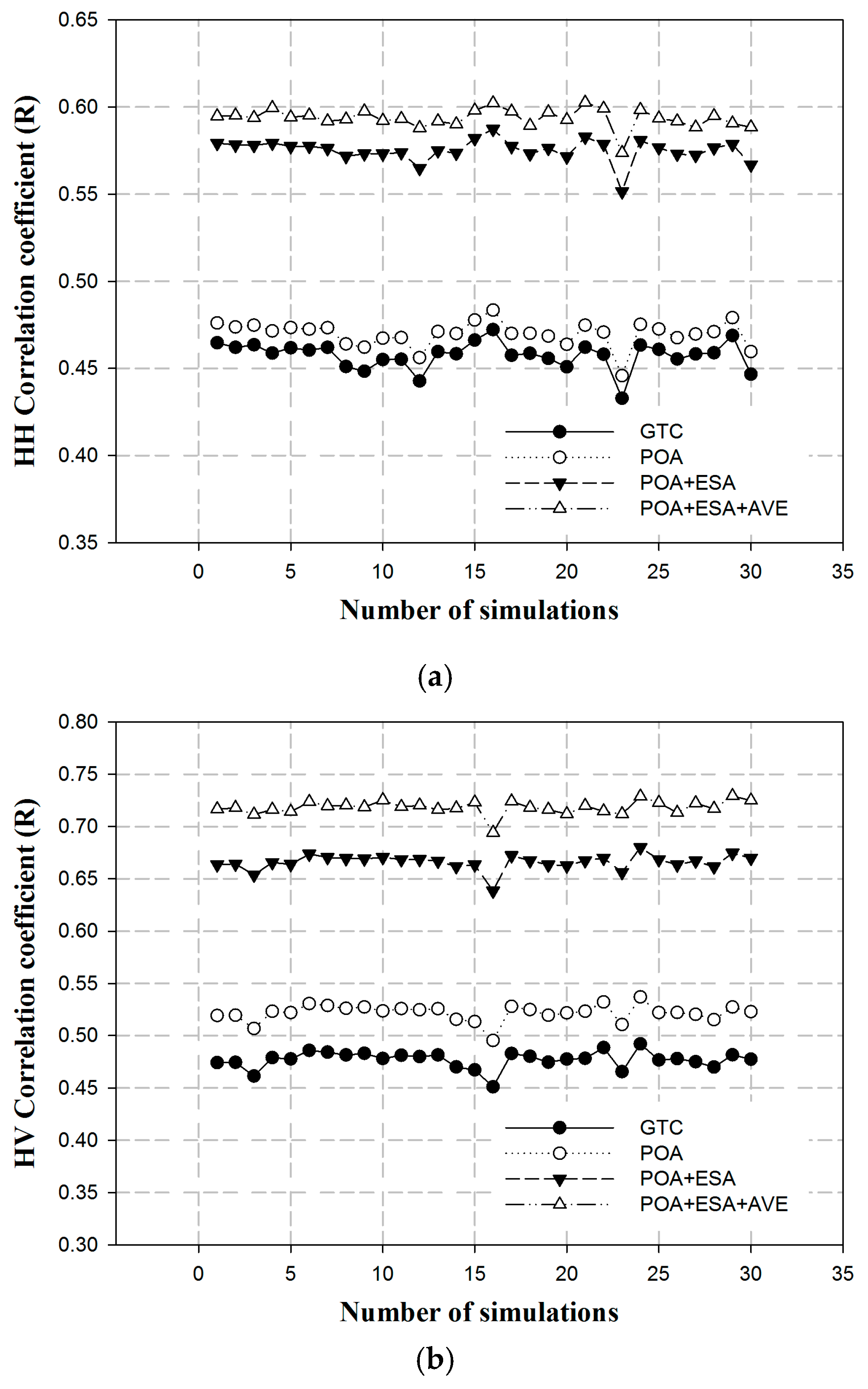
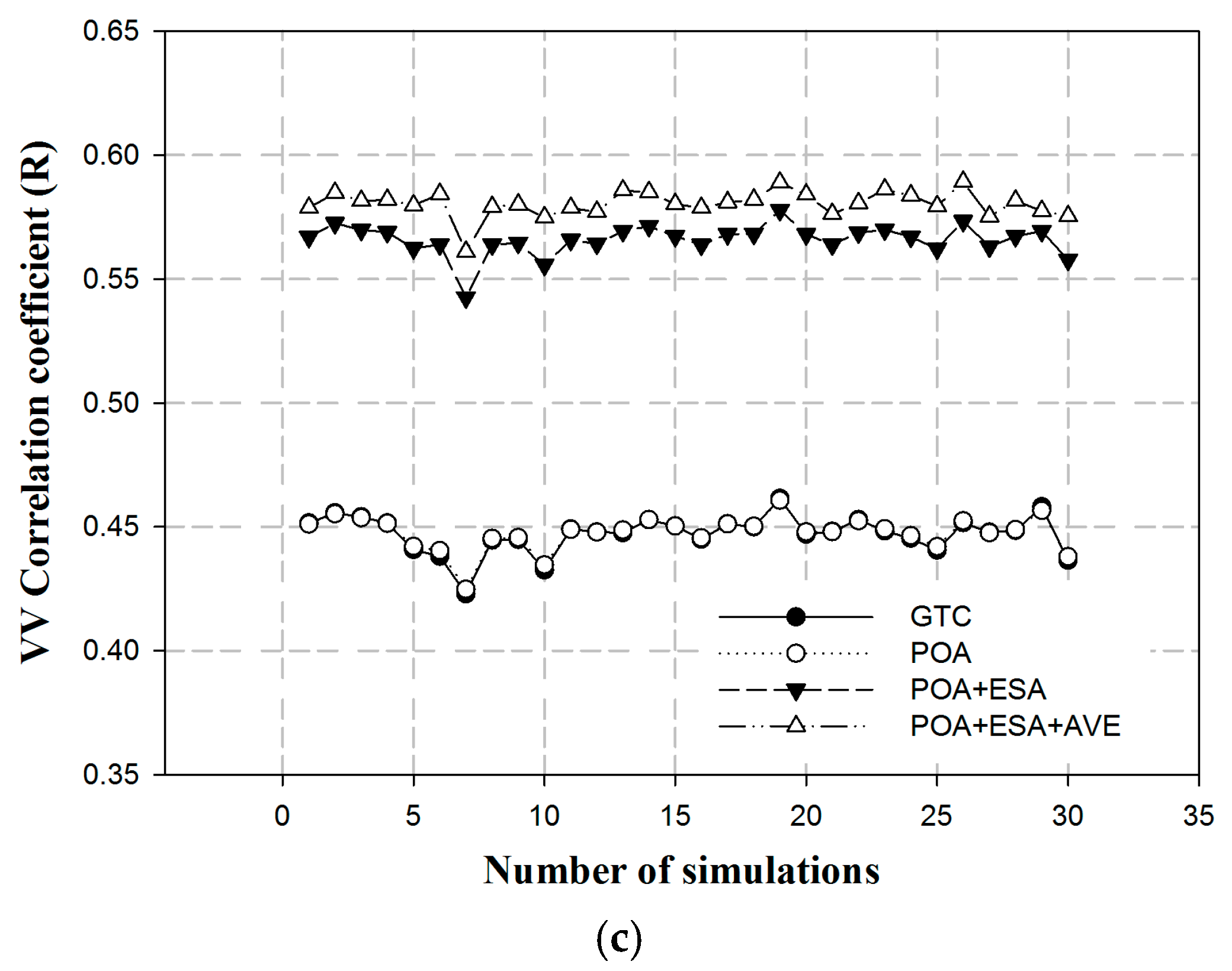
To evaluate the robustness of the regression results, we conducted an uncertainties analysis of LiDAR forest AGB and backscattering coefficients of different correction steps. For the former, the uncertainty is mainly due to the estimation error of forest AGB. For the latter, the uncertainty is mainly due to the accuracy of the DEM data. First of all, an additional error term of Gaussian distribution (Mean: 0; Standard deviation: 23.1 t/hm
2) was added in the LiDAR forest AGB. The standard deviation of error term is equal to the RMSE of LiDAR forest AGB. Based on this error term, simulated forest AGB data can be generated and used for regression. We calculated the correlation coefficients for each regression, as shown in
Figure 22. Overall, the correlation coefficient of different polarisation and different correction step decreased due to the additional error terms. However, the proportion of the contribution of different correction steps to correlation coefficient is consistent with
Figure 21. In HV polarisation, for example, the mean contributions of POA, ESA and AVE were 0.04, 0.15 and 0.05, respectively.
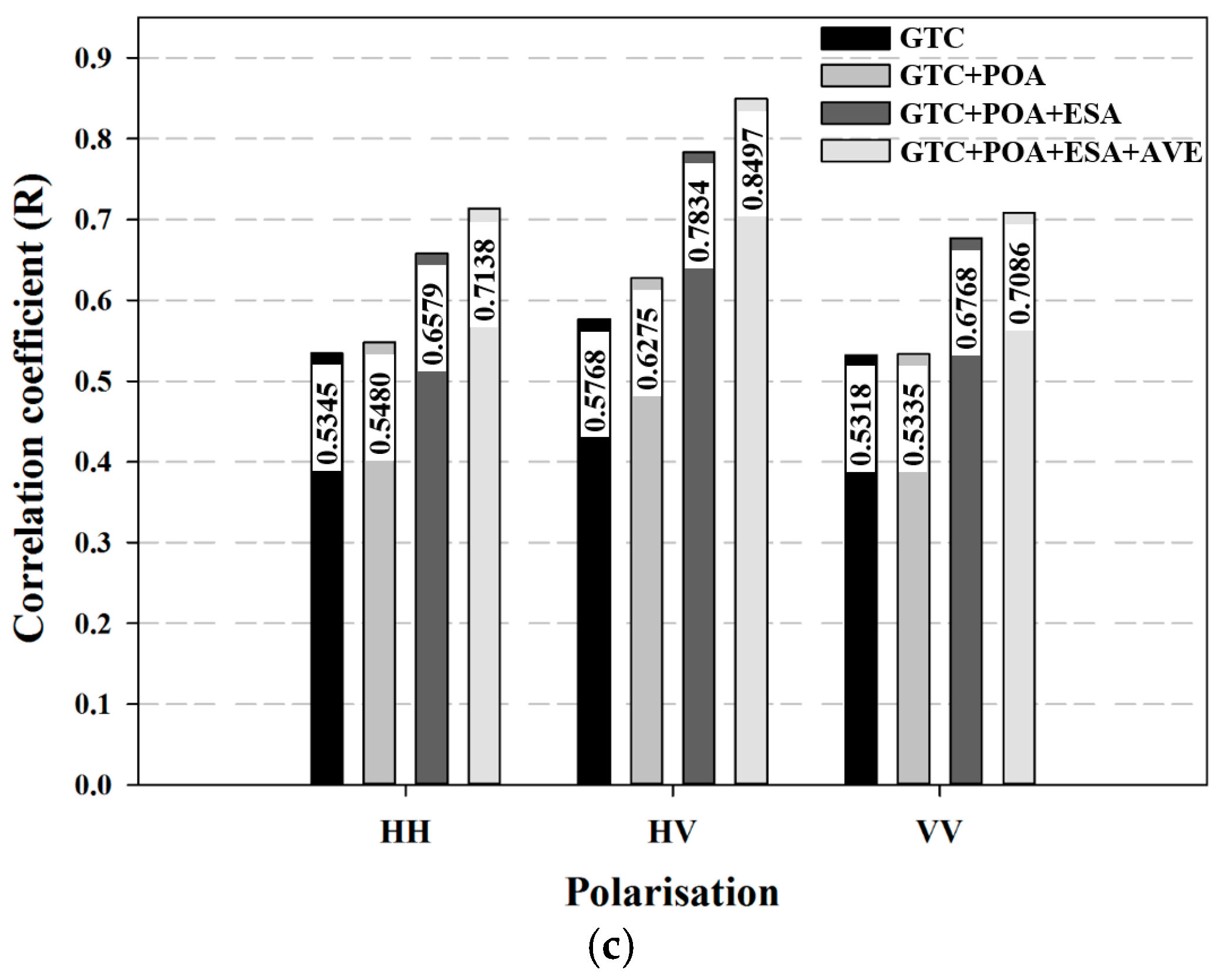
Secondly, it is the uncertainty caused by DEM. In this respect, we re-verified the results using SRTM DEM (30m).
Figure 23 shows the validation results. In repeated experiments, the geocoding accuracy of azimuth and range directions were 0.17 and 0.22 pixels in the GTC process. This is slightly higher than the accuracy based on ASTER DEM. And the optimum values of
n for different polarisations were
nhh = 0.31,
nhv = 0.49, and
nvv = 0.61. This is basically consistent with the ASTER DEM-based parameters.
Figure 23a shows the correlation between
ψ of ASTER DEM and
ψ of SRTM DEM, whose R value was 0.9281. And
Figure 23b shows the correlation between
θloc of ASTER DEM and
θloc of SRTM DEM, whose R value was 0.9257. This shows that similar imaging geometric angles were achieved by SRTM DEM compared with ASTER DEM.
Figure 23c shows the correlation coefficient between backscattering coefficients of different correction steps and LiDAR forest AGB. We can see that similar results were obtained based on SRTM DEM compared with ASTER DEM. In HV polarisation, for example, the R value of GTC, POA, ESA and AVE were 0.5768, 0.6275, 0.7834 and 0.8497, respectively. The contributions of POA, ESA and AVE to correlation coefficient were 0.05, 0.16 and 0.07, respectively. Overall, the R value of SRTM DEM were slightly higher than that of ASTER DEM. The reason may be that higher geocoding accuracy and more reliable imaging geometric angles can be obtained by SRTM DEM compared with ASTER DEM. However, this requires further and more detailed researches to confirm.
Thus, we conclude that the three-step RTC method improves the power of PolSAR data to estimate forest AGB in uneven topography conditions. There is no doubt that ESA correction is the most important correction for improving biomass estimation, although POA and AVE corrections are also important. Additionally, the method developed in this study is fully suitable for PolSAR data in a matrix format, for example, covariance or coherency matrices. We can also extract the most sensitive polarisation parameters from the matrix data after RTC processing to construct a forest AGB inversion model, which will further improve model performance.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





























