1. Introduction
Multistatic synthetic aperture radar (SAR) has more than one transmitter and receiver, which makes it obtain more information of targets at different angles of view. Current studies on multistatic SAR mainly focus on imaging algorithm [
1,
2,
3,
4], synchronization [
5], experiments [
6] and target detection [
7,
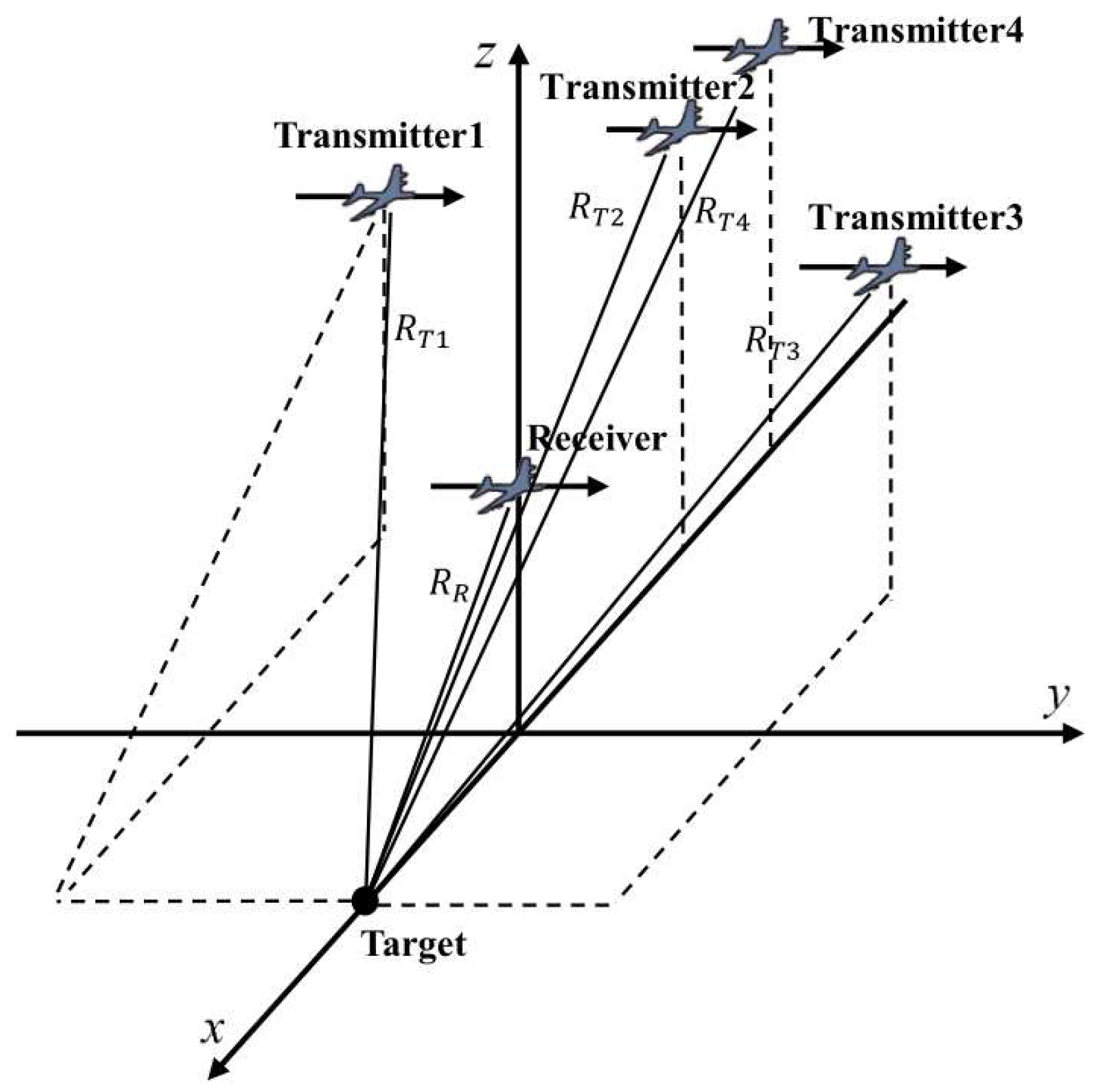
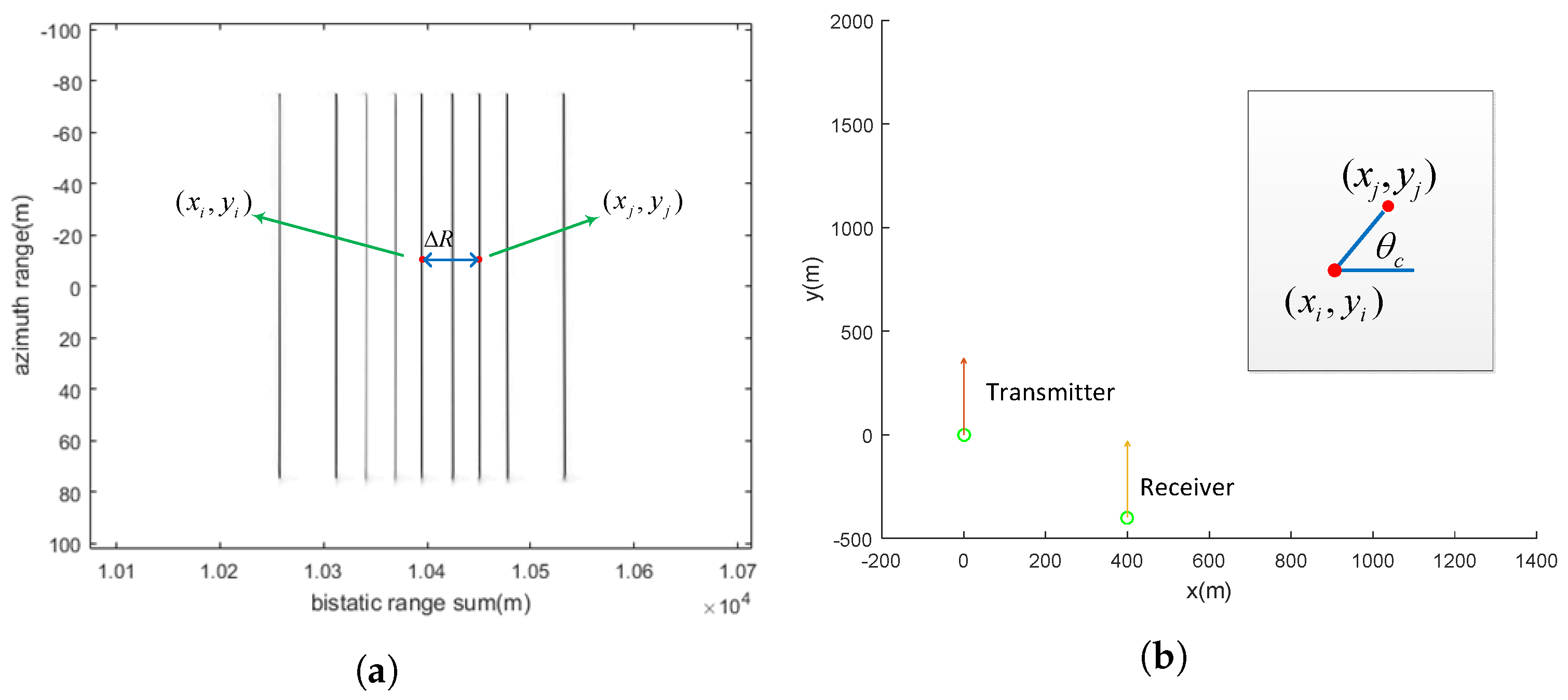
8]. Target localization is of significant importance for both monostatic and multistatic SAR applications. It is necessary for ensuring the geometry calibration accuracy and effective understanding and interpretation of the radar images. Target localization plays a key role in target reconnoitering, map mapping and flood disaster evaluation. Therefore, it is significant to research the method and accuracy of localization. However, very limited research works are reported on this aspect for multistatic SAR. In addition, different from monostatic SAR, multistatic SAR can obtain more target information. Therefore, it makes the three-dimensional localization possible. To obtain the location information, generally we need to know the bistatic range sum (BRS). Nevertheless, multistatic SAR has more complicated geometrical relationships, as the transmitters and receivers are independent of each other. The double hyperbolic range histories lead to double square roots in the range equation of every transmitter and receiver (T/R) pair in multistatic SAR. Therefore, we can see that the localization of multistatic SAR, compared with monostatic SAR, is much more complicated.
For geolocation of monostatic SAR, there are three different kinds of localization methods. They are positioning with stereo SAR images, the fundamental principles of interferometric SAR images for positioning and positioning with a single SAR image. Positioning with stereo SAR images is based on the SAR structure model. Additionally, the three-dimensional coordinates of the corresponding ground points are calculated by the coordinates of the same image points of two SAR images. However, the number and the spatial distribution of ground control points can influence the accuracy of target localization [
9]. The fundamental principles of interferometric SAR images for positioning utilize the interferometric phase information to achieve the target localization [
10]. However, the target height information that is obtained with interferometric SAR has large error in areas with dramatic altitude changes, such as mountain terrain. Positioning with a single SAR image is based on the range-Doppler (RD) model for spaceborne monostatic SAR [
11,
12]. Additionally, target coordinates can be obtained by solving the range equation and Doppler equation. However, this method cannot obtain target height information.
When it comes to the localization problem of multistatic SAR, the three-dimensional localization is a significant advantage of multistatic SAR, but has not received enough attention. In [
13], a three-dimensional surface reconstruction method is proposed. It uses the information of BRSs and phases of the target in each T/R pair image to solve the height of the target. However, it only uses the first order approximation of the height estimation function’s Taylor expansion. When the height range becomes larger, its accuracy cannot satisfy the request of localization. The localization problem in multistatic SAR is similar to localization in the ground-based multistatic radar system. There are some localization methods for multistatic radar systems. In [
14], a localization method based on Taylor-series estimation is proposed. However, it cannot capture a close enough starting point and has large computational burden. Therefore, this method cannot be applied to multistatic SAR.
In addition, the accuracy of BRS estimation greatly influences the localization accuracy. The influence factor of BRS estimation error can be classified into two parts: (1) time of arrival (TOA) estimation error; (2) time synchronization error. In traditional multistatic radar systems, TOA estimation is a considerable challenge especially when the signal-to-noise ratio (SNR) is low. The multistatic SAR has a similar problem, which may affect the BRS estimation accuracy. In [
15,
16], TOA estimation algorithms are proposed to improve the estimation accuracy. As another main influence factor, time synchronization is also a big challenge for the application of the multistatic radar system, as well as multistatic SAR. Without time synchronization, BRS cannot be estimated accurately. The work in [
5] proposes time synchronization technology for distributed SAR, including bistatic and multistatic SAR. In [
17], a mathematical model considering the time synchronization error is given. Both [
5,
17] can observably reduce the time synchronization error between transmitters and receivers. Therefore, according to [
5,
17], the BRS estimation error in multistatic SAR is less than 5 m, because the maximum of time synchronization error is 15 ns.
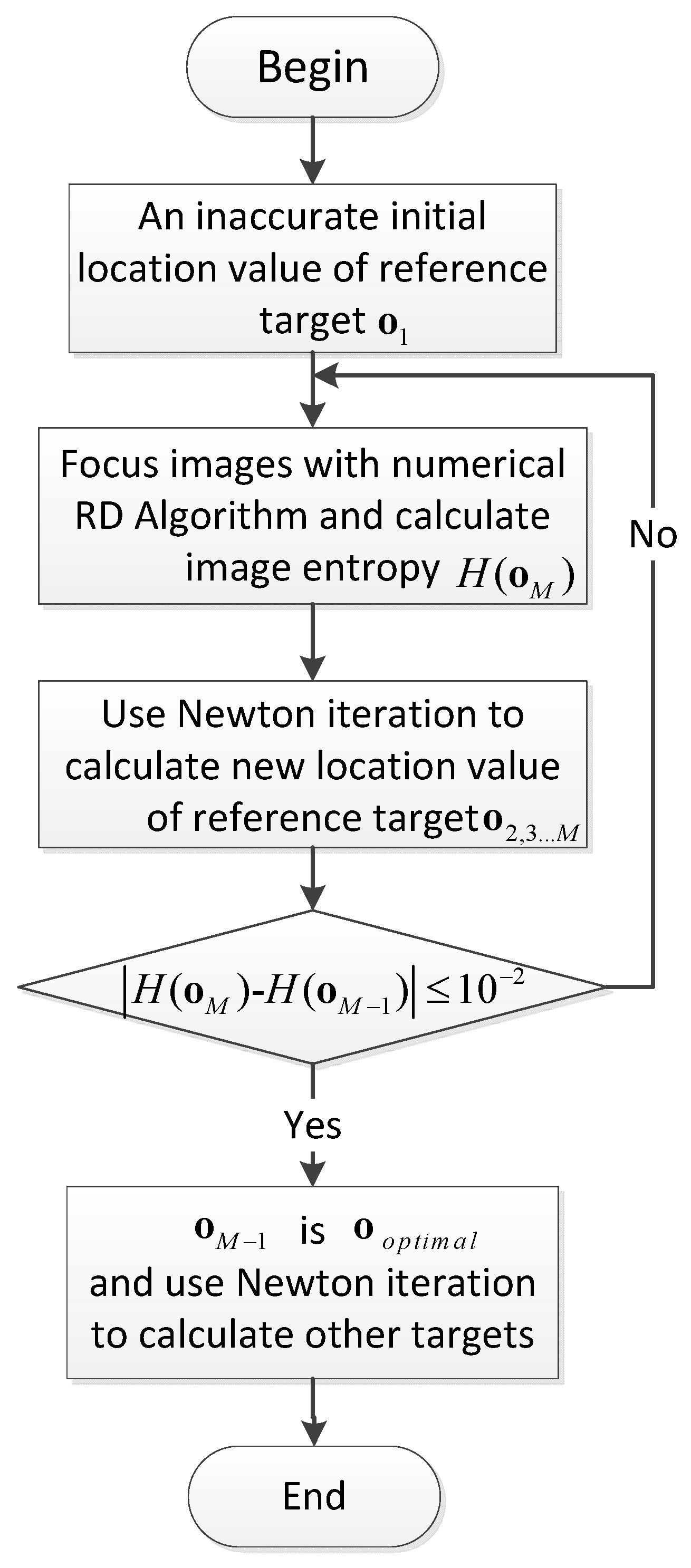
This paper describes a localization method for multistatic SAR. It can eliminate the influences of Doppler centroid estimation (DCE) errors and improve the localization accuracy. This method can be arranged into four steps: (1) the raw data from each T/R pair are focused by the numerical RD algorithm with the initial location value of the reference target; (2) Newton iteration is used to solve the target location value with the information of BRS in different SAR images with respect to different T/R pairs; (3) entropy is used to measure image quality and iterate imaging with the new location value of the reference target, until the entropy gets the minimum value; we can get the optimal location value of reference target; (4) all targets can be located by the Newton iteration method with their BRS in each T/R pair, which are obtained from the images with minimum entropy.
The fundament of the localization principle is presented in
Section 2. In
Section 3, simulation results are shown. Additionally, a comparison with other methods is shown in
Section 4. At last, the conclusion is shown in
Section 5.
3. Numerical Simulation
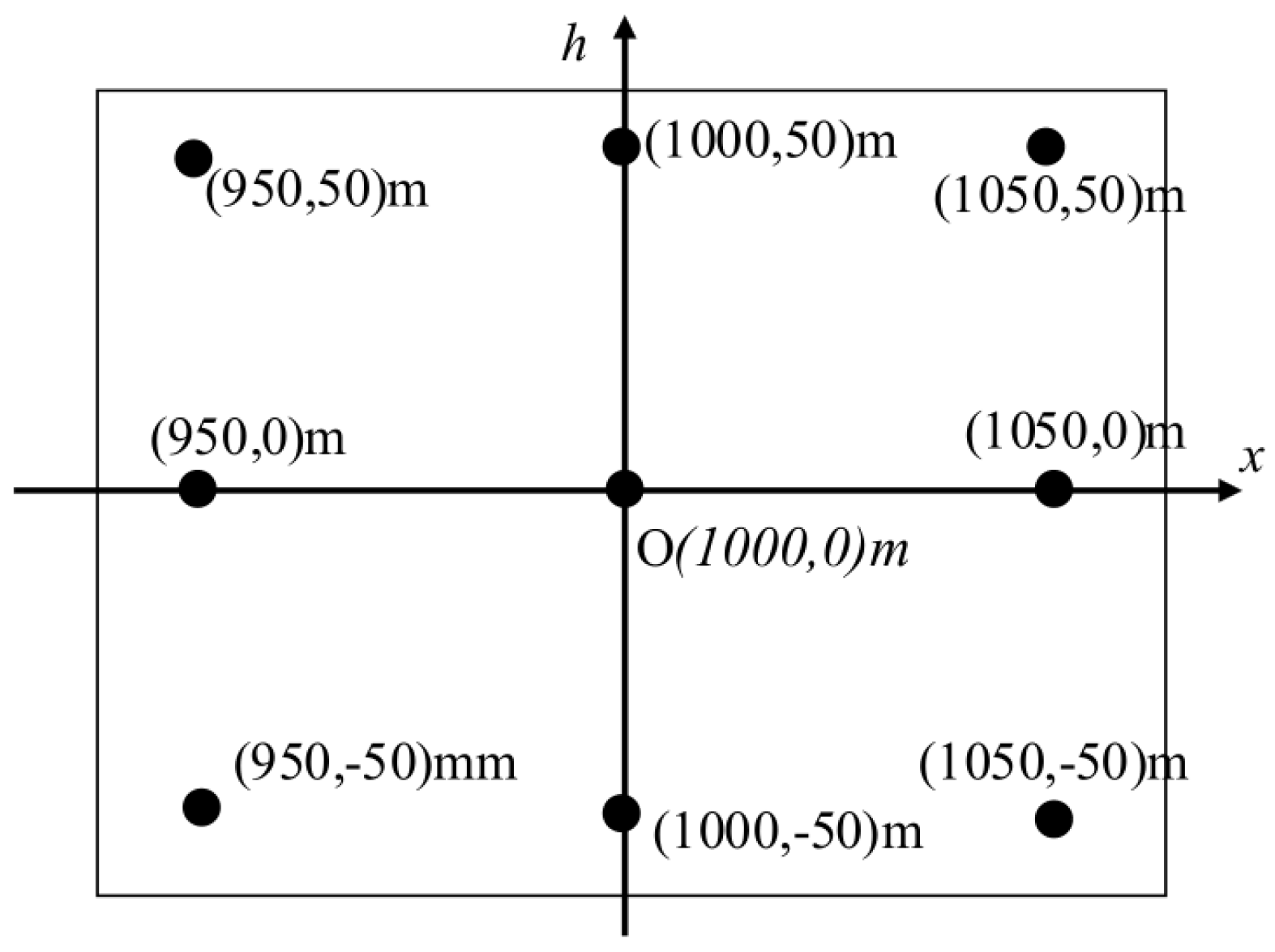
To verify the effectiveness of the proposed localization method based on the numerical RD algorithm and entropy minimization iteration, we carry out numerical simulations in this section. In the simulations, multistatic SAR is set to be one receiver and four transmitters. We set nine point targets, as shown in
Figure 10. They distribute in one plane vertical to the ground with the same
y axis value. This is to verify the capability of three-dimensional localization. The distances between two adjacent targets along the
x axis direction and
h axis direction are both 50 m. Target
O is the center target. The simulation parameters are listed in
Table 1.
3.1. Three-Dimensional Target Localization without Reference Target Location Error and Entropy Minimization Iteration
Firstly, we assume that the location of reference target
O is already known precisely before we perform the imaging and localization. Thus, the reference target location has no error. Therefore, we do not need to perform entropy minimization iteration. At the same time, the transmitters’ and receiver’s locations are precise, as well. Based on the proposed method, the localization results are shown in
Table 2. Additionally, the localization error is computed as the Euclidean distance between simulated and localized target points. We can find that the numerical RD imaging algorithm and Newton iteration are effective in the localization of multistatic SAR. The location errors of the other targets in
Table 2 come from the estimation errors of BRS in the focused SAR image.
3.2. Three-Dimensional Target Localization with Reference Target Location Error and Entropy Minimization Iteration
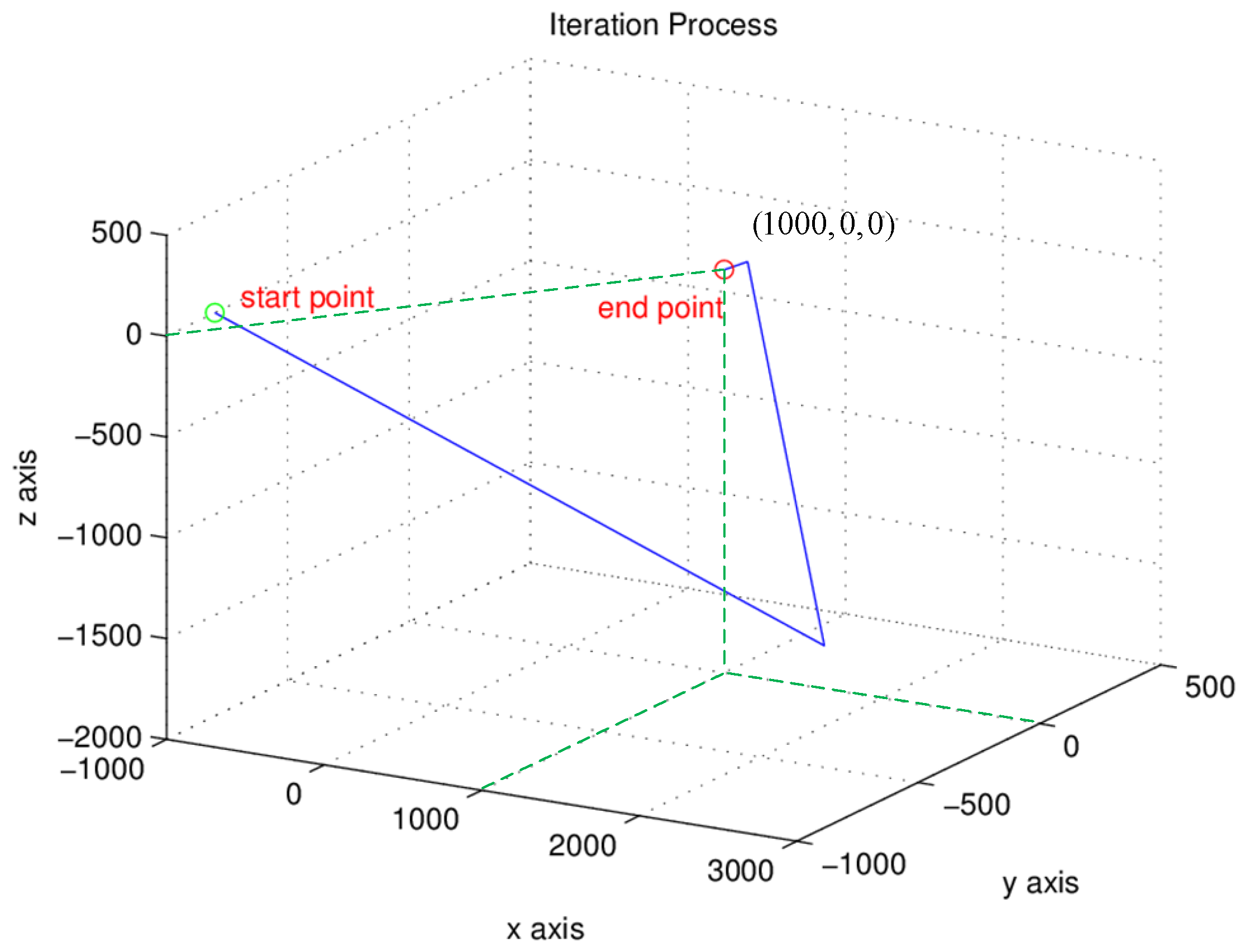
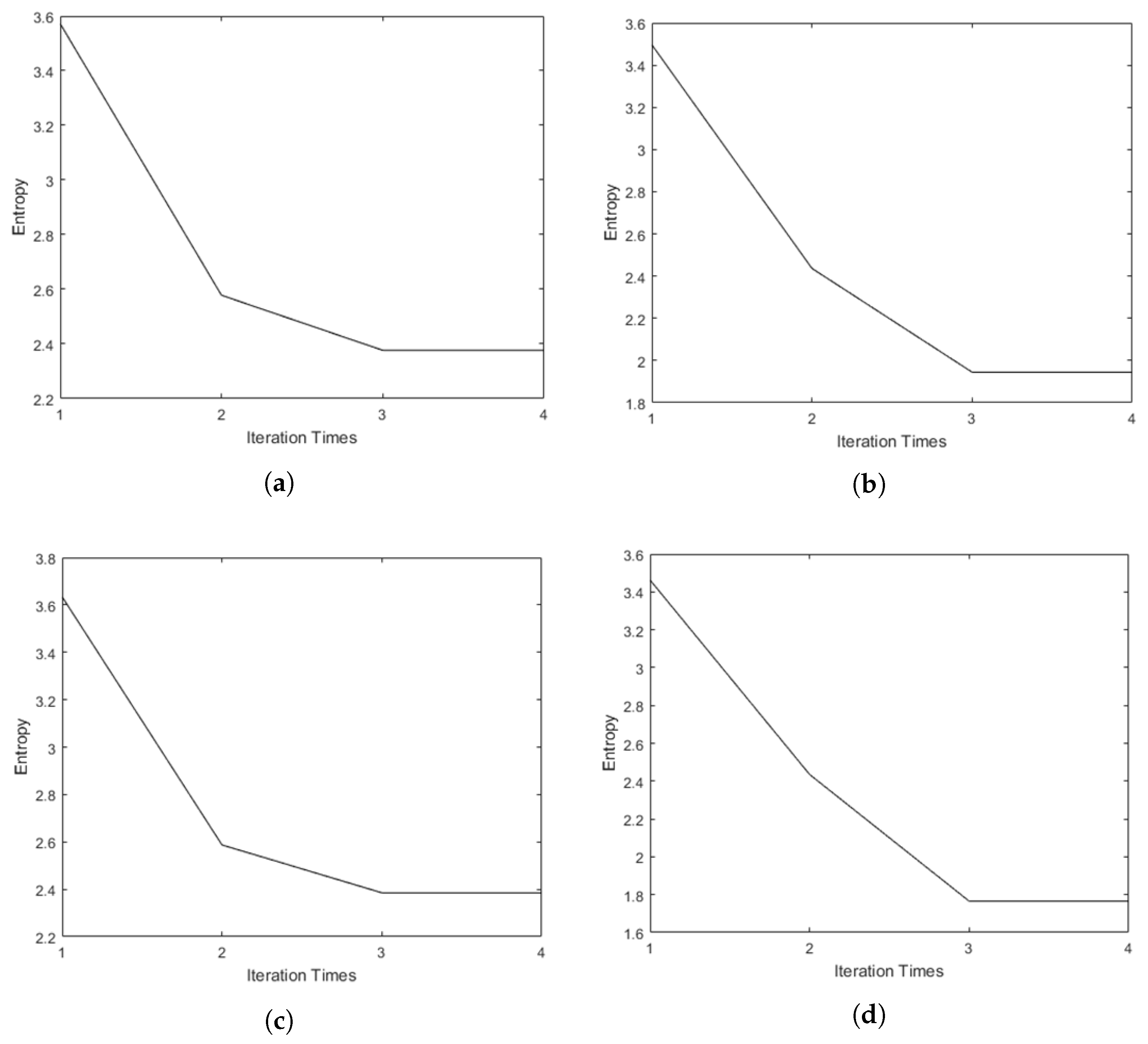
In this section, the location value of the reference target has a certain error. We use entropy minimization iteration to eliminate this error. The real position of the reference target is m, but the location value of the reference target that we can get is m.
Then, we use entropy minimization iteration to improve the location value of the reference target. After three times of iteration, we can find that the entropy in each T/R pair reaches the minimum. The entropy minimization iteration process is shown in
Figure 11.
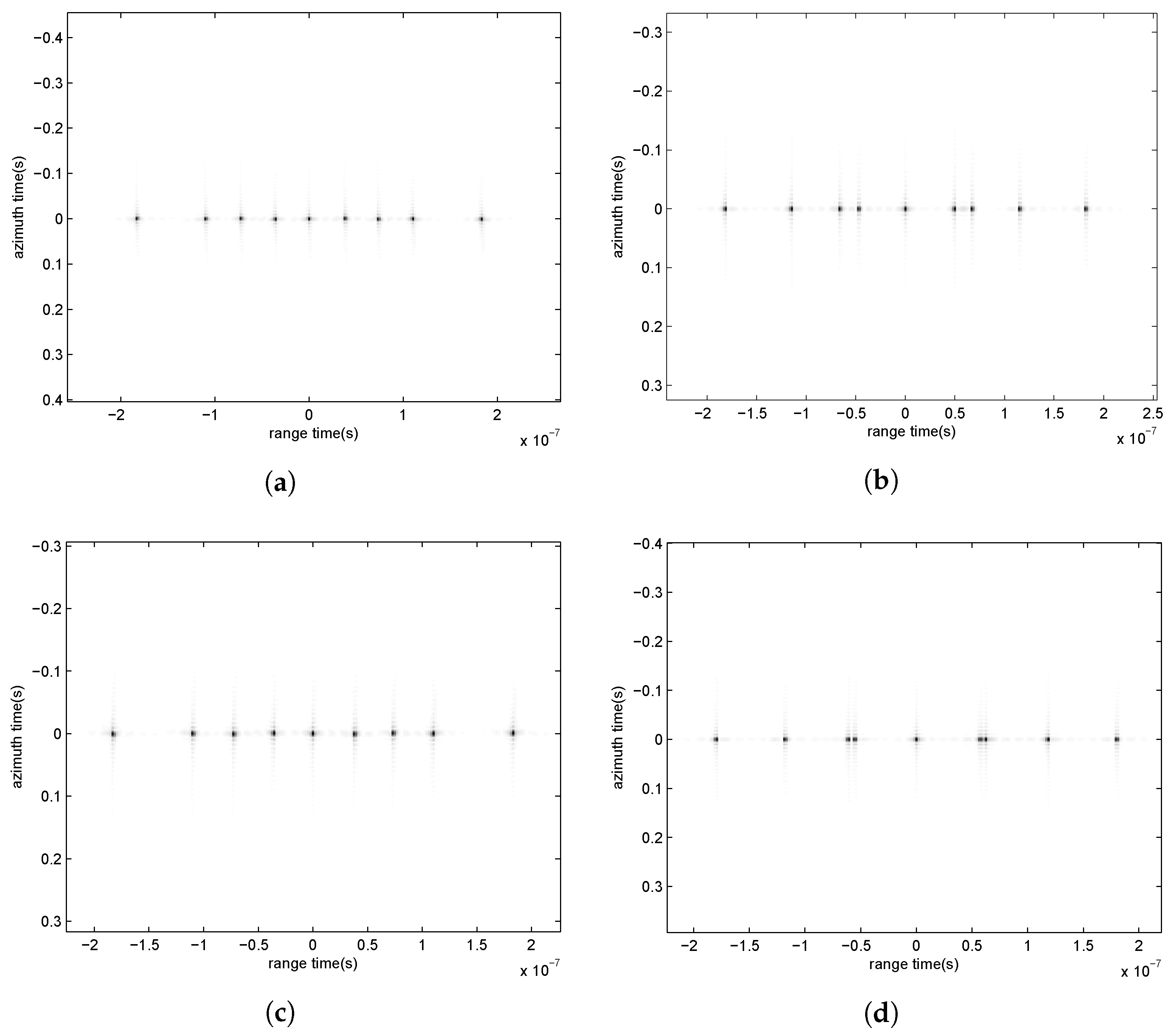
The raw data from every T/R pair are focused by the numerical RD algorithm with the reference target that is obtained from the three-time entropy minimization iteration. The focused images are shown in
Figure 12.
Based on the three-dimensional localization method, the localization result is listed in
Table 3.
Comparing with
Table 2, we can see that the reference target location error does not influence the localization accuracy with this method.
3.3. Three-Dimensional Target Localization with the Platforms’ Position Error
From Equation (
1), we know that the platforms’ position values have significant influences on the target localization of multistatic SAR. In addition, the platforms’ position values affect the imaging accuracy, as well. Here, we firstly assume that the error is small, where the position errors of the receiver, Transmitter 1, Transmitter 2, Transmitter 3 and Transmitter 4 are
m,
m,
m,
0.5025) m and
m, respectively. The localization results are shown in
Table 4.
When the platforms’ position has large error, the errors of the receiver, Transmitter 1, Transmitter 2, Transmitter 3 and Transmitter 4 are
m,
m,
m,
m and
m, respectively. The localization results are shown in
Table 5.
We can see that the platforms’ position error can influence the accuracy of target locations. Additionally, in
Table 4, we can find that the maximal location error is less than 10 m, and the minimal location error is less than 5 m with this method. In
Table 5, the location error is less than 17 m. Additionally, the three-dimensional localization method also can be applied to platforms’ with large error for some large targets like buildings and planes. Therefore, we can find that the localization error increases with the increase in the platforms’ position error.
3.4. Three-Dimensional Target Localization with the Platforms’ Velocity Error
The velocity error of the platforms is also important information for the proposed method, which can cause BRS estimation error.
The velocity errors of the receiver, Transmitter 1, Transmitter 2, Transmitter 3 and Transmitter 4 are 0.8213
m/
s, −0.2004
m/
s, −0.4803
m/
s, 0.6001
m/
s and −0.1372
m/
s. The localization results are shown in
Table 6. Additionally, we can see that the location position of the reference target has no error, and the maximal location error is less than 3.5 m with this method.
4. Discussion and Comparison
As a contrast, the localization result proposed in [
11,
12] with the same parameters in
Table 1 is listed in
Table 7. Since it is monostatic SAR, the location and velocity of the first transmitter parameter are used here. Additionally, in
Table 8, we set the same targets without height information in our proposed method. We can find that the two methods can be applied to targets without height information, and localization error is less with the three-dimensional localization method. In addition, we set targets with height information, which is shown in
Figure 10. The localization result proposed in [
11,
12] is shown in
Table 9. It is clear in
Table 9 that localization error is too large, and this method cannot be applied to obtain the target height information.
According to
Table 2,
Table 3,
Table 4,
Table 5 and
Table 6, it can be concluded that the proposed localization method has a higher quality of accuracy and can obtain targets’ height information compared with that proposed in [
11,
12].
5. Conclusions
A localization method for multistatic SAR is proposed in this paper. It is based on the numerical RD algorithm and entropy minimization iteration. Numerical RD processing is used to focus the raw data of different transmitter and receiver pairs in multistatic SAR. However, in the focusing, the location value of the reference target is preset before we finish the target localization. Then, Newton iteration is used to obtain the three-dimensional coarse location values of the reference target. After that, to improve the localization accuracy, image entropy minimization iteration is carried out. In every iteration, the location values are updated until the image entropy obtains the minimum, which means the image is focused very well and the location value is precise. Finally, other targets’ location values are obtained from the BRS information. Therefore, the proposed algorithm can improve the localization accuracy and achieve three-dimensional localization.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}