1. Introduction
Surface soil moisture is generally the water content within the upper 10 cm of soil. Although such water is a very small portion of the global water content, it is fundamentally important to many hydrological, biochemical, biological, agricultural and other processes [
1]. Many applications also involve surface soil moisture as a key variable, including construction engineering [
2], meteorology [
3], climate change monitoring [
4,
5], environmental science [
6,
7,
8] and agricultural modeling [
9]. Due to these facts, it is important to monitor soil moisture conditions, especially to obtain spatial and temporal variations in soil moisture.
To acquire as many soil moisture observations as possible with as high a quality as possible, much effort has been applied. On the ground, the international soil moisture network (ISMN) provides a worldwide network of soil moisture in situ observatories [
10]. Their discrete observations measure soil moisture only at specific locations and are thus inadequate to represent the soil moisture spatial distribution, although they provide temporally continuous observations. In addition, techniques for measuring soil moisture across a wide area have been developed since the mid–1970s, when a surge in satellite development began. With the development of optical remote sensors onboard satellite missions, more and more optical remote sensing products have been able to provide soil moisture retrieval possibilities. In recent decades, microwave remote sensing has also encountered significant development [
11,
12,
13,
14,
15]. Specifically, many remote sensing missions have been utilized for soil moisture retrieval. One of the most recent projects is the SMAP-soil moisture active passive mission, which is driven by JPL NASA [
16]. Other projects include the moderate resolution imaging spectroradiometer (MODIS) and the Advanced Microwave Scanning Radiometer—EOS (AMSR-E) onboard Aqua [
17,
18], the Soil Moisture and Ocean Salinity (SMOS) mission driven by the ESA [
19].
However, soil moisture remote sensing with microwave techniques is highly dependent on environmental factors such as soil surface roughness [
20] and land cover heterogeneity [
21]. Although L–band microwave soil moisture products can partially overcome the influence of dense vegetation, optical remote sensing has its advantages in exemption from complicated polarization information exploration or exhaustive field observations on soil surface roughness. Thus, many soil moisture remote sensing achievements have been made on optical soil moisture remote sensing [
22,
23,
24,
25,
26]. Nevertheless, clouds, thick fogs, mists, darkness, absence of revisiting and many other factors have prevented optical sensors from operating over a required location at the required moment. Although optical remote sensing imaging techniques have achieved massive archives throughout their long history, spatiotemporal gaps of soil moisture observations inevitably exist.
To overcome the incompleteness of soil moisture or other remote sensing results, much elaborative effort has been made. Existing methods can be divided into three categories: (1) methods that fill gaps using spatial information; (2) methods that fill gaps by temporal information; and (3) methods that fill gaps by integrating both spatial and temporal information. In the gap–filling process, some methods also make use of ancillary data sources, such as other remote sensing images, a digital elevation model, or land use state information. Representatives of these categories are listed below.
Table 1 gives a summary of the state-of-the-art approaches as well as their shortcomings, while detailed comments are farther below.
The first category of methods for filling gaps uses spatial information. Considering the fact that spatially close geospatial features usually appear to be related or similar, geostatistical approaches such as the Kriging method have been widely used in filling gaps of remote sensing images using the information provided by available pixels or auxiliary data around the gaps [
27,
28]. When another data frame without gaps is available, the co-Kriging method becomes useful to address the extra observations made by the same sensor at the same site on another date to fill gaps in remote sensing images [
29,
30]. In that case, image segmentations can also be gap-filling units [
31,
32,
33]. Chen et al. [
34] also proposed a method that uses data from an alternative date, which is a novel Neighborhood Similar Pixel Interpolator method, to fill gaps for Landsat ETM+ SLC failures. This method was later improved by Zhu et al. [
35] using a geostatistical technique.
The second category of methods for filling gaps uses information in time series, specifically the pixel values acquired at moments other than at the gap to be filled. Kandasamy et al. [
45] provided an informative review of these temporal methods. Jönsson and Eklundh [
36] developed the TIMESAT software package, recovering image gaps by asymmetric Gaussian and Savitzky-Golay filters and smoothing time-series data. Other gap-filling approaches using temporal information include the gap filling on the MODIS Leaf Area Index (LAI) data [
37] and AVHRR NDVI data [
38]. Later, Verger et al. [
39] developed a Consistent Adjustment of the Climatology to Actual Observations approach for increasing the accuracy of temporal interpolations of missing AVHRR LAI data, by utilizing climatological data within the model.
Other than those who utilize either temporal or spatial information for gap filling, there exist several spatiotemporal gap-filling approaches that solve this problem by a combination of temporal and spatial steps. Running et al. [
40] provided a method for filling gaps in ecosystem metrics, which include FPAR, LAI, and net photosynthesis. This method on the one hand uses simple spatial interpolation within the same land cover classes. On the other hand, if no cloud-free pixels are available in the neighborhood window of a gap pixel, this method takes temporal interpolation using earlier or later observations. Later, Borak and Jasinski [
41] modified this approach to fill gaps on MODIS LAI images over a large portion of North America. Unlike Running et al. [
40], Gafurov and Bárdossy [
42] developed another algorithm that executes temporal models prior to spatial models. Later, Poggio et al. [
43] developed an innovative method for gap-filling MODIS EVI data that utilizes a hybrid Generalized Additive Model (GAM). This geostatistical model uses spatial and temporal information simultaneously.
Overall, the present spatial approaches for filling gaps of remote sensing indices assume access to neighborhood information at the same time, but optical sensors can be totally blocked by heavy fog or thick clouds, which leads to poor spatial information in a single frame of image. In other cases, spaceborne remote sensors without geosynchronous characters could have revisit gaps. These two reasons degrade the capability of such methods. On the other hand, temporal changes of natural variations of environmental metrics might have various characteristics, making the temporal models of other remote sensing metrics incapable of recovering soil moisture.
In [
44], a novel method SICR algorithm was proposed to recover soil moisture remote sensing under complete cloud contamination with the help of in situ observations. This innovation study proposed a solution for reconstructing regional soil moisture distributions under complete contamination of a target area in which the optical remote sensors are totally invalid. The SICR algorithm extracts recovery models from historical remotely sensed soil moisture images of the same region, together with contemporary in situ soil moisture observation series by a number of observatories located in this target region.
In this method, linear models were widely utilized. Nevertheless, the relationship between natural factors and remote sensing metrics is not always linear. Moreover, different sensing techniques represent soil moisture at different spatial scales, which are not always linearly related. Therefore, linear models are not adequate for projecting the recovered relationships, and more sophisticated models could be involved.
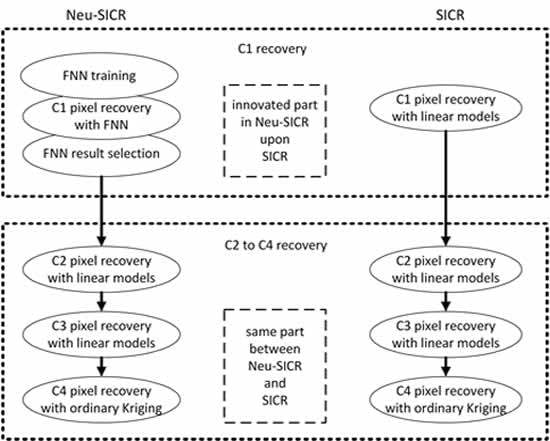
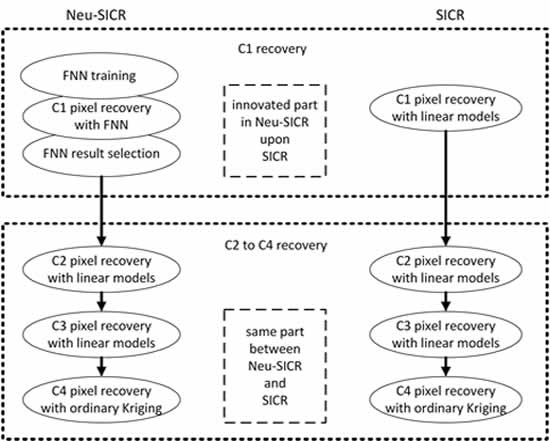
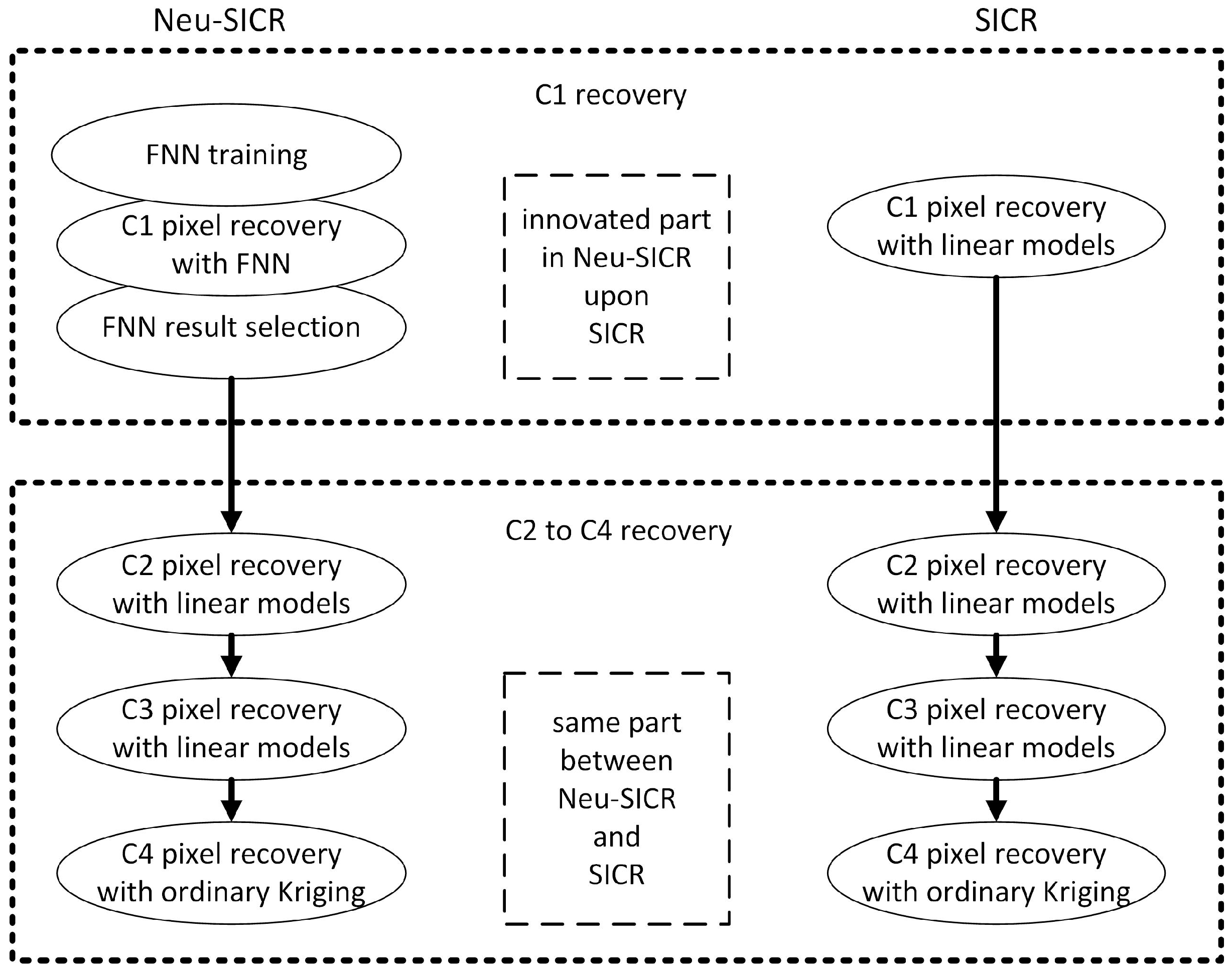
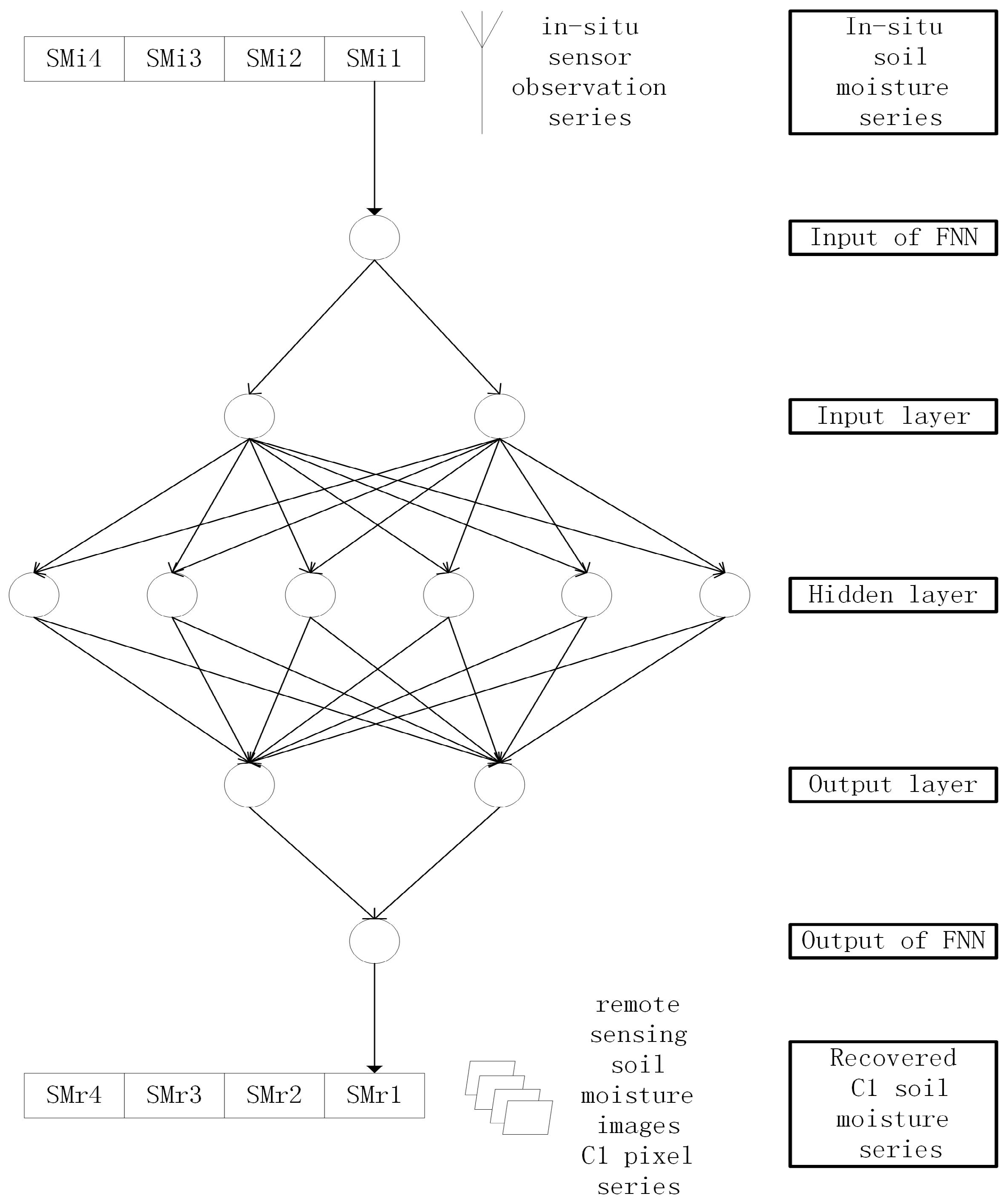
To overcome the aforementioned shortcomings and disadvantages, this paper presents a substitute to one of the recovery models in the SICR method, aiming to improve the recovering accuracy by modeling the projection relationship from in situ soil moisture to remotely sensed soil moisture more accurately. To our knowledge, it is the first approach that utilizes neural network and machine learning techniques for recovering remote sensing soil moisture images while combining spaceborne and in situ data. This approach has improved remotely sensed soil moisture image recovery quality in terms of both accuracy and precision. Benefiting from the flexibility of artificial neural networks as the projecting model, the method is thus named the Neu-SICR algorithm.
The remainder of this paper is arranged as follows.
Section 2 offers an overview of the Neu-SICR algorithm. The problem assumptions and the major innovation in this algorithm are illustrated.
Section 3 expands the algorithm verification experiment and its results.
Section 4 examines the results and compares the recovery quality of this method with that of conventional methods.
Section 5 gives the conclusion of this article and provides an outlook for future research topics on this method.
6. Conclusions
In this paper, we proposed a novel improvement on the SICR algorithm for recovering remote sensing soil moisture images, with the help of in situ soil moisture observations. The Neu-SICR algorithm structure has been adopted from the SICR algorithm, and the foremost recovery model has been improved with artificial neural networks. The algorithm has been verified, the results have been examined, and comparisons to the original SICR algorithm have proven better reconstruction quality and similar temporal efficiency achieved by the Neu-SICR algorithm.
While conventional reconstruction algorithms rely on partial accessibility of remote sensing data, the Neu-SICR provides the possibilities for harsher situations where full remote sensing images at the target moment are beyond access, and it fuses spaceborne optical remote sensing data with ground based in situ soil moisture observations, realizing regional soil moisture reconstruction in a multi-source data fusion manner. Moreover, the Neu-SICR algorithm, as an upgrade of SICR, utilizes machine learning mechanisms to project in situ soil moisture observations at the meter level scale toward remote sensing soil moisture at the tens of meters’ scale. This manner benefits from extraordinary flexibility of artificial neural network in representing complex correlations between soil moisture at different scales and thus results in higher reconstruction quality than the SICR algorithm.
Further improvements could still be made to the recovery process, including the following: (1) By selecting other optical remote sensing data sources for model training, more abundant training pairs and consequently a better C1 recovery model can be expected; (2) By selecting other remote sensing techniques, such as microwave remote sensing soil moisture data, higher remote sensing soil moisture data quality could contribute to higher recovery quality; (3) By selecting other models projecting C1 pixel values to C2 pixel values and by choosing periodic functions that represent seasonal variation of C3 values, such as the dynamic harmonic regression model, higher recovery quality of C2 and C3 pixels could be expected when historical records are adequate to train these models.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}