
Semi-Automated Monitoring of a Mega-Scale Beach Nourishment Using High-Resolution TerraSAR-X Satellite Data

 ,
,  ,
,  and
and
Abstract
:
1. Introduction
2. Materials and Methods
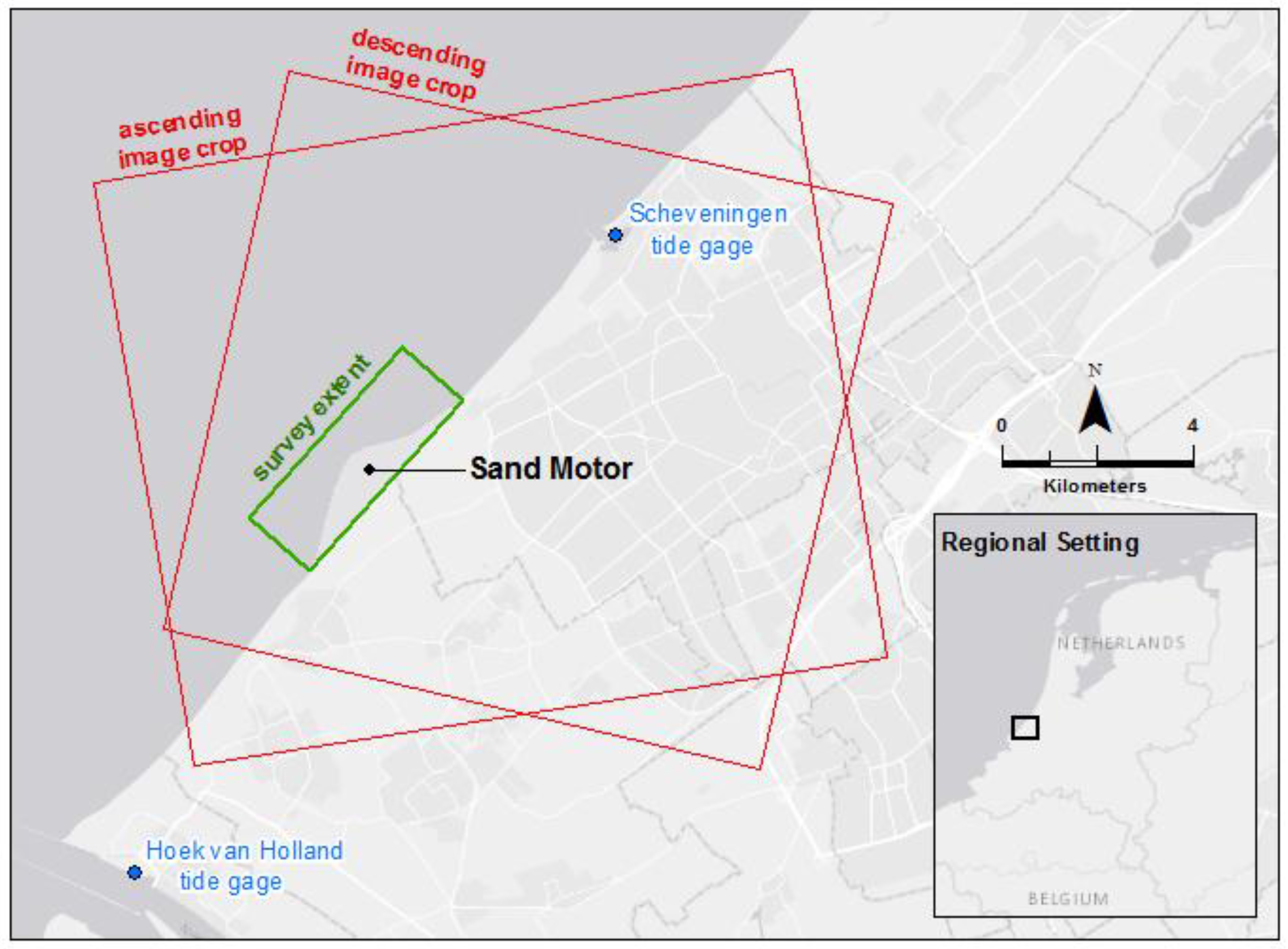
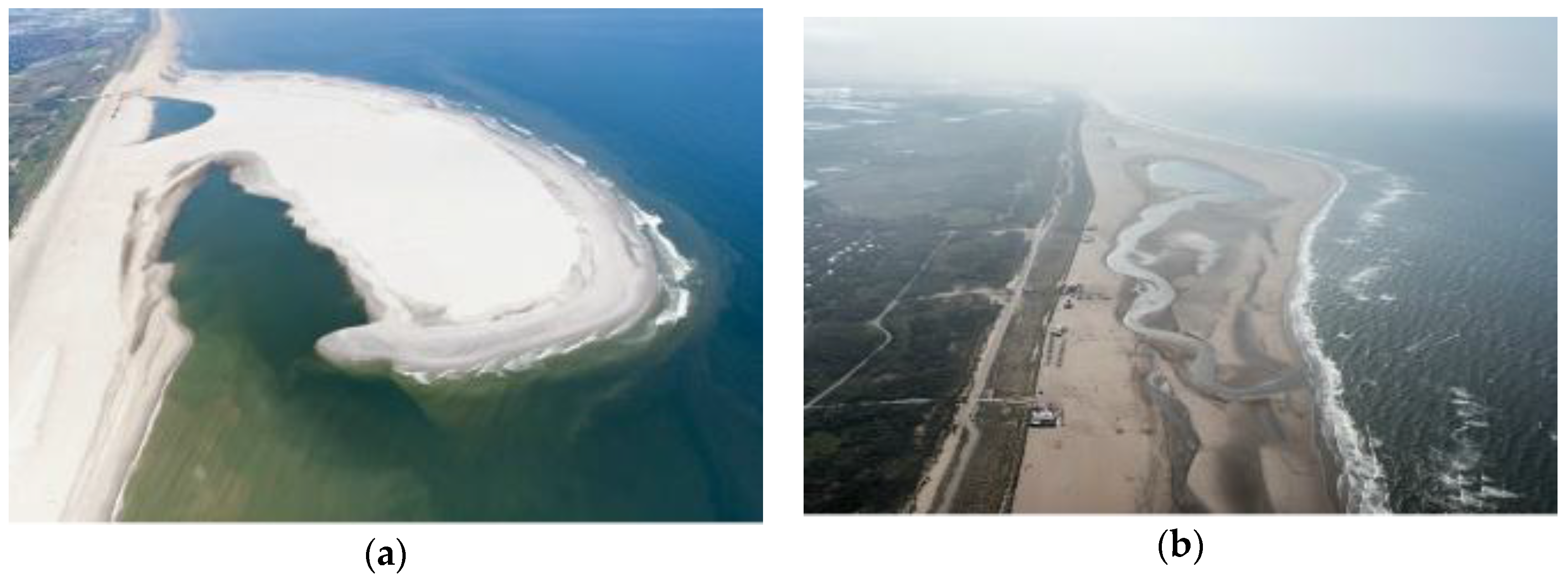
2.1. Study Area: The Sand Motor
2.2. Input Data
2.2.1. TerraSAR-X Satellite Images
2.2.2. Topographic Surveys
2.2.3. Environmental Conditions
2.3. Methods
2.3.1. Pre-Processing SAR Images
2.3.2. Classification: Distinguishing between Land and Water Pixels
2.3.3. Shoreline Extraction from Classified Image
2.3.4. Shoreline Georeferencing
2.3.5. Validation Using In-Situ Data
3. Results
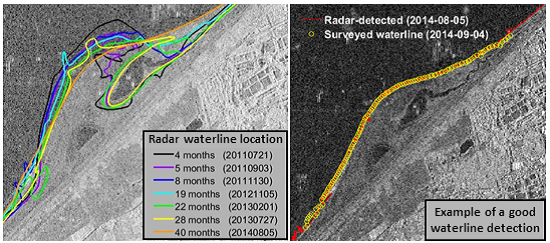
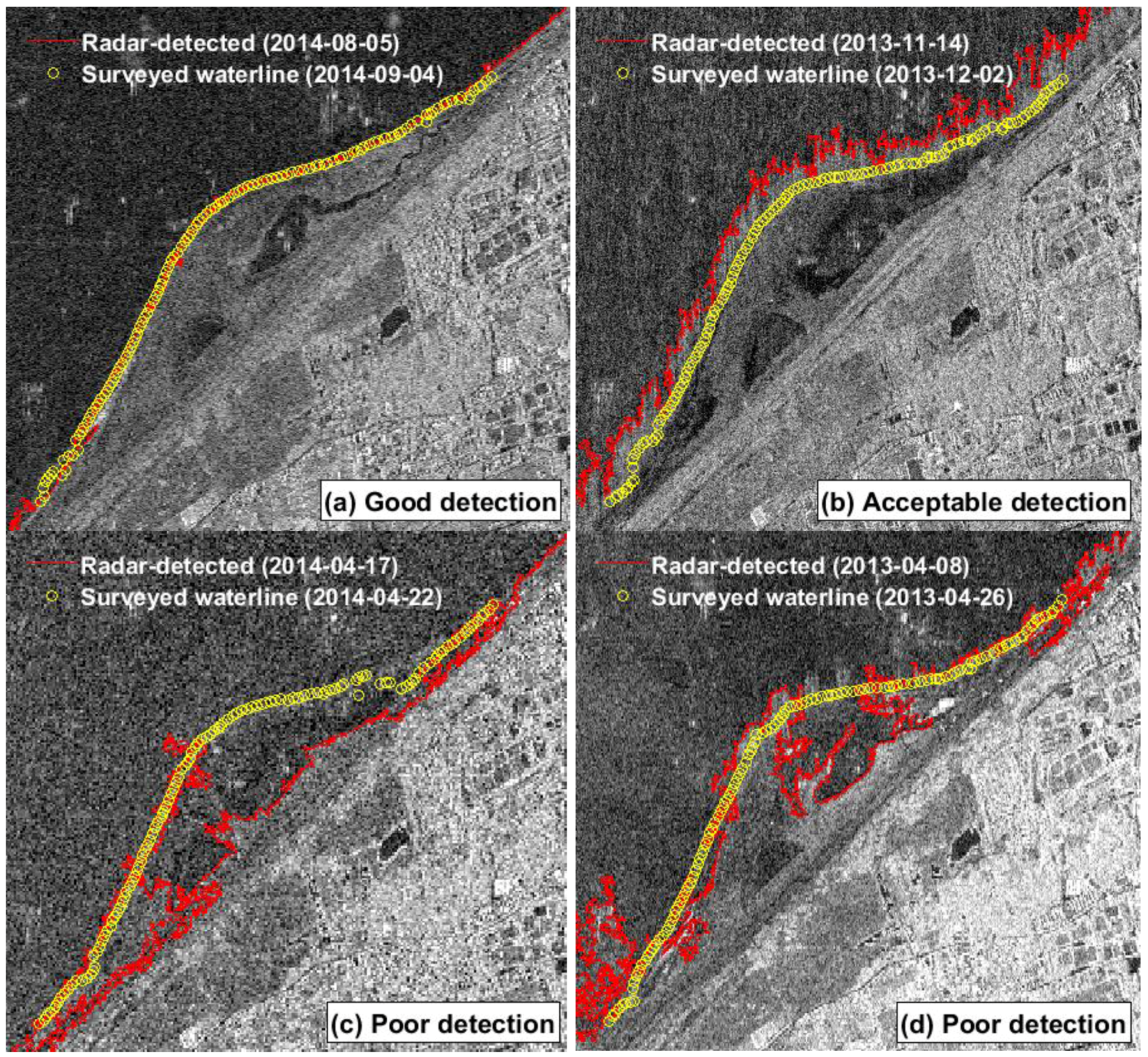
3.1. Qualitative Inspection of TerraSAR-X Derived Shorelines
3.2. Horizontal Error of Shoreline Estimates
3.3. Ascending versus Descending Image Results
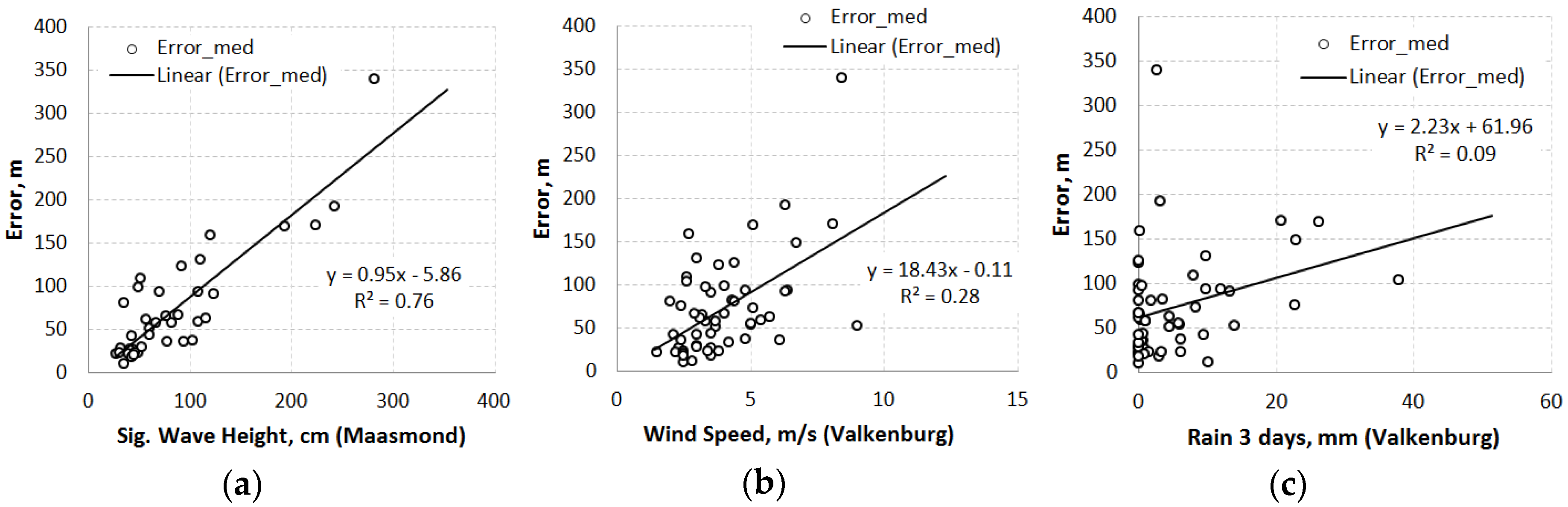
3.4. Influence of Environmental Conditions on Shoreline Accuracy
4. Discussion
4.1. Applications of Shorelines from TerraSAR-X Images
4.2. Availability of SAR Imagery
4.3. Method Improvement
4.4. Comparison to Extracted Shorelines of Others
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gens, R. Remote sensing of coastlines: Detection, extraction and monitoring. Int. J. Remote Sens. 2010, 31, 1819–1836. [Google Scholar] [CrossRef]
- Kroon, A.; Davidson, M.A.; Aarninkhof, S.G.J.; Archetti, R.; Armaroli, C.; Gonzalez, M.; Medri, S.; Osorio, A.; Aagaard, T.; Holman, R.A.; et al. Application of remote sensing video systems to coastline management problems. Coast. Eng. 2007, 54, 493–505. [Google Scholar] [CrossRef]
- Boak, E.H.; Turner, I.L. Shoreline definition and detection: A review. J. Coast. Res. 2005, 21, 688–703. [Google Scholar] [CrossRef]
- Holman, R.A.; Stanley, J. The history and technical capabilities of Argus. Coast. Eng. 2007, 54, 477–491. [Google Scholar] [CrossRef]
- Armaroli, C.; Ciavola, P.; Balouin, Y.; Gatti, M. An integrated study of shoreline variability using GIS and ARGUS techniques. J. Coast. Res. 2004, 39, 34–52. [Google Scholar]
- Elko, N.A.; Holman, R.A.; Gelfenbaum, G. Quantifying the rapid evolution of a nourishment project with video imagery. J. Coast. Res. 2005, 21, 633–645. [Google Scholar] [CrossRef]
- Harley, M.D.; Andriolo, U.; Armaroli, C.; Ciavola, P. Shoreline rotation and response to nourishment of a gravel embayed beach using a low-cost video monitoring technique: San Michele-Sassi Neri, Central Italy. J. Coast. Conserv. 2014, 18, 551–565. [Google Scholar] [CrossRef]
- Klemas, V. Airborne remote sensing of coastal features and processes: An overview. J. Coast. Res. 2012, 29, 239–255. [Google Scholar] [CrossRef]
- Klemas, V. Coastal and Environmental Remote Sensing from Unmanned Aerial Vehicles: An Overview. J. Coast. Res. 2015, 31, 1260–1267. [Google Scholar] [CrossRef]
- Mills, J.P.; Buckley, S.J.; Mitchell, H.L.; Clarke, P.J.; Edwards, S.J. A geomatics data integration technique for coastal change monitoring. Earth Surf. Process. Landf. 2005, 30, 651–664. [Google Scholar] [CrossRef]
- Lindenbergh, R.C.; Hanssen, R. Eolian deformation detection and modeling using airborne laser altimetry. In Proceedings of the 2003 IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–15 July 2003; pp. 1–4. [Google Scholar]
- Gares, P.A.; Wang, Y.; White, S.A. Using LIDAR to monitor a beach nourishment project at Wrightsville Beach, North Carolina, USA. J. Coast. Res. 2006, 22, 1206–1219. [Google Scholar] [CrossRef]
- Stockdon, H.F.; Sallenger, A.H., Jr.; List, J.H.; Holman, R.A. Estimation of shoreline position and change using airborne topographic lidar data. J. Coast. Res. 2002, 19, 502–513. [Google Scholar]
- Smeeckaert, J.; Mallet, C.; David, N.; Chehata, N.; Ferraz, A. Large-scale classification of water areas using airborne topographic lidar data. Remote Sens. Environ. 2013, 138, 134–148. [Google Scholar] [CrossRef]
- Ryu, J.H.; Won, J.S.; Min, K.D. Waterline extraction from Landsat TM data in a tidal flat: A case study in Gomso Bay, Korea. Remote Sens. Environ. 2002, 83, 442–456. [Google Scholar] [CrossRef]
- Pardo-Pascual, J.E.; Almonacid-Caballer, P.; Ruiz, L.A.; Palomar-Vázquez, J. Automatic extraction of shorelines from Landsat TM and ETM+ multi-temporal images with subpixel precision. Remote Sens. Environ. 2012, 123, 1–11. [Google Scholar] [CrossRef]
- Maiti, S.; Bhattacharya, A.K. Shoreline change analysis and its application to prediction: A remote sensing and statistics based approach. Mar. Geol. 2009, 257, 11–23. [Google Scholar] [CrossRef]
- Guariglia, A.; Buonamassa, A.; Losurdo, A.; Saladino, R.; Trivigno, M.L.; Zaccagnino, A.; Colangelo, A. A multisource approach for coastline mapping and identification of shoreline changes. Ann. Geophys. 2006, 49, 295–304. [Google Scholar]
- Horritt, M.S.; Mason, D.C.; Luckman, A.J. Flood boundary delineation from synthetic aperture radar imagery using a statistical active contour model. Int. J. Remote Sens. 2001, 22, 2489–2507. [Google Scholar] [CrossRef]
- Strozzi, T.; Wiesmann, A.; Kääb, A.; Joshi, S.; Mool, P. Glacial lake mapping with very high resolution satellite SAR data. Nat. Hazards Earth Syst. Sci. 2012, 12, 2487. [Google Scholar] [CrossRef]
- Lee, J.S.; Jurkevich, I. Coastline detection and tracing in SAR images. IEEE Trans. Geosci. Remote Sens. 1990, 28, 662–668. [Google Scholar]
- Li, Z.; Heygster, G.; Notholt, J. Intertidal topographic maps and morphological changes in the German Wadden Sea between 1996–1999 and 2006–2009 from the waterline method and SAR images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3210–3224. [Google Scholar] [CrossRef]
- Martinis, S.; Twele, A.; Voigt, S. Towards operational near real-time flood detection using a split-based automatic thresholding procedure on high resolution TerraSAR-X data. Nat. Hazards Earth Syst. Sci. 2009, 9, 303–314. [Google Scholar] [CrossRef]
- Martinis, S.; Twele, A. A hierarchical spatio-temporal Markov model for improved flood mapping using multi-temporal X-band SAR data. Remote Sens. 2010, 2, 2240–2258. [Google Scholar] [CrossRef]
- Krijger, J.M.; Weele, M.V.; Aben, I.; Frey, R. Technical Note: The effect of sensor resolution on the number of cloud-free observations from space. Atmos. Chem. Phys. 2007, 7, 2881–2891. [Google Scholar] [CrossRef]
- Heygster, G.; Dannenberg, J.; Notholt, J. Topographic mapping of the German tidal flats analyzing SAR images with the waterline method. IEEE Trans. Geosci. Remote Sens. 2009, 48, 1019–1030. [Google Scholar] [CrossRef]
- Mason, D.C.; Davenport, I.J.; Flather, R.A.; Gurney, C.; Robinson, G.J.; Smith, J.A. A sensitivity analysis of the waterline method of constructing a digital elevation model for intertidal areas in ERS SAR scene of Eastern England. Estuar. Coast. Shelf Sci. 2001, 53, 759–778. [Google Scholar] [CrossRef]
- Kim, D.J.; Moon, W.M.; Park, S.E.; Kim, J.E.; Lee, H.S. Dependence of waterline mapping on radar frequency used for SAR images in intertidal areas. IEEE Geosci. Remote Sens. Lett. 2007, 4, 269–273. [Google Scholar] [CrossRef]
- Rijkswaterstaat. Land/Water Detection with Polarimetric SAR; Rijkswaterstaat rapportnr; AGI-2006-GAB-027; Rijkswaterstaat Adviesdienst Geo-informatie en ICT: Delft, The Netherlands, 2006. [Google Scholar]
- Robinson, D.A.G.; Bijker, W.; Tolpekin, V.A. Shoreline Detection Using TerraSAR-X Quad Polarization Mode. Int. Hydrogr. Rev. 2015, 10, 15–25. [Google Scholar]
- Short, A.D. Beach systems of the central Netherlands coast: Processes, morphology and structural impacts in a storm driven multi-bar system. Mar. Geosci. 1992, 107, 103–137. [Google Scholar] [CrossRef]
- Wijnberg, K.M. Environmental controls on decadal morphologic behaviour of the Holland coast. Mar. Geosci. 2002, 189, 227–247. [Google Scholar] [CrossRef]
- Stive, M.J.F.; de Schipper, M.A.; Luijendijk, A.P.; Aarninkhof, S.G.J.; van Gelder-Maas, C.; van Thiel de Vries, J.S.M.; de Vries, S.; Henriquez, M.; Marx, S.; Ranasinghe, R. A new alternative to saving our beaches from local sea-level rise: The Sand Engine. J. Coast. Res. 2013, 29, 1001–1008. [Google Scholar] [CrossRef]
- De Schipper, M.A.; de Vries, S.; Ruessink, B.G.; De Zeeuw, R.C.; Rutten, J.; van Gelder-Maas, C.; Stive, M.J.F. Initial spreading of a mega feeder nourishment: Observations from the Sand Engine pilot project. Coast. Eng. 2016, 111, 23–38. [Google Scholar] [CrossRef]
- Kampes, B.M.; Hanssen, R.F.; Perski, Z. Radar interferometry with public domain tools. In Proceedings of the Third International Workshop on ERS SAR Interferometry, ‘FRINGE03’, Frascati, Italy, 1–5 December 2003. [Google Scholar]
- Ketelaar, V.B.H. Satellite Radar Interferometry: Subsidence Monitoring Techniques, 1st ed.; Springer: Dordrecht, The Netherlands, 2009. [Google Scholar]
- Qui, F.; Berglund, J.; Jensen, J.R.; Thakkar, P.; Ren, D. Speckle noise reduction in SAR imagery using a local adaptive median filter. GISci Remote Sens. 2004, 41, 244–266. [Google Scholar]
- Patidar, P.; Gupta, M.; Srivastava, S.; Nagawat, A.K. Image de-noising by various filters for different noise. Int. J. Comput. Appl. 2010, 9, 45–50. [Google Scholar] [CrossRef]
- Jain, A.K. Data clustering: 50 years beyond K-means. Pattern Recogn. Lett. 2010, 31, 651–666. [Google Scholar] [CrossRef]
- MacQueen, J. Some methods for classification and analysis of multivariate observations. In Proceedings of the Fifth Berkeley Symposium on Mathematical Statistics and Probability Volume 1: Statistics, Berkeley, CA, USA, 21 June–18 July 1967. [Google Scholar]
- Brown, L. A Survey of Image Registration Techniques. ACM Comput. Surv. 1992, 24, 325–376. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Volume 1, Microwave Remote Sensing Fundamentals and Radiometry. In Microwave Remote Sensing Active and Passive; Artech House: Norwood, UK, 1982. [Google Scholar]
- Bosboom, J.; Stive, M. Coastal Dynamics 1; Delft Academic Press: Delft, The Netherlands, 2015. [Google Scholar]
- Massonnet, D.; Souyris, J.-C. Imaging with Synthetic Aperture Radar; EPFL Press: Lausanne, Switzerland, 2008. [Google Scholar]
- Raney, R.K. Synthetic Aperture Imaging Radar and Moving Targets. IEEE Trans. Aerosp. Electron. Syst. 1971, 7, 499–505. [Google Scholar] [CrossRef]
- Vikebø, F.; Furevik, T.; Furnes, G.; Kvamstø, N.G.; Reistad, M. Wave height variations in the North Sea and on the Norwegian Continental Shelf, 1881–1999. Cont. Shelf Res. 2003, 23, 251–263. [Google Scholar] [CrossRef]
- Coleman, J.M. Dynamic changes and processes in the Mississippi River delta. Geol. Soc. Am. Bull. 1988, 100, 999–1015. [Google Scholar] [CrossRef]
- Hsu, J.R.; Uda, T.; Silvester, R. Beaches downcoast of harbours in bays. Coast. Eng. 1993, 19, 163–181. [Google Scholar] [CrossRef]
- Dan, S.; Walstra, D.J.R.; Stive, M.J.; Panin, N. Processes controlling the development of a river mouth spit. Mar. Geol. 2011, 280, 116–129. [Google Scholar] [CrossRef]
- Mahapatra, P.S.; Samiei-Esfahany, S.; van der Marel, H.; Hanssen, R.F. On the Use of Transponders as Coherent Radar Targets for SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1869–1878. [Google Scholar] [CrossRef]
- Burghardt, D. Controlled Line Smoothing by Snakes. GeoInformatica 2005, 9, 237–252. [Google Scholar] [CrossRef]
- Bishop, C.M. Pattern and Machine Learning; Springer Science+Business Media, LLC: New York, NY, USA, 2006. [Google Scholar]
- Karvonen, J.A. Baltic sea ice SAR segmentation and classification using modified pulse-coupled neural networks. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1566–1574. [Google Scholar] [CrossRef]
- Jarabo-Amores, P.; Rosa-Zurera, M.; de la Mata-Moya, D.; Vicen-Bueno, R.; Maldonado-Bascon, S. Spatial-range mean-shift filtering and segmentation applied to SAR images. IEEE Trans. Instrum. Meas. 2011, 60, 584–597. [Google Scholar] [CrossRef]
- Yu, Q.; Clausi, D.A. SAR sea-ice image analysis based on iterative region growing using semantics. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3919–3931. [Google Scholar] [CrossRef]
- Dekker, R.J. Texture analysis and classification of ERS SAR images for map updating of urban areas in the Netherlands. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1950–1958. [Google Scholar] [CrossRef]
- Mitra, D.; Basu, A. Performance testing of selected automated coastline detection techniques applied on multispectral satellite imageries. Earth Sci. Inform. 2017, 1–10. [Google Scholar] [CrossRef]
- Bruno, M.F.; Molfetta, M.G.; Mossa, M.; Nutricato, R.; Morea, A.; Chiaradia, M.T. Coastal observation through Cosmo-SkyMed high-resolution SAR images. In Proceedings of the 14th International Coastal Symposium, Sydney, Australia, 6–11 March 2016. [Google Scholar]
- Wiehle, S.; Lehner, S. Automated Waterline Detection in the Wadden Sea Using High Resolution TerraSAR-X Images. J. Sens. 2015, 2015. [Google Scholar] [CrossRef]
- Liu, Y.; Kerkering, H. Coastal Ocean Observing Systems; Elsevier (Academic Press): London, UK, 2015. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Shoreline Detection Quality | Ascending | Descending | Total | |||
|---|---|---|---|---|---|---|
| # | % | # | % | # | % | |
| Good | 42 | 53% | 30 | 29% | 72 | 40% |
| Acceptable | 20 | 25% | 8 | 8% | 28 | 15% |
| Poor or defect image | 17 | 22% | 65 | 63% | 82 | 45% |
| Total | 79 | 100% | 103 | 100% | 182 | 100% |
| Visual Classification Categories | Median Horizontal Error ε, Meters (# Images) 1 | ||
|---|---|---|---|
| Ascending Images | Descending Images | Ascending and Descending Images | |
| A. Good | 53.9 (39) | 36.3 (21) | 43.7 (60) |
| B. Acceptable | 112.4 (16) | 48.9 (7) | 81.9 (23) |
| A + B. Good or Acceptable | 58.8 (55) | 40.1 (28) | 51.2 (83) |
| C. Poor | 354.4 (12) | 282.8 (14) | 297.6 (26) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vandebroek, E.; Lindenbergh, R.; Van Leijen, F.; De Schipper, M.; De Vries, S.; Hanssen, R. Semi-Automated Monitoring of a Mega-Scale Beach Nourishment Using High-Resolution TerraSAR-X Satellite Data. Remote Sens. 2017, 9, 653. https://doi.org/10.3390/rs9070653
Vandebroek E, Lindenbergh R, Van Leijen F, De Schipper M, De Vries S, Hanssen R. Semi-Automated Monitoring of a Mega-Scale Beach Nourishment Using High-Resolution TerraSAR-X Satellite Data. Remote Sensing. 2017; 9(7):653. https://doi.org/10.3390/rs9070653
Chicago/Turabian StyleVandebroek, Elena, Roderik Lindenbergh, Freek Van Leijen, Matthieu De Schipper, Sierd De Vries, and Ramon Hanssen. 2017. "Semi-Automated Monitoring of a Mega-Scale Beach Nourishment Using High-Resolution TerraSAR-X Satellite Data" Remote Sensing 9, no. 7: 653. https://doi.org/10.3390/rs9070653
APA StyleVandebroek, E., Lindenbergh, R., Van Leijen, F., De Schipper, M., De Vries, S., & Hanssen, R. (2017). Semi-Automated Monitoring of a Mega-Scale Beach Nourishment Using High-Resolution TerraSAR-X Satellite Data. Remote Sensing, 9(7), 653. https://doi.org/10.3390/rs9070653