3.1. Space Segment and Navigation Signals
Up to 12 June 2016, 18 BDS-2 satellites and 5 BDS-3 satellites have been launched. Currently, three BDS-2 satellites, namely M1, G2 and M5, are no longer transmitting. In addition, the BDS-2 satellite G7 and BDS-3 satellite M3-S are in the phase of flight tests. As of October 2016, there are 14 BDS-2 satellites and 4 BDS-3 satellites in full operation, including 5 GEO, 8 IGSO and 5 MEO satellites. The information on the 18 operational satellites is included in
Table 2. The GEO and IGSO satellites operate in orbit at an altitude of 35,786 km with a period of revolution of 23 h 56 min. The IGSO satellites have an inclination of 55°, while the GEO satellites exhibit a non-zero inclination of 0.7°–1.7°. The MEO satellites are in a nearly circular orbit at an altitude of 21,528 km and an inclination of 55°, and complete the orbit in approximately 12 h 53 min. A PRN switch from C15 to C13 for I6 spacecraft was carried out on 11 October 2016.
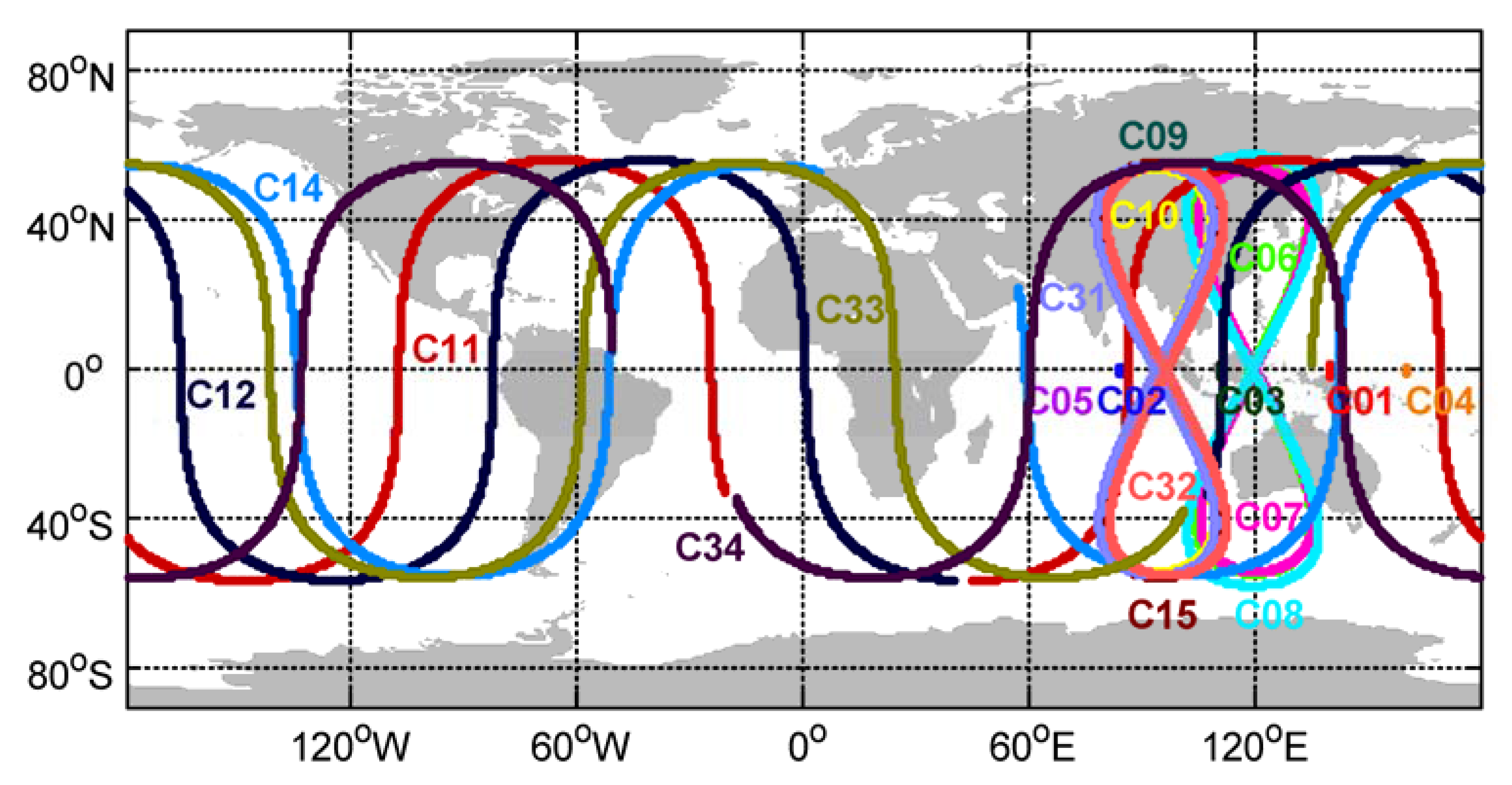
The 24-h ground tracks of BDS-2 and BDS-3 satellites available for positioning on 13 July 2016, are shown in
Figure 1. The ground tracks of IGSO satellites describe two similar loops in the shape of figure-of-eight. The average difference between longitudes of the two loops is roughly 30°. For main-land China, IGSO satellites provide an optimum coverage. The satellites with inclined geosynchronous orbits show an improved availability in terms of high elevation angles. When users are in densely populated areas, the so-called “urban canyon” problem can be alleviated due to the presence of IGSO satellites. The ground tracks are confined from approximately 76.2°E to 138.0°E longitude and 57.5°S to 57.5°N latitude for the eight IGSO satellites. Five GEO satellites distributed in the Indian and Pacific oceans over the Equator further complement the IGSO constellation. As such, the users in Asian-Pacific regions can observe enough satellites. The five GEO satellites are fixed in longitude because of active control, whereas their ground tracks exhibit small variations of up to 2° in latitude. Similar to the GPS, GLONASS and Galileo satellites, the BDS MEO satellites offer complete global coverage. The ground tracks of the MEO satellites are confined from 56.1°S to 56.1°N latitude.
The BDS-2 satellites transmit navigation signals in QPSK modulation on a total of three frequency bands, namely B1, B2 and B3 [
35]. Compared with the BDS-2 satellites, the signals of BDS-3 satellites are modified. In addition to B1 and B3 signals, the BDS-3 satellites are also capable of transmitting several new navigation signals, namely B1C, B2a and B2b. The B1C signal centered at 1,575.42 MHz is transmitted in TMBOC(6,1) modulation, and is compatible with GPS L1 signal and Galileo E1 signal. The B2a signal with a center frequency of 1176.45 MHz is modulated using BPSK(10), AltBOC(15,10) or TD-AltBOC(15,10) modulation, and is compatible with GPS L5 signal and Galileo E5a signal. The AltBOC(15,10) or TD-AltBOC(15,10) modulated B2b signal matches the Galileo E5b signal. It should be noted that the B2 signal of BDS-2 satellites and the B2b signal of BDS-3 satellites share the same frequency, but their modulation types are different. The carrier phase frequencies and chip rates of BDS signals covered by test receivers are provided in
Table 3. The B1, B1C, B2a, B2b and B3 signals can be simultaneously tracked for the BDS-3 satellites I2-S, M1-S and M2-S, while the receiver can only track the B1 and B3 signals for the I1-S satellite.
3.3. Characteristics of IFCB
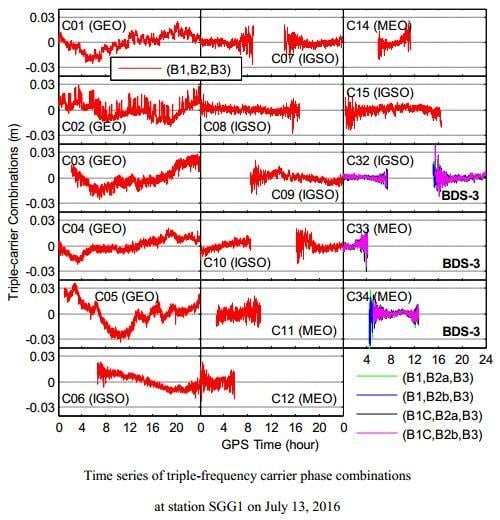
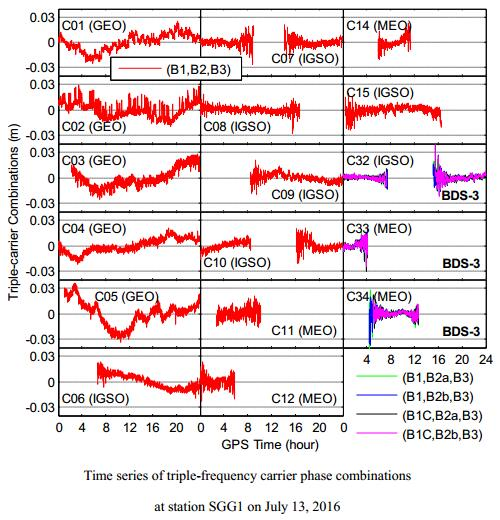
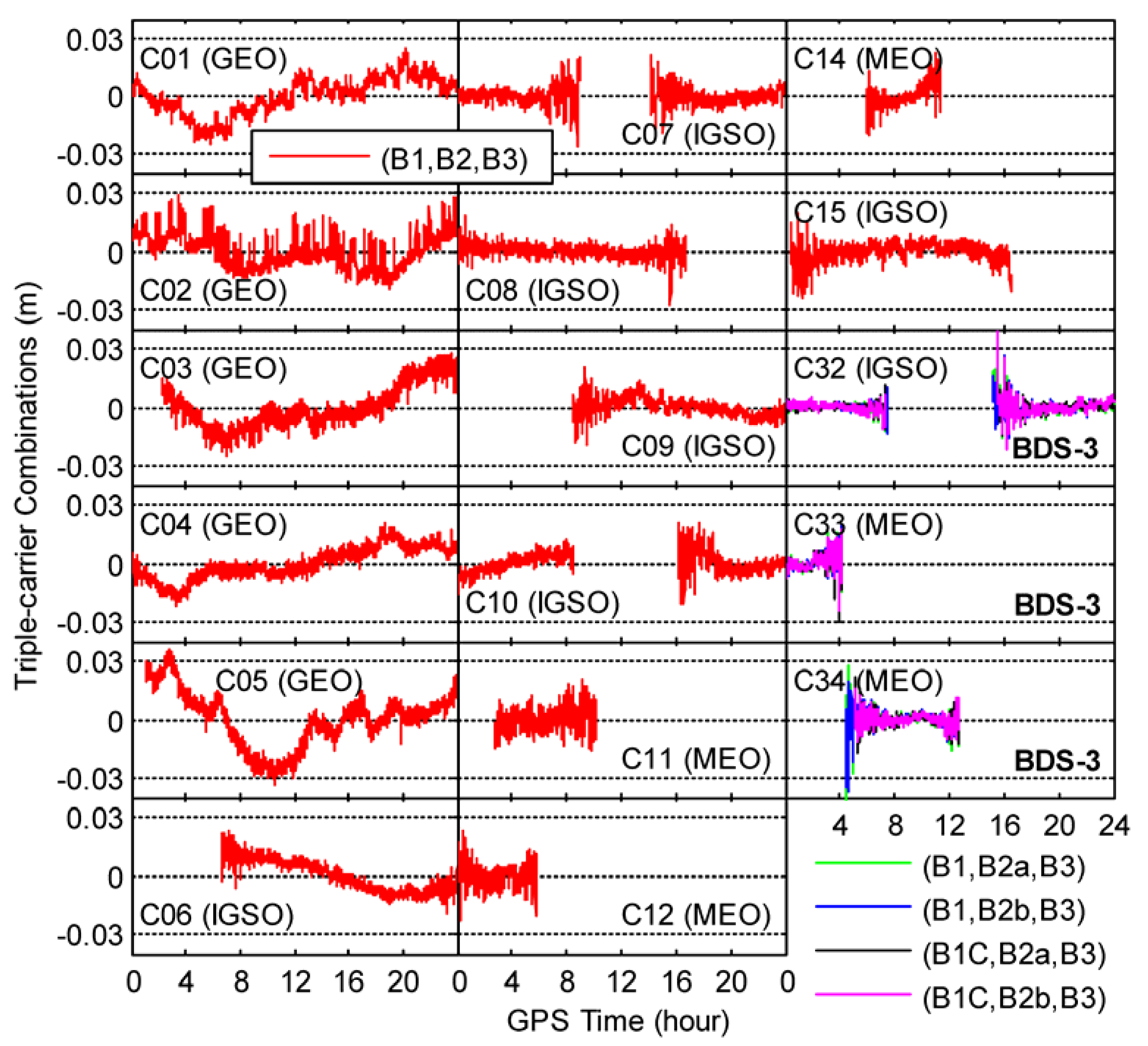
Figure 3 depicts the time series of B1/B2/B3 triple-carrier combinations for BDS-2 satellites as well as B1/B2a/B3, B1/B2b/B3, B1C/B2a/B3 and B1C/B2b/B3 triple-carrier combinations for BDS-3 satellites at station SGG1 on 13 July 2016. The triple-frequency carrier phase combination is actually the difference between two different ionospheric-free carrier phase combinations, and Equation (3) shows an example of B1/B2/B3 combination. Numerical values of the coefficients for each triple-frequency carrier phase combination are given in
Table 4. The phase ambiguity in triple-frequency carrier phase combination shown in Equation (3) is determined as the mean value of triple-carrier combination time series over the common continuous ambiguity block for all B1, B2 and B3 carrier phase observations. The phase ambiguity estimate is then removed from the original triple-carrier combination time series. It seems that an alternative way can be used to estimate the IFCB. However, the satellite revisit time for the stations located in different areas is different. The different tracking time of a satellite will affect the magnitude of its IFCB estimates. Bias variations are most evident for the BDS-2 GEO satellites and the oldest spacecraft C06 among the IGSO satellites. As to other BDS-2 satellites, small bias variations can also be recognized but they are generally confined to less than 2 cm. For BDS-3 satellites, in contrast, no significant biased variations can be observed and changes of the triple-carrier combination are often dominated by receiver phase multipath and noise (PMN). After the ambiguity term is eliminated in Equation (3), the residuals mainly include a weighted sum of phase noise, multipath and hardware delay. According to Pan et al. [
20], the receiver phase hardware delay should be stable over several hours, and thus it will be included in the phase ambiguity estimate and removed together with the ambiguity term. As to the satellite phase hardware delay, it will also be eliminated together with the ambiguity term since the triple-carrier combination time series of BDS-3 satellites do not show significant trend term. Therefore, the triple-carrier combination variations of BDS-3 satellites mainly show PMN changes. Similar discussions can also be found in Montenbruck et al. [
18]. The above noise refers to the measurement noise in carrier phase observations.
The results shown in
Figure 3 are obtained using a single station, which will be affected by numerous factors, such as the receiver quality, antenna quality and surrounding of the receiving antenna. Therefore, these results can only be roughly used for IFCB analysis. Actually, the triple-carrier combination time series show a comprehensive effect of the measurement noises, multipath as well as the time-varying portion of satellite phase hardware delay, namely IFCB. The satellite internal temperature variations due to varying sun illumination that depends on the relative geometry of the sun–spacecraft–earth may cause the variations of the satellite phase hardware delay, namely IFCB variations [
14,
20]. There is a negative correlation between the amplitude of single-day IFCB time series and the sun elevation above the satellite orbital plane. For the satellites with relatively lower sun elevation such as C05 and C06, the time series of triple-carrier combination show evident bias variations. As to BDS-3 satellites, there may be better thermal insulation processing at the signal transmission end. There are some reflectors near the station SGG1, including trees and walls. The multipath will have significant effect on the measurements for GEO satellites because of their almost constant elevation angles, especially for C05 with lowest elevation angles. The multipath is also an important attribution for the obvious bias variations of GEO satellites.
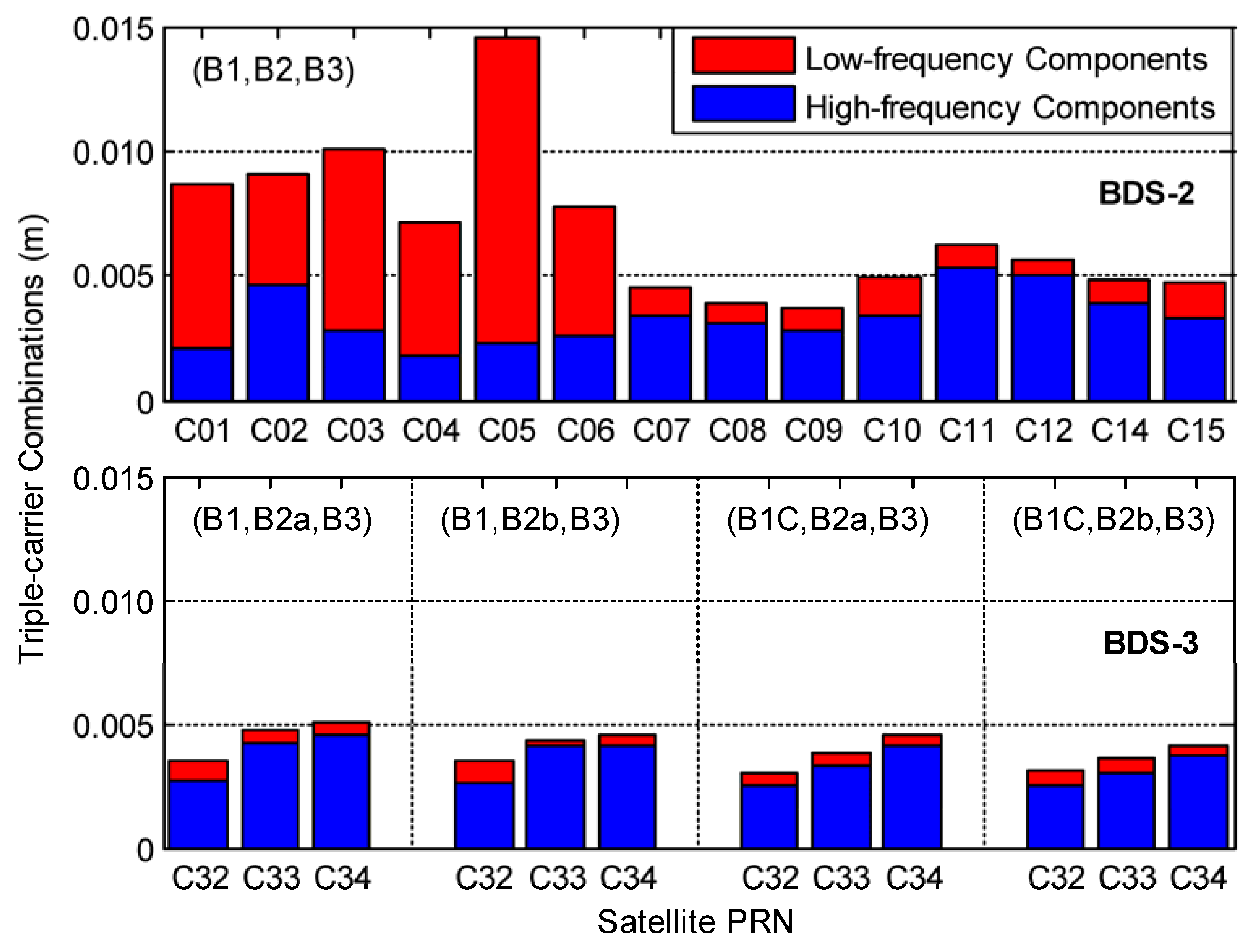
The root mean square (RMS) values of low-frequency and high-frequency components in the triple-frequency carrier phase combination time series for each BDS satellite are calculated using the datasets collected at SGG1 on 7–13 July 2016, and the results are shown in
Figure 4. The wavelet decomposition and reconstruction is used to separate the low-frequency and high-frequency components from their combination. In this contribution, the threshold value for the distinction between low-frequency and high-frequency components is roughly 3 × 10
−4 Hz, which is a compromise between different satellites since they show different noise level. It is important to note that the frequency threshold may be only appropriate for the datasets used in this paper. If we analyze the triple-carrier combination time series for GPS satellites, the frequency threshold should be determined once again. The Symlet wavelet ‘sym5’ is employed [
36]. The high-frequency components mainly contain the PMN, while the low-frequency components mainly reflect the longer-term changes, namely IFCB variations. The RMS values of low-frequency components range from 0.2 to 0.9 mm for BDS-3 satellites, indicating that no significant IFCB variations can be observed for these satellites. The RMS values of low-frequency components vary within a range of 4.5–12.2 mm for BDS-2 GEO satellites, while the corresponding varying range is 0.8–5.2 and 0.7–0.9 mm for BDS-2 IGSO and MEO satellites, respectively. A further characterization and analysis of IFCB for BDS-2 satellites is required. It is interesting to note that the GEO satellites with relatively higher sun elevations above the satellite orbital plane such as C01 and C04 also have larger low-frequency components. This is because the low-frequency components may also contain partial multipath. Alternatively, other unknown factors may affect the variations of triple-frequency carrier phase combination with respect to a single station, which needs further investigation. Due to the comprehensive effects of multipath and IFCB, all the GEO satellites and the IGSO satellite C06 show larger RMS statistics of triple-carrier combination time series.
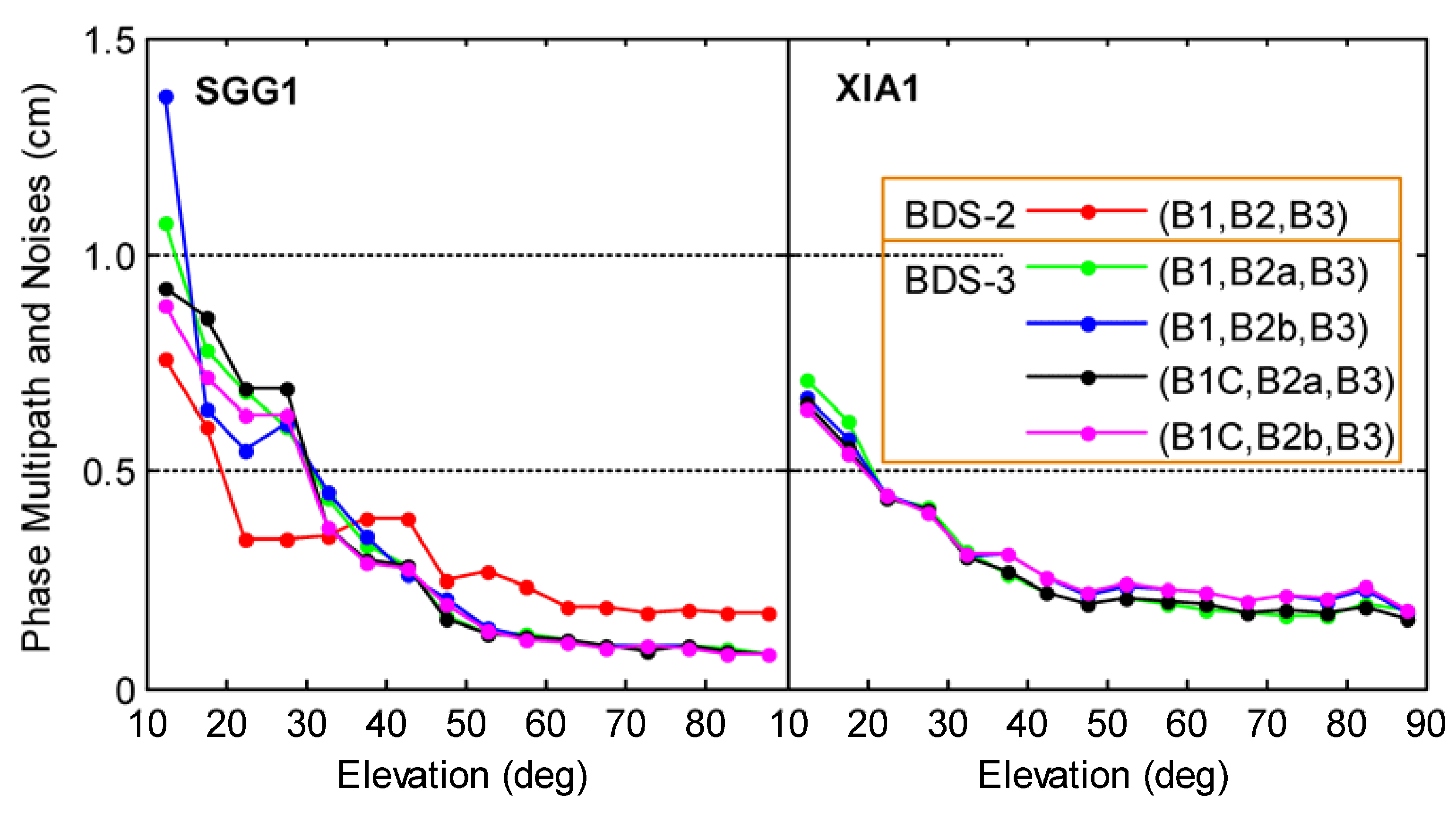
For the purpose of assessing the PMN level, the variation of RMS statistics of high-frequency components in the triple-carrier combination time series with elevation at SGG1 is plotted in
Figure 5. The RMS values are computed with respect to the increment of satellite elevation angles in steps of 5°. The PMN variations are quite consistent for the four different triple-frequency carrier phase combinations of BDS-3 tracking. The BDS-2 satellites show larger carrier phase errors compared with BDS-3 satellites at mid and high elevation angles. At elevation angle of 87.5°, the RMS PMN for all four triple-carrier combinations of BDS-3 satellites is 0.8 mm, while the RMS PMN for the B1/B2/B3 triple-carrier combination of BDS-2 satellites is 1.7 mm. At the 22.5° elevation, the RMS PMN for the four different combinations of BDS-3 satellites varies in a range of 5.5–6.9 mm, while the corresponding RMS PMN for BDS-2 satellites is 3.5 mm. For comparison, the right plot illustrates the results from XIA1 of 2–15 September 2016. The receiver and antenna information for the stations SGG1 and XIA1 is listed in
Table 5. A prototype receiver is set up at the station SGG1, and it is developed by one university in China. The stations SGG1 and XIA1 are equipped with different types of receivers and antennas. The comparison reveals the PMN differences caused by the different tracking performance of the specific receiver and antenna quality with respect to its multipath sensitivity as well as surrounding of the receiving antenna. According to the results at the two stations, the representative RMS errors at low elevations are 10 mm for the high-frequency components in the triple-frequency carrier phase combination, while the corresponding errors at medium and high elevations are 2 mm. Assuming, for simplicity, equal error variances on all frequencies, the 1
σ PMN for triple-frequency combination is 2.3–2.5 times larger than that of the individual signals. We can conclude that the PMN errors for BDS tracking on a single frequency vary in a range of 1 to 4 mm over the considered satellite elevation ranges.
Based on ED strategy, the datasets on 32 consecutive days, i.e., 15 August–15 September 2016, are processed for all BDS-2 satellites.
Figure 6 provides the time series of IFCB estimates. It is obvious that the IFCB changes over time, and the IFCB variations are generally confined to peak amplitudes of about 5 cm, except for C15. Most importantly, the IFCB exhibits notable periodic signal. The RMS statistics of IFCB estimates over the 32 days are also provided in each sub-figure. C01 has the smallest RMS values of 0.010 m, while C15 RMS values are the largest with value of 0.068 m. Compared with the results shown in
Figure 3 and
Figure 4, the results shown in
Figure 6 can be better used for IFCB analysis. The IFCB estimation here is conducted based on a weighted average of solutions over the entire network, and thus the many influence factors such as measurement noises and multipath can be alleviated. Based on the law of random error propagation and reasonable assumption, the standard deviation (STD) of the IFCB estimates is computed and found to be usually smaller than 4 mm, except for C15. The sun elevation above the satellite orbital plane is highest for C01 during this period of time, and thus C01 has the smallest RMS IFCB. As to C06 and C08, they have the second largest RMS IFCB due to the relatively lower sun elevations. The reason for the largest RMS IFCB for C15 is that the number for stations with the capability of offering B1/B2/B3 tracking is not sufficient. The ED IFCB estimates for C15 are inaccurate at many epochs, and thus there are many accumulated errors when calculating the IFCB through accumulation. According to Pan et al. [
20], the single-day IFCB time series of GPS show significant periods of 12, 8, 6, 4.8, 4 and 3 h. Some periods such as 8 h cannot be explained by the sun illumination, which indicates that other factors also affect the IFCB variations. Therefore, the factors that affect the IFCB variations need further investigation, but this does not limit the applications of IFCB to triple-frequency PPP.
The number of stations in the ground tracking network mainly determines the accuracy and reliability of IFCB estimates [
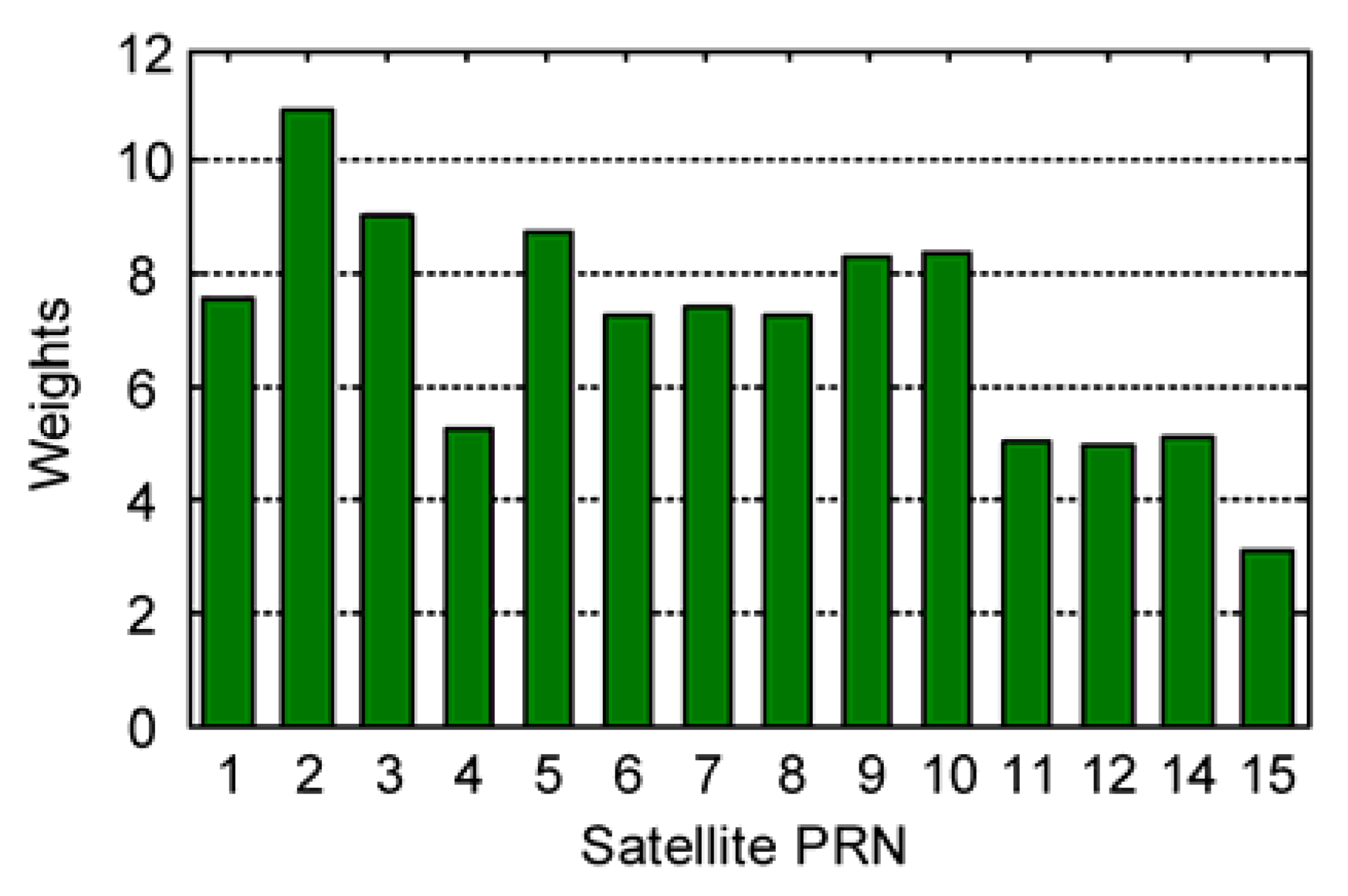
21]. Taking into account the effect of measurement noises, it is better to use the sum of weights of ED IFCB for the reflection of the performance of IFCB estimates, as shown in Equation (6).
Figure 7 shows the average values of sum of weights at an epoch over the 32 days for each BDS-2 satellite. It is observed that the average weight is only 3.1 for C15, while the average weight falls between 5.0 and 10.9 for other satellites. Due to the smaller weights, the IFCB estimates shown in
Figure 6 exhibit higher noise level. The reason for the smallest weights from C15 is that many stations currently offer B1/B2 tracking rather than B1/B2/B3 tracking for this satellite. This explains the largest fluctuation amplitudes of IFCB time series for C15.
In real-time triple-frequency PPP, the IFCB should be estimated in real time. In addition to the computational burden, the data streams with BDS observations broadcast by a global ground tracking network should be received in real time. The above real-time estimation process for IFCB will bring additional heavy workload for the real-time triple-frequency PPP users. The IFCB prediction with a high accuracy is a possible way to minimize the workload. Following Pan et al. [
20], the IFCB periods roughly coincide with the orbital repeat periods of the satellites. Thus, the IFCB of the first day is utilized to predict that of the second day for GEO and IGSO satellites and of the day after a week for MEO satellites. The similarity degree between single-day IFCB time series of two different days can be assessed by the cross-correlation [
37]. A cross-correlation is performed on the single-day IFCB time series for two consecutive days or two days with an interval of a week. The normalized cross-correlation results at 1680 s lag for MEO satellites and at 240 s lag for GEO and IGSO satellites are shown in
Figure 8. The time lag should be considered because of the difference between a solar day and a sidereal day. For all GEO and IGSO satellites except C01, C02 and C15, the cross-correlation values are larger than 0.6 for most cases. In addition, all MEO satellites show low similarity between waveforms of IFCB time series for two days, which may be attributed to the small IFCB variations and the long time span for IFCB prediction.
Table 6 provides the average values of cross-correlation coefficient over 32 days for each BDS-2 satellite. According to the average results for the same orbit type of satellites, the cross-correlation coefficient between the IFCB series of two days is 0.625, 0.689 and 0.217 for GEO, IGSO and MEO satellites, respectively.
After subtracting IFCB time series of the first day from those of the day after a week for MEO satellites and of the second day for GEO and IGSO satellites, the residuals are plotted in
Figure 9. The time lag is considered. The residual series show a decrease of fluctuation amplitudes from about 5 cm to about 3 cm in comparison to the IFCB series for most satellites. The RMS statistics of residuals for the 32 days are also shown in each panel. According to the average results of the 14 satellites, the prediction accuracy of IFCB is 1.2 cm.
3.4. Performance Evaluation of Triple-Frequency PPP
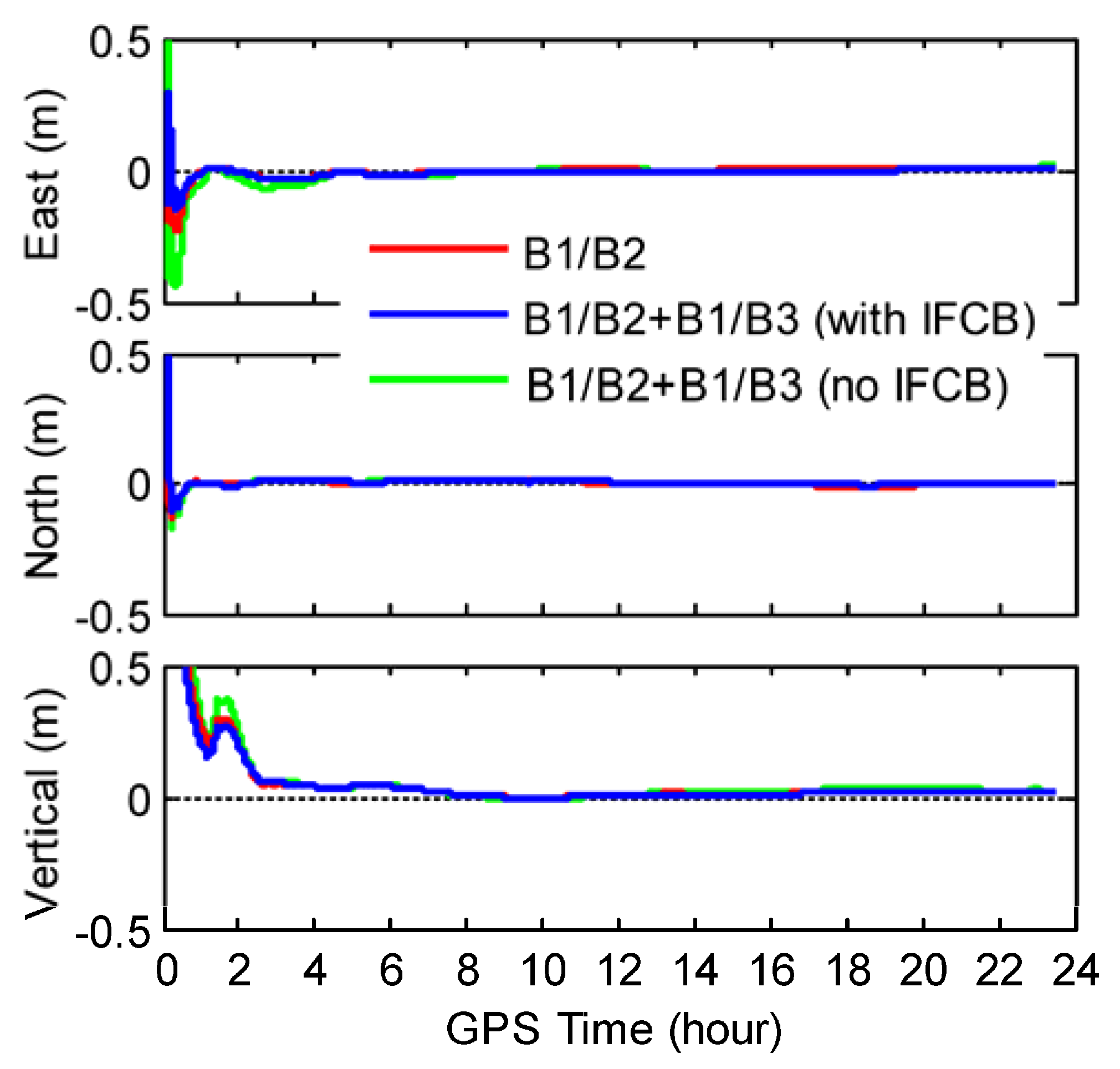
In order to validate the correctness of IFCB estimates, the performance of triple-frequency PPP is evaluated. The IFCB corrections are derived by prediction. As the precise satellite orbit and clock products of BDS-3 satellites are still unavailable, only BDS-2 satellites are used. For the purpose of comparison, the traditional B1/B2-based PPP processing is also carried out. The epoch-wise positioning errors for dual- and triple-frequency cases in the east, north and vertical directions at JFNG on 12 September 2016 are shown in
Figure 10, and their variations are consistent for the two different cases in all three directions. Nevertheless, the convergence performance of triple-frequency case in the first two hours is slightly better than that of dual-frequency case. Compared to the dual-frequency PPP solutions, the triple-frequency PPP solutions are more stable even after a long convergence time. The RMS values of positioning errors over the last 15 min as well as the convergence time for dual- and triple-frequency PPP solutions are presented in
Table 7. In this study, the position filter is considered to have converged when the positioning errors reach 0.1 m and keep within 0.1 m. According to Li et al. [
38], the BDS B1/B2 PPP requires more than two hours to achieve a positioning accuracy better than 0.1 m for all three coordinate components. Therefore, our results are comparable to theirs. The reason for the longer convergence time of BDS PPP in comparison to GPS PPP is that the BDS satellite orbit and clock are at a relatively lower accuracy [
9], and BDS measurements exhibit relatively higher noise level [
17]. In addition, BDS position dilution of precision (PDOP) values are larger in most times than the GPS case although the former has more visible satellites at the station JFNG with the coverage of BDS service. For comparison, the epoch-wise positioning errors and the corresponding statistical values for the triple-frequency PPP without IFCB consideration are also shown in
Figure 10 and
Table 7. Its positioning accuracy and convergence performance are worse than those of the other two BDS PPP cases. The results indicate that the positioning performance will degrade without careful consideration of the IFCB, even if B1/B3 observations are added to the B1/B2 PPP processing.
The datasets from 9 stations covered by the BDS service of the Asia-Pacific area on 12–13 September 2016 are used for the accuracy statistics. For each 24-h session, the RMS statistics are computed using the positioning errors of the last 15 min. Theoretically, the position solution at the last epoch for the PPP with the use of Kalman filter has the highest positioning accuracy. However, the position solutions may still show fluctuations after a long observation time of approximately 24 hours if the re-convergence occurs due to the frequent cycle slips, the gross errors, the insufficient satellite number or even the signal blockage. For reliability, it may be better to use a period of time rather than an epoch at the end of a session for RMS calculation. Cai et al. [
39] also adopted a time span of 15 min at the end of each session for RMS calculation. The average positioning errors for all 24-h cases are calculated based on the RMS values. An accuracy of 1.7, 0.4 and 2.0 cm in the east, north and vertical coordinate components is achieved for B1/B2 PPP, respectively. Taking IFCB into account, the triple-frequency PPP improves the positioning accuracy by 12%, 25% and 10% over the B1/B2 PPP to 1.5, 0.3 and 1.8 cm in the three coordinate components, respectively.
As there are mainly measurement noises as well as other unmodeled errors in observation residuals, they can be used for the evaluation of triple-frequency PPP model. The residuals of B1/B2 and B1/B3 ionospheric-free combined carrier phase observations in the triple-frequency PPP from JFNG of 12 September 2016 are shown in
Figure 11. Different satellites are identified by different colors. The RMS values of phase residuals for all BDS-2 satellites are also given in each panel. B1/B2 and B1/B3 phase observation residuals appear at the same level and no significant systematic errors can be found in the B1/B3 phase residuals. It is suggested that we have properly handled the issue of satellite clocks in triple-frequency PPP model. For the purpose of further analysis, the B1/B3 phase observation residuals are re-computed when neglecting the IFCB, which indicates larger phase residuals with RMS statistics of 0.018 m. Although the difference between B1/B3 phase residuals of triple-frequency PPP with and without IFCB consideration is only 4 mm, the latter ones show systematic errors.
The robustness of position solutions is also very important in PPP besides the positioning accuracy. When the observations on B2 frequency are poorly tracked or contaminated, the benefits will be more significant after adding B3 observations to the B1/B2 PPP processing. In this paper, we only consider the ambiguity-float PPP solutions. It is expected that the ambiguity resolution will benefit from the extra frequency. Given that high-accuracy and reliable float solutions can be achieved by the triple-frequency PPP developed here, the triple-frequency PPP with AR can be investigated based on this.
For completeness, the datasets used for accuracy statistics are re-computed after adding
P1/
P3 ionospheric-free combined code observations to triple-frequency PPP processing. The code-specific IFCB is obtained using the DCB products, which are provided by German Space Operations Center. The average positioning accuracy and convergence time for all 24-h cases are calculated and listed in
Table 8. For comparison, the results for the triple-frequency PPP developed here are also given in
Table 8. After adding
P1/
P3 code observations, the convergence time shows a decrease of 1.1–3.6 min in three directions, but no significant change is found for the positioning accuracy. Greater benefits from
P1/
P3 code observations for triple-frequency PPP can be expected as long as the code-specific IFCB is thoroughly investigated and precisely estimated.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}