1. Introduction
The Spaceborne Synthetic Aperture Radar (SAR) has dozens of operation modes, such as the stripmap mode, ScanSAR mode, TOPS mode, spotlight mode and the sliding spotlight mode, to image regions of interest (ROI) with variant combination of resolutions and swaths [
1,
2,
3,
4,
5,
6,
7,
8]. Despite the differences of these modes, they have one thing in common: their Beam Illumination Strip (BIS) (except for the spotlight mode) are all along the satellite ground-track direction [
9,
10,
11,
12,
13]. As a result, for most current SAR satellites that move in near-polar orbits, their BISs are all nearly along north–south directions, whatever modes they operate in. In this case, if a ROI is tilted with respect to the satellite orbit and has a span wider than the cross-track swath of the BIS as shown in
Figure 1a, more strips should be used to fully cover the tilted ROI. The seismic fault is a typical kind of such tilted ROI. To implement full coverage, one strategy is to use the ScanSAR mode or TOPS mode by dividing the whole Data Acquisition Period (DAP) into multiple bursts for multiple sub-strips by sacrificing the azimuth resolution. Another strategy is to use multiple orbits of observation by sacrificing the DAP. Though a recent Staggered SAR mode can image a much wider swath without the resolution scarification or DAP prolongation [
14,
15,
16], it is, along with the former two strategies, to induce large amount of invalid data from disinterested regions such as those marked as Region E in
Figure 1a. In sum, all these methods have inevitable drawbacks and thus are not the best solutions for the problem of imaging a tilted-with-orbit ROI in high resolutions and with a high data utilization efficiency.
To solve this problem, a Spaceborne Stripmap Range Sweep SAR (SS-RSSAR) has been proposed in a previous paper to generate a ROI-matched BIS by continuously sweeping the beam in elevation [
17]. However, restricted by its fixed azimuth antenna pointing, the SS-RSSAR can only image a ROI in a stripmap-level azimuth resolution. In this paper a new Spaceborne Sliding Spotlight Range Sweep SAR (SSS-RSSAR) is proposed to achieve a higher azimuth resolution than the SS-RSSAR by not only continuously sweeping the beam in range for the ROI tracking, but also in azimuth to achieve an enlarged synthetic aperture for an improved azimuth resolution as shown in
Figure 1b. Two major aspects of the SSS-RSSAR are to be focused in this paper: the system design and the imaging technique. The former part determines how the echo from the ROI should be collected and the latter part discusses how this echo should be focused. They serve as the basis for the new SSS-RSSAR theory.
Similar to the SS-RSSAR mode, the SSS-RSSAR’s Central Beam Pointing (CBP), which denotes the beam pointing at the central data acquisition time, is arranged to be perpendicular to the BIS for a good balance between the imaging swath and the signal-to-noise ratio [
17]. In this case, the SSS-RSSAR is likely to operate with a large squint angle if the ROI is highly squinted with respect to the satellite orbit. As the radar antenna cannot receive while transmitting [
18], the SSS-RSSAR is likely to suffer from the problem of transmission blockage due to the serious slant range variation caused by the continuous Two Dimensional (2D) beam steering. Aiming at overcoming this problem, a new Continuous Varying Pulse Interval (CVPI) technique is employed by the SSS-RSSAR to counteract the slant range variation by continuously adjusting the Pulse Intervals (PIs) based on the instant Central Beam Slant Range (CBSR), defined as the slant range from the SAR antenna center to the ground beam pointing. The core strategy of the CVPI technique is to locate the echo from the ROI at the central part of every PI. In this case, the space that can be used for the non-blocked echo receiving can be maximized. Due to the spatial variation of the CBSR, the SSS-RSSAR is characterized by non-uniform azimuth sampling, where the azimuth dependent PI array can be conveniently described by a fifth-order polynomial.
Due to the perpendicular-to-BIS CBP and its resulted large squint geometry, the echo is to suffer from serious 2D coupling and therefore, the imaging algorithm applied for the SSS-RSSAR should be carefully chosen. The basic Back Projection Algorithm (BPA) is not preferred due to its cost-inefficient
O (
N3) computational load [
19]. The frequency domain algorithms that can be used for large-squint imaging, such as the Range Doppler Algorithm (RDA), Chirp Scaling Algorithm (CSA) and Range Migration Algorithm (RMA) [
20,
21,
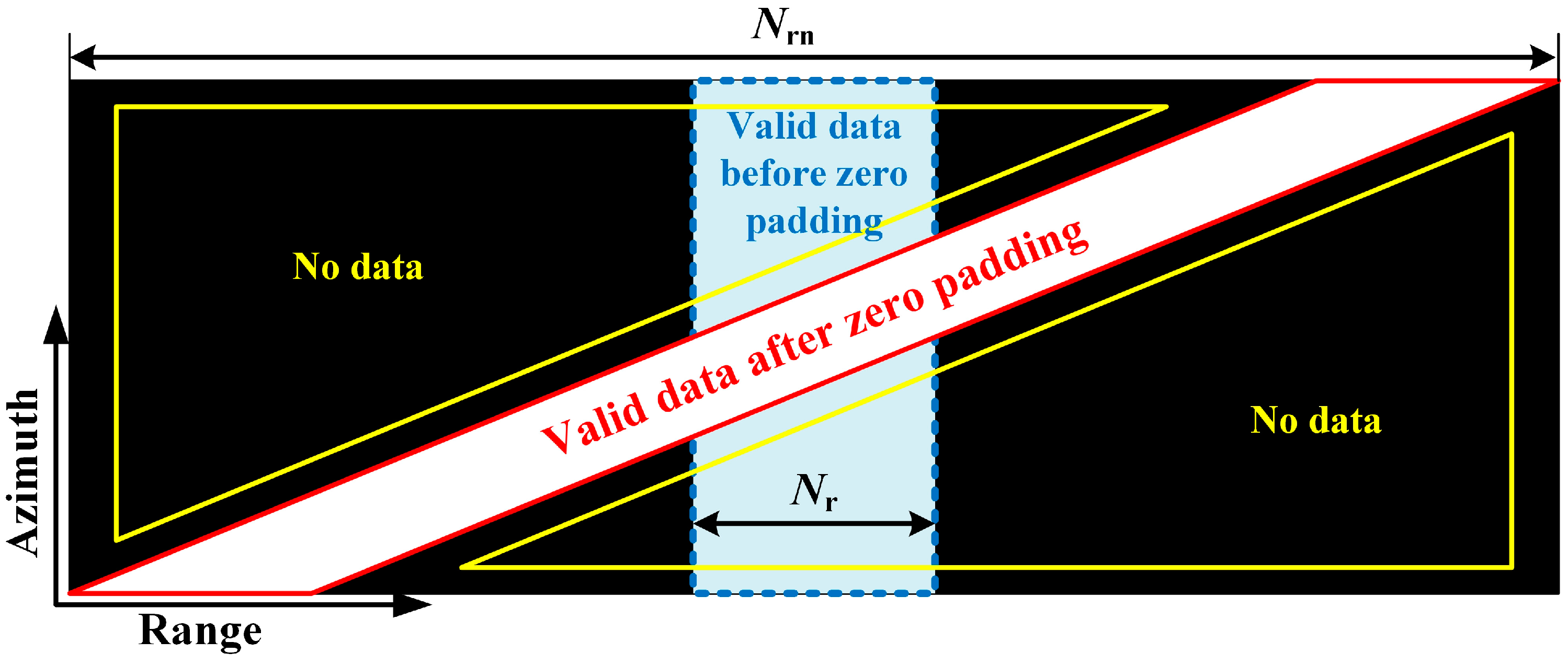
22], are all not ideal choices. This is because, if processed by these algorithms, the slant range that has been counteracted by the CVPI technique should be added back to the echo by using the zero padding, resulting in a much larger total data amount. The Polar Format Algorithm (PFA) seems to be the only frequency domain based algorithm that is capable of implementing a fast processing speed and a high data utilization efficiency [
3,
23]. However, due to the non-uniform azimuth sampling caused by the CVPI technique, the PFA cannot be directly applied for the SSS-RSSAR imaging. In this paper, a Modified PFA (MPFA) is proposed to focus the SSS-RSSAR’s echo received with the CVPI technique. The main modifications include an updated 2D dechirp filter and an interpolation-based data format correction based on a new wavenumber expression with respect to the CVPI technique.
Based on the CVPI technique and the MPFA imaging method, this study will further discuss the parameter design methods for the SSS-RSSAR. Firstly, based on the analyses for the least required range sample number, an optimized pulse width can be achieved. Then, based on the discussion on the least required azimuth sample, the referential pulse interval used for initiating the non-uniform PI array generation can be calculated. Generally speaking, the carrier frequency and the chirp rate are both constant during the whole DAP. For the SSS-RSSAR, however, the constant carrier frequency and chirp rate will lead to serious spatial variation of the wavenumber and therefore, the range wavenumber bandwidth after the MPFA processing will be seriously compressed, leading to a much decreased range resolution. To overcome this shortage, a new Parameter-Adjusting (PA) technique is proposed to mitigate the range wavenumber variation by adjusting the carrier frequency and the chirp rate pulse by pulse based on the instant data acquisition geometry. The methods of designing the sliding spotlight factor and the DAP are also introduced. Finally, an integrate parameter design flow for the SSS-RSSAR is provided.
The advantages of the SSS-RSSAR over the traditional Spaceborne Sliding Spotlight SAR (SSS-SAR) are also analyzed, mainly from two aspects: the total data amount and the total computational load. These analyses are made based on the assumption that both the SSS-RSSAR and the traditional SSS-SAR have perpendicular-to-BIS CBP. Based on the total data amount, the computational loads of the algorithms, including the MPFA, RDA, CSA and RMA, are compared. While the computational load of the MPFA is derived based on the total data amount collected from the tilted along-ROI BIS, the derivation of the computational loads of the RDA, CSA and RMA, on the other hand, are made based on the total data amount with respect to the parallel-to-orbit BIS. The reasons of choosing different data sets for the computational load comparison are: firstly, except for the MPFA, the echo of the SSS-RSSAR with the parameters specially designed based on the MPFA cannot be focused by the other algorithms. Secondly, if the algorithms such as the RDA, CSA and RMA were used for focusing, the parallel-to-orbit BIS would be the best data acquisition mode with the least data amount and lightest signal coupling. As has been demonstrated by the simulation experiments, comparing to the traditional SSS-SAR, the SSS-RSSAR contributes to a better performance as it requires less total data amount and lighter computational load in imaging a moderate-swath tilted-with-orbit ROI in a high resolution level.
The paper is arranged as follows.
Section 2 discusses the CVPI technique for the non-uniform azimuth sampling.
Section 3 discusses the MPFA for the SSS-RSSAR imaging.
Section 4 discusses the parameter design methods for the SSS-RSSAR.
Section 5 compares the total data mount and the total computational load between the SSS-RSSAR and the traditional SSS-SAR. The presented approach is evaluated in
Section 6 by using the point target simulations. The study is summarized in
Section 7 with a brief plan for the next-step research.
2. Continuous Varying Pulse Interval Technique
Similar to the discussion for the SS-RSSAR in [
17], the CBP of the SSS-RSSAR is assumed to point vertically to the ROI strip as shown in
Figure 2, where
m denotes the azimuth sampling index and
m = 0 denotes the central data acquisition time. The antenna should be continuously manipulated in two dimensions to make sure the ground beam center always moves along the X-axis. A Cartesian coordinate is built to simplify the discussions. The origin
O overlaps with the swath center. The X-axis is along the along-BIS direction. The Y-axis is along the cross-BIS direction in the ground plane, corresponding to the projection of CBSR at
m = 0. The Z-axis is vertical to the ground plane and points inversely to the Earth center. The directions along the X- and Y-axis are defined as the azimuth and range directions, respectively.
Other parameters are defined as follows. H denotes the constant height of the SSS-RSSAR. θ denotes the tile angle between the X-axis and the nadir of the satellite tract. β denotes the instant look angle with respect to the swath center O. α denotes the instant azimuth angle between the Y-axis and the projection of the instant slant range from the SAR antenna center to the swath center O. βc and Rc0 denote the central look angle and the central slant range with respect to the swath center at m = 0. p and k denote two azimuth sampling indexes before and after the central data acquisition time. The CBSR at m = p and m = k are Rcp and Rck, respectively. Wr and Wa denote the expected range and azimuth BIS swaths. The real curved satellite orbit is assumed to be rectilinear here for simplicity.
Vs and
Vg denote the satellite velocity and the beam velocity along the X-axis, respectively. They have the following relationship
where
η denotes the sliding spotlight factor. The SS-RSSAR mode discussed in [
17] corresponds to the very case with
η = 1. If a traditional constant PI was applied for the SSS-RSSAR, the continuous range-azimuth beam sweeping would lead to slant range variation and inevitably cause the transmission blockage. To solve this problem, a new CVPI technique is developed for the full echo receiving by non-uniformly adjusting the PIs based on the instant data acquisition geometry. Unlike the Multi-Interval Sampling (MIS) technique used by the SS-RSSAR [
17], the CVPI technique continuously varies the PI sequence by employing a polynomial fitting method. Furthermore, unlike the MIS technique that changes the number of PI between the transmitting and receiving, the CVPI technique keeps this number unchanged during the entire DAP. Thus, the CVPI-based non-uniform azimuth sampling array will be easier to design and generate.
The key idea of the CVPI method is to locate the echo of the targets along X-axis to the center of every PI. In this case, all the echoes from the ROI can be set around the central part of every PI. In other words, the expected PI variation should counteract the CBSR variation within the DAP. For the three sampling positions with the CBSRs
Rcp,
Rc0 and
Rck in
Figure 2, the expected CVPI-based echo distribution is shown in
Figure 3, where, despite the differences of the
Rcp,
Rc0 and
Rck, all the echoes are all located at the central part of their individual PIs.
A fifth-order polynomial of the azimuth time is used for the PI variation description. In this case, the
mth PI can be expressed by
where
μn denotes the polynomial coefficient and
t denotes the azimuth time. A referential PI, denoted as
PI0, should be set firstly to initiate the non-uniform PI array generation. Notice that
PI0 should be both large enough to enclose all the echoes from the ROI strip and small enough to avoid the Doppler aliasing. The detailed method of calculating
PI0 will be discussed in
Section 4. Based on a given
PI0, the PI number
M between the transmitting and receiving should then be calculated as
where
c denotes the speed of light and the operator (·) computes the maximum integer not larger than the input number. Then by using the stop-go model, the CBSR at the
mth sample yields
By substituting Equation (2) into Equation (4), the latter can be rewritten in the matrix formation as
where
where
Na denotes the azimuth sample number. The elements of Matrix
A and
B, denoted by
amj and
bm, yield
The vector
μ can be solved out based on the least-square method. Note that the pulse intervals are no longer uniform, the azimuth sampling time
t should be calculated iteratively as
where
t0 denotes the start time of the data acquisition, followed by a PI equaling to
PI0.
4. System Parameter Design
4.1. Range Sample Number and Pulse Width
For a traditional SAR system, the sampling rate should be higher than the bandwidth of the transmitted LFM signal to avoid aliasing. For the SSS-RSSAR, however, as the range LFM characteristic is removed by the 2D dechirp processing, the range non-aliasing sampling restriction is different from the traditional SAR systems.
For an observation task with an expected ground range resolution
ρr, the bandwidth of the LFM signal, denoted by
Br, can be set as
However, after the 2D dechirp, there will be a unique mapping between the target position and its frequency [
3] and thus, the signal will have a new bandwidth
Brn based on the geometry in
Figure 2 as
The non-aliasing sampling rate
Fs should be slightly higher than the new bandwidth
Brn as
where
σ denotes an oversampling factor ranging from 1.1~1.3. The chirp rate
γ in Equation (33) can be rewritten based on the characteristic of the LFM signal as
By substituting Equations (32), (33) and (35) into Equation (34), the sampling rate can be rewritten as
On the other aspect, the echo length
τw can be estimated by
The least required range sample number
Nrmin can be achieved by multiplying
Fs with
τw as
On the other hand,
Nr also has an upper limit
Nrmax corresponding to the case that all the space of the minimum PI is used for the data receiving as
The final range sample number
Nr can then be set slightly higher than
Nrmin but lower than
Nrmax. Based on Equation (38), it is clear that the longer the
Tp, the smaller the required range sample number. Thus, the pulse width should be elongated as much as possible to decrease the least required total data amount. However,
Tp cannot be elongated limitlessly. The upper limit for
Tp, denoted as
Tpmax, corresponds to the case that the echo length
τw equals to the minimum
PI as
For a real SSS-RSSAR system, Tp should be slightly smaller than the theoretical upper limit Tpmax to leave enough space for the antenna to switch between the transmitting and receiving.
4.2. Azimuth Sample Number and Referential Pulse Interval
As has been discussion in
Section 2, the whole non-uniform PI array should be generated based on an initially set referential PI, the design of which, as will be seen below, is based on the least required non-aliasing azimuth sample number. Similar to the range bandwidth, the azimuth bandwidth of the SSS-RSSAR will also be changed by the 2D dechirp. After the range interpolation, the azimuth bandwidth of the total wavenumber spectrum, denoted as Δ
KX, yields
Note that Δ
KX is actually wider than the azimuth wavenumber bandwidth of the signal because the total azimuth sample number
Na is larger than the azimuth sample number for an individual target, such as
Nas in Equation (9). To avoid the azimuth aliasing, the azimuth swath of the reconstructed image should be wider than the BIS swath along the X-axis as
By substituting Equations (25), (41) into Equation (42), the least required azimuth sample number
Namin can be estimated by assuming
i = 0 for simplicity as
The final azimuth sample number
Na can be set slightly larger than
Namin. Then by assuming the length of orbit over which the SSS-RSSAR flies during the DAP is
D, the referential pulse interval
PI0 can be achieved as
Based on Equation (44) and the CVPI technique, the total non-uniform azimuth sampling array can be generated iteratively based on Equation (8). Due to the
PI variation, the validity of the
PI array should be checked to ensure that the echo from the ROI can be fully recorded in every
PI as
Otherwise, PI0 should be further elongated for a new PI array generation until the condition in Equation (45) can be satisfied.
4.3. Carrier Frequency and Chirp Rate
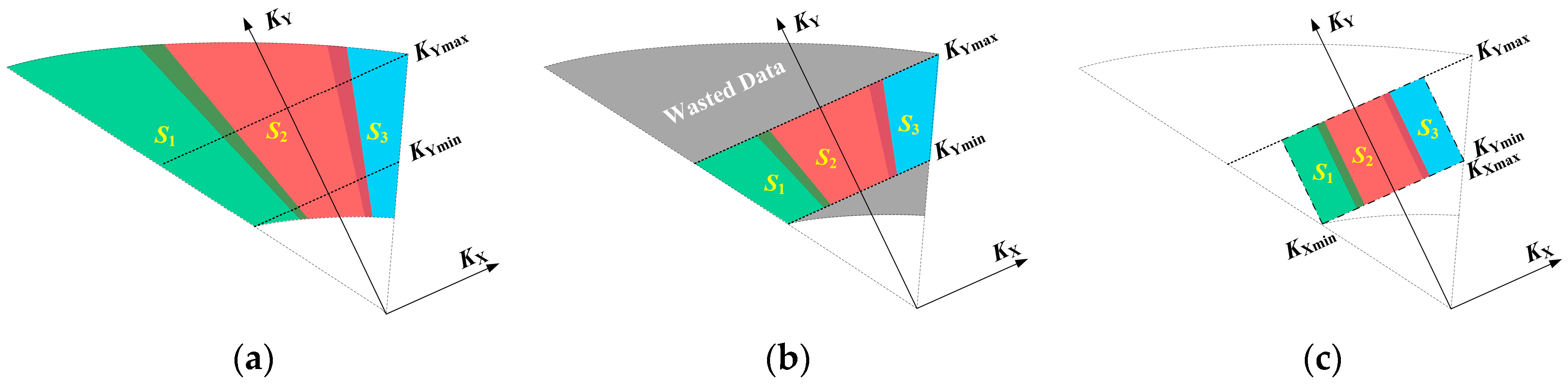
By comparing
Figure 5a,b, it is clear that due to the serious spatial variation of the range wavenumber, a large ratio of data, marked by the grey regions, have been wasted, resulting in a much compressed range bandwidth of
KY and a degraded range resolution. In an extreme case where
KYmax is smaller than
KYmin, it is even impossible to implement focusing.
Based on Equation (21), the spatial variation of
KY is caused by the variations of the instant look angle
β and azimuth angle
α and the azimuth-dependent time delay
τd. These two kinds of variations have different impacts on
KY. As the angle-related range wavenumber variation is range-independent, it can be fully counteracted by using the PA method discussed in [
23]. On the other aspect, the range wavenumber variation caused by
τd relies on both the range and azimuth, hence cannot be fully compensated by the PA method. As a result, the echo cannot be directly received with the Keystone format distribution, as shown in
Figure 5b, by adjusting the parameters pulse by pulse. However, we can develop a new PA technique based on the expression of the range wavenumber to suppress the spatial variation of
KY and to minimize the loss of the range wavenumber bandwidth while conducting the range interpolation.
Similar to the PA technique in [
23], the new PA technique adjusts the carrier frequency
fc and the chirp rate
γ pulse by pulse based on the instant data acquisition geometry as
where
fc0 and
γ0 denote the constant referential carrier frequency and the constant referential chirp rate, respectively. The first faction is to counteract the angle-related spatial variation and the second faction is to suppress the spatial variation caused by
τd.
By applying the new PA technique in Equation (46), the recorded polar format data are shown in
Figure 6a, where the spatial variation of the range wavenumber has been greatly suppressed. In this case, the Keystone format data generated by the range interpolation, as shown in
Figure 6b, suffer from a much less range wavenumber bandwidth loss. The rectangular format data after the azimuth interpolation are shown in
Figure 6c. Comparing
Figure 5 and
Figure 6, it is clear that the ratio of the wasted data has been effectively decreased benefiting from the new PA manipulation in Equation (46).
4.4. Sliding Spotlight Factor and Data Acquisition Period
The sliding spotlight factor
η of the SSS-RSSAR determines how fast the beam is steered in azimuth. Similar to the traditional sliding spotlight SAR system, the sliding spotlight factor of the SSS-RSSAR can be estimated by the time of the azimuth resolution improvement with respect to its stripmap mode, the SS-RSSAR, as
where
ρa and
ρa0 denote the azimuth resolutions of the SSS-RSSAR and the SS-RSSAR images, respectively. Based on the data acquisition geometry of the SS-RSSAR in [
17],
ρa0 can be estimated by
where
ψ and
Ba0 denotes the central squint angle and Doppler bandwidth with respect to the swath center, respectively. By assuming the beam width is
ϕa,
Ba0 can be estimated by
By substituting Equation (49) into Equation (48),
ρa0 can be rewritten as
By substituting Equation (50) into Equation (47) and replacing the carrier frequency
fc with
fc0 if the new PA technique is adopted, the sliding spotlight factor
η of the SSS-RSSAR can be set as
To ensure that all targets within the ROI can be fully illuminated, the minimum DAP
ta can be estimated as
By substituting Equations (1) and (51) into Equation (52),
ta can be rewritten as
4.5. Integrate Parameter Design Flow
Based on the above discussions, the steps of system parameter design for the SSS-RSSAR can be summarized as:
Step 1. Set the parameters of an observation task, including the 2D swaths (Wa and Wr) and 2D resolutions (ρa and ρr); Set the referential carrier frequency fc0.
Step 2. Choose a proper orbit for the data acquisition with the parameters including the orbit height H, platform velocity Vs and tilt angle θ; Find the SAR position at the central data acquisition time based on the perpendicular-to-BIS CBP; Compute the central look angle βc and the central slant range Rc0.
Step 3. Compute the sliding spotlight factor η based on Equation (51). Compute the DAP ta based on Equation (53). Compute the starting and ending SSS-RSSAR positions, denoted as Ps and Pe, within the DAP. Compute the along-orbit distance D between Ps and Pe. Compute the azimuth angles αs and αe for Ps and Pe, respectively.
Step 4. Compute the azimuth bandwidth of the wavenumber spectrum ΔKX based on Equation (41) by replacing α(−Na/2) and α(Na/2) with αs and αe, respectively. Compute the minimum azimuth sample number Namin based on (43). Set an azimuth sample number Na slightly higher than Namin. Compute the referential pulse interval PI0 based on Equation (44).
Step 5. Generate the non-uniform PI array by using the CVPI technique.
Step 6. Compute the maximum pulse width Tpmax based on Equation (40). Set a pulse interval Tp slightly lower than Tpmax. Compute the required referential chirp rate γ0 based on Equations (32) and (35). Compute the sampling rate Fs based on Equation (36). Compute the lower and upper limits for range sample number based on Equations (38) and (39), respectively. Set a range sample number Nr between these two limits.
Step 7. Compute the azimuth-dependent carrier frequency and chirp rate based on Equation (46).
The system parameter design flowchart for the SSS-RSSAR is shown in
Figure 7.
6. Simulation and Discussion
The presented approach is to be evaluated via a simulated X-band SSS-RSSAR. Within a 5 km × 10 km (range × azimuth) ROI, 25 targets are uniformly distributed as shown in
Figure 8. The expected resolutions are in 1.00 m × 1.31 m (range × azimuth). The key parameters used for the SSS-RSSAR simulation are listed in
Table 4, where the basic parameters are those initially set for the SSS-RSSAR observation task and the derived parameters are those calculated based on the discussions in
Section 4. No antenna weighting is used for the echo simulation.
Based on the simulation geometry and the basic parameters in
Table 4, the DAP of the simulated SSS-RSSAR ranges from −2.49 s to 2.49 s with the CBSR variation as shown in
Figure 9a. Based on the CBSR, the azimuth dependent PI array is generated as shown in
Figure 9b.
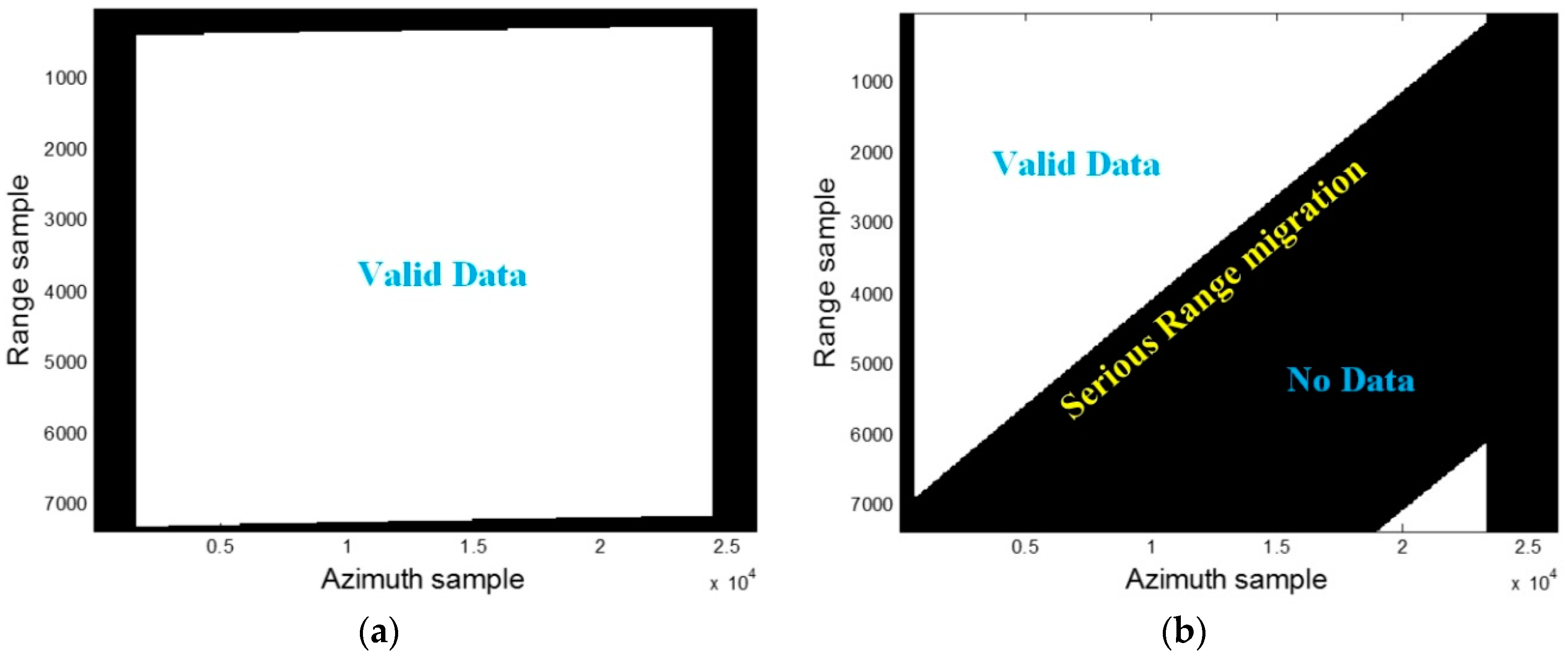
Figure 10a,b illustrate the echoes simulated by using and not using the CVPI technique. The while regions denote the valid data and the black regions denote no data. The constant PI used in generating
Figure 10b is 190.5 μs, equaling to the 13,074th PI. While large amounts of data are lost when using the constant PI because of the transmission blockage in
Figure 10b, the echo can be fully received with the CVPI technique as shown in
Figure 10a. It is known that the longer the pulse width, the more serious the transmission blockage will be. Thus, the shortage of using a constant PI tends to be more serious for the SSS-RSSAR because it prefers a long pulse width. As a result, the CVPI technique has been demonstrated to be necessary and effective for the data acquisition of the SSS-RSSAR.
Based on the new PA technique, the azimuth-dependent carrier frequency and chirp rate are shown in
Figure 11a,b, respectively.
Figure 12 compares the range wavenumber
KY when using and not using the new PA method. The red and blue lines denote the upper and lower limits of the range wavenumber spectrum and the green lines denote the upper and lower limits of range wavenumber of the valid data after the RVP removal.
Figure 12a denotes the case where the new PA technique is used. The maximum and minimum values of
KY almost overlap with
KYmax and
KYmin respectively, resulting in a range bandwidth of the wavenumber domain Δ
KY around 8.8 rad/m. Note that as this bandwidth is actually wider than the real range wavenumber bandwidth of the valid data Δ
KYs because the echoes of different targets have been aligned to the referential target (swath center) by the RVP removal manipulation. Based on Equations (19), (21) and (46), Δ
KYs can be estimated as
By substituting the parameters in
Table 4 into Equation (66), Δ
KYs is calculated as 6.28 rad/s, which is not to be altered by the range interpolation. Comparatively, in
Figure 11b where the carrier frequency and chirp rate always equal to their constant referential values
fc0 and
γ0, respectively, both the maximum and minimum values of
KY are characterized with large spatial varieties and the range bandwidth of the wavenumber domain Δ
KY is around 0.33 rad/m, much narrower than the range wavenumber bandwidth of the valid data Δ
KYs. For this case, Δ
KYs equals to Δ
KY.
The difference of the range wavenumber bandwidth of the valid data will lead to different range resolution performances as shown in
Figure 13, where the central swath target
T33 is adopted for the resolution inspection. For the case where the new PA technique is used in
Figure 13a, the range resolution of the focused image is 1.035 m. Comparatively, for the case where the traditional constant parameter strategy is used in
Figure 13b, the range resolution is 18.846 m, degraded by around 18.8 times. By noticing that that the range wavenumber bandwidth of the valid data achieved with the new PA technique is 18.8 times high than that without the new PA technique, we can conclude that the improvement of the range resolution performance is caused by the expansion of the range wavenumber bandwidth contributed by the new PA technique. By comparing
Figure 13a,b, we find the azimuth resolutions of the two cases are almost the same. This is because the azimuth samples corresponding to the beam dwell time of
T33 are within the region restricted by
A1 –
A2 in
Figure 12b. For the azimuth samples outside the
A1 –
A2 region, there would be no valid data after the range interpolation. Therefore, for the azimuth marginal targets such as
T11,
T31,
T51,
T15,
T35,
T55, etc., the azimuth resolutions would be degraded. Based on the results in
Figure 11,
Figure 12 and
Figure 13, the benefits of applying the new PA technique for the SSS-RSSAR data acquisition have been demonstrated.
To assess the effectiveness of the MPFA for the SSS-RSSAR imaging, the contour plots of amplitudes of the focused marginal targets
T11,
T13,
T15,
T31,
T33,
T35,
T51,
T53 and
T55 are inspected in
Figure 14. The new PA technique is employed in generating the transmitted pulses. The indicators for the focusing quality evaluation, including the peak side lobe ratio (PSLR), integrate side lobe ratio (ISLR) and resolution, are listed in
Table 5. The fact that for all the targets the PSLRs and ISLRs match well with their theoretical values, −10.26 dB and −9.8 dB, respectively, and that the measured resolutions match well with their expected performances in
Table 4, the validity of the MPFA in focusing the SSS-RSSAR data has been demonstrated. The slight inconsistency of the azimuth resolutions in
Table 5 is caused by the slight difference of the beam dwell time of different targets.
To demonstrate the advantages of the SSS-RSSAR over the traditional sliding spotlight SAR, the least required total sample numbers and the total computational load for imaging are shown in
Figure 15 and
Figure 16, respectively. The variation of the minimum total sample numbers of the SSS-RSSAR and the traditional SSS-SAR with respect to the range and azimuth swaths are shown in
Figure 15a,b. The inspected range swath ranges from 1 km to 10 km and the inspected azimuth swath ranges from 1 to 20 km. It is found that while for a smaller ROI swath the total sample number of the SSS-RSSAR is much lower than that of the traditional SSS-SAR, for a large ROI swath, however, there would be no obvious advantage of the SSS-RSSAR because a large swath will lead to wider range and azimuth bandwidths after the 2D dechirp and thus, larger sampling rates, both in range and in azimuth, are required, accompanied with more sample numbers. This also implies that the SSS-RSSAR is especially suitable for imaging a moderate-swath ROI tilted with the satellite track in a high resolution. Note that, as the total sample number of the SSS-RSSAR 6477 × 23,492 (range × azimuth), as shown in
Figure 15a, represents the least required number, the real total sample used for the simulation experiments is 7344 × 26,124 (range × azimuth), which turns to be higher than the least required value in observing the 5 km × 10 km (range × azimuth) tilted ROI.
The least required total computational loads when using the MPFA and other imaging algorithms, including the RDA, CSA and RMA, are compared in
Figure 16. Based on the discussion in
Section 5.2, while the computational loads of the RDA, CSA and RMA are calculated based on the least total sample number in
Figure 15b, the computational load of the MPFA is calculated based on the total sample number in
Figure 15a. For the simulated case, the total computational loads of the RDA, CSA and RMA are 93.5 GFLOP, 86.6 GFLOP and 91.8 GFLOP, respectively. Comparatively, the total computational load of the MPFA is only 50.9 GFLOP, much lower than all those of the RDA, CSA and RMA. The comparisons in
Figure 15 and
Figure 16 have demonstrated that, for a moderate swath, the SSS-RSSAR is superior to the traditional SSS-SAR by contributing to less total data amount and lighter computational load for the imaging processing. This is the very motivation of proposing the SSS-RSSAR in this paper.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}