Pressure Sensitivity Enhancement of Porous Carbon Electrode and Its Application in Self-Powered Mechanical Sensors



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
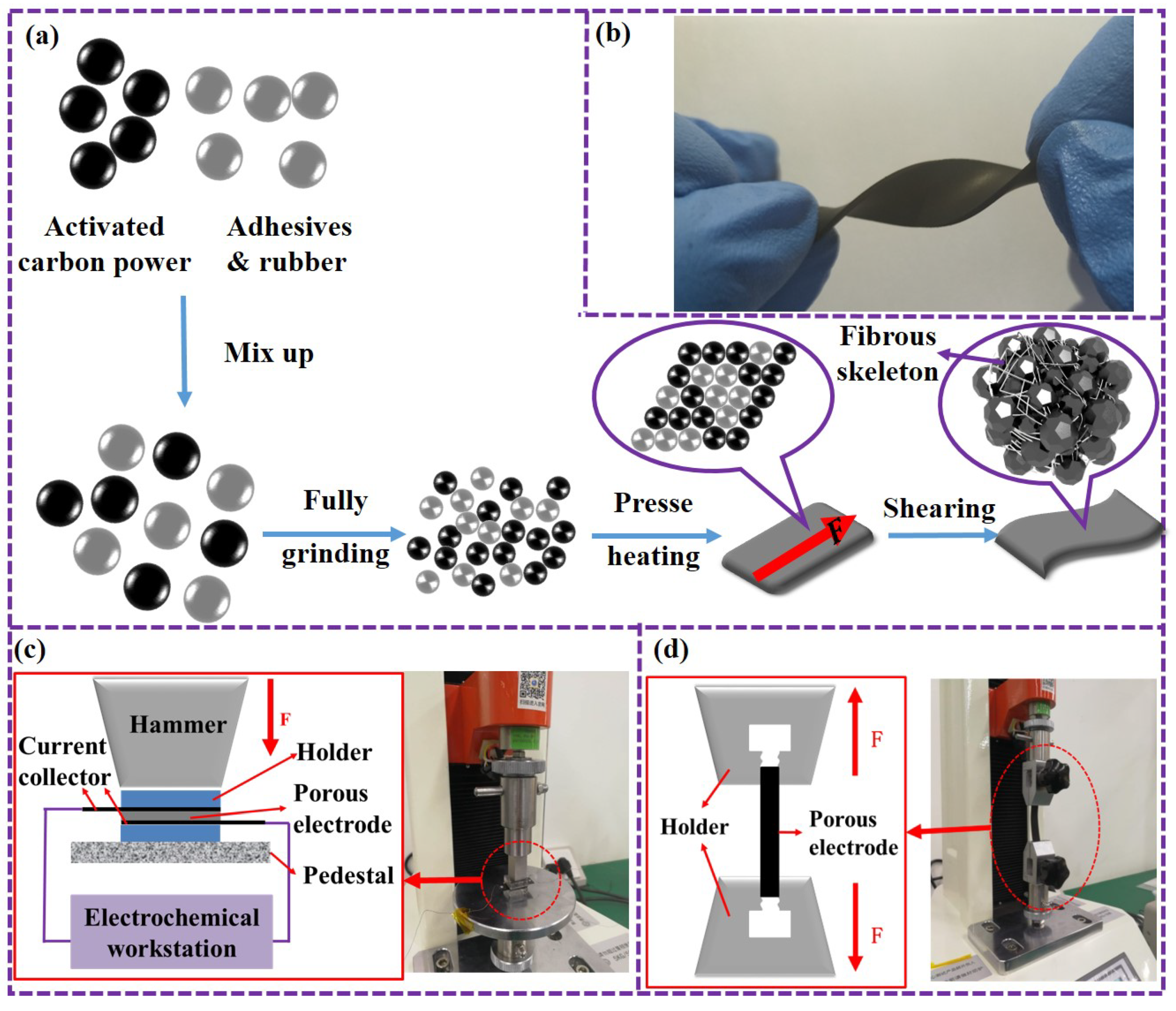
- Mix activated carbon powder and a binder powder (e.g., polytetrafluoroethylene and rubber) evenly by concussion and grinding. The mass ratio of the activated carbon powder and the binder powder is 85:15.
- The mixed powder is lightly pressed under high temperature heating (150–180 ) to form a film.
- A shearing force is applied along the surface of the film, and the elastic binder and rubber component in the film are stretched. A micro-networked structure is formed, which has an envelope effect on the activated carbon micro-particles.
3. Results
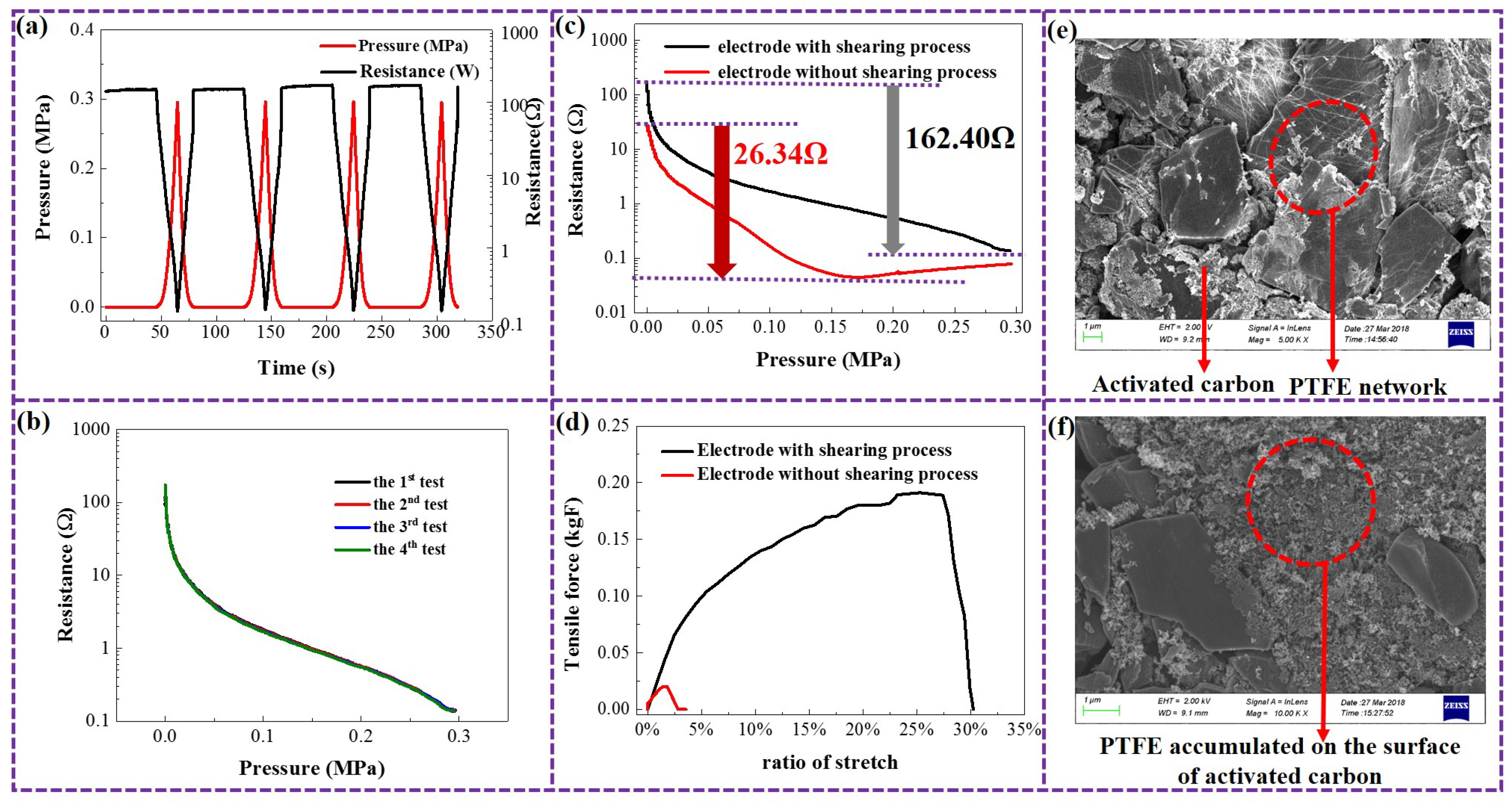
3.1. Pressure Sensitivity Enhancement of the Porous Electrode by Shearing
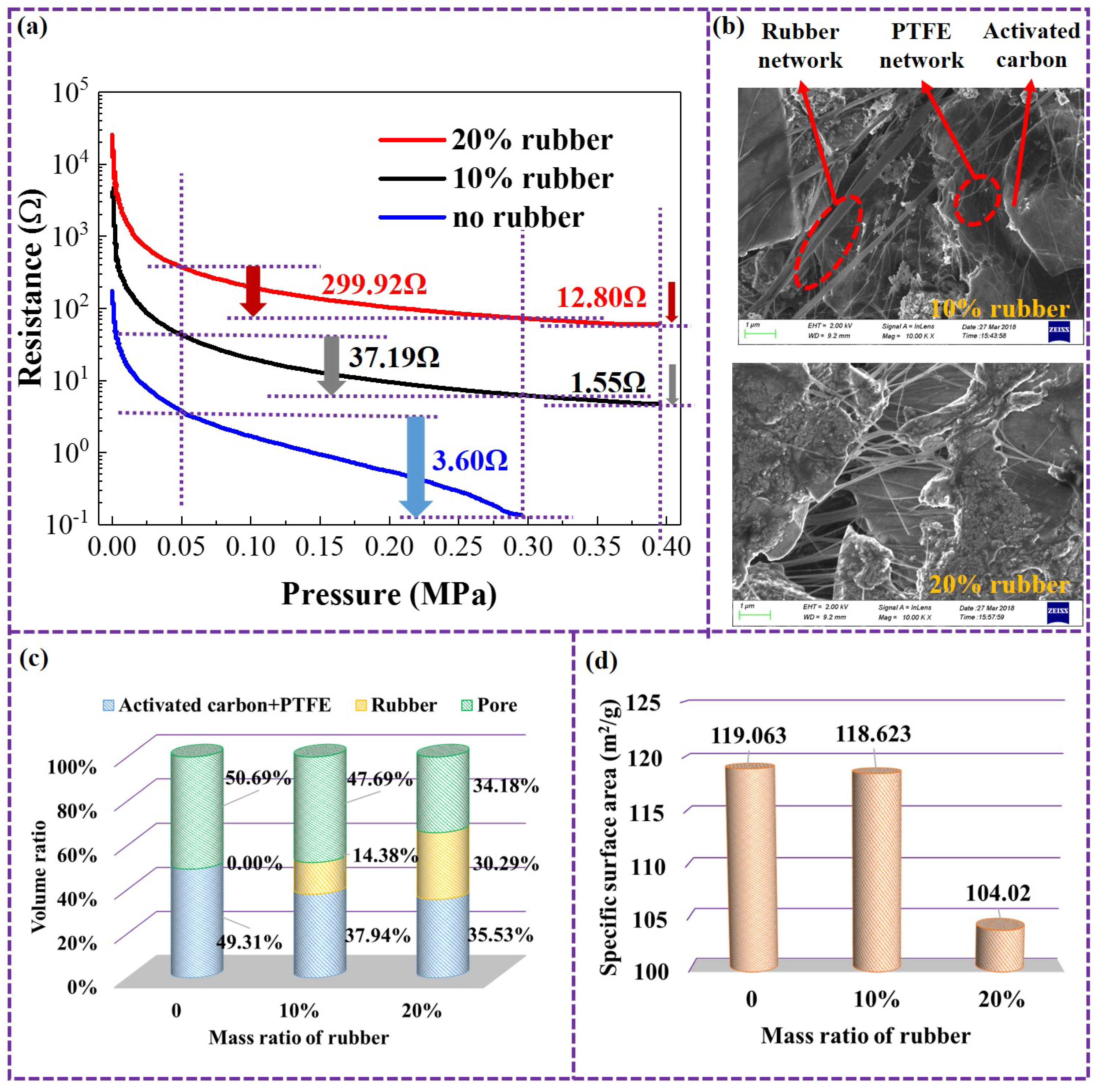
3.2. Pressure Sensitivity Enhancement of the Porous Electrode by the Rubber Component
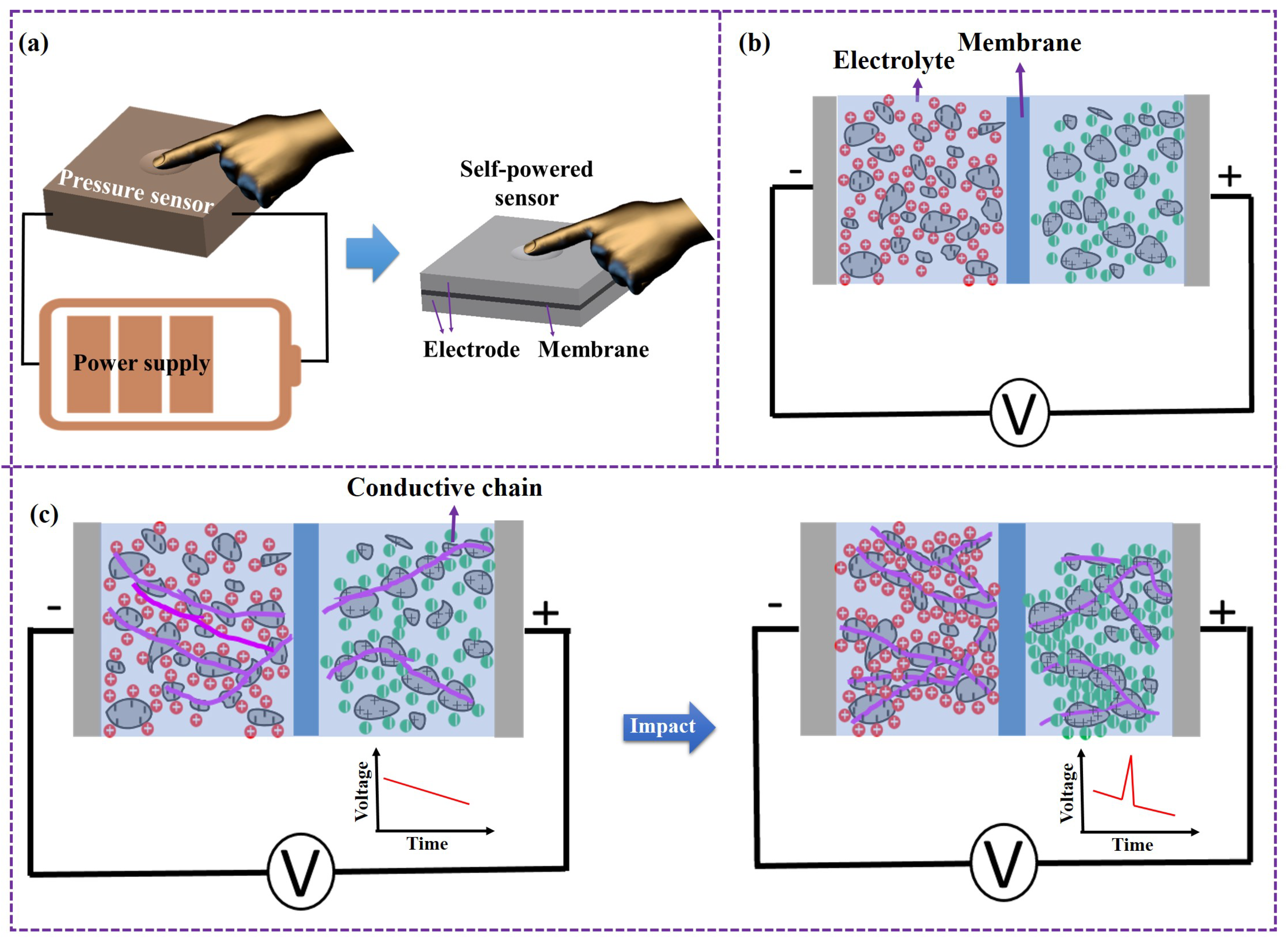
3.3. Performance of Applications in Self-Powered Mechanical Sensors
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, Z.L. Self-powered nanosensors and nanosystems. Adv. Mater. 2012, 24, 280–285. [Google Scholar] [CrossRef] [PubMed]
- Lin, L.; Xie, Y.; Wang, S.; Wu, W.; Niu, S.; Wen, X.; Wang, Z.L. Triboelectric active sensor array for self-powered static and dynamic pressure detection and tactile imaging. ACS Nano 2013, 7, 8266–8274. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.H.; Yoon, H.J.; Kim, T.Y.; Gupta, M.K.; Lee, J.H.; Seung, W.; Ryu, H.; Kim, S.W. Micropatterned P (VDF-TrFE) Film-Based Piezoelectric Nanogenerators for Highly Sensitive Self-Powered Pressure Sensors. Adv. Funct. Mater. 2015, 25, 3203–3209. [Google Scholar] [CrossRef]
- Dai, K.; Wang, X.; Yi, F.; Jiang, C.; Li, R.; You, Z. Triboelectric nanogenerators as self-powered acceleration sensor under high-g impact. Nano Energy 2018, 45, 84–93. [Google Scholar] [CrossRef]
- Wang, S.; Lin, L.; Wang, Z.L. Triboelectric nanogenerators as self-powered active sensors. Nano Energy 2015, 11, 436–462. [Google Scholar] [CrossRef] [Green Version]
- Ma, M.; Zhang, Z.; Liao, Q.; Yi, F.; Han, L.; Zhang, G.; Liu, S.; Liao, X.; Zhang, Y. Self-powered artificial electronic skin for high-resolution pressure sensing. Nano Energy 2017, 32, 389–396. [Google Scholar] [CrossRef]
- Zhou, Y.; He, J.; Wang, H.; Qi, K.; Nan, N.; You, X.; Shao, W.; Wang, L.; Ding, B.; Cui, S. Highly sensitive, self-powered and wearable electronic skin based on pressure-sensitive nanofiber woven fabric sensor. Sci. Rep. 2017, 7, 12949. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Xu, J.; Wang, W.; Wang, G.J.N.; Rastak, R.; Molinalopez, F.; Chung, J.W.; Niu, S.; Feig, V.R.; Lopez, J. Skin electronics from scalable fabrication of an intrinsically stretchable transistor array. Nature 2018, 555. [Google Scholar] [CrossRef]
- Narasimhan, V.; Li, H.; Jianmin, M. Micromachined high-g accelerometers: A review. J. Micromech. Microeng. 2015, 25, 033001. [Google Scholar] [CrossRef]
- Akiyama, M.; Morofuji, Y.; Kamohara, T.; Nishikubo, K.; Tsubai, M.; Fukuda, O.; Ueno, N. Flexible piezoelectric pressure sensors using oriented aluminum nitride thin films prepared on polyethylene terephthalate films. J. Appl. Phys. 2006, 100, 114318. [Google Scholar] [CrossRef]
- Mortet, V.; Petersen, R.; Haenen, K.; D’Olieslaeger, M. Wide range pressure sensor based on a piezoelectric bimorph microcantilever. Appl. Phys. Lett. 2006, 88, 133511. [Google Scholar] [CrossRef]
- De Reus, R.; Gulløv, J.O.; Scheeper, P.R. Fabrication and characterization of a piezoelectric accelerometer. J. Micromech. Microeng. 1999, 9, 123. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, H.; Jeong, C.K. Biomimetic Porifera Skeletal Structure of Lead-Free Piezocomposite Energy Harvesters. ACS Appl. Mater. Interfaces 2018, 10, 35539–35546. [Google Scholar] [CrossRef] [PubMed]
- Chun, J.; Kim, J.W.; Jung, W.S.; Kang, C.Y.; Kim, S.W.; Wang, Z.L.; Baik, J.M. Mesoporous pores impregnated with Au nanoparticles as effective dielectrics for enhancing triboelectric nanogenerator performance in harsh environments. ACS Appl. Mater. Interfaces 2015, 8, 3006–3012. [Google Scholar] [CrossRef]
- Zhang, B.; Shi, G. Mechanical Filtering for Target Recognition of Hard Target Penetration. J. Detect. Control 2010, 32, 25–29. [Google Scholar]
- Wang, J.; Rong, L.I.; Huang, H. Layer Penetrating Adhesion Signal Characteristic Extractting Based on Wavelet Coefficients. J. Detect. Control 2016, 38, 13–17. [Google Scholar]
- Kang, I.; Schulz, M.J.; Kim, J.H.; Shanov, V.; Shi, D. A carbon nanotube strain sensor for structural health monitoring. Smart Mater. Struct. 2006, 15, 737. [Google Scholar] [CrossRef]
- Song, Y.; Chen, H.; Su, Z.; Chen, X.; Miao, L.; Zhang, J.; Cheng, X.; Zhang, H. Highly Compressible Integrated Supercapacitor–Piezoresistance-Sensor System with CNT–PDMS Sponge for Health Monitoring. Small 2017, 13, 1702091. [Google Scholar] [CrossRef]
- Dai, K.; Wang, X.; Yin, Y.; Hao, C.; You, Z. Voltage Fluctuation in a Supercapacitor During a High-g Impact. Sci. Rep. 2016, 6, 38794. [Google Scholar] [CrossRef] [Green Version]
- Dai, K.; Wang, X.; Yi, F.; Yin, Y.; Jiang, C.; Niu, S.; Li, Q.; You, Z. Discharge voltage behavior of electric double-layer capacitors during high-g impact and their application to autonomously sensing high-g accelerometers. Nano Res. 2018, 11, 1146–1156. [Google Scholar] [CrossRef]
- Dai, K.; Wang, X.; Li, R.; Zhang, H.; You, Z. Theoretical study and applications of self-sensing supercapacitors under extreme mechanical effects. Extreme Mech. Lett. 2019, 26, 53–60. [Google Scholar] [CrossRef]
- Hou, C.; Liu, Y.T.; Yang, X. Penetrating Hard Target Weapons and the Key Technology Research of Its Smart Fuse. Aero Weapon. 2012, 2, 44–48. [Google Scholar]
- Wang, H.; Pilon, L. Accurate Simulations of Electric Double Layer Capacitance of Ultramicroelectrodes. J. Phys. Chem. C 2011, 115, 16711–16719. [Google Scholar] [CrossRef]
- McLachlan, D.S.; Blaszkiewicz, M.; Newnham, R.E. Electrical Resistivity of Composites. J. Am. Ceram. Soc. 1990, 73, 2187–2203. [Google Scholar] [CrossRef]
- Lin, C.; Ritter, J.A.; Popov, B.N.; White, R.E. A Mathematical Model of an Electrochemical Capacitor with Double-Layer and Faradaic Processes. J. Electrochem. Soc. 1999, 146, 3168–3175. [Google Scholar] [CrossRef] [Green Version]
- Dong, L. Study on Signal Acquisition Echnology of Multi-Layer Penetration Overloads. Master’s Thesis, North University of China, Taiyuan, China, 2013. [Google Scholar]





© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, K.; Wang, X.; You, Z.; Zhang, H. Pressure Sensitivity Enhancement of Porous Carbon Electrode and Its Application in Self-Powered Mechanical Sensors. Micromachines 2019, 10, 58. https://doi.org/10.3390/mi10010058
Dai K, Wang X, You Z, Zhang H. Pressure Sensitivity Enhancement of Porous Carbon Electrode and Its Application in Self-Powered Mechanical Sensors. Micromachines. 2019; 10(1):58. https://doi.org/10.3390/mi10010058
Chicago/Turabian StyleDai, Keren, Xiaofeng Wang, Zheng You, and He Zhang. 2019. "Pressure Sensitivity Enhancement of Porous Carbon Electrode and Its Application in Self-Powered Mechanical Sensors" Micromachines 10, no. 1: 58. https://doi.org/10.3390/mi10010058
APA StyleDai, K., Wang, X., You, Z., & Zhang, H. (2019). Pressure Sensitivity Enhancement of Porous Carbon Electrode and Its Application in Self-Powered Mechanical Sensors. Micromachines, 10(1), 58. https://doi.org/10.3390/mi10010058