The Actuation Mechanism of 3D Printed Flexure-Based Robotic Microtweezers


Abstract
:1. Introduction
2. Materials and Methods
2.1. The Material for 3D Printing
2.2. Piezo Basic Characterization
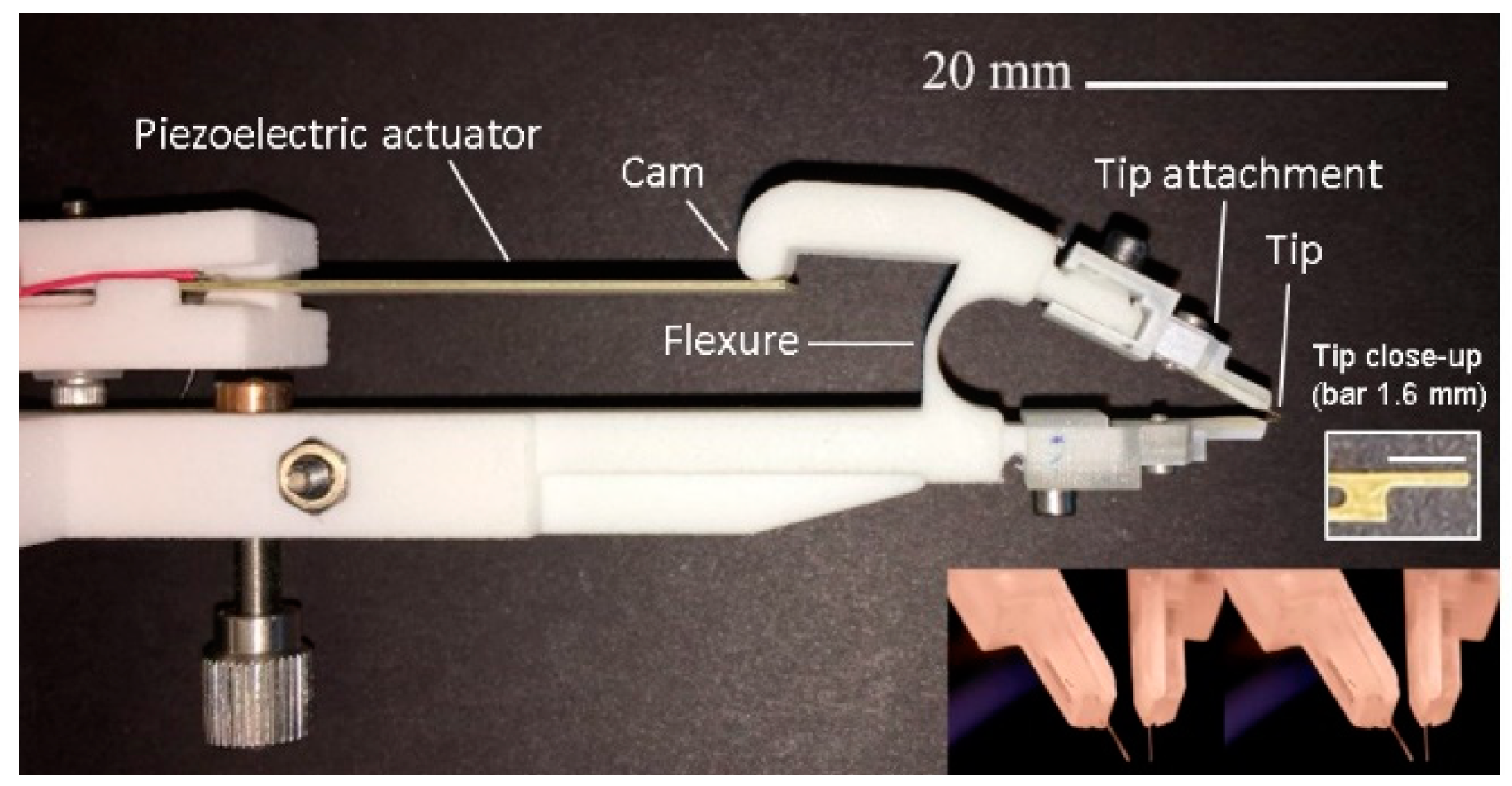
2.3. Design of the Actuation Mechanism
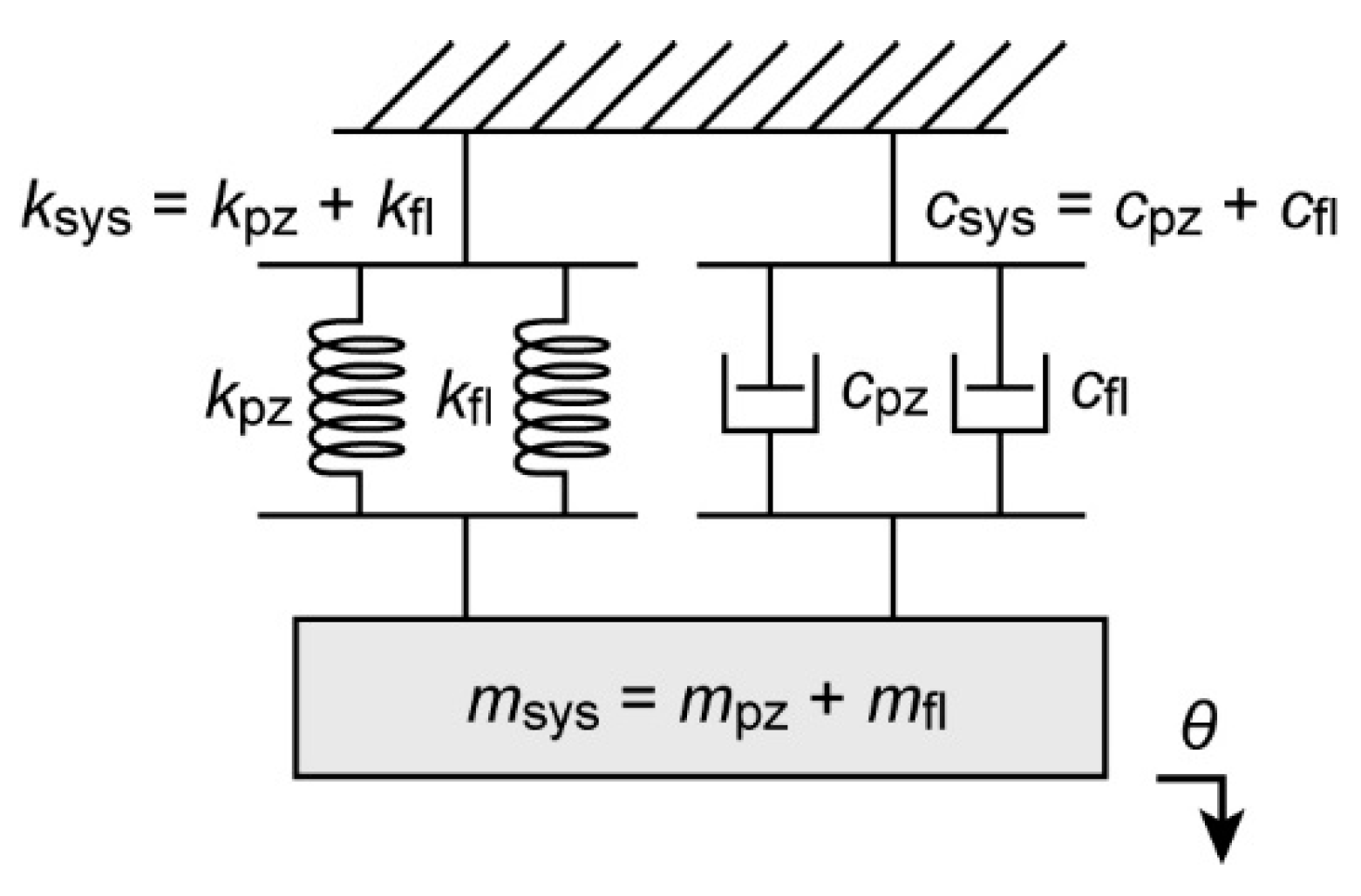
2.4. System Design
3. Results
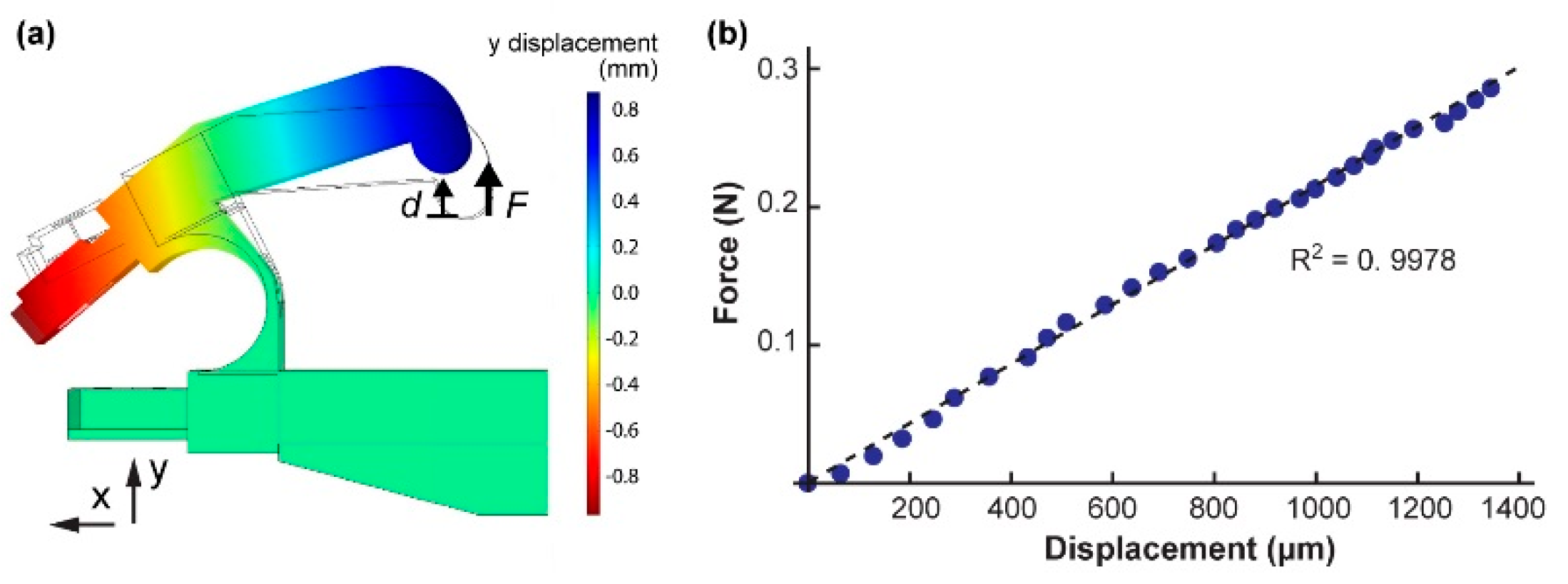
3.1. Comparison of Computational and Experimental Models
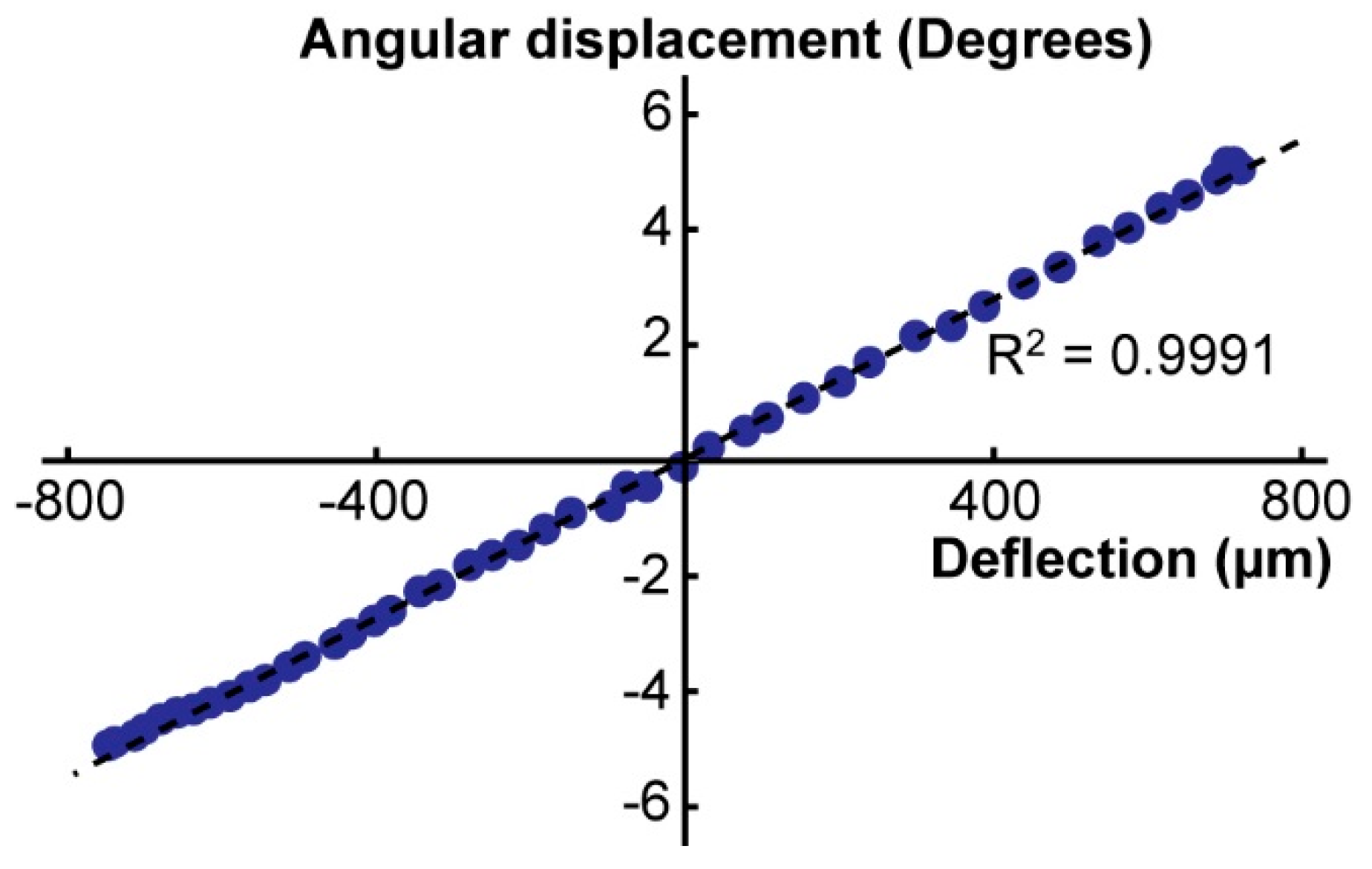
3.2. System Performance
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Sitti, M.; Hashimoto, H. Controlled pushing of nanoparticles: modeling and experiments. IEEE/ASME Trans. Mechatron. 2000, 5, 199–211. [Google Scholar] [CrossRef]
- Hou, J.; Liu, L.Q.; Wang, Z.Y.; Wang, Z.D.; Xi, N.; Wang, Y.C.; Wu, C.D.; Dong, Z.L.; Yuan, S.A. AFM-based robotic nano-hand for stable manipulation at nanoscale. IEEE Trans. Autom. Sci. Eng. 2012, 10, 285–295. [Google Scholar] [CrossRef]
- Chen, H.; Sun, D. Moving groups of microparticles into array with a robot–tweezers manipulation system. IEEE Trans. Robot. 2012, 28, 1069–1080. [Google Scholar] [CrossRef]
- Kim, K.; Liu, X.Y.; Zhang, Y.; Sun, Y. Nanonewton force-controlled manipulation of biological cells using a monolithic MEMS microgripper with two-axis force feedback. J. Micromech. Microeng. 2008, 18, 055013. [Google Scholar] [CrossRef]
- Chronis, N.; Lee, L.P. Electrothermally activated SU-8 microgripper for single cell manipulation in solution. J. Microelectromech. Syst. 2005, 14, 857–863. [Google Scholar] [CrossRef]
- Boudaoud, M.; Regnier, S. An overview on gripping force measurement at the micro and nano-scales using two-fingered microrobotic systems. Int. J. Adv. Robot. Syst. 2014, 11, 45. [Google Scholar] [CrossRef]
- Tanner, L. FDA Takes Fresh Look at Robotic Surgery. Available online: https://www.usatoday.com/story/news/nation/2013/04/09/robot-surgery-fda/2067629 (accessed on 26 February 2018).
- Kang, S.W.; Lee, C.C.; Lee, S.H.; Lee, K.Y.; Jeonq, J.J.; Lee, Y.S.; Nam, K.H.; Chanq, H.S.; Chunq, W.Y.; Park, C.S. Robotic thyroid surgery using a gasless, transaxillary approach and the da Vinci S system: the operative outcomes of 338 consecutive patients. Surgery 2009, 146, 1048–1055. [Google Scholar] [CrossRef] [PubMed]
- Kakeji, Y.; Konishi, K.; Leiri, S.; Yasunaqa, T.; Nakamoto, M.; Tanoue, K.; Baba, H.; Maehare, Y.; Hashizume, M. Robotic laparoscopic distal gastrectomy: a comparison of the da Vinci and Zeus systems. Int. J. Med. Robot. Comput. Assist. Surg. 2006, 2, 299–304. [Google Scholar] [CrossRef] [PubMed]
- Camarillo, D.B.; Krummel, T.M.; Salisbury, J.K. Robotic technology in surgery: past, present, and future. Am. J. Surg. 2004, 188, 2–15. [Google Scholar] [CrossRef] [PubMed]
- Ramadan, A.A.; Tomohito, T.; Mae, Y.; Oohara, K.; Arai, T. Developmental process of a chopstick-like hybrid-structure two-fingered micromanipulator hand for 3-D manipulation of microscopic objects. IEEE Trans. Ind. Electron. 2009, 56, 1121–1135. [Google Scholar] [CrossRef]
- Shelyakov, A.V.; SitinKov, N.N.; Koledov, V.V.; Kuchin, D.S.; Irzhak, A.I.; Tabachkova, N.Y. Melt-spun thin ribbons of shape memory TiNiCu alloy for micromechanical applications. Int. J. Smart Nano Mater. 2011, 2, 68–77. [Google Scholar] [CrossRef]
- Velazquez, R.; Pissaloux, E.; Hafez, M.; Szewczyk, J. low-cost highly-portable tactile display based on shape memory alloy micro-actuators. In Virtual Environments, Human-Computer Interfaces and Measurement Systems, Proceedings of the 2005 IEEE International Conference, VECIMS 2005, Messina, Italy, 18–20 July 2005; IEEE: Piscatvi, NJ, USA, 2006. [Google Scholar]
- Alogla, A.F.; Amalou, F.; Balmer, C.; Scanlan, P.; Shu, W.; Reuben, R.L. Micro-tweezers: Design, fabrication, simulation and testing of a pneumatically actuated micro-gripper for micromanipulation and microtactile sensing. Sens. Actuators A Phys. 2015, 236, 394–404. [Google Scholar] [CrossRef] [Green Version]
- Fiaz, H.S.; Settle, C.R.; Hoshino, K. Metal additive manufacturing for microelectromechanical systems: Titanium alloy (Ti-6Al-4V)-based nanopositioning flexure fabricated by electron beam melting. Sens. Actuators A Phys. 2016, 249, 284–293. [Google Scholar] [CrossRef]
- Wei, H.X.; Wang, L.; Niu, X.D.; Zhang, J.; Simeono, A. Fabrication, Experiments, and Analysis of an LBM Additive-Manufactured Flexure Parallel Mechanism. Micromachines 2018, 9, 572. [Google Scholar] [CrossRef] [PubMed]
- Parthasarathy, J.; Starly, B.; Raman, S.; Christensen, A. Mechanical evaluation of porous titanium (Ti6Al4V) structures with electron beam melting (EBM). J. Mech. Behav. Biomed. Mater. 2010, 3, 249–259. [Google Scholar] [CrossRef] [PubMed]
- Zhao, S.; Li, S.J.; Hou, W.T.; Hao, Y.L.; Yang, R.; Murr, L.E. Microstructure and mechanical properties of open cellular Ti–6Al–4V prototypes fabricated by electron beam melting for biomedical applications. Mater. Technol. 2016, 31, 98–107. [Google Scholar] [CrossRef]
- Zhang, J.X.; Hoshino, K. Molecular Sensors and Nanodevices: Principles, Designs and Applications in Biomedical Engineering; Academic Press: Cambridge, MA, USA, 2013. [Google Scholar]
- Avitabile, P. Numerical Evaluation of Displacement and Acceleration for A Mass, Spring, Dashpot System. In Proceedings of the 2004 American Society for Engineering Annual Conference & Exposition, Salt Lake City, UT, USA, 20–23 June 2004. [Google Scholar]
- Michałowski, M.; Łuczak, S. AFM cantilevers with spherical tip of millimeter size. J. Micromechan. Microeng. 2018, 29, 017002. [Google Scholar] [CrossRef]
- Jaiswal, D.; Cowley, N.; Bian, Z.; Zheng, G.; Claffey, K.P.; Hoshino, K. Stiffness analysis of 3D spheroids using microtweezers. PLoS ONE 2017, 12, e0188346. [Google Scholar] [CrossRef] [PubMed]
- Jaiswal, D.; Moscato, Z.; Tomizawa, Y.; Claffey, K.P.; Hoshino, K. Elastography of multicellular spheroids using 3D light microscopy. Biomed. Opt. Express 2019, 10, 2409–2418. [Google Scholar] [CrossRef] [PubMed]
- Tomizawa, Y.; Dixit, K.; Daggett, D.; Hoshino, K. Biocompatible Cantilevers for Mechanical Characterization of Zebrafish Embryos using Image Analysis. Sensors 2019, 19, 1506. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design | l (mm) | h (mm) | t1 (mm) | t2 (mm) |
|---|---|---|---|---|
| #1 | 30.2 | 5.11 | 0.806 | 0.576 |
| #2 | 29.9 | 5.11 | 0.879 | 0.649 |
| #3 | 29.8 | 5.12 | 0.944 | 0.714 |
| #4 | 40.0 | 5.14 | 1.00 | 0.774 |
| #5 | 40.2 | 5.14 | 1.07 | 0.840 |
| #6 | 40.3 | 5.12 | 1.13 | 0.901 |
| Design | k (N/m) | E1 (MPa) | E2 (MPa) | Expected E (MPa) |
|---|---|---|---|---|
| #1 | 15.7 | 623 | 1,700 | 1,700 |
| #2 | 20.6 | 637 | 1,600 | 1,700 |
| #3 | 30.4 | 714 | 1,650 | 1,700 |
| #4 | 39.0 | 796 | 1,730 | 1,700 |
| #5 | 55.9 | 961 | 1,990 | 1,700 |
| #6 | 65.6 | 961 | 1,910 | 1,700 |
| Design | f (Hz) | τ | ρ (g/cm3) |
|---|---|---|---|
| #1 | 143 | 2047.8 | 0.584 |
| #2 | 193 | 1909.4 | 0.586 |
| #3 | 239 | 1447.2 | 1.25 |
| #4 | 77 | 4384.2 | 0.866 |
| #5 | 90.9 | 2727.3 | 0.875 |
| #6 | 127 | 2335.2 | 0.866 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Almeida, A.; Andrews, G.; Jaiswal, D.; Hoshino, K. The Actuation Mechanism of 3D Printed Flexure-Based Robotic Microtweezers. Micromachines 2019, 10, 470. https://doi.org/10.3390/mi10070470
Almeida A, Andrews G, Jaiswal D, Hoshino K. The Actuation Mechanism of 3D Printed Flexure-Based Robotic Microtweezers. Micromachines. 2019; 10(7):470. https://doi.org/10.3390/mi10070470
Chicago/Turabian StyleAlmeida, Alexander, George Andrews, Devina Jaiswal, and Kazunori Hoshino. 2019. "The Actuation Mechanism of 3D Printed Flexure-Based Robotic Microtweezers" Micromachines 10, no. 7: 470. https://doi.org/10.3390/mi10070470
APA StyleAlmeida, A., Andrews, G., Jaiswal, D., & Hoshino, K. (2019). The Actuation Mechanism of 3D Printed Flexure-Based Robotic Microtweezers. Micromachines, 10(7), 470. https://doi.org/10.3390/mi10070470