Modal Coupling Effect in a Novel Nonlinear Micromechanical Resonator

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
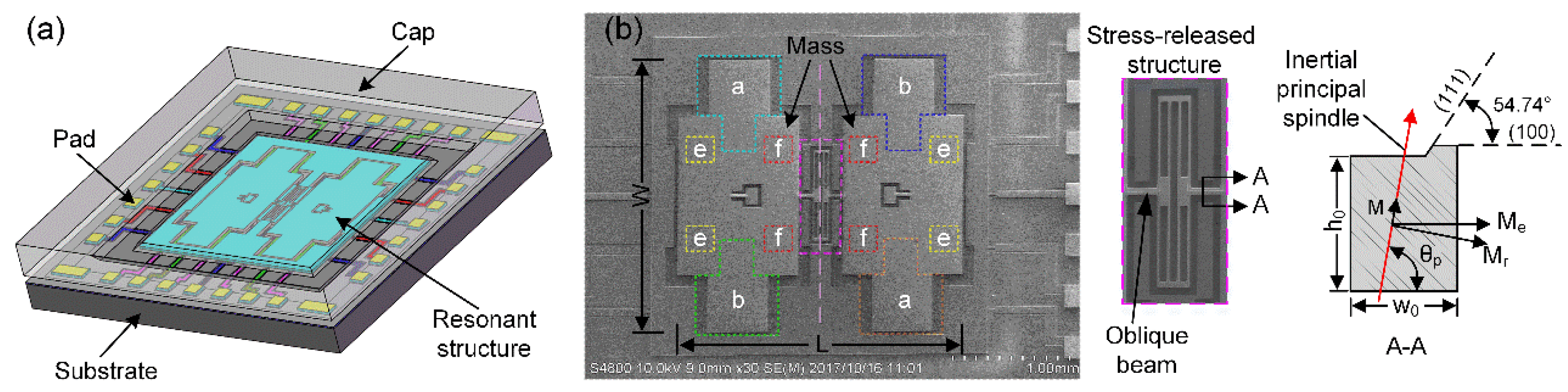
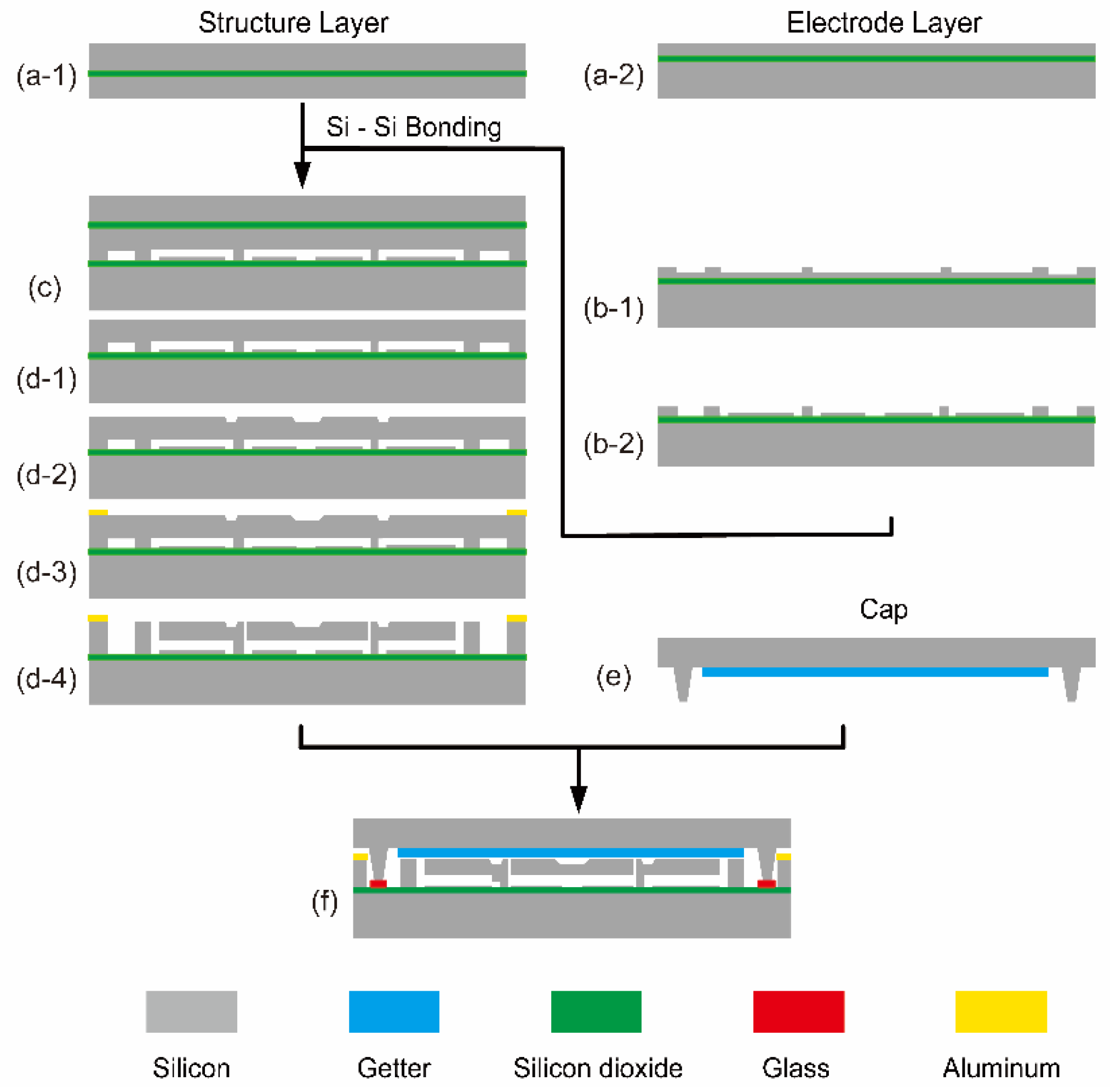
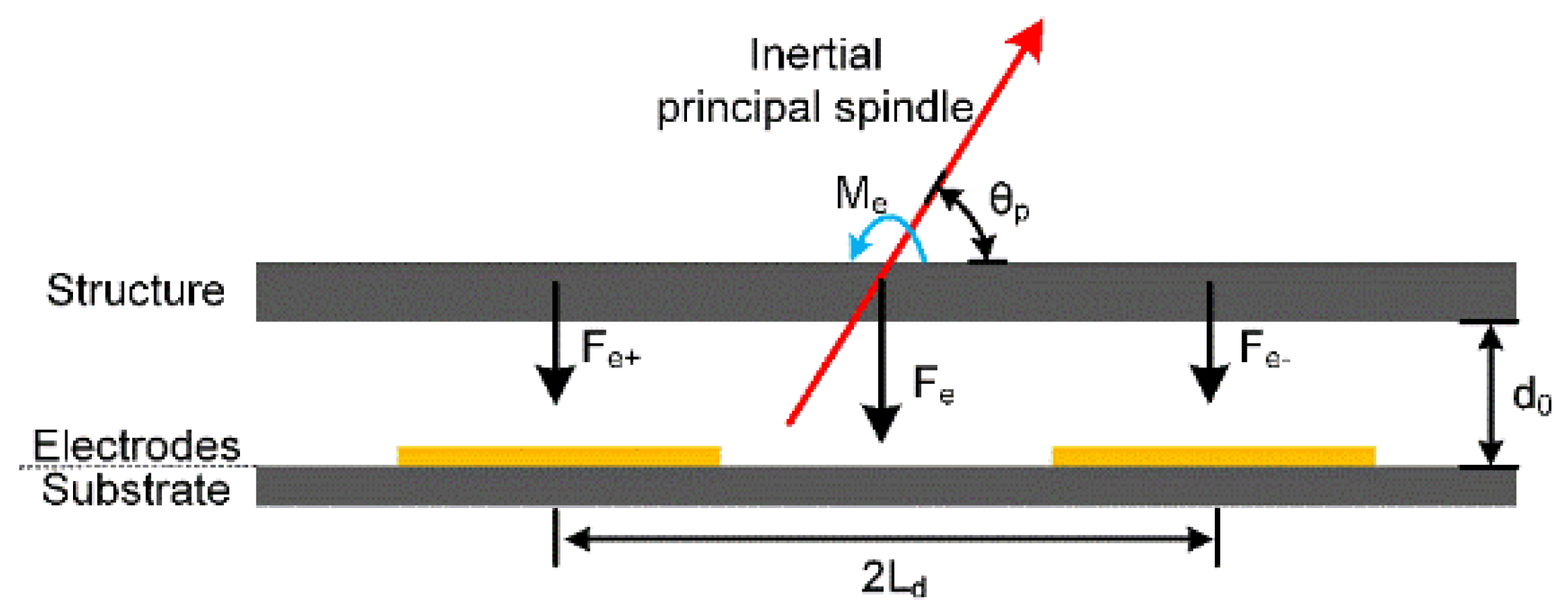
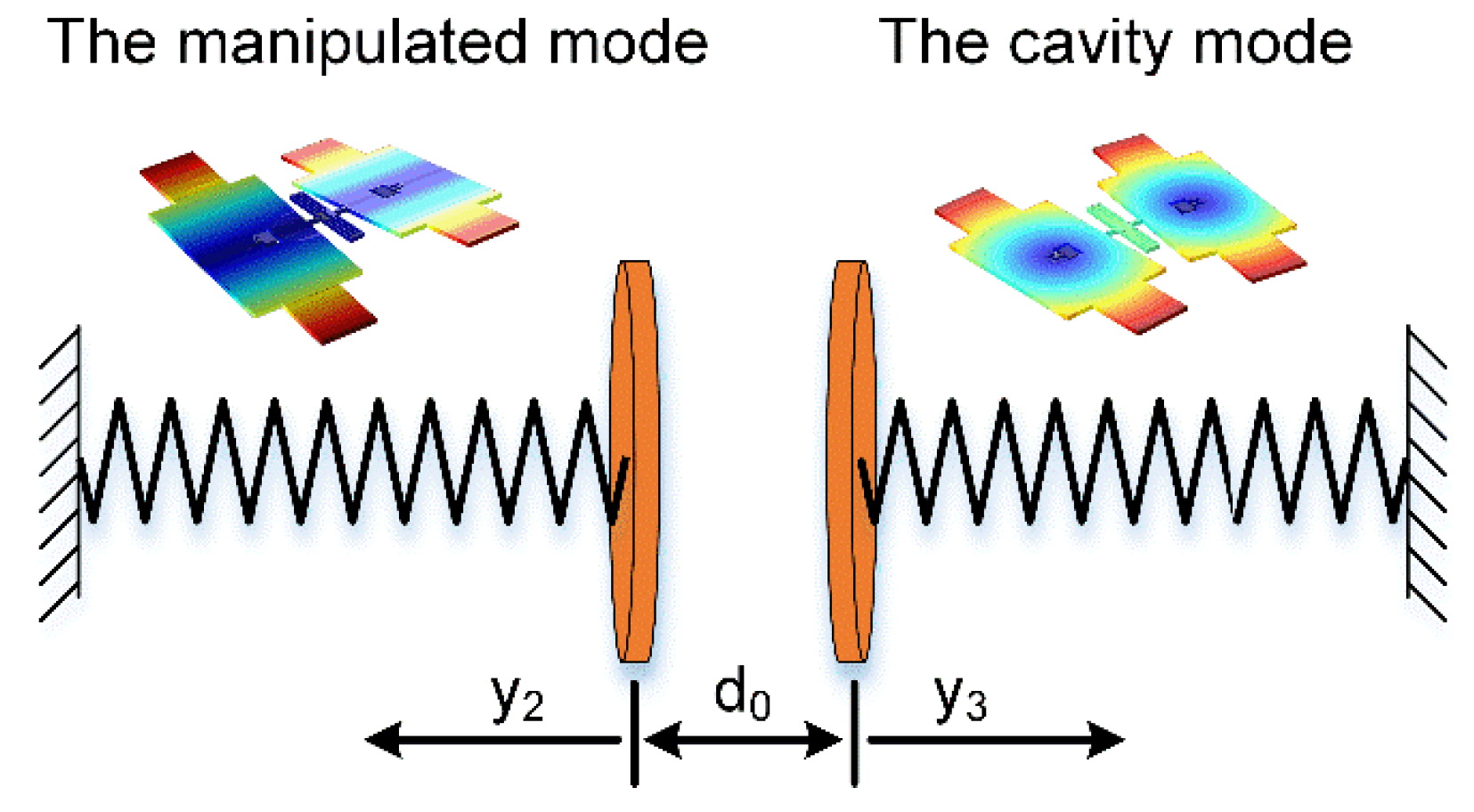
2.1. Structure Description
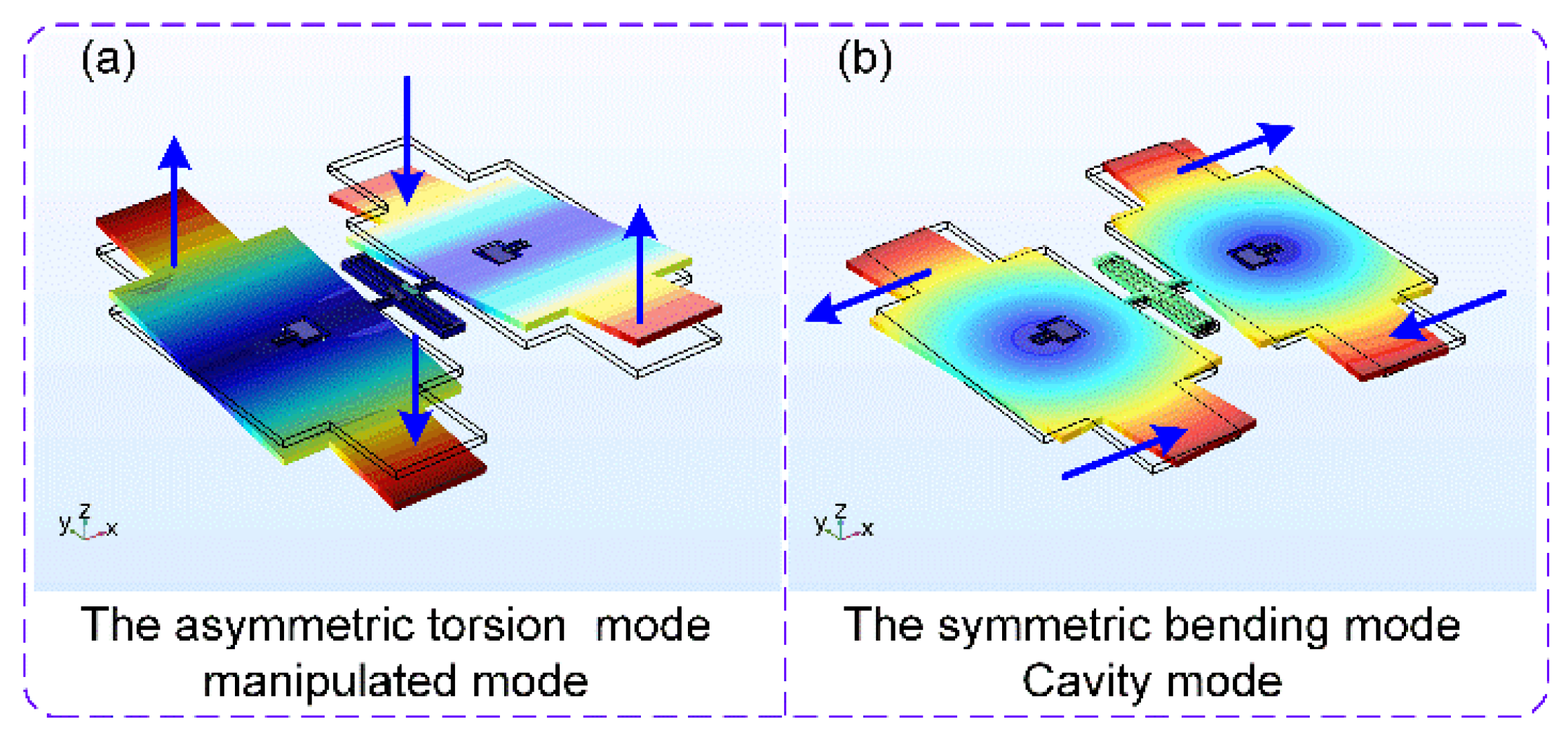
2.2. Modal Simulation
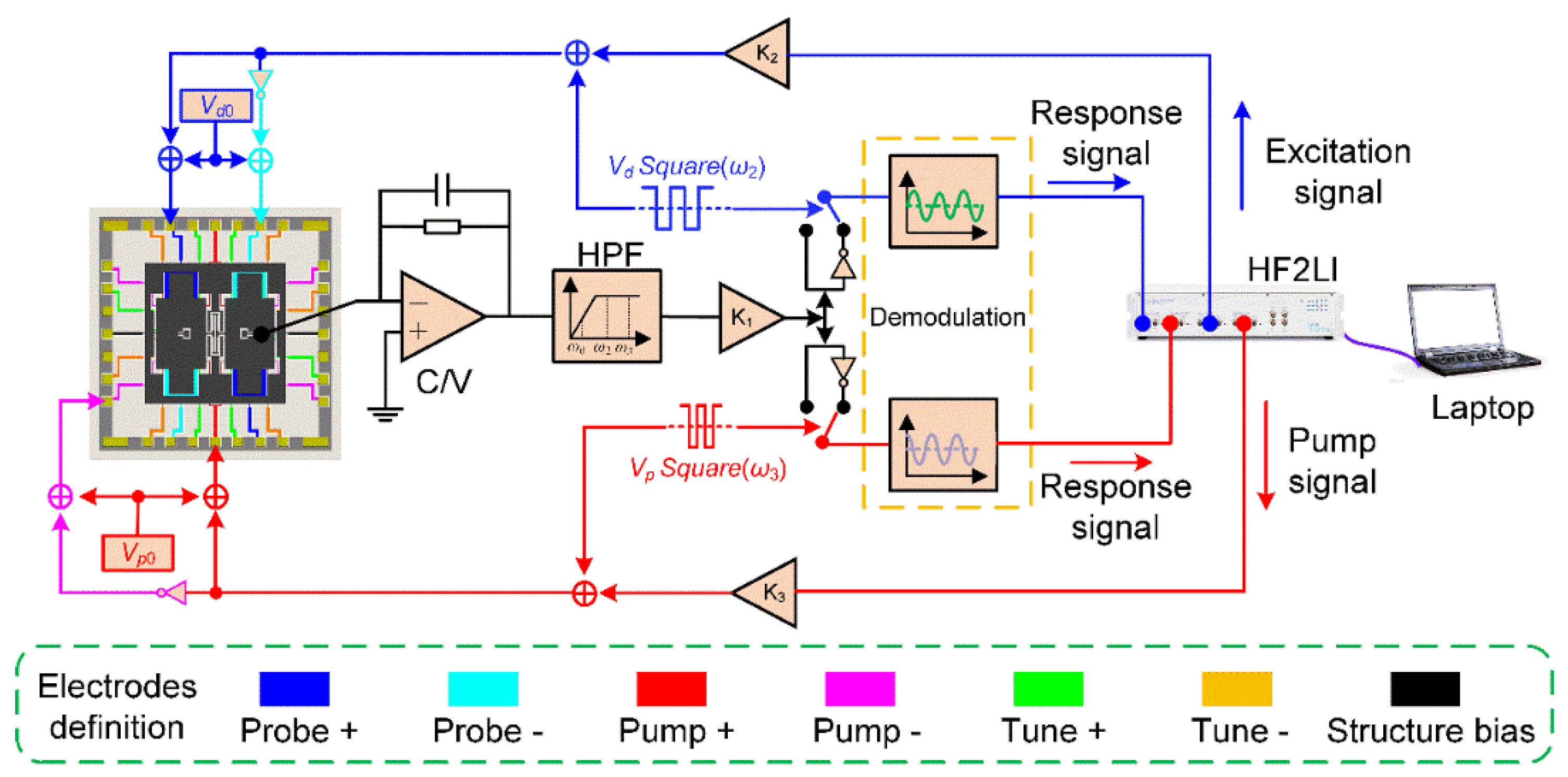
2.3. Controlling Circuits
3. Nonlinear and Modal Coupling Theory
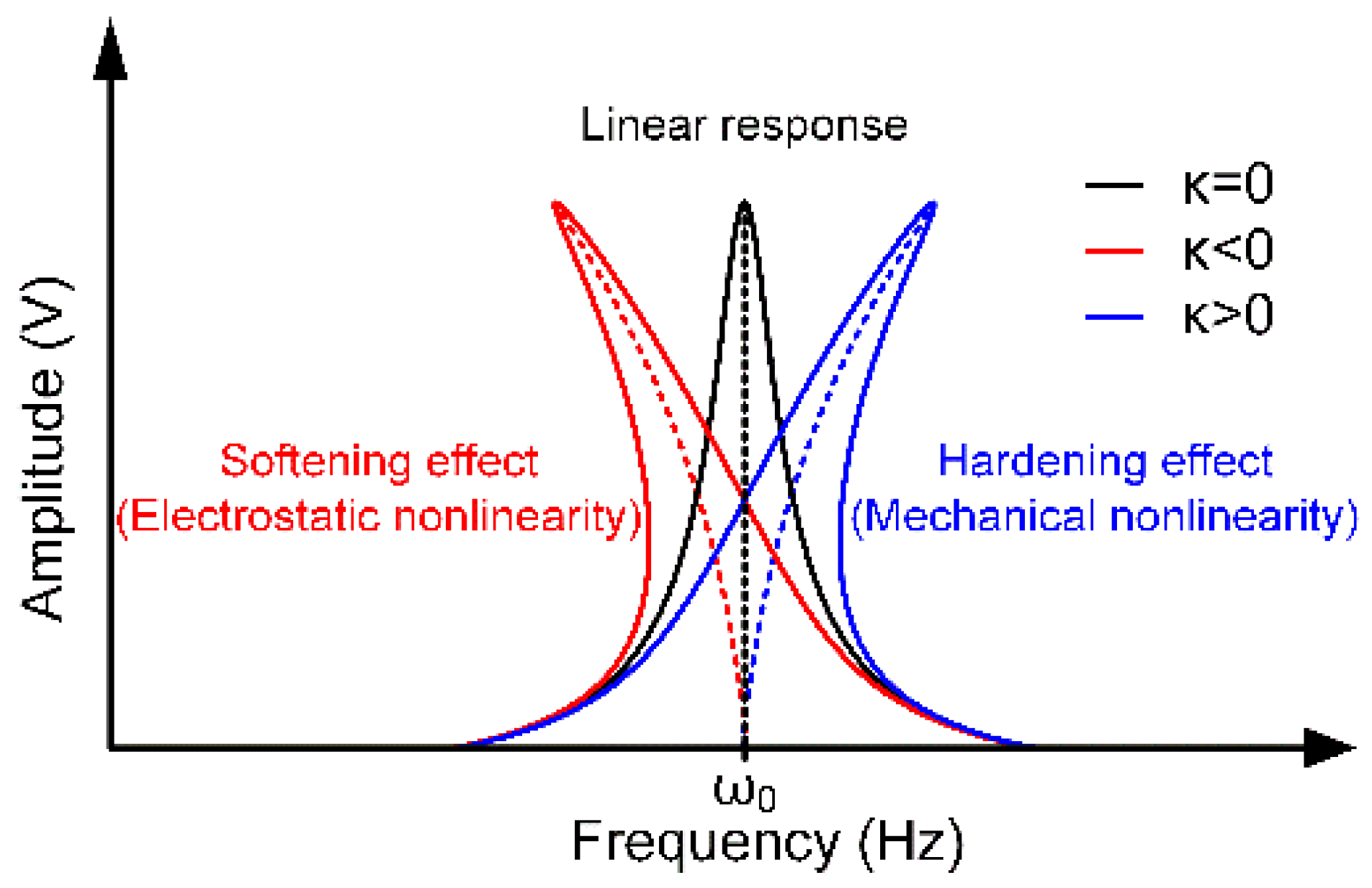
3.1. Nonlinear Effect
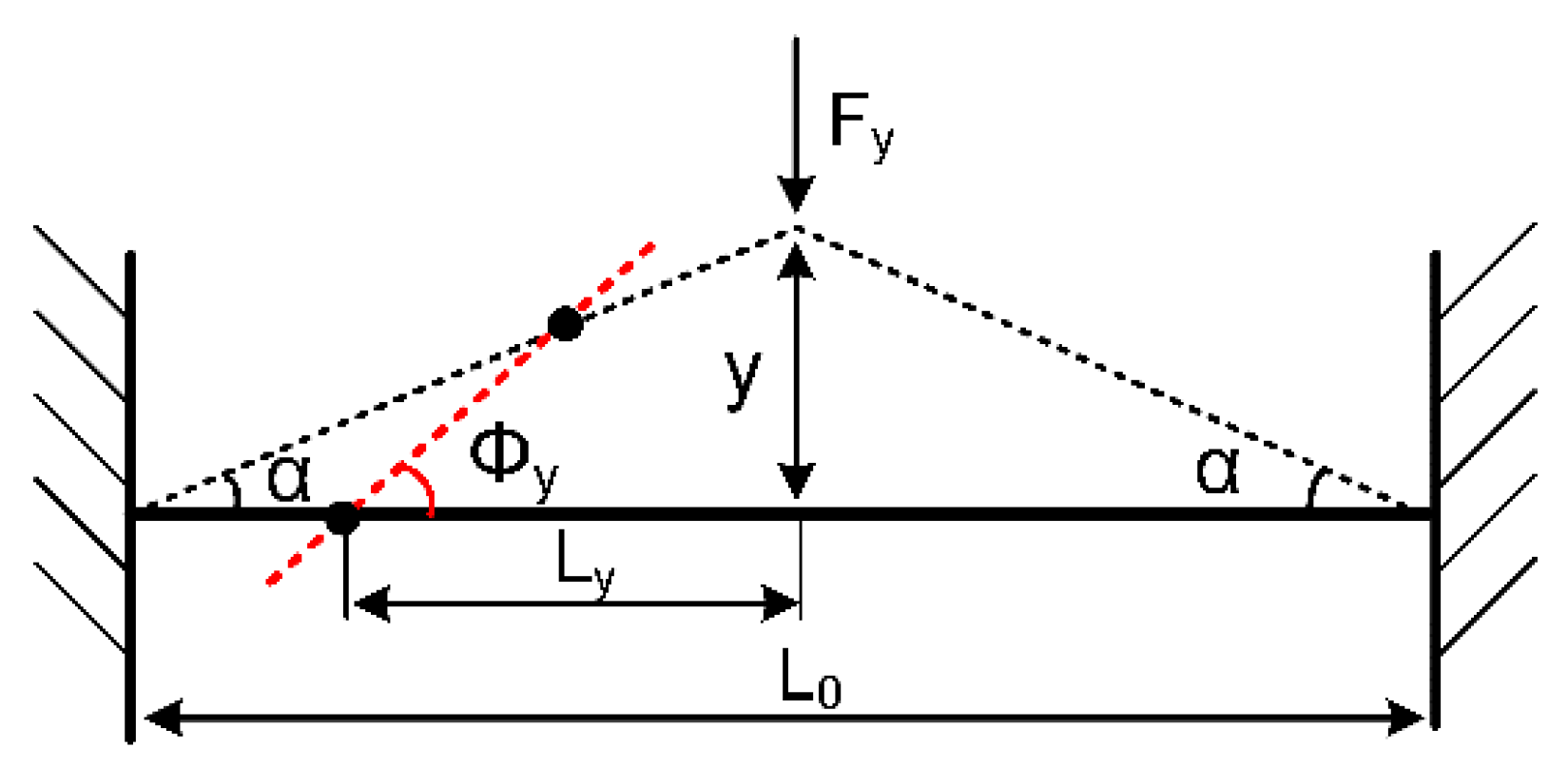
3.1.1. Mechanical Nonlinear Elastic Coefficients
3.1.2. Electrostatic Nonlinear Elastic Coefficients
3.1.3. The Asymmetric Torsion Modal Nonlinearity
3.1.4. The Symmetric Bending Modal Nonlinearity
3.2. Electrostatic Modal Coupling Effect
4. Experiments and Discussion
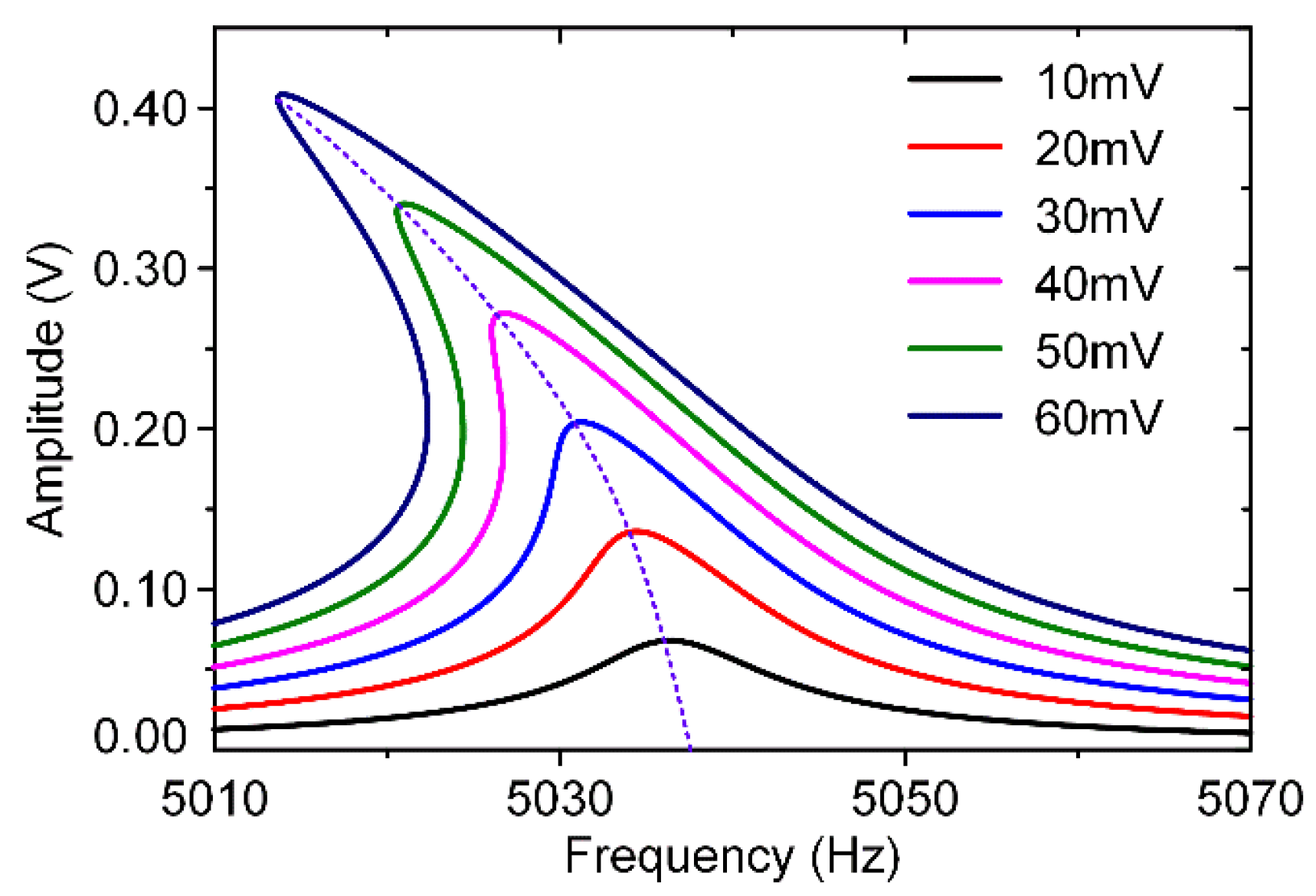
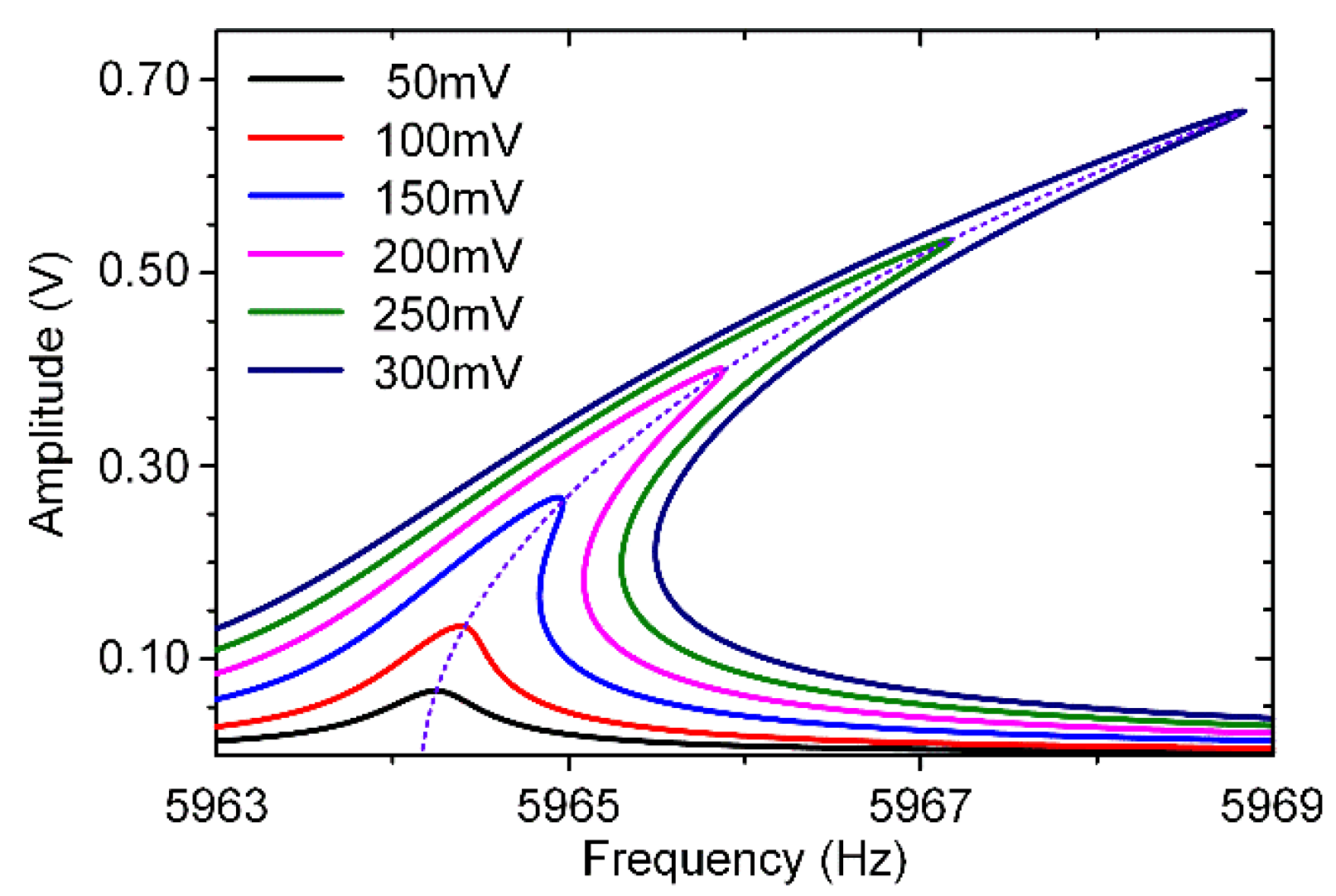
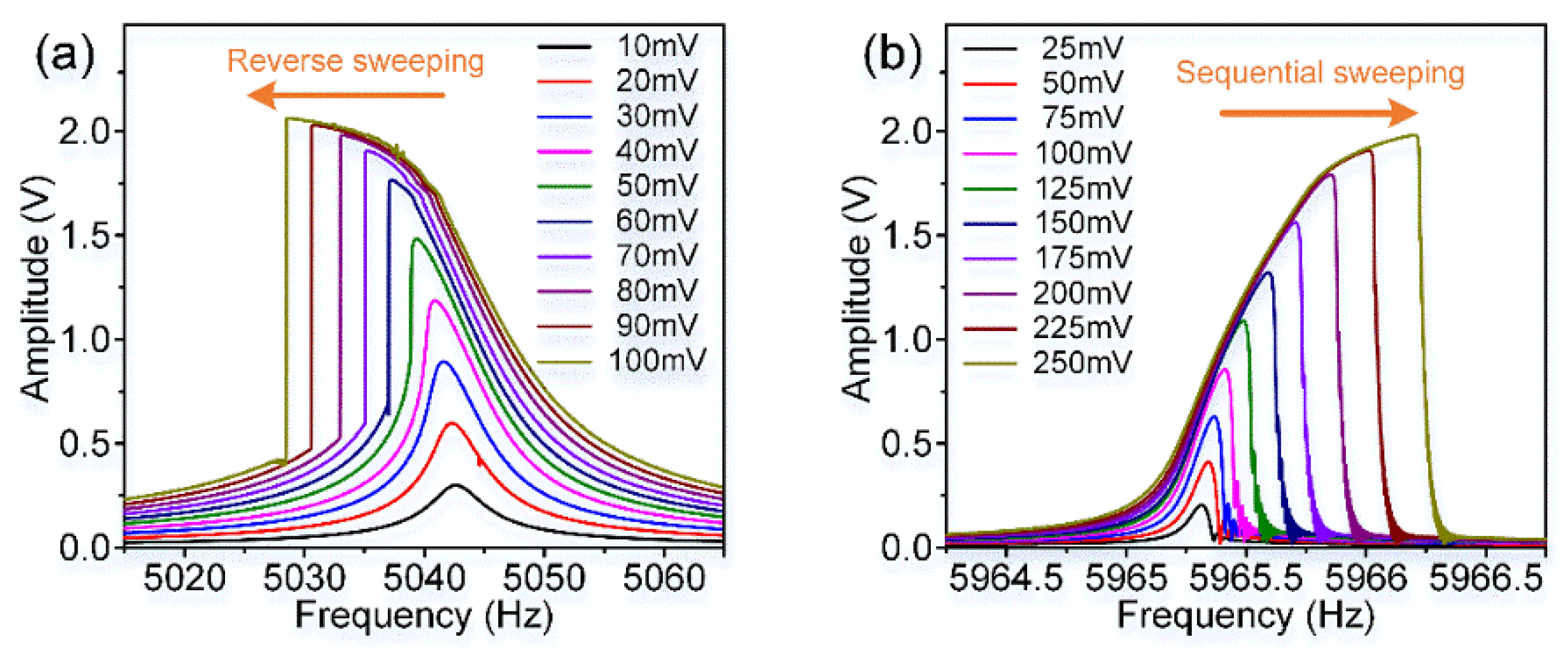
4.1. Nonlinearity Experiments
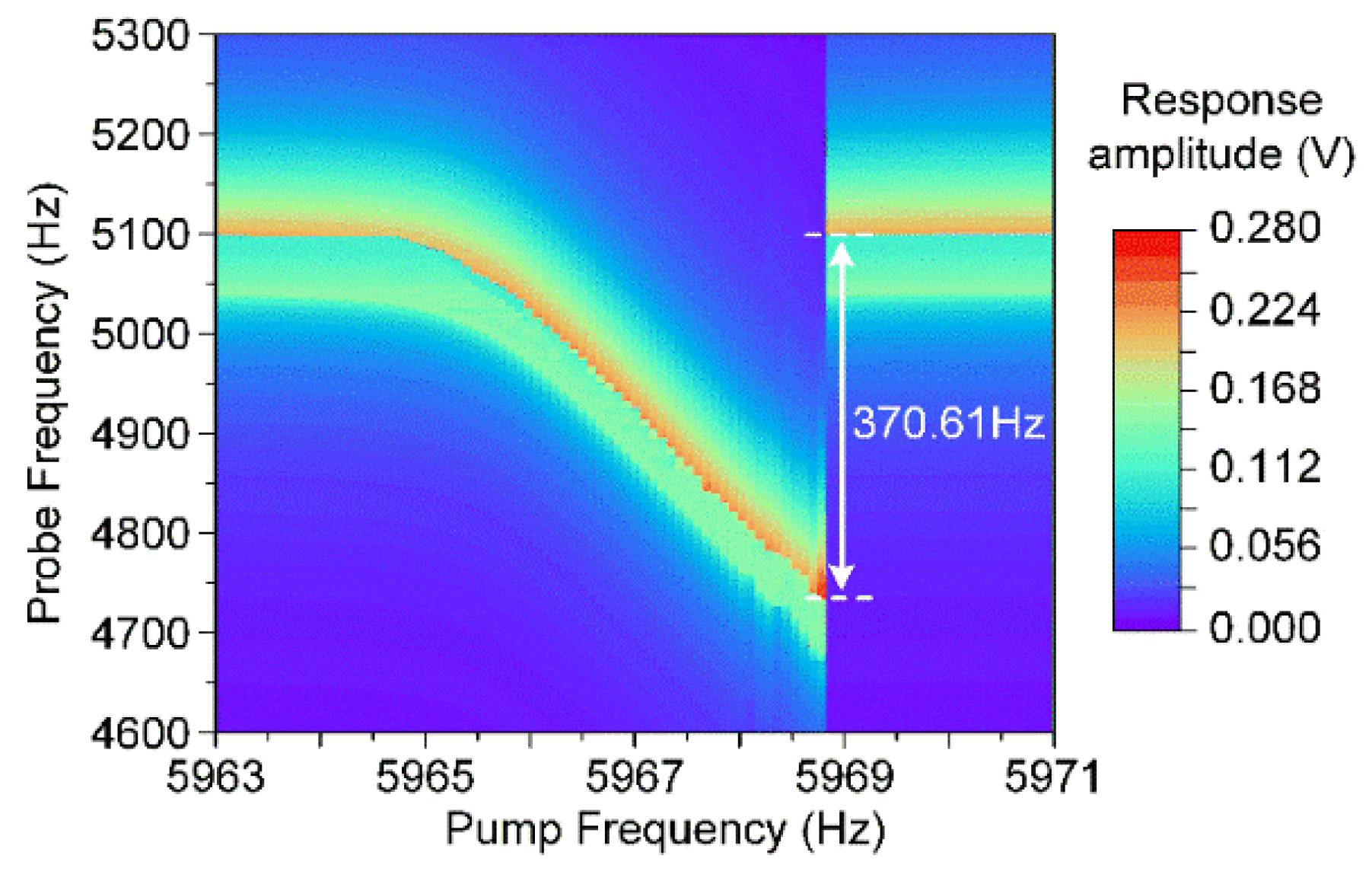
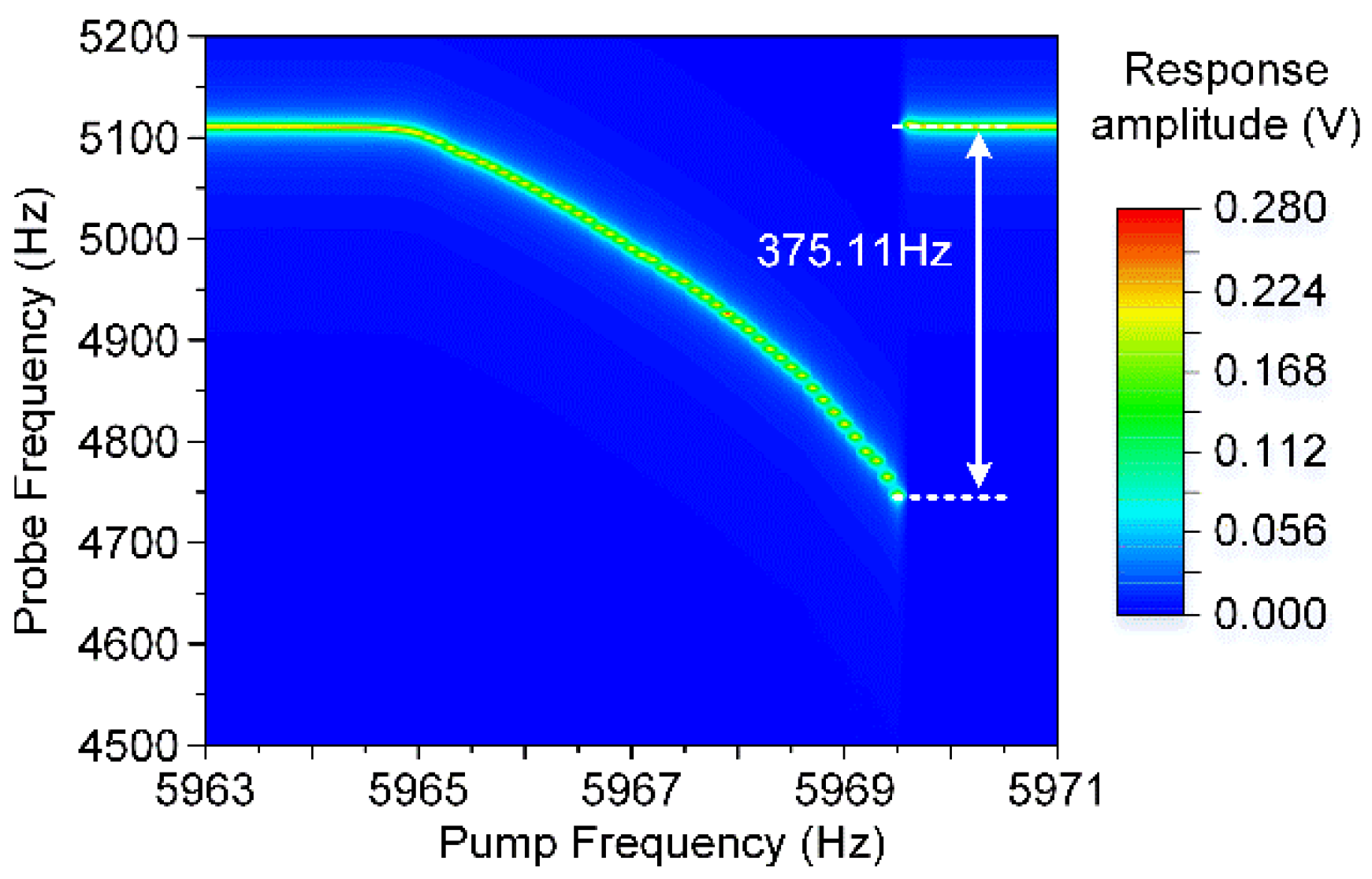
4.2. Modal Coupling Experiments
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Khaled, S.; Jonathan, L.; Walied, M. A Coupled Field Multiphysics Modeling Approach to Investigate RF MEMS Switch Failure Modes under Various Operational Conditions. Sensors 2009, 9, 7988–8006. [Google Scholar]
- Zou, X.; Seshia, A. Non-Linear Frequency Noise Modulation in a Resonant MEMS Accelerometer. IEEE Sens. J. 2017, 17, 4122–4127. [Google Scholar] [CrossRef]
- Tocchio, A.; Caspani, A.; Langfelder, G. Mechanical and Electronic Amplitude-Limiting Techniques in a MEMS Resonant Accelerometer. IEEE Sens. J. 2011, 12, 1719–1725. [Google Scholar] [CrossRef]
- Weng, Y.; Zhang, H.; Wei, X. Dynamic Performance of a Novel Tilting Angle Measurement System Using Three Accelerometers. In Proceedings of the 2016 IEEE Sensors, Orlando, FL, USA, 30 October 2016. [Google Scholar]
- Li, Q.; Xiao, D.; Zhou, X.; Xu, Y.; Zhuo, M.; Hou, Z.; He, K.; Zhang, Y.; Wu, X. 0.04 Degree-per-hour MEMS Disk Resonator Gyroscope with High-quality Factor(510k) and Long Decaying Time Constant (74.9s). Microsyst. Nanoeng. 2018, 4, 32. [Google Scholar] [CrossRef]
- Zhou, X.; Xiao, D.; Wu, X.; Li, Q.; Hu, Q.; Hou, Z.; He, K.; Chen, Z.; Zhao, C.; Wu, Y.; et al. Investigation on the Quality Factor Limit of the (111) Silicon Based Disk Resonator. Micromachines 2018, 9, 25. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Xiao, D.; Zhou, X.; Hou, Z.; Xu, Y.; Wu, X. Quality Factor Improvement in the Disk Resonator Gyroscope by Optimizing the Spoke Length Distribution. J. Microelectromech. Syst. 2018, 27, 414–423. [Google Scholar] [CrossRef]
- Rajavelu, M.; Sivakumar, D.; Sumangala, K.; Rathnam, J.D. Enhanced Sensitivity with Extended Linearity in MEMS Piezoresistive Pressure Sensor. Micro Nano Lett. 2013, 8, 753–756. [Google Scholar] [CrossRef]
- Pirkkalainen, J.; Brandt, M.; Massel, F.; Damskägg, E.; Sillanpää, M.A. Squeezing of Quantum Noise of Motion in a Micromechanical Resonator. Phys. Rev. Lett. 2015, 115, 243601. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Xiao, D.; Wu, X.; Sun, J.; Xu, Y.; Wang, P.; Zhou, X.; Lu, K. Nonlinearity Reduction in Disk Resonator Gyroscopes Based on the Vibration Amplification Effect. IEEE Trans. Ind. Electron. 2019, 67, 6946–6954. [Google Scholar] [CrossRef]
- Mahboob, I.; Nishiguchi, K.; Okamoto, H.; Yamaguchi, H. Phonon-Cavity Electromechanics. Nat. Phys. 2012, 8, 503. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Zanette, D.; Lopez, D.; Czaplewski, D.A.; Shaw, S.W. Direct Observation of Coherent Energy Transfer in Nonlinear Micromechanical Oscillators. Nat. Commun. 2017, 8, 15523. [Google Scholar] [CrossRef] [Green Version]
- Verhagen, E.; Deléglise, S.; Kippenberg, T.; Weis, S.; Schliesser, A. Quantum-Coherent Coupling of a Mechanical Oscillator to An Optical Cavity Mode. Nature 2012, 482, 63–67. [Google Scholar] [CrossRef] [Green Version]
- Miao, T.; Xiao, D.; Wu, X.; Ou, F.; Lu, K.; Zhang, Y. Energy Transfer Control of Mode Cooling Induced by Capacitive Nonlinearity Coupling in MEMS Resonator. In Proceedings of the IEEE 32nd International Conference on Micro Electro Mechanical Systems, Seoul, Korea, 27–31 January 2019. [Google Scholar]
- Hui, P.; Rodriguez, A.; Woolf, D.; Iwase, E.; Khan, M.; Capasso, F.; Loncar, M. Strong Mechanical Nonlinearity of Optomechanically Driven Suspended Photonic Crystal Membrane. In Proceedings of the 2015 Conference on Lasers and Electro-optics, San Jose, CA, USA, 10–15 May 2015. [Google Scholar]
- Jomehzadeh, E.; Afshar, M.; Shi, X.; Galiotis, C.; Pugno, N.M. Nonlinear Softening and Hardening Nonlocal Bending Stiffness of An Initially Curved Monolayer Graphene. Int. J. Non-Linear Mech. 2013, 56, 123–131. [Google Scholar] [CrossRef] [Green Version]
- Taheri-Tehrani, P.; Defoor, M.; Horsley, D. Synchronization of A Micromechanical Oscillator in Different Regimes of Electromechanical Nonlinearity. Appl. Phys. Lett. 2017, 111, 183503. [Google Scholar] [CrossRef]
- Tsaturyan, Y.; Barg, A.; Polzik, E. Ultra-Coherent Nanomechanical Resonators via Soft Clamping and Dissipation Dilution. Nat. Nanotechnol. 2017, 12, 776–783. [Google Scholar] [CrossRef]
- Zhou, X.; Zhao, C.; Seshia, A.; Xiao, D.; Sun, J.; Gerrard, D.D.; Chen, Y.; Flader, I.; Kenny, T.W.; Wu, X.; et al. Dynamic Modulation of Modal Coupling in Microelectromechanical Gyroscopic Ring Resonators. Nat. Commun. 2019, 10, 4980. [Google Scholar] [CrossRef] [Green Version]
- Westra, H.; Poot, M.; Venstra, W. Nonlinear Modal Interactions in Clamped-Clamped Mechanical Resonators. Phys. Rev. Lett. 2010, 105, 117205. [Google Scholar] [CrossRef] [Green Version]
- Matheny, M.; Villanueva, L.; Sader, J. Nonlinear Mode-Coupling in Nanomechanical Systems. Nano Lett. 2013, 13, 4. [Google Scholar] [CrossRef] [Green Version]
- Truitt, P.; Hertzberg, J.; Schwab, K. Linear and Nonlinear Coupling between Transverse Modes of A Nanomechanical Resonator. J. Appl. Phys. 2013, 114, 114307. [Google Scholar] [CrossRef] [Green Version]
- Nitzan, S.; Zega, V.; Horsley, D. Self-Induced Parametric Amplification Arising from Nonlinear Elastic Coupling in A Micromechanical Resonating Disk Gyroscope. Sci. Rep. 2015, 5, 9036. [Google Scholar] [CrossRef] [Green Version]
- Nayfeh, A.; Mook, D. Nonlinear Oscillations; Wiley: New York, NY, USA, 1979; pp. 49–65. [Google Scholar]
- Ou, F.; Hou, Z.; Xiao, D. Analysis and Design of a Polygonal Oblique Beam for the Butterfly Vibratory Gyroscope with Improved Robustness to Fabrication Imperfections. Micromachines 2018, 9, 198. [Google Scholar] [CrossRef] [Green Version]
- Ou, F.; Hou, Z.; Wu, X. A New Stress-released Structure to Improve the Temperature Stability of the Butterfly Vibratory Gyroscope. Micromachines 2019, 10, 82. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hu, H.; Zhang, W. New Progress in Nonlinear Dynamics Theory and Application; Science Press: Beijing, China, 2009; pp. 56–70. [Google Scholar]
- Zhu, H.; Lee, J. System-Level Circuit Simulation of Nonlinearity in Micromechanical Resonators. Sensor Actuators A-Phys. 2012, 186, 15–20. [Google Scholar] [CrossRef]
- Kaajakari, V.; Mattila, T.; Oja, A. Nonlinear Limits for Single-Crystal Silicon Microresonators. J. Microelectromech. Syst. 2004, 13, 715–724. [Google Scholar] [CrossRef] [Green Version]
- Xiao, D.; Cao, S.; Hou, Z.; Chen, Z.; Wang, X.; Wu, X. Enhanced Sensitivity in A Butterfly Gyroscope with A Hexagonal Oblique Beam. AIP Adv. 2015, 5, 041331. [Google Scholar] [CrossRef] [Green Version]
- Mahboob, I.; Nishiguchi, K.; Yamaguchi, H.; Hatanaka, D.; Okazaki, Y.; Fujiwara, A.; Perrissin, N. Dispersive and dissipative coupling in a micromechanical resonator embedded with a nanomechanical resonator. Nano Lett. 2015, 15, 2312–2317. [Google Scholar] [CrossRef] [PubMed]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | Simulation Results | Experimental Results | Frequency Difference |
|---|---|---|---|
| Asymmetric torsion mode | 4916 Hz | 5042.5 Hz | 126.5 Hz |
| Symmetric bending mode | 5809 Hz | 5965.3 Hz | 156.3 Hz |
| It (kg·m2) | Qt (1) | kt0 (N·m/rad) | kt1 (N·m/rad) | kt3 (N·m/rad3) | Ud (V) |
|---|---|---|---|---|---|
| 9.32 × 10−14 | 7524 | 2.42 × 10−4 | −1.06 × 10−6 | −0.37 | 6.5 |
| Ib (kg·m2) | Qb | kb0 (N·m/rad) | kb1 (N·m/rad) | kb3 (N·m/rad3) | Ud (V) |
|---|---|---|---|---|---|
| 9.32 × 10−14 | 14561 | 3.66 × 10−4 | 1.02 × 10−9 | 1.90 × 10−3 | 6.5 |
| γ2 | γ3 | Λ2 | Λ3 | Π2 | Π3 | Ud (V) | Ua2 (V) | Ua3 (V) |
|---|---|---|---|---|---|---|---|---|
| 4.21 | 2.57 | 2.25 × 1014 | −3.33 × 109 | 2.96 × 1011 | 2.96 × 1011 | 6.5 | 0.05 | 0.25 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, K.; Li, Q.; Zhou, X.; Song, G.; Wu, K.; Zhuo, M.; Wu, X.; Xiao, D. Modal Coupling Effect in a Novel Nonlinear Micromechanical Resonator. Micromachines 2020, 11, 472. https://doi.org/10.3390/mi11050472
Lu K, Li Q, Zhou X, Song G, Wu K, Zhuo M, Wu X, Xiao D. Modal Coupling Effect in a Novel Nonlinear Micromechanical Resonator. Micromachines. 2020; 11(5):472. https://doi.org/10.3390/mi11050472
Chicago/Turabian StyleLu, Kuo, Qingsong Li, Xin Zhou, Guoxiong Song, Kai Wu, Ming Zhuo, Xuezhong Wu, and Dingbang Xiao. 2020. "Modal Coupling Effect in a Novel Nonlinear Micromechanical Resonator" Micromachines 11, no. 5: 472. https://doi.org/10.3390/mi11050472
APA StyleLu, K., Li, Q., Zhou, X., Song, G., Wu, K., Zhuo, M., Wu, X., & Xiao, D. (2020). Modal Coupling Effect in a Novel Nonlinear Micromechanical Resonator. Micromachines, 11(5), 472. https://doi.org/10.3390/mi11050472