2.1. Sensor Design
The Cauchy stress tensor that we aim to measure with our proposed sensor is symmetric;
therefore, although the stress tensor at a point consists of nine components, only six of these components are independent, which consist of three orthogonal normal stresses and three orthogonal shear stresses [
14]. The symmetric components are six stress components,
τzx,
τxz,
τzy,
τyz,
τxy, and
τyx. The relationships among the six shear stress can be expressed as Equation (2).
The values of symmetric components are equal. The directions of the symmetric components are orthogonal. Taking advantage of the symmetry of the Cauchy stress tensor, we only need to measure 6 independent components to determine the 9 components of the stress tensor at a point.
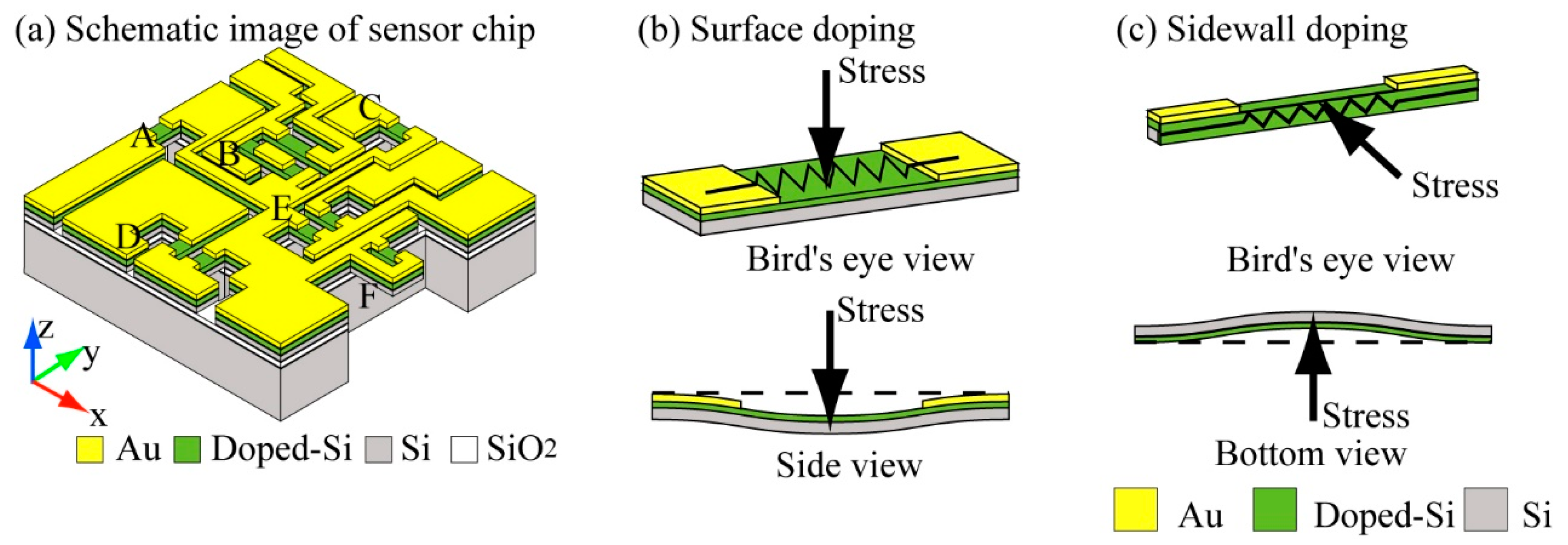
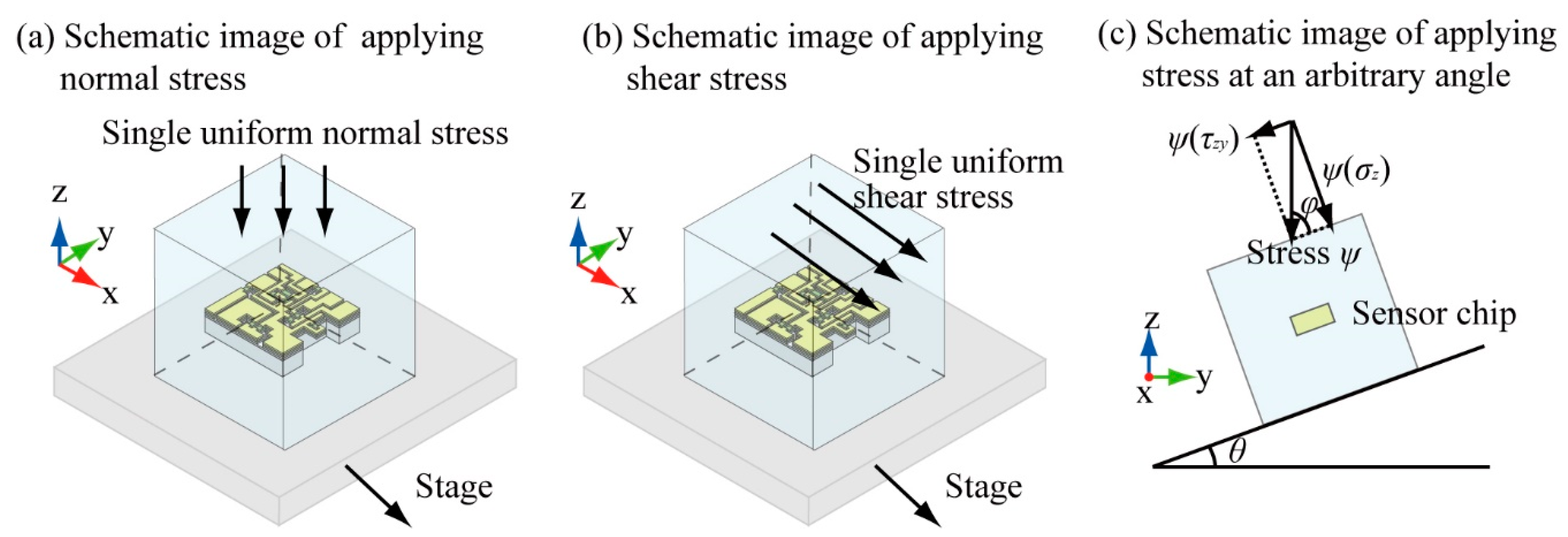
Figure 1a shows a schematic of the design of the proposed tensor sensor, which operates on the aforementioned Cauchy stress tensor principle and piezoresistive theory. The proposed sensor chip consists of the sensing elements which have a piezoresistor only on its surface and the ones which has piezoresistors on both surface and sidewall. Since our sidewall doping method has a limitation that it cannot form the piezoresistor only to the sidewall but the piezoresistor will be also formed to the surface of the structure simultaneously. Therefore, each sensor element was designed and arranged so as to be particularly sensitive to stress in a specific direction. Thus, the specific directional component of the stress can be derived by comparing the outputs of several elements.
This sensor chip will be embedded inside the center of a silicone rubber cube. When the sensor chip is embedded inside the silicone rubber, the microsized piezoresistive beams formed inside the chip will follow the deformation of the silicone rubber. Thus, the 6-axis tensor stresses applied to the surface of the silicone cube can be detected by measuring the deformation of the cube with the piezoresistive beams. Only by measuring the resistance changes.
The principles to detect stresses with each type sensing elements are shown in
Figure 1b,c.
Figure 1b shows the principle for the surface-doped beam. Although the entire upper surface of the beam is doped, by depositing Au onto the beam surface, the resistance change of the target part can be obtained. The parts with Au deposited on them can be used as electrode pads. For the surface-doped beams, the width is larger than the thickness, so the beams are easier to bend in the direction perpendicular to the beam surface.
Figure 1c shows the principle of the beam which has piezoresistors on its surface and the side wall. The sum of the resistance changes of the piezoresistors formed on both surface and side wall can be measured by using the Au wiring partly formed on the surface of the beam. As same as the case of the surface doped beam, the resistance change of the aimed point of the piezoresistor can be detected by changing the design of the Au wiring.
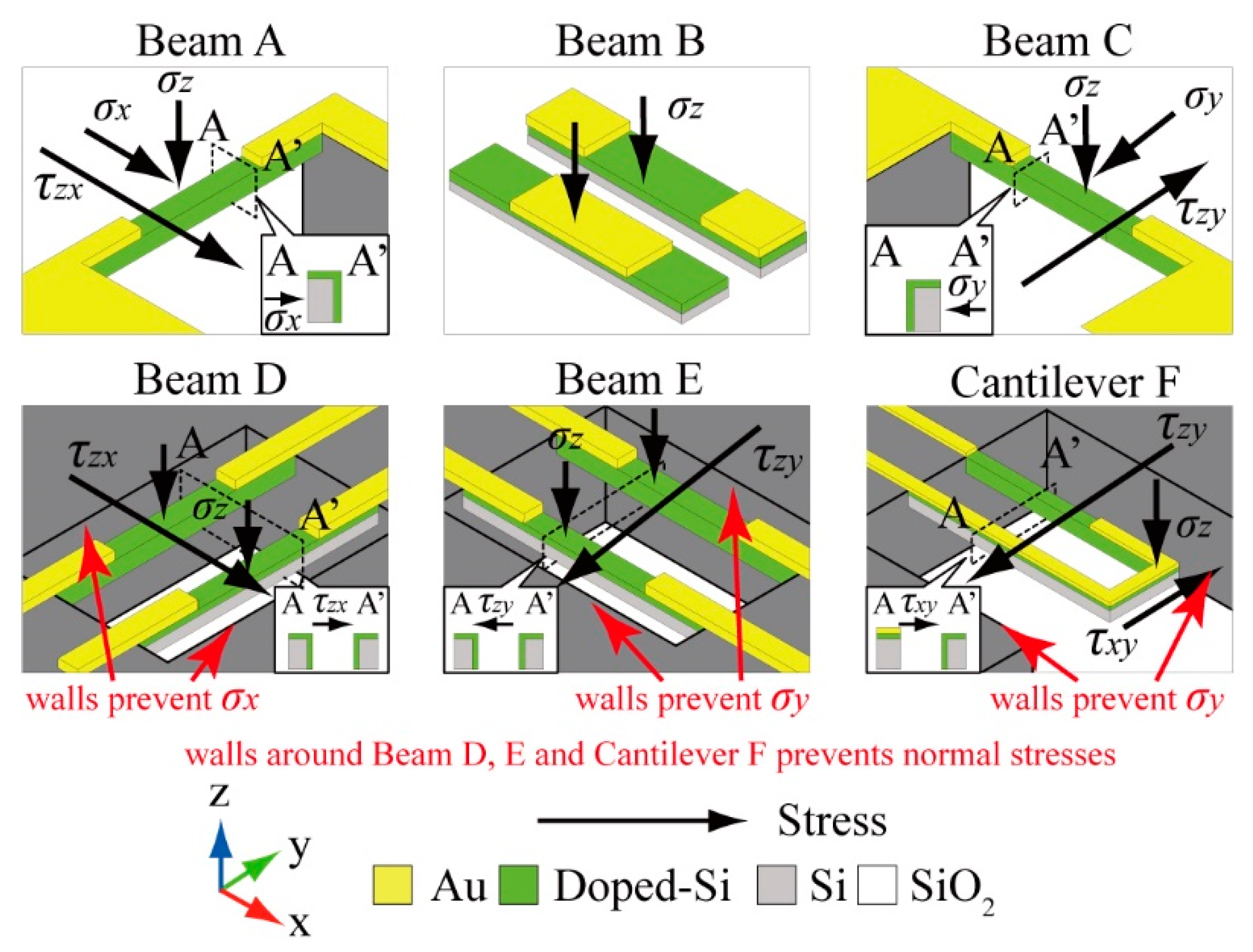
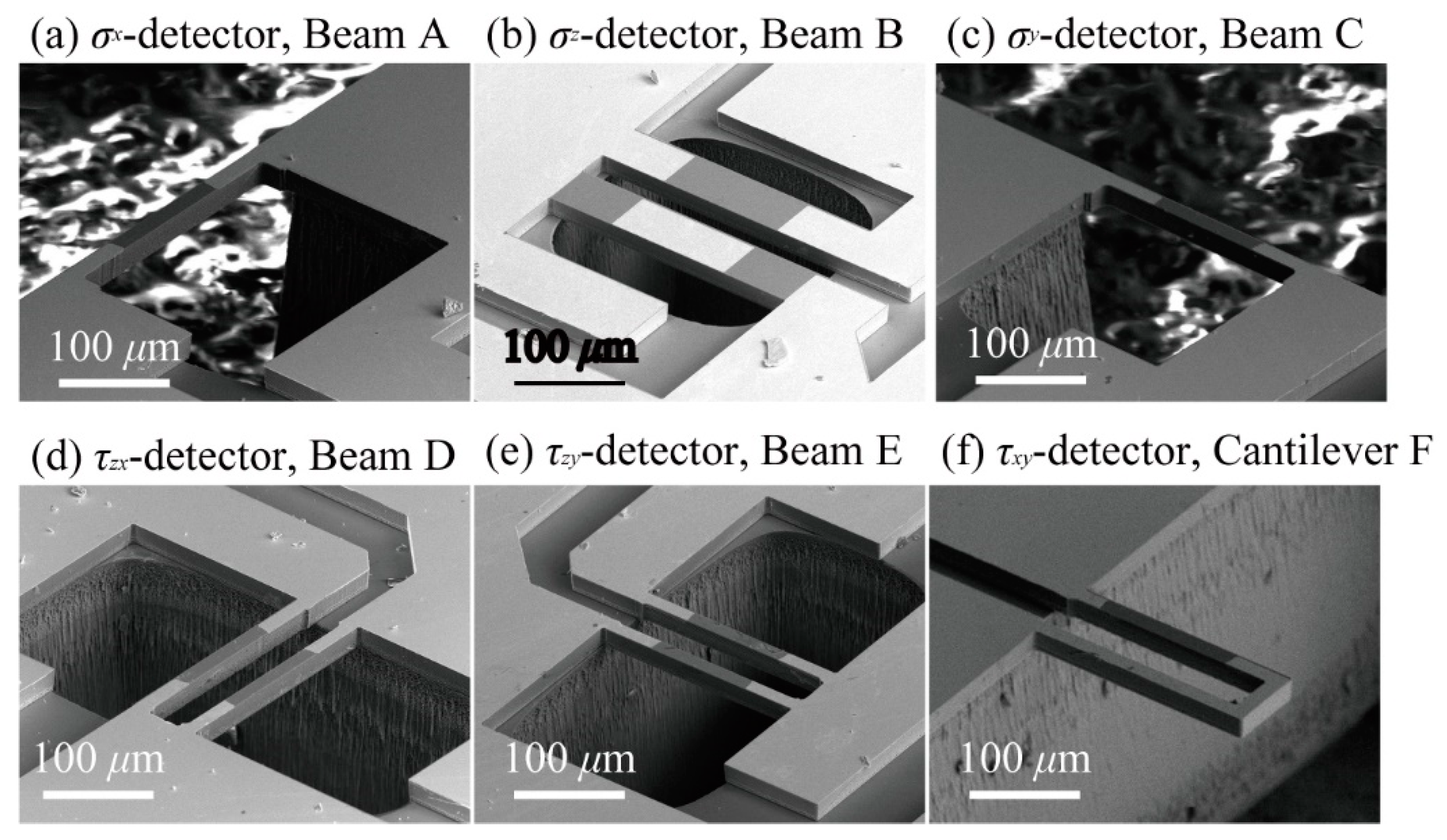
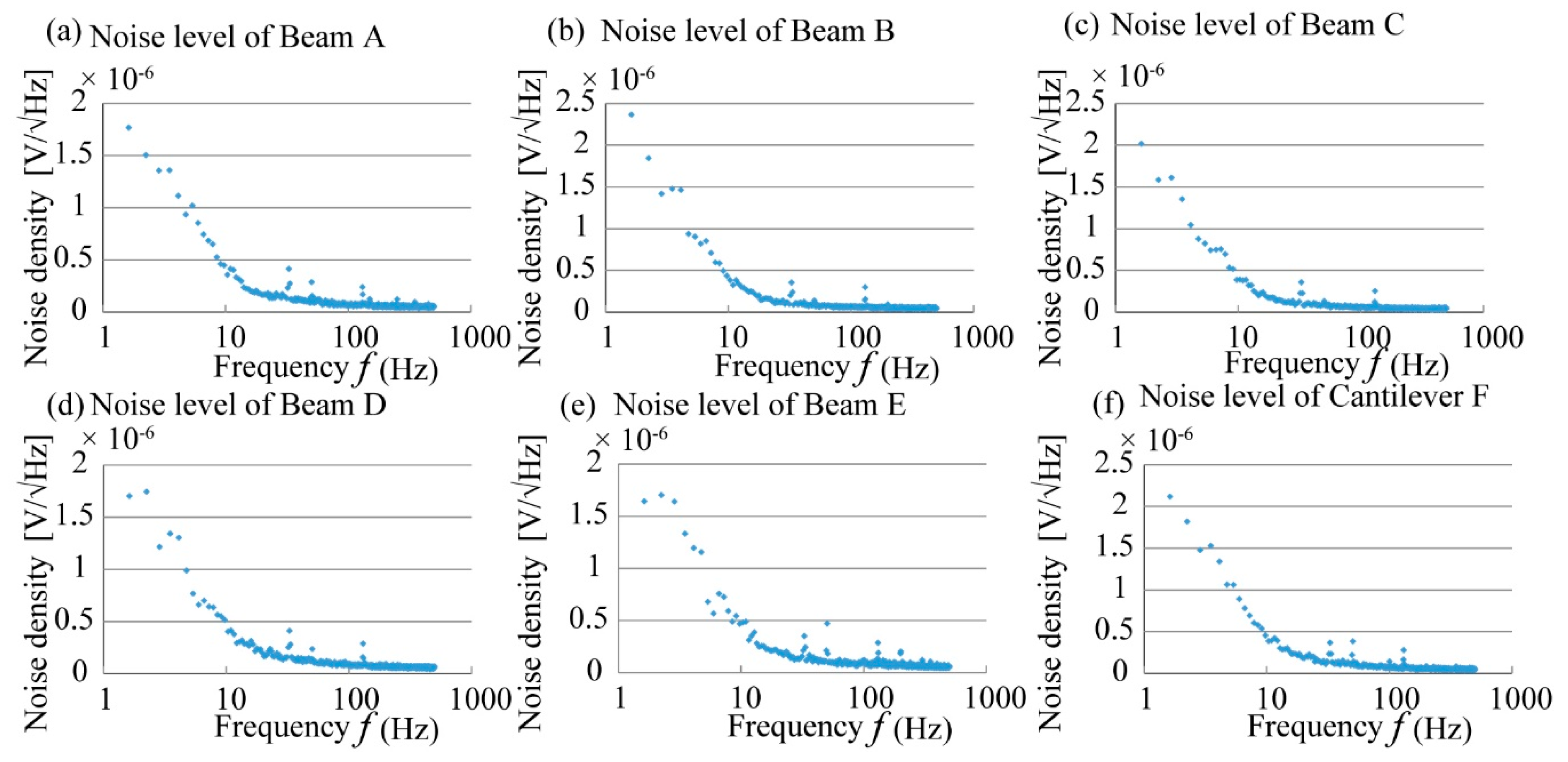
There are six groups of sensing elements on this sensor chip. Among the six groups of sensing elements, Beam A and C consist of one beam. Beam B, D, and E consist of a pair of beams. Cantilever F is a U-shaped cantilever type structure. A schematic of each sensing structure is shown in
Figure 2. The 3-axis normal stresses and the 3-axis symmetrical pairs of shear stresses can be detected by embedding this structure inside the cubic silicone rubber. When stress is applied to an elastic body such as silicone rubber, the elastic body usually deforms uniformly, so the microstructure placed inside moves along the deformation, and distortion which deforms the elements, as shown in
Figure 1b,c, does not occur. However, when a structure with much higher rigidity than silicone rubber is arranged inside it, the difference between the deformation between the elastic body and the rigid structure will occur a distortion at the surrounding of the rigid structure. The stresses applied to silicone rubber will be able to measure by arranging the sensing elements (such as
Figure 1b,c) around the edge of the sensor chip and by measuring this distortion. Additionally, we placed silicon walls around some of the sensing elements to prevent the propagation of some of the stresses and enabled to measure the target directional component of the stress with that element. The details of relationship between the sensing elements and the stress measurement are shown in the following.
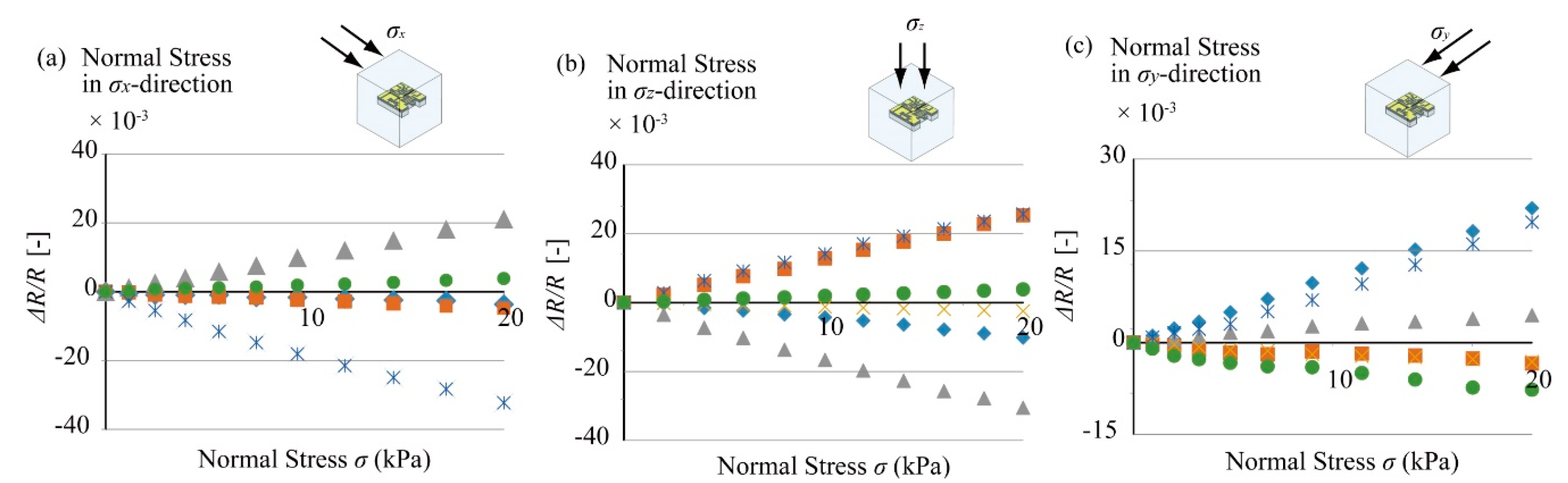
Beams A, B, and C are designed to measure x, z, and y directional normal stresses mainly. Since Beam A is formed on the side edge of the sensor chip as shown in
Figure 1, it follows the deformation of silicone rubber caused by x and z directional normal stresses and the xy, yx symmetrical directional shear stresses. Because piezoresistors are formed on the surface and the side wall of the Beam A, these stresses can be measured simultaneously by the Beam A. Similarly to Beam A, Beam C detects the normal stresses applied in y and z directions and the yz, zy symmetrical directional shear stresses simultaneously. On the other hand, Beam B only follows the z axis deformation caused by z axis normal stress, thus z axis normal stress can be measured according to the resistance change of Beam B. Since silicon walls are formed around the Beam B, it prevents the propagation of the deformation caused by the xy and yx directional shear stresses. Thus, this design enables Beam B to detect only z axis normal stress. Since the xy and yx directional shear stresses will deforms Beam B
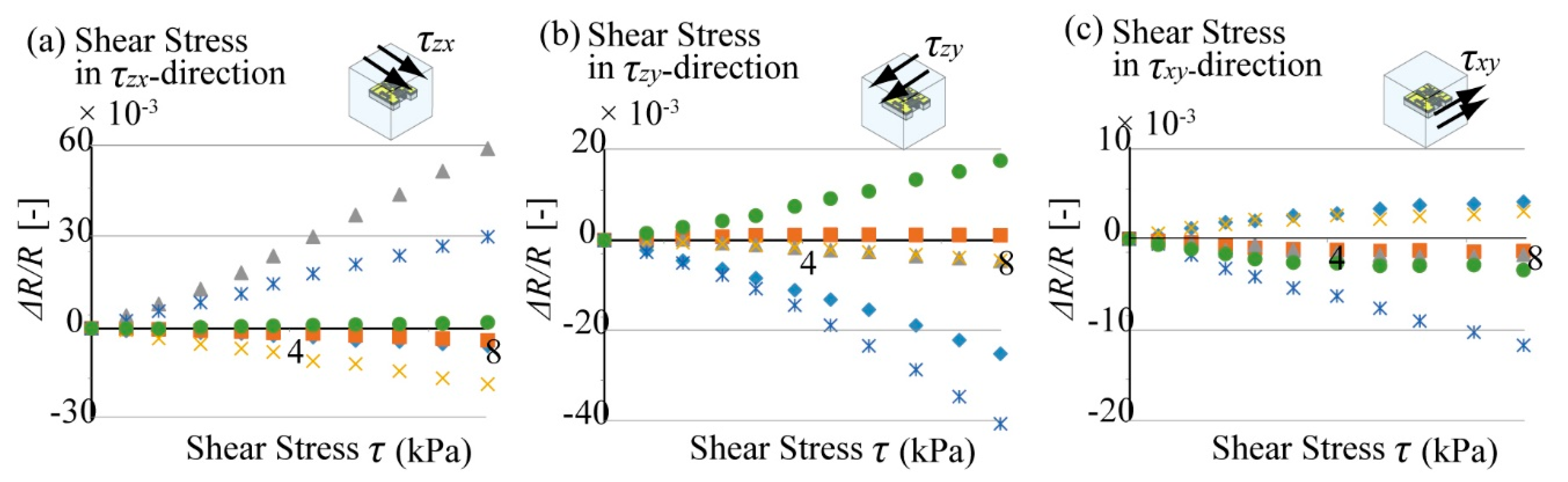
On the other hand, Beams D, E and Cantilever F are designed to detect shear stresses applied to the surface of silicone rubber. As same as Beam A and C, these sensing elements have piezoresistors on both its surface and the side wall, however because of the wall around the sensing elements as shown in
Figure 2, Beam D, E, and Cantilever F do not follows the deformation that caused by x and y directional normal stresses. Since all 6 elements detect different combinations of normal and shear stresses, it is possible to separate the stresses in each axial direction by combining the output results. However, each sensing element has a stress direction which they mainly measure, as shown in
Table 1. The dimensions of piezoresistors suitable for to measure target stress is verified in the next section.
In this paper, our objective is to measure almost static change of the stress tensor occurred inside the building. Therefore, we designed our sensor to measure the static stresses. In our previous research [
15], we found out that the sub-micro size silicon structures embedded inside the silicone rubber can follow the rubber’s deformation with the speed about 100 Hz order. According to this result, we consider that our sensor is effective to measure the static deformation without the influence of the time dilation toward the static deformation of the silicone rubber.
2.2. FEM Simulation to Design the Sensor Dimensions
In our study, we propose three types of sensing elements formed by using; beam types mainly used to measure normal stresses (Beams A, B, and C), a pair of beams, mainly used to measure shear stresses (Beam D and E), and a cantilever type mainly used to measure the shear stresses (Cantilever F). To determine the effective doped area of each type of element and the size of the surrounding silicone rubber for the stress measurement, we performed a structure analysis using finite element method (FEM) simulation. The commercially available software COMSOL Multiphysics (COMSOL, Inc., Burlington, MA, USA) was used for the simulation. Each dimension of the sensing elements was defined as in
Table 2. In this simulation, we supposed that the elements are formed on a handle Si layer 300 μm thick. Additionally, we supposed that polydimethylsiloxane (PDMS) was used as a silicone rubber to cover the sensor chip. The PDMS was formed in a cubic style, and the sensor chip was placed at its center. The Young’s modulus of Si was set to 210 GPa, and that of PDMS was set to 750 kPa.
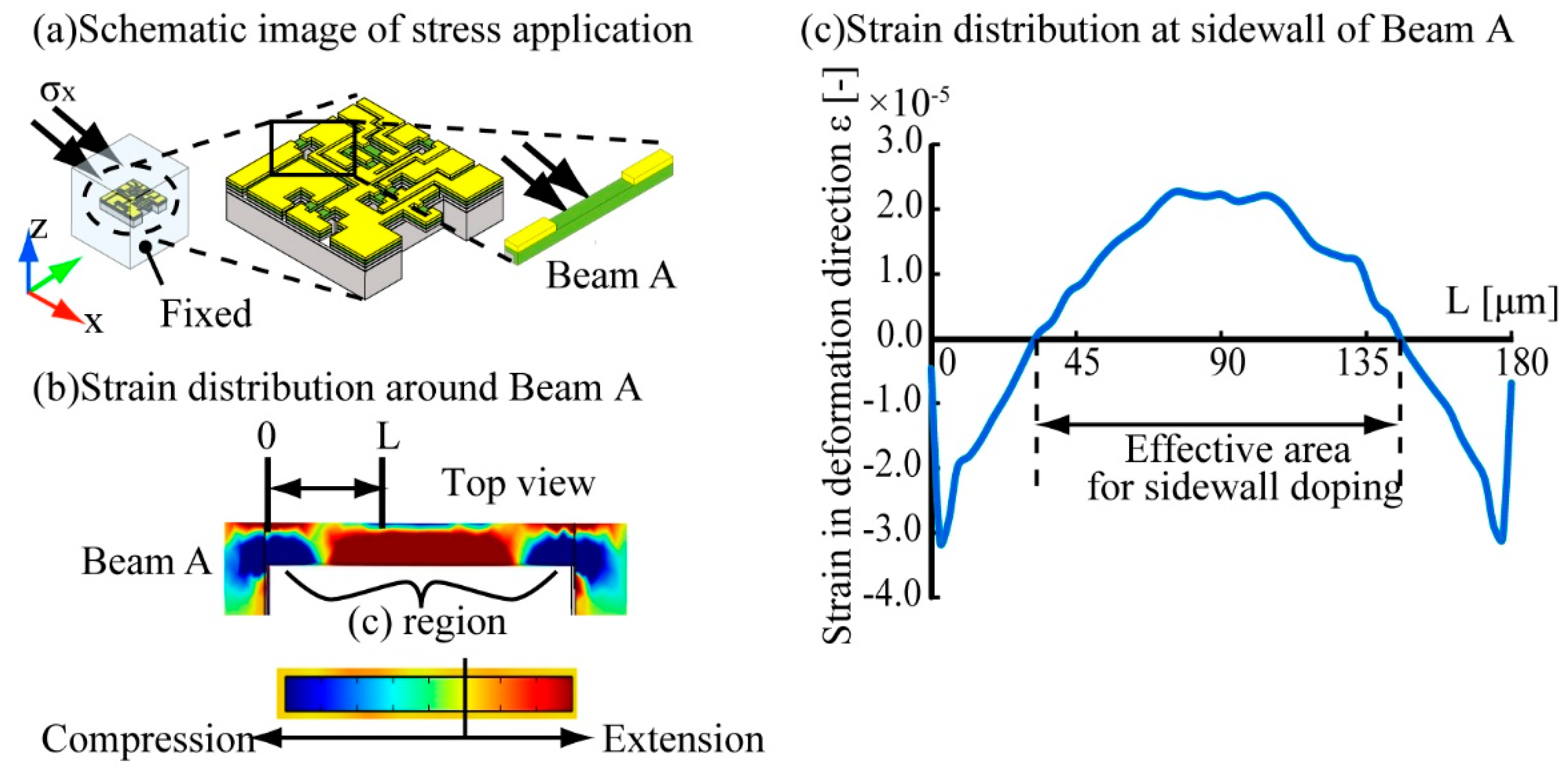
First, to determine the effective doped area of the beams to measure normal stresses, we set the surrounding PDMS cube size as 15 mm
3, and determined the compressed/extended area by applying a normal stress to the surface related to the target beam. A schematic image of the calculation of the influence of x direction normal stress
σx is shown in
Figure 3. In the case of the x direction normal stress simulation, we fixed the bottom surface of the sensor and applied a 5 kPa x direction normal stress to the top surface of the PDMS cube.
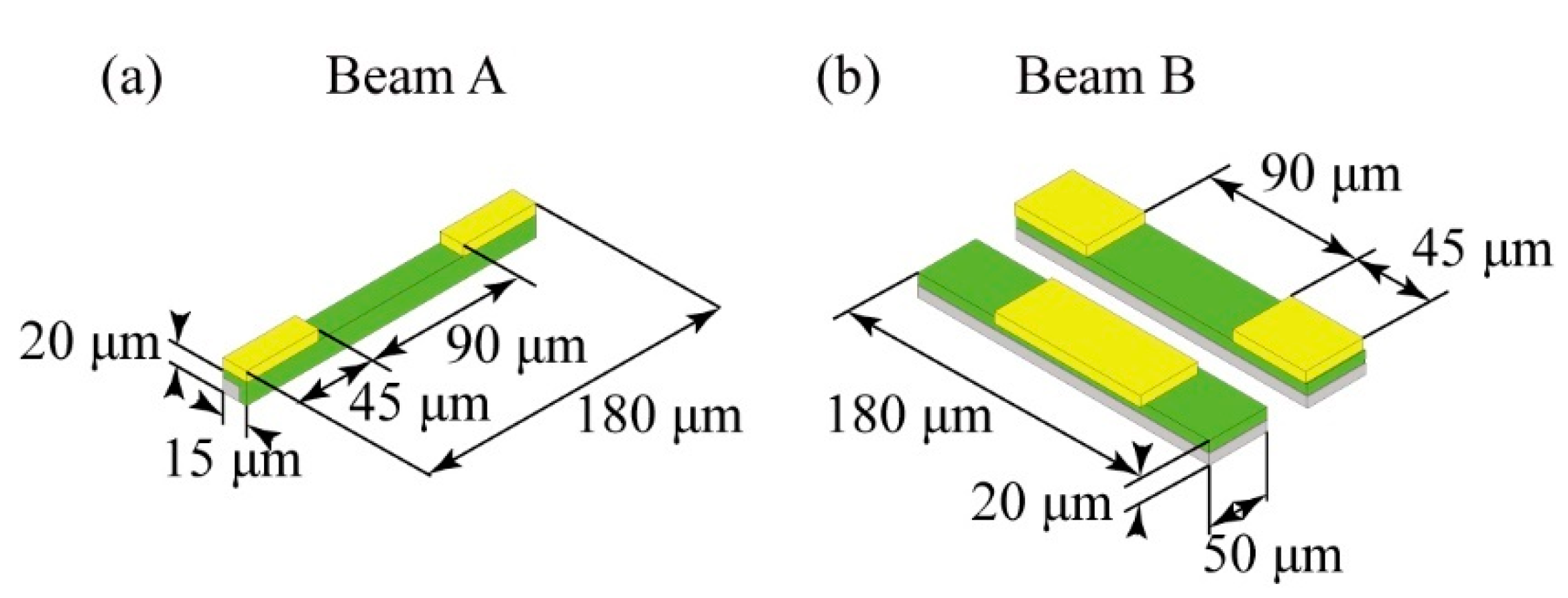
Figure 3b,c shows the compressed/extended region around Beam A. According to this result, whenever a normal stress was applied to the sensor, the center 90 μm region of the side of the beam opposite to the side where the normal stress was applied was extended, and the 45 μm beam end regions were compressed. According to this result, we confirmed that x and y direction normal stresses can be detected by forming a piezoresistive layer on a side wall of the beam. However, the resistivity of the piezoresistor depends on its strain; thus, the positive and negative values of the resistance change will reverse at the center and both ends of the beam. If we measure the total piezoresistance change of the whole piezoresistor formed on the sidewall of the beam, then it will become approximately zero through the cancellation at the center and both edges. Therefore, in our design we covered the 45 μm regions of the top surface at both ends of the beam with electrodes in the case of Beam A and C, which enabled us to measure only the resistance change of the piezoresistors formed at the center 90 μm area of the beam to detect mainly the normal stresses applied in the x and y directions (
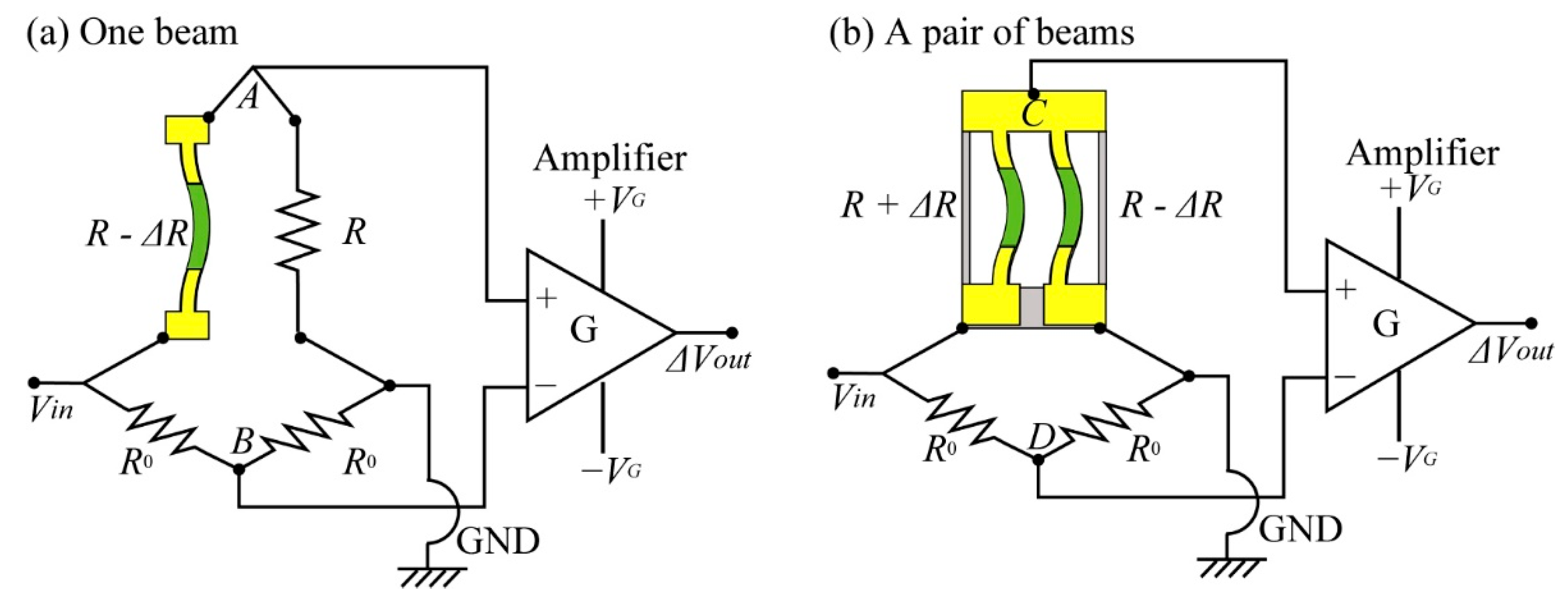
Figure 4a). In the case of Beam B, we used a pair of beams that were doped in their surfaces to detect the z axis normal stress. The proposed design of the beams is shown in
Figure 4b. As shown in the figure, the 45 μm length regions of the surface at the ends of one beam is covered with metal wiring and the center 90 μm length region of the surface of the other beam is covered with a metal layer. As mentioned above, when a normal stress is applied to the sensor, the center of the beam will be extended and the ends of the beam will be compressed. Thus, the positive/negative resistance changes will be reversed at the center and the ends of the beam. Therefore, the resistance changes related to the
z-axis normal stress can be doubled by calculating the differences in the resistance changes caused at the center and the ends of the beam by using the wiring design shown in
Figure 4b. This will enable the measurement of a small
z-axis normal stress with high sensitivity. In this work, we propose to use a differential Wheatstone bridge circuit to measure the difference in the resistance changes of two beams, such as in Beam B, to double the sensitivity.
Second, to determine the appropriate piezoresistive region to measure the 6-axis shear stresses with three elements, Beam D, E, and Cantilever F, we simulated the strain produced on each structure surface. In this simulation, the sensor chip was placed in the center of a cubic PDMS structure. The size of the PDMS cube was set to 3, 5, 15, and 100 mm3. One surface of the silicone rubber cube was fixed, and 5 kPa shear stresses were applied on the opposite side of the cube.
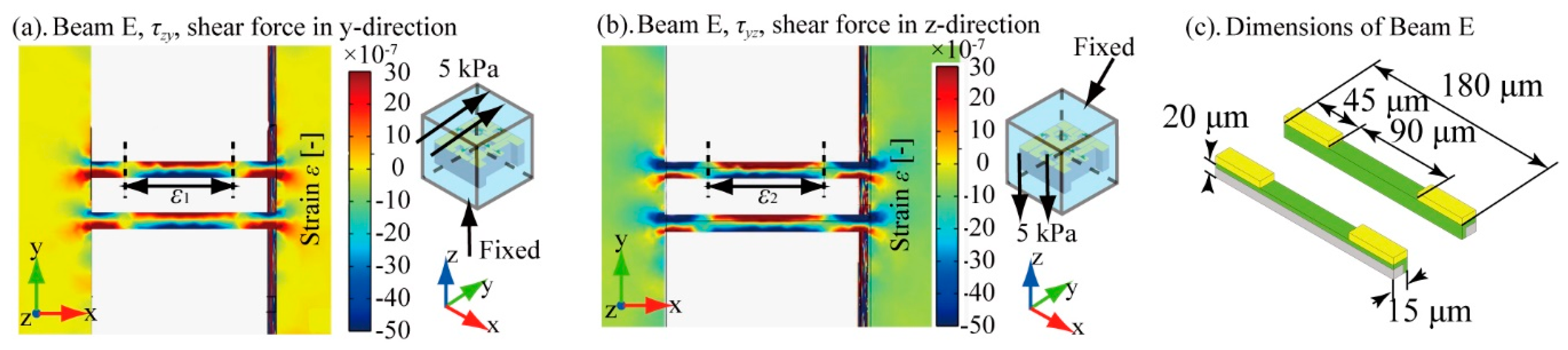
Since Beam D and E have symmetric structures, we only discuss the deformation of Beam E to decide the appropriate design of the piezoresistor for detecting mainly the shear stresses applied in zy and yz directions on the silicone rubber cube.
Figure 5a shows the strain distribution around Beam E when shear stress was applied in the zy and yz directions. The PDMS size in this simulation was 3 mm
3. As shown in this result, whenever shear stresses were applied, the center 90 μm region of the y+ sidewall of the beams was extended, and the 45 μm regions at the ends of the y+ sidewall of the beams were compressed. On the other hand, when we focused on the y- sidewall, it was compressed in the center 90 μm region and extended in the 45 μm regions at the ends of the beams. According to these results, in our design, we formed piezoresistors on the inner sidewalls of the two beams, as shown in
Figure 5b, and covered the surfaces at the 45 μm ends of each beam with metal wiring. Similar to the case of Beam B, because the positive/negative strain induced in the 90 μm length center regions of the inner sidewalls of the pair of beams, where we aim to form piezoresistors, are opposite, we can double the sensitivities of the beams to zy and yz direction shear stresses by measuring the difference in the resistance changes of the pair of beams. This design is also applicable to Beam D.
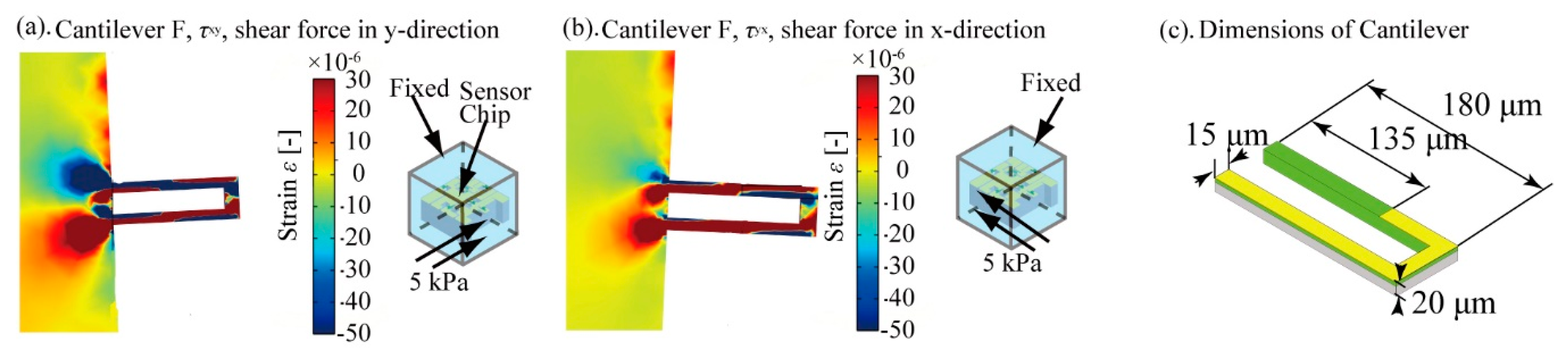
The strain distribution around the cantilever type structure F caused by shear stresses applied in the xy and yx directions is shown in
Figure 6a. Similar to the simulation in
Figure 3, the size of PDMS was set to 3 mm
3 in this calculation. As shown in this result, the end of the inner sidewall surface of the y+ side beam of Cantilever F, as indicated by the red arrow, will be extended by shear stresses in both the xy and yx directions. To measure the strain around this region, in our design, we formed piezoresistors on this inner sidewall of the y+ beam and covered the surface of the cantilever except for the 135 μm length area from the end of the y+ beam. This sensor design enables the detection of the strain around the end of Cantilever F caused by xy and yx direction stresses. Thus, the xy and yx direction stresses can be determined with the Cantilever F structure.
As these results show, the 6-axis shear stress components can be measured by using the design of the three sensing elements, Beam D, E, and F.
According to Cauchy’s law, when the measurement point is small enough to consider it as a point, the magnitudes of the shear stresses applied in two symmetric directions become the same, and the strain induced in each shear stress sensing element, Beam D, E, and F, should show the same deformation under each symmetrical stress. This means that one shear stress sensing element can indirectly measure the change in the stress from the deformation of the elastic body. However, this method is inaccurate because the symmetric direction components of the shear stresses would actually be applied to different surfaces, and the sensor chip is not small like a theoretical point.
For example, in the case of Beam B, when a shear stress of 5 kPa was applied on the cube in the
τzy-direction, the average strain of the doped part of one of the beams was 5.46 × 10
−6; however, when the shear stress was applied in the
τyz-direction, the average strain of the doped part was 7.10 × 10
−6. According to these results, the strain induced in Beam B differed by 29% even though the shear stresses were applied in symmetric directions, when the size of the surrounding PDMS was 3 mm
3. This error can be decreased by increasing the size of the PDMS. Increasing the PDMS size means that the relative size of the sensor chip becomes small compared to the whole sensor structure including PDMS. However, a best size for the measured object does not exist; there is only the better size for the measured object. The change of error with increasing size of the PDMS cube is shown in
Table 3. The size of the PDMS cube is represented by
a (mm).
ε1 is the average strain of one of the beams of Beam E when the stress was applied in the
τzy-direction, and
ε2 is the average strain of one of the beams of Beam E when the stress was applied in the
τyz-direction. The relationship between
ε1,
ε2, and
η is shown in Equation (3).
According to
Table 3, when the size of the surrounding PDMS cube (= 100 mm
3) is 50 times the size of a side of the sensor chip (= 2 mm by 2 mm by 0.3 mm), the error caused by using one shear stress to detect two symmetric shear stress components will be reduced to 1.0%. If the measured object is sufficiently large, then the error can be ignored. However, the 100 mm
3 size is too large for our purpose, to embed the sensor inside building materials and detect the inner stresses. If the sensor size is too large, then it would make the building materials fragile when embedding the sensor inside the materials. By considering the tradeoff between the cross talk of the symmetric shear stresses and the influence on the building materials, we designed the size of the surrounding PDMS cube to be 15 mm
3 and evaluated the size influence on the sensor fabrication and experimental results.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}