
Tethered and Untethered 3D Microactuators Fabricated by Two-Photon Polymerization: A Review




Abstract
:1. Introduction
2. Stimulus Methods of Microactuators
2.1. Magnetic Field
2.2. Light
2.3. pH
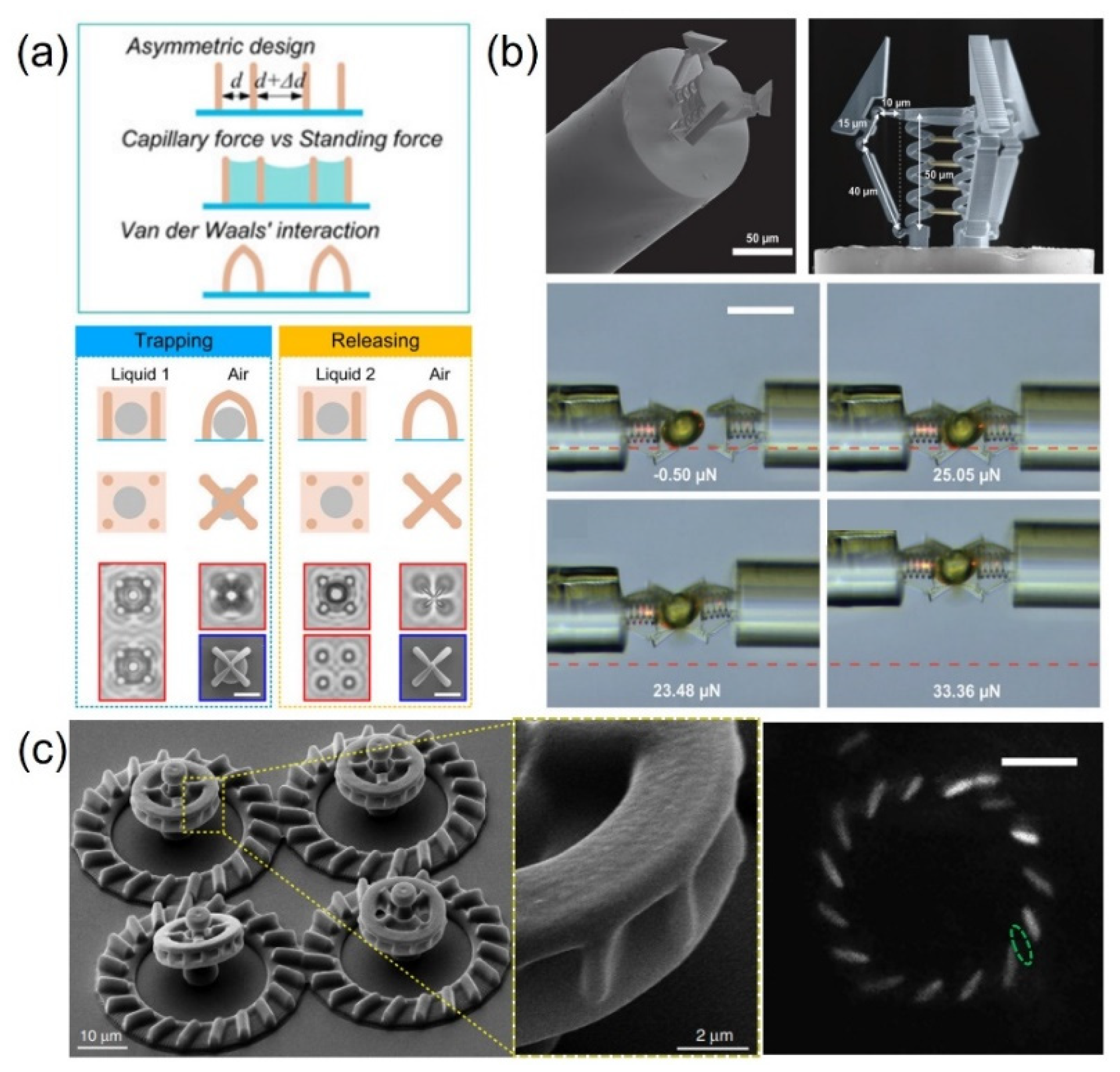
2.4. Microforce
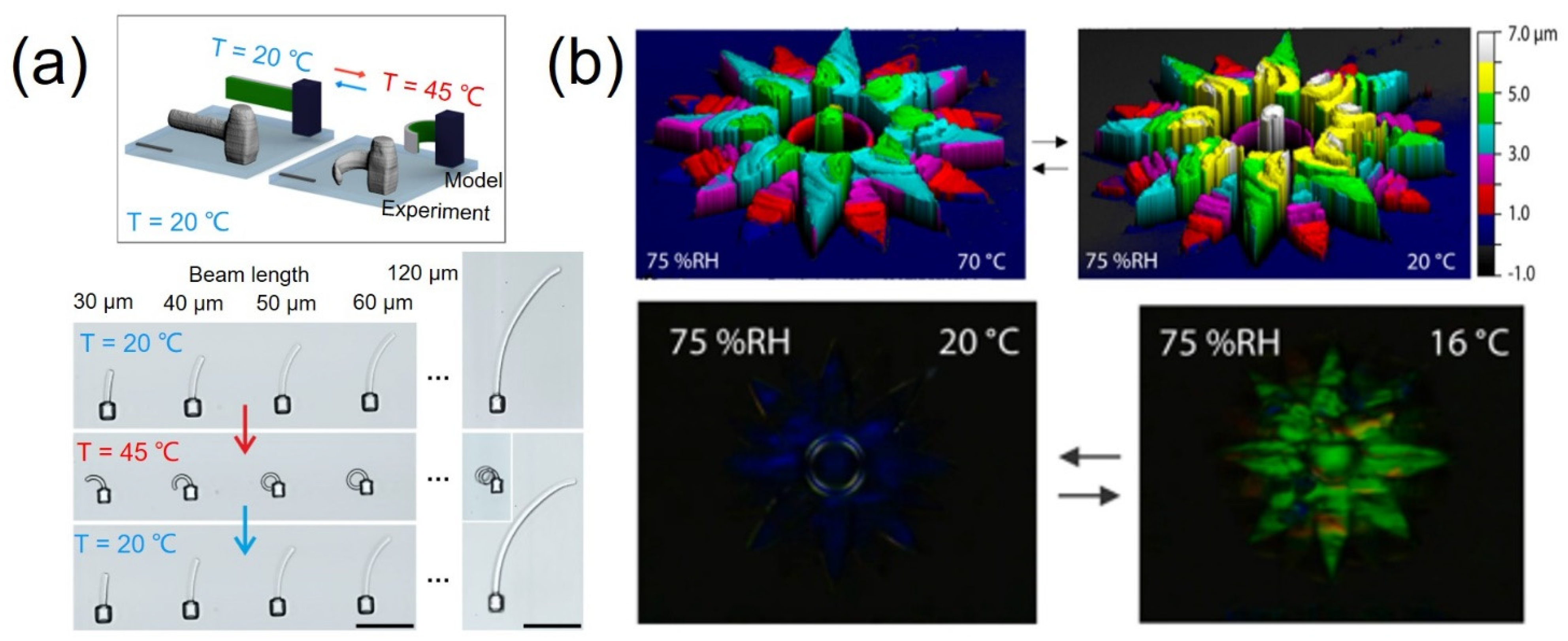
2.5. Heat
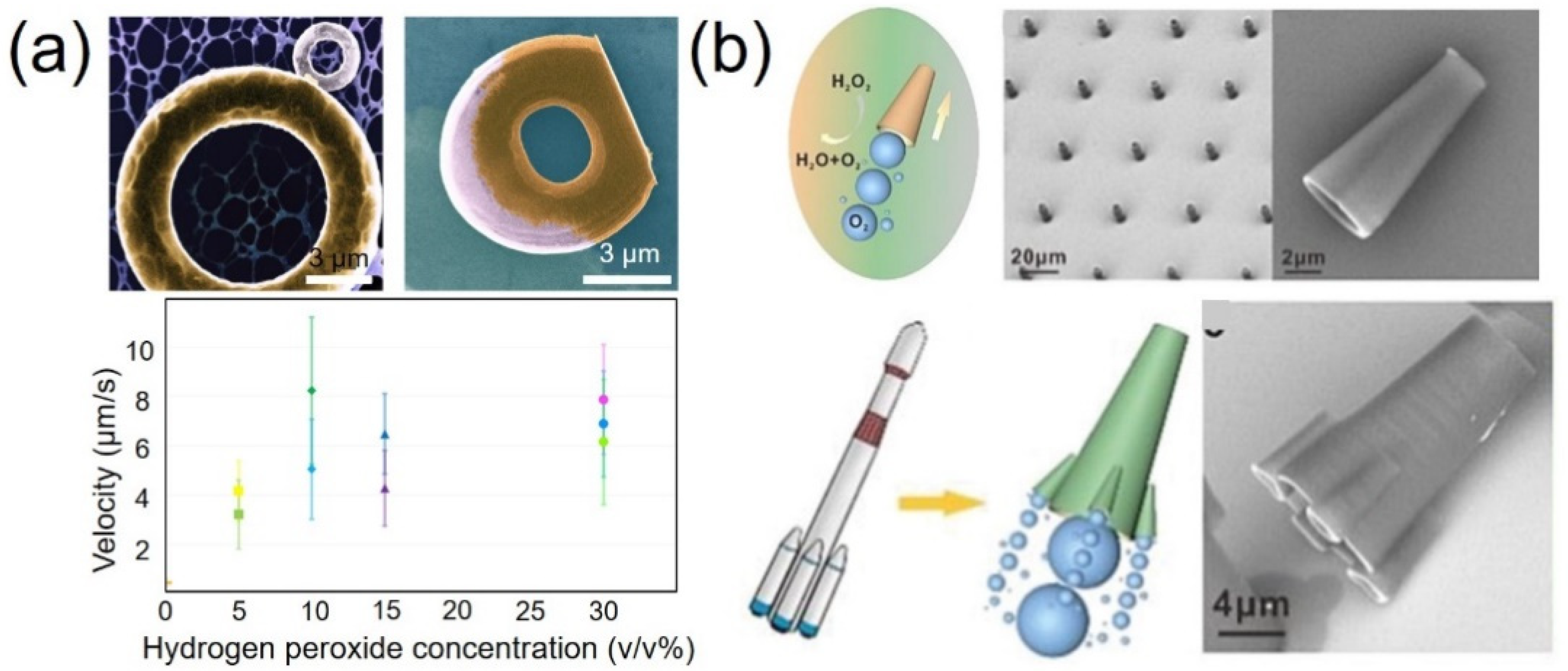
2.6. Solution
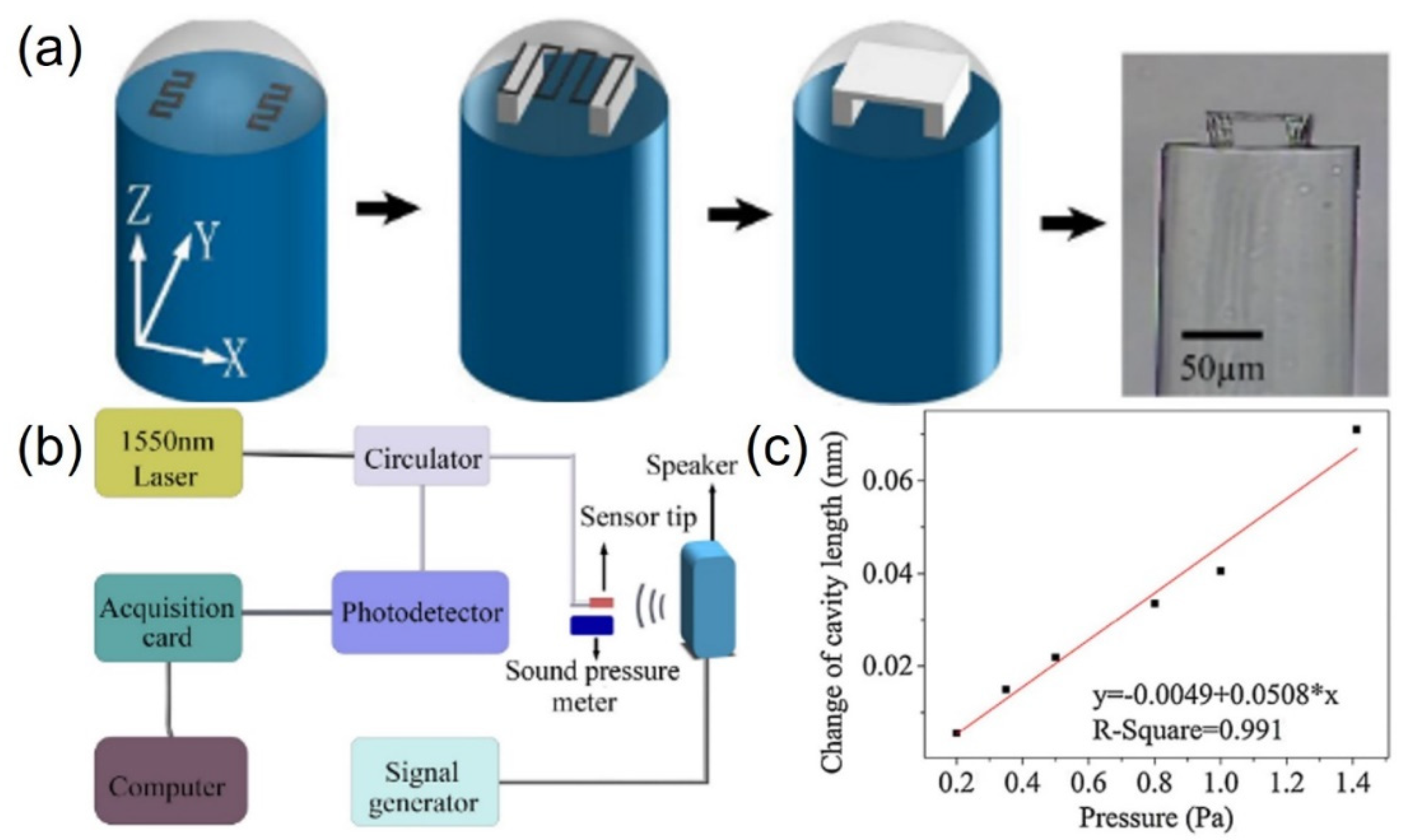
2.7. Acoustic Field
2.8. Electric Field
2.9. The Comparison of Actuation Methods for 3D Microactuators
3. Discussion and Summary of TPP for Microactuators
3.1. Material
3.1.1. Doped Photosensitive Polymer
3.1.2. Liquid Crystal Elastomer
3.1.3. Shape Memory Polymer
3.1.4. Material Processing
3.2. Structural Design and Fabrication
3.2.1. Design and Optimization of Structural Parameters
3.2.2. Miniaturization of Actuators
3.2.3. Fabrication Method with Higher Production and Lower Cost
3.3. Prospective Actuation Methods for 3D Microactuators
4. Outlook
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, Y.; Li, Y.; Hu, Y.; Zhu, X.; Huang, Y.; Zhang, Z.; Rao, S.; Hu, Z.; Qiu, W.; Wang, Y.; et al. Localized Self-Growth of Reconfigurable Architectures Induced by a Femtosecond Laser on a Shape-Memory Polymer. Adv. Mater. 2018, 30, e1803072. [Google Scholar] [CrossRef] [PubMed]
- Gao, W.; Dong, R.; Thamphiwatana, S.; Li, J.; Gao, W.; Zhang, L.; Wang, J. Artificial Micromotors in the Mouse’s Stomach: A Step toward in Vivo Use of Synthetic Motors. ACS Nano 2015, 9, 117–123. [Google Scholar] [CrossRef] [Green Version]
- Wang, E.; Desai, M.S.; Lee, S.W. Light-controlled graphene-elastin composite hydrogel actuators. Nano Lett. 2013, 13, 2826–2830. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cui, H.; Zhao, Q.; Zhang, L.; Du, X. Intelligent Polymer-Based Bioinspired Actuators: From Monofunction to Multifunction. Adv. Intell. Syst. 2020, 2, 2000138. [Google Scholar] [CrossRef]
- Malachowski, K.; Jamal, M.; Jin, Q.; Polat, B.; Morris, C.J.; Gracias, D.H. Self-folding single cell grippers. Nano Lett. 2014, 14, 4164–4170. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Breger, J.C.; Yoon, C.; Xiao, R.; Kwag, H.R.; Wang, M.O.; Fisher, J.P.; Nguyen, T.D.; Gracias, D.H. Self-folding thermo-magnetically responsive soft microgrippers. ACS Appl. Mater. Interfaces 2015, 7, 3398–3405. [Google Scholar] [CrossRef] [PubMed]
- Ceylan, H.; Yasa, I.C.; Yasa, O.; Tabak, A.F.; Giltinan, J.; Sitti, M. 3D-Printed Biodegradable Microswimmer for Theranostic Cargo Delivery and Release. ACS Nano 2019, 13, 3353–3362. [Google Scholar] [CrossRef] [Green Version]
- Yan, X.; Xu, J.; Zhou, Q.; Jin, D.; Vong, C.I.; Feng, Q.; Ng, D.H.L.; Bian, L.; Zhang, L. Molecular cargo delivery using multicellular magnetic microswimmers. Appl. Mater. Today 2019, 15, 242–251. [Google Scholar] [CrossRef]
- Jin, D.; Zhang, L. Embodied intelligence weaves a better future. Nat. Mach. Intell. 2020, 2, 663–664. [Google Scholar] [CrossRef]
- Hu, N.; Han, X.; Huang, S.; Grover, H.M.; Yu, X.; Zhang, L.N.; Trase, I.; Zhang, J.X.; Zhang, L.; Dong, L.X.; et al. Edge effect of strained bilayer nanofilms for tunable multistability and actuation. Nanoscale 2017, 9, 2958–2962. [Google Scholar] [CrossRef]
- Nojoomi, A.; Arslan, H.; Lee, K.; Yum, K. Bioinspired 3D structures with programmable morphologies and motions. Nat. Commun. 2018, 9, 3705. [Google Scholar] [CrossRef]
- Ma, J.N.; Zhang, Y.L.; Han, D.D.; Mao, J.W.; Chen, Z.D.; Sun, H.B. Programmable deformation of patterned bimorph actuator swarm. Natl. Sci. Rev. 2020, 7, 775–785. [Google Scholar] [CrossRef] [Green Version]
- Cangialosi, A.; Yoon, C.; Liu, J.; Huang, Q.; Guo, J.; Nguyen, T.D.; Gracias, D.H.; Schulman, R. DNA sequence-directed shape change of photopatterned hydrogels via high-degree swelling. Science 2017, 357, 1126–1130. [Google Scholar] [CrossRef] [Green Version]
- Zolfagharian, A.; Kouzani, A.Z.; Khoo, S.Y.; Moghadam, A.A.A.; Gibson, I.; Kaynak, A. Evolution of 3D printed soft actuators. Sens. Actuators A Phys. 2016, 250, 258–272. [Google Scholar] [CrossRef]
- Highley, C.B.; Rodell, C.B.; Burdick, J.A. Direct 3D Printing of Shear-Thinning Hydrogels into Self-Healing Hydrogels. Adv. Mater. 2015, 27, 5075–5079. [Google Scholar] [CrossRef] [PubMed]
- Truby, R.L.; Lewis, J.A. Printing soft matter in three dimensions. Nature 2016, 540, 371–378. [Google Scholar] [CrossRef]
- Schaffner, M.; Faber, J.A.; Pianegonda, L.; Ruhs, P.A.; Coulter, F.; Studart, A.R. 3D printing of robotic soft actuators with programmable bioinspired architectures. Nat. Commun. 2018, 9, 878. [Google Scholar] [CrossRef]
- Van Oosten, C.L.; Bastiaansen, C.W.; Broer, D.J. Printed artificial cilia from liquid-crystal network actuators modularly driven by light. Nat. Mater. 2009, 8, 677–682. [Google Scholar] [CrossRef] [PubMed]
- Ionov, L. Hydrogel-based actuators: Possibilities and limitations. Mater. Today 2014, 17, 494–503. [Google Scholar] [CrossRef]
- Kim, Y.; Yuk, H.; Zhao, R.; Chester, S.A.; Zhao, X. Printing ferromagnetic domains for untethered fast-transforming soft materials. Nature 2018, 558, 274–279. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, B.; Jiang, J.; Wu, K.; Guo, C.F.; Wu, Z. High-Fidelity Conformal Printing of 3D Liquid Alloy Circuits for Soft Electronics. ACS Appl. Mater. Interfaces 2019, 11, 7148–7156. [Google Scholar] [CrossRef] [PubMed]
- Ambulo, C.P.; Burroughs, J.J.; Boothby, J.M.; Kim, H.; Shankar, M.R.; Ware, T.H. Four-dimensional Printing of Liquid Crystal Elastomers. ACS Appl. Mater. Interfaces 2017, 9, 37332–37339. [Google Scholar] [CrossRef] [PubMed]
- Gladman, A.S.; Matsumoto, E.A.; Nuzzo, R.G.; Mahadevan, L.; Lewis, J.A. Biomimetic 4D printing. Nat. Mater. 2016, 15, 413–418. [Google Scholar] [CrossRef] [PubMed]
- Jin, D.; Chen, Q.; Huang, T.-Y.; Huang, J.; Zhang, L.; Duan, H. Four-dimensional direct laser writing of reconfigurable compound micromachines. Mater. Today 2020, 32, 19–25. [Google Scholar] [CrossRef]
- Kawata, S.; Sun, H.-B.; Tanaka, T.; Takada, K. Finer features for functional microdevices. Nature 2001, 412, 697–698. [Google Scholar] [CrossRef]
- Gan, Z.; Cao, Y.; Evans, R.A.; Gu, M. Three-dimensional deep sub-diffraction optical beam lithography with 9 nm feature size. Nat. Commun. 2013, 4, 2061. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.-L.; Chen, Q.-D.; Xia, H.; Sun, H.-B. Designable 3D nanofabrication by femtosecond laser direct writing. Nano Today 2010, 5, 435–448. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiao, Y.; Li, C.; Chen, C.; Li, J.; Hu, Y.; Wu, D.; Chu, J. Bioinspired micro/nanostructured surfaces prepared by femtosecond laser direct writing for multi-functional applications. Int. J. Extrem. Manuf. 2020, 2, 032002. [Google Scholar] [CrossRef]
- Zhang, C.; Hu, Y.; Li, J.; Lao, Z.; Ni, J.; Chu, J.; Huang, W.; Wu, D. An improved multi-exposure approach for high quality holographic femtosecond laser patterning. Appl. Phys. Lett. 2014, 105, 221104. [Google Scholar] [CrossRef]
- Lao, Z.; Hu, Y.; Zhang, C.; Yang, L.; Li, J.; Chu, J.; Wu, D. Capillary Force Driven Self-Assembly of Anisotropic Hierarchical Structures Prepared by Femtosecond Laser 3D Printing and Their Applications in Crystallizing Microparticles. ACS Nano 2015, 9, 12060–12069. [Google Scholar] [CrossRef]
- Xu, B.; Du, W.Q.; Li, J.W.; Hu, Y.L.; Yang, L.; Zhang, C.C.; Li, G.Q.; Lao, Z.X.; Ni, J.C.; Chu, J.R.; et al. High efficiency integration of three-dimensional functional microdevices inside a microfluidic chip by using femtosecond laser multifoci parallel microfabrication. Sci. Rep. 2016, 6, 19989. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Hu, Y.; Du, W.; Wu, P.; Rao, S.; Cai, Z.; Lao, Z.; Xu, B.; Ni, J.; Li, J.; et al. Optimized holographic femtosecond laser patterning method towards rapid integration of high-quality functional devices in microchannels. Sci. Rep. 2016, 6, 33281. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lao, Z.X.; Hu, Y.L.; Pan, D.; Wang, R.Y.; Zhang, C.C.; Ni, J.C.; Xu, B.; Li, J.W.; Wu, D.; Chu, J.R. Self-Sealed Bionic Long Microchannels with Thin Walls and Designable Nanoholes Prepared by Line-Contact Capillary-Force Assembly. Small 2017, 13, 1603957. [Google Scholar] [CrossRef]
- Xu, B.; Hu, W.; Du, W.; Hu, Y.; Zhang, C.; Lao, Z.; Ni, J.; Li, J.; Wu, D.; Chu, J.; et al. Arch-like microsorters with multi-modal and clogging-improved filtering functions by using femtosecond laser multifocal parallel microfabrication. Opt. Express 2017, 25, 16739–16753. [Google Scholar] [CrossRef] [PubMed]
- Cai, Z.; Liu, Y.; Hu, Y.; Zhang, C.; Xu, J.; Ji, S.; Ni, J.; Lao, Z.; Li, J.; Zhao, Y.; et al. Generation of colorful Airy beams and Airy imaging of letters via two-photon processed cubic phase plates. Opt. Lett. 2018, 43, 1151–1154. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hu, Y.; Zhang, Y.; Yuan, H.; Wang, R.; Jiang, S.; Lao, Z.; Li, G.; Wu, D.; Li, J.; Chu, J. Capillary-assisted localized crystallization on discrete micropillar rings. Appl. Phys. Lett. 2018, 113, 251904. [Google Scholar] [CrossRef]
- Xu, B.; Shi, Y.; Lao, Z.; Ni, J.; Li, G.; Hu, Y.; Li, J.; Chu, J.; Wu, D.; Sugioka, K. Real-Time Two-Photon Lithography in Controlled Flow to Create a Single-Microparticle Array and Particle-Cluster Array for Optofluidic Imaging. Lab Chip 2018, 18, 442–450. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.L.; Tian, Y.; Wang, H.; Ma, Z.C.; Han, D.D.; Niu, L.G.; Chen, Q.D.; Sun, H.B. Dual-3D Femtosecond Laser Nanofabrication Enables Dynamic Actuation. ACS Nano 2019, 13, 4041–4048. [Google Scholar] [CrossRef]
- Sun, Y.L.; Dong, W.F.; Yang, R.Z.; Meng, X.; Zhang, L.; Chen, Q.D.; Sun, H.B. Dynamically tunable protein microlenses. Angew. Chem. Int. Ed. 2012, 51, 1558–1562. [Google Scholar] [CrossRef]
- Liu, D.-X.; Sun, Y.-L.; Dong, W.-F.; Yang, R.-Z.; Chen, Q.-D.; Sun, H.-B. Dynamic laser prototyping for biomimetic nanofabrication. Laser Photonics Rev. 2014, 8, 882–888. [Google Scholar] [CrossRef]
- Tottori, S.; Zhang, L.; Qiu, F.; Krawczyk, K.K.; Franco-Obregon, A.; Nelson, B.J. Magnetic helical micromachines: Fabrication, controlled swimming, and cargo transport. Adv. Mater. 2012, 24, 811–816. [Google Scholar] [CrossRef]
- Yang, Z.; Zhang, L. Magnetic Actuation Systems for Miniature Robots: A Review. Adv. Intell. Syst. 2020, 2000082. [Google Scholar] [CrossRef]
- Ionov, L. Polymeric actuators. Langmuir 2015, 31, 5015–5024. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Zhang, L. External Power-Driven Microrobotic Swarm: From Fundamental Understanding to Imaging-Guided Delivery. ACS Nano 2021, 15, 149–174. [Google Scholar] [CrossRef]
- Hu, C.; Pané, S.; Nelson, B.J. Soft Micro- and Nanorobotics. Annu. Rev. Control Robot. Auton. Syst. 2018, 1, 53–75. [Google Scholar] [CrossRef]
- Medina-Sánchez, M.; Magdanz, V.; Guix, M.; Fomin, V.M.; Schmidt, O.G. Swimming Microrobots: Soft, Reconfigurable, and Smart. Adv. Funct. Mater. 2018, 28, 1707228. [Google Scholar] [CrossRef]
- Zhang, Y.; Yuan, K.; Zhang, L. Micro/Nanomachines: From Functionalization to Sensing and Removal. Adv. Mater. Technol. 2019, 4, 1800636. [Google Scholar] [CrossRef] [Green Version]
- Sitti, M.; Wiersma, D.S. Pros and Cons: Magnetic versus Optical Microrobots. Adv. Mater. 2020, 32, e1906766. [Google Scholar] [CrossRef]
- Wang, B.; Kostarelos, K.; Nelson, B.J.; Zhang, L. Trends in Micro-/Nanorobotics: Materials Development, Actuation, Localization, and System Integration for Biomedical Applications. Adv. Mater. 2021, 33, 2002047. [Google Scholar] [CrossRef]
- Ma, Z.C.; Zhang, Y.L.; Han, B.; Hu, X.Y.; Li, C.H.; Chen, Q.D.; Sun, H.B. Femtosecond laser programmed artificial musculoskeletal systems. Nat. Commun. 2020, 11, 4536. [Google Scholar] [CrossRef] [PubMed]
- Ni, J.; Wang, C.; Zhang, C.; Hu, Y.; Yang, L.; Lao, Z.; Xu, B.; Li, J.; Wu, D.; Chu, J. Three-dimensional chiral microstructures fabricated by structured optical vortices in isotropic material. Light Sci. Appl. 2017, 6, e17011. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Lu, H.; Zhang, Y.; Yu, S.; Malyi, O.I.; Zhao, X.; Wang, L.; Wang, H.; Peng, J.; Li, X.; et al. Direct coherent multi-ink printing of fabric supercapacitors. Sci. Adv. 2021, 7, eabd6978. [Google Scholar] [CrossRef]
- Ge, Q.; Chen, Z.; Cheng, J.; Zhang, B.; Zhang, Y.-F.; Li, H.; He, X.; Yuan, C.; Liu, J.; Magdassi, S.; et al. 3D printing of highly stretchable hydrogel with diverse UV curable polymers. Sci. Adv. 2021, 7, eaba4261. [Google Scholar] [CrossRef]
- Yin, H.; Ding, Y.; Zhai, Y.; Tan, W.; Yin, X. Orthogonal programming of heterogeneous micro-mechano-environments and geometries in three-dimensional bio-stereolithography. Nat. Commun. 2018, 9, 4096. [Google Scholar] [CrossRef]
- Tumbleston, J.R.; Shirvanyants, D.; Ermoshkin, N.; Janusziewicz, R.; Johnson, A.R.; Kelly, D.; Chen, K.; Pinschmidt, R.; Rolland, J.P.; Ermoshkin, A.; et al. Continuous liquid interface production of 3D objects. Science 2015, 347, 1349–1352. [Google Scholar] [CrossRef] [PubMed]
- Shusteff, M.; Browar, A.E.M.; Kelly, B.E.; Henriksson, J.; Weisgraber, T.H.; Panas, R.M.; Fang, N.X.; Spadaccini, C.M. One-step volumetric additive manufacturing of complex polymer structures. Sci. Adv. 2017, 3, eaao5496. [Google Scholar] [CrossRef] [Green Version]
- Regehly, M.; Garmshausen, Y.; Reuter, M.; Konig, N.F.; Israel, E.; Kelly, D.P.; Chou, C.Y.; Koch, K.; Asfari, B.; Hecht, S. Xolography for linear volumetric 3D printing. Nature 2020, 588, 620–624. [Google Scholar] [CrossRef] [PubMed]
- Wang, B.; Chan, K.F.; Yu, J.; Wang, Q.; Yang, L.; Chiu, P.W.Y.; Zhang, L. Reconfigurable Swarms of Ferromagnetic Colloids for Enhanced Local Hyperthermia. Adv. Funct. Mater. 2018, 28, 1705701. [Google Scholar] [CrossRef]
- Zhou, Q.; Petit, T.; Choi, H.; Nelson, B.J.; Zhang, L. Dumbbell Fluidic Tweezers for Dynamical Trapping and Selective Transport of Microobjects. Adv. Funct. Mater. 2017, 27, 1604571. [Google Scholar] [CrossRef]
- Wang, Q.; Yang, L.; Wang, B.; Yu, E.; Yu, J.; Zhang, L. Collective Behavior of Reconfigurable Magnetic Droplets via Dynamic Self-Assembly. ACS Appl. Mater. Interfaces 2019, 11, 1630–1637. [Google Scholar] [CrossRef] [PubMed]
- Ji, F.; Wang, B.; Zhang, L. Light-Triggered Catalytic Performance Enhancement Using Magnetic Nanomotor Ensembles. Research 2020, 2020, 6380794. [Google Scholar] [CrossRef]
- Wang, Q.; Yu, J.; Yuan, K.; Yang, L.; Jin, D.; Zhang, L. Disassembly and spreading of magnetic nanoparticle clusters on uneven surfaces. Appl. Mater. Today 2020, 18, 100489. [Google Scholar] [CrossRef]
- Harduf, Y.; Jin, D.; Or, Y.; Zhang, L. Nonlinear Parametric Excitation Effect Induces Stability Transitions in Swimming Direction of Flexible Superparamagnetic Microswimmers. Soft Robot. 2018, 5, 389–398. [Google Scholar] [CrossRef] [Green Version]
- Yu, J.; Xu, T.; Lu, Z.; Vong, C.I.; Zhang, L. On-Demand Disassembly of Paramagnetic Nanoparticle Chains for Microrobotic Cargo Delivery. IEEE Trans. Robot. 2017, 33, 1213–1225. [Google Scholar] [CrossRef]
- Yu, J.; Wang, B.; Du, X.; Wang, Q.; Zhang, L. Ultra-extensible ribbon-like magnetic microswarm. Nat. Commun. 2018, 9, 3260. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, Y.; Yan, K.; Ji, F.; Zhang, L. Enhanced Removal of Toxic Heavy Metals Using Swarming Biohybrid Adsorbents. Adv. Funct. Mater. 2018, 28, 1806340. [Google Scholar] [CrossRef]
- Yu, J.; Jin, D.; Chan, K.F.; Wang, Q.; Yuan, K.; Zhang, L. Active generation and magnetic actuation of microrobotic swarms in bio-fluids. Nat. Commun. 2019, 10, 5631. [Google Scholar] [CrossRef] [Green Version]
- Maruo, S.; Inoue, H. Optically driven micropump produced by three-dimensional two-photon microfabrication. Appl. Phys. Lett. 2006, 89, 144101. [Google Scholar] [CrossRef] [Green Version]
- Qiu, F.; Fujita, S.; Mhanna, R.; Zhang, L.; Simona, B.R.; Nelson, B.J. Magnetic Helical Microswimmers Functionalized with Lipoplexes for Targeted Gene Delivery. Adv. Funct. Mater. 2015, 25, 1666–1671. [Google Scholar] [CrossRef]
- Medina-Sanchez, M.; Schwarz, L.; Meyer, A.K.; Hebenstreit, F.; Schmidt, O.G. Cellular Cargo Delivery: Toward Assisted Fertilization by Sperm-Carrying Micromotors. Nano Lett. 2016, 16, 555–561. [Google Scholar] [CrossRef]
- Yasa, I.C.; Tabak, A.F.; Yasa, O.; Ceylan, H.; Sitti, M. 3D-Printed Microrobotic Transporters with Recapitulated Stem Cell Niche for Programmable and Active Cell Delivery. Adv. Funct. Mater. 2019, 29, 1808992. [Google Scholar] [CrossRef]
- Xin, C.; Yang, L.; Li, J.; Hu, Y.; Qian, D.; Fan, S.; Hu, K.; Cai, Z.; Wu, H.; Wang, D.; et al. Conical Hollow Microhelices with Superior Swimming Capabilities for Targeted Cargo Delivery. Adv. Mater. 2019, 31, e1808226. [Google Scholar] [CrossRef] [PubMed]
- Yang, L.; Chen, X.; Wang, L.; Hu, Z.; Xin, C.; Hippler, M.; Zhu, W.; Hu, Y.; Li, J.; Wang, Y.; et al. Targeted Single-Cell Therapeutics with Magnetic Tubular Micromotor by One-Step Exposure of Structured Femtosecond Optical Vortices. Adv. Funct. Mater. 2019, 29, 1905745. [Google Scholar] [CrossRef]
- Han, D.D.; Zhang, Y.L.; Ma, J.N.; Liu, Y.Q.; Han, B.; Sun, H.B. Light-Mediated Manufacture and Manipulation of Actuators. Adv. Mater. 2016, 28, 8328–8343. [Google Scholar] [CrossRef]
- Martella, D.; Nocentini, S.; Nuzhdin, D.; Parmeggiani, C.; Wiersma, D.S. Photonic Microhand with Autonomous Action. Adv. Mater. 2017, 29, 1704047. [Google Scholar] [CrossRef]
- Wang, W.; Liu, Y.-Q.; Liu, Y.; Han, B.; Wang, H.; Han, D.-D.; Wang, J.-N.; Zhang, Y.-L.; Sun, H.-B. Direct Laser Writing of Superhydrophobic PDMS Elastomers for Controllable Manipulation via Marangoni Effect. Adv. Funct. Mater. 2017, 27, 1702946. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, Y.L.; Ku, J.F.; He, Y.; Xu, B.B.; Chen, Q.D.; Xia, H.; Sun, H.B. High performance magnetically controllable microturbines. Lab Chip 2010, 10, 2902–2905. [Google Scholar] [CrossRef]
- Maggi, C.; Saglimbeni, F.; Dipalo, M.; De Angelis, F.; Di Leonardo, R. Micromotors with asymmetric shape that efficiently convert light into work by thermocapillary effects. Nat. Commun. 2015, 6, 7855. [Google Scholar] [CrossRef]
- Zeng, H.; Wasylczyk, P.; Wiersma, D.S.; Priimagi, A. Light Robots: Bridging the Gap between Microrobotics and Photomechanics in Soft Materials. Adv. Mater. 2018, 30, e1703554. [Google Scholar] [CrossRef]
- Pan, D.; Wu, D.; Li, P.J.; Ji, S.Y.; Nie, X.; Fan, S.Y.; Chen, G.Y.; Zhang, C.C.; Xin, C.; Xu, B.; et al. Transparent Light-Driven Hydrogel Actuator Based on Photothermal Marangoni Effect and Buoyancy Flow for Three-Dimensional Motion. Adv. Funct. Mater. 2021, 2009386. [Google Scholar] [CrossRef]
- Han, B.; Zhang, Y.-L.; Chen, Q.-D.; Sun, H.-B. Carbon-Based Photothermal Actuators. Adv. Funct. Mater. 2018, 28, 1802235. [Google Scholar] [CrossRef]
- Lin, X.F.; Hu, G.Q.; Chen, Q.D.; Niu, L.G.; Li, Q.S.; Ostendorf, A.; Sun, H.B. A light-driven turbine-like micro-rotor and study on its light-to-mechanical power conversion efficiency. Appl. Phys. Lett. 2012, 101, 113901. [Google Scholar] [CrossRef] [Green Version]
- Zheng, C.; Jin, F.; Zhao, Y.; Zheng, M.; Liu, J.; Dong, X.; Xiong, Z.; Xia, Y.; Duan, X. Light-driven micron-scale 3D hydrogel actuator produced by two-photon polymerization microfabrication. Sens. Actuators B Chem. 2020, 304, 127345. [Google Scholar] [CrossRef]
- Chen, L.; Dong, Y.; Tang, C.Y.; Zhong, L.; Law, W.C.; Tsui, G.C.P.; Yang, Y.; Xie, X. Development of Direct-Laser-Printable Light-Powered Nanocomposites. ACS Appl. Mater. Interfaces 2019, 11, 19541–19553. [Google Scholar] [CrossRef]
- Hu, K.; Yang, L.; Jin, D.; Li, J.; Ji, S.; Xin, C.; Hu, Y.; Wu, D.; Zhang, L.; Chu, J. Tunable microfluidic device fabricated by femtosecond structured light for particle and cell manipulation. Lab Chip 2019, 19, 3988–3996. [Google Scholar] [CrossRef]
- Li, R.; Jin, D.; Pan, D.; Ji, S.; Xin, C.; Liu, G.; Fan, S.; Wu, H.; Li, J.; Hu, Y.; et al. Stimuli-Responsive Actuator Fabricated by Dynamic Asymmetric Femtosecond Bessel Beam for In Situ Particle and Cell Manipulation. ACS Nano 2020, 14, 5233–5242. [Google Scholar] [CrossRef]
- Hu, Y.; Wang, Z.; Jin, D.; Zhang, C.; Sun, R.; Li, Z.; Hu, K.; Ni, J.; Cai, Z.; Pan, D.; et al. Botanical-Inspired 4D Printing of Hydrogel at the Microscale. Adv. Funct. Mater. 2020, 30, 1907377. [Google Scholar] [CrossRef]
- Hu, Y.L.; Yuan, H.W.; Liu, S.L.; Ni, J.C.; Lao, Z.X.; Xin, C.; Pan, D.; Zhang, Y.Y.; Zhu, W.L.; Li, J.W.; et al. Chiral Assemblies of Laser-Printed Micropillars Directed by Asymmetrical Capillary Force. Adv. Mater. 2020, 32, 2002356. [Google Scholar] [CrossRef] [PubMed]
- Lao, Z.; Zheng, Y.; Dai, Y.; Hu, Y.; Ni, J.; Ji, S.; Cai, Z.; Smith, Z.J.; Li, J.; Zhang, L.; et al. Nanogap Plasmonic Structures Fabricated by Switchable Capillary-Force Driven Self-Assembly for Localized Sensing of Anticancer Medicines with Microfluidic SERS. Adv. Funct. Mater. 2020, 30, 1909467. [Google Scholar] [CrossRef]
- Liu, X.J.; Gu, H.C.; Ding, H.B.; Du, X.; Wei, M.X.; Chen, Q.; Gu, Z.Z. 3D Bioinspired Microstructures for Switchable Repellency in both Air and Liquid. Adv. Sci. 2020, 7, 2000878. [Google Scholar] [CrossRef] [PubMed]
- Hu, Y.; Lao, Z.; Cumming, B.P.; Wu, D.; Li, J.; Liang, H.; Chu, J.; Huang, W.; Gu, M. Laser printing hierarchical structures with the aid of controlled capillary-driven self-assembly. Proc. Natl. Acad. Sci. USA 2015, 112, 6876–6881. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lao, Z.; Pan, D.; Yuan, H.; Ni, J.; Ji, S.; Zhu, W.; Hu, Y.; Li, J.; Wu, D.; Chu, J. Mechanical-Tunable Capillary-Force-Driven Self-Assembled Hierarchical Structures on Soft Substrate. ACS Nano 2018, 12, 10142–10150. [Google Scholar] [CrossRef]
- Power, M.; Thompson, A.J.; Anastasova, S.; Yang, G.Z. A Monolithic Force-Sensitive 3D Microgripper Fabricated on the Tip of an Optical Fiber Using 2-Photon Polymerization. Small 2018, 14, e1703964. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vizsnyiczai, G.; Frangipane, G.; Maggi, C.; Saglimbeni, F.; Bianchi, S.; Di Leonardo, R. Light controlled 3D micromotors powered by bacteria. Nat. Commun. 2017, 8, 15974. [Google Scholar] [CrossRef] [PubMed]
- Jia, H.; Mailand, E.; Zhou, J.; Huang, Z.; Dietler, G.; Kolinski, J.M.; Wang, X.; Sakar, M.S. Universal Soft Robotic Microgripper. Small 2019, 15, e1803870. [Google Scholar] [CrossRef] [Green Version]
- Hippler, M.; Blasco, E.; Qu, J.; Tanaka, M.; Barner-Kowollik, C.; Wegener, M.; Bastmeyer, M. Controlling the shape of 3D microstructures by temperature and light. Nat. Commun. 2019, 10, 232. [Google Scholar] [CrossRef] [Green Version]
- Del Pozo, M.; Delaney, C.; Bastiaansen, C.W.M.; Diamond, D.; Schenning, A.; Florea, L. Direct Laser Writing of Four-Dimensional Structural Color Microactuators Using a Photonic Photoresist. ACS Nano 2020, 14, 9832–9839. [Google Scholar] [CrossRef]
- Kagan, D.; Balasubramanian, S.; Wang, J. Chemically triggered swarming of gold microparticles. Angew. Chem. Int. Ed. 2011, 50, 503–506. [Google Scholar] [CrossRef] [PubMed]
- Xu, T.; Soto, F.; Gao, W.; Dong, R.; Garcia-Gradilla, V.; Magana, E.; Zhang, X.; Wang, J. Reversible swarming and separation of self-propelled chemically powered nanomotors under acoustic fields. J. Am. Chem. Soc. 2015, 137, 2163–2166. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Ji, F.; Yu, J.; Yang, L.; Wang, Q.; Zhang, L. Bubble-Assisted Three-Dimensional Ensemble of Nanomotors for Improved Catalytic Performance. iScience 2019, 19, 760–771. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Baker, R.D.; Montenegro-Johnson, T.; Sediako, A.D.; Thomson, M.J.; Sen, A.; Lauga, E.; Aranson, I.S. Shape-programmed 3D printed swimming microtori for the transport of passive and active agents. Nat. Commun. 2019, 10, 4932. [Google Scholar] [CrossRef]
- Chen, Y.; Xu, B.; Mei, Y. Design and Fabrication of Tubular Micro/Nanomotors via 3D Laser Lithography. Chem. Asian J. 2019, 14, 2472–2478. [Google Scholar] [CrossRef] [PubMed]
- Belling, J.N.; Heidenreich, L.K.; Tian, Z.; Mendoza, A.M.; Chiou, T.T.; Gong, Y.; Chen, N.Y.; Young, T.D.; Wattanatorn, N.; Park, J.H.; et al. Acoustofluidic sonoporation for gene delivery to human hematopoietic stem and progenitor cells. Proc. Natl. Acad. Sci. USA 2020, 117, 10976–10982. [Google Scholar] [CrossRef] [PubMed]
- Ozcelik, A.; Rufo, J.; Guo, F.; Gu, Y.; Li, P.; Lata, J.; Huang, T.J. Acoustic tweezers for the life sciences. Nat. Methods 2018, 15, 1021–1028. [Google Scholar] [CrossRef] [Green Version]
- Zhang, P.; Bachman, H.; Ozcelik, A.; Huang, T.J. Acoustic Microfluidics. Annu. Rev. Anal. Chem. 2020, 13, 17–43. [Google Scholar] [CrossRef] [PubMed]
- Aliabouzar, M.; Zhang, L.G.; Sarkar, K. Lipid Coated Microbubbles and Low Intensity Pulsed Ultrasound Enhance Chondrogenesis of Human Mesenchymal Stem Cells in 3D Printed Scaffolds. Sci. Rep. 2016, 6, 37728. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- De Avila, B.E.F.; Angsantikul, P.; Ramirez-Herrera, D.E.; Soto, F.; Teymourian, H.; Dehaini, D.; Chen, Y.J.; Zhang, L.F.; Wang, J. Hybrid biomembrane-functionalized nanorobots for concurrent removal of pathogenic bacteria and toxins. Sci. Robot. 2018, 3, eaat0485. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, Q.; Zhang, L. Ultrasound Imaging and Tracking of Micro/Nanorobots: From Individual to Collectives. IEEE Open J. Nanotechnol. 2020, 1, 6–17. [Google Scholar] [CrossRef]
- Li, M.; Liu, Y.; Zhao, X.; Gao, R.; Li, Y.; Qu, S. High sensitivity fiber acoustic sensor tip working at 1550 nm fabricated by two-photon polymerization technique. Sens. Actuators A Phys. 2017, 260, 29–34. [Google Scholar] [CrossRef]
- Barik, A.; Zhang, Y.; Grassi, R.; Nadappuram, B.P.; Edel, J.B.; Low, T.; Koester, S.J.; Oh, S.H. Graphene-edge dielectrophoretic tweezers for trapping of biomolecules. Nat. Commun. 2017, 8, 1867. [Google Scholar] [CrossRef]
- Mao, G.; Drack, M.; Karami-Mosammam, M.; Wirthl, D.; Stockinger, T.; Schwödiauer, R.; Kaltenbrunner, M. Soft electromagnetic actuators. Sci. Adv. 2020, 6, eabc0251. [Google Scholar] [CrossRef]
- Chortos, A.; Hajiesmaili, E.; Morales, J.; Clarke, D.R.; Lewis, J.A. 3D Printing of Interdigitated Dielectric Elastomer Actuators. Adv. Funct. Mater. 2019, 30, 1907375. [Google Scholar] [CrossRef]
- Morales, D.; Palleau, E.; Dickey, M.D.; Velev, O.D. Electro-actuated hydrogel walkers with dual responsive legs. Soft Matter 2014, 10, 1337–1348. [Google Scholar] [CrossRef]
- Yang, C.; Wang, W.; Yao, C.; Xie, R.; Ju, X.J.; Liu, Z.; Chu, L.Y. Hydrogel Walkers with Electro-Driven Motility for Cargo Transport. Sci. Rep. 2015, 5, 13622. [Google Scholar] [CrossRef] [Green Version]
- Choi, M.Y.; Shin, Y.; Lee, H.S.; Kim, S.Y.; Na, J.H. Multipolar spatial electric field modulation for freeform electroactive hydrogel actuation. Sci. Rep. 2020, 10, 2482. [Google Scholar] [CrossRef] [Green Version]
- Lao, Z.; Sun, R.; Jin, D.; Ren, Z.; Xin, C.; Zhang, Y.; Jiang, S.; Zhang, Y.; Zhang, L. Encryption/decryption and microtarget capturing by pH driven Janus microstructures fabricated by same femtosecond laser printing parameters. Int. J. Extrem. Manuf. 2021, 3, 025001. [Google Scholar] [CrossRef]
- Carlotti, M.; Mattoli, V. Functional Materials for Two-Photon Polymerization in Microfabrication. Small 2019, 15, e1902687. [Google Scholar] [CrossRef]
- Manouras, T.; Vamvakaki, M. Field responsive materials: Photo-, electro-, magnetic- and ultrasound-sensitive polymers. Polym. Chem. 2017, 8, 74–96. [Google Scholar] [CrossRef]
- Wang, T.; Torres, D.; Fernández, F.E.; Wang, C.; Sepúlveda, N. Maximizing the performance of photothermal actuators by combining smart materials with supplementary advantages. Sci. Adv. 2017, 3, e1602697. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yeung, K.-W.; Dong, Y.; Chen, L.; Tang, C.-Y.; Law, W.-C.; Tsui, G.C.-P.; Engstrøm, D.S. Printability of photo-sensitive nanocomposites using two-photon polymerization. Nanotechnol. Rev. 2020, 9, 418–426. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, L. Motion Control in Magnetic Microrobotics: From Individual and Multiple Robots to Swarms. Annu. Rev. Control Robot. Auton. Syst. 2020, 4, 1–26. [Google Scholar] [CrossRef]
- Wang, Q.; Yang, L.; Yu, J.; Chiu, P.W.Y.; Zheng, Y.P.; Zhang, L. Real-Time Magnetic Navigation of a Rotating Colloidal Microswarm Under Ultrasound Guidance. IEEE Trans. Biomed. Eng. 2020, 67, 3403–3412. [Google Scholar] [CrossRef] [PubMed]
- Yang, L.; Yu, J.; Zhang, L. Statistics-Based Automated Control for a Swarm of Paramagnetic Nanoparticles in 2-D Space. IEEE Trans. Robot. 2020, 36, 254–270. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, Y.; Wang, Q.; Chan, K.-F.; Zhang, L. Automated Control of Magnetic Spore-Based Microrobot Using Fluorescence Imaging for Targeted Delivery With Cellular Resolution. IEEE Trans. Autom. Sci. Eng. 2020, 17, 490–501. [Google Scholar] [CrossRef]
- Alcantara, C.C.J.; Landers, F.C.; Kim, S.; De Marco, C.; Ahmed, D.; Nelson, B.J.; Pane, S. Mechanically interlocked 3D multi-material micromachines. Nat. Commun. 2020, 11, 5957. [Google Scholar] [CrossRef]
- Zhang, C.; Lu, X.; Fei, G.; Wang, Z.; Xia, H.; Zhao, Y. 4D Printing of a Liquid Crystal Elastomer with a Controllable Orientation Gradient. ACS Appl. Mater. Interfaces 2019, 11, 44774–44782. [Google Scholar] [CrossRef]
- Chen, P.; Wei, B.Y.; Hu, W.; Lu, Y.Q. Liquid-Crystal-Mediated Geometric Phase: From Transmissive to Broadband Reflective Planar Optics. Adv. Mater. 2019, e1903665. [Google Scholar] [CrossRef]
- Yang, H.; Leow, W.R.; Wang, T.; Wang, J.; Yu, J.; He, K.; Qi, D.; Wan, C.; Chen, X. 3D Printed Photoresponsive Devices Based on Shape Memory Composites. Adv. Mater. 2017, 29, 1701627. [Google Scholar] [CrossRef]
- Wang, X.; Hu, C.; Schurz, L.; De Marco, C.; Chen, X.; Pane, S.; Nelson, B.J. Surface-Chemistry-Mediated Control of Individual Magnetic Helical Microswimmers in a Swarm. ACS Nano 2018, 12, 6210–6217. [Google Scholar] [CrossRef]
- Kim, E.; Yoo, S.J.; Kim, E.; Kwon, T.H.; Zhang, L.; Moon, C.; Choi, H. Nano-patterned SU-8 surface using nanosphere-lithography for enhanced neuronal cell growth. Nanotechnology 2016, 27, 175303. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, Y.; Zhang, L. Selective surface tension induced patterning on flexible textiles via click chemistry. Nanoscale 2017, 9, 4777–4786. [Google Scholar] [CrossRef] [PubMed]
- Kang, H.; Jung, H.J.; Wong, D.S.H.; Kim, S.K.; Lin, S.; Chan, K.F.; Zhang, L.; Li, G.; Dravid, V.P.; Bian, L. Remote Control of Heterodimeric Magnetic Nanoswitch Regulates the Adhesion and Differentiation of Stem Cells. J. Am. Chem. Soc. 2018, 140, 5909–5913. [Google Scholar] [CrossRef]
- Ye, C.; Liu, J.; Wu, X.; Wang, B.; Zhang, L.; Zheng, Y.; Xu, T. Hydrophobicity Influence on Swimming Performance of Magnetically Driven Miniature Helical Swimmers. Micromachines 2019, 10, 175. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Gao, C.; Zhou, C.; Lin, Z.; He, Q. Leukocyte Membrane-Coated Liquid Metal Nanoswimmers for Actively Targeted Delivery and Synergistic Chemophotothermal Therapy. Research 2020, 2020, 3676954. [Google Scholar] [CrossRef]
- Alapan, Y.; Yasa, O.; Schauer, O.; Giltinan, J.; Tabak, A.F.; Sourjik, V.; Sitti, M. Soft erythrocyte-based bacterial microswimmers for cargo delivery. Sci. Robot. 2018, 3, eaar4423. [Google Scholar] [CrossRef] [Green Version]
- Cabanach, P.; Pena-Francesch, A.; Sheehan, D.; Bozuyuk, U.; Yasa, O.; Borros, S.; Sitti, M. Zwitterionic 3D-Printed Non-Immunogenic Stealth Microrobots. Adv. Mater. 2020, 32, e2003013. [Google Scholar] [CrossRef]
- Wong, D.S.; Li, J.; Yan, X.; Wang, B.; Li, R.; Zhang, L.; Bian, L. Magnetically Tuning Tether Mobility of Integrin Ligand Regulates Adhesion, Spreading, and Differentiation of Stem Cells. Nano Lett. 2017, 17, 1685–1695. [Google Scholar] [CrossRef]
- Yan, X.; Zhou, Q.; Yu, J.; Xu, T.; Deng, Y.; Tang, T.; Feng, Q.; Bian, L.; Zhang, Y.; Ferreira, A.; et al. Magnetite Nanostructured Porous Hollow Helical Microswimmers for Targeted Delivery. Adv. Funct. Mater. 2015, 25, 5333–5342. [Google Scholar] [CrossRef]
- Yan, X.; Zhou, Q.; Vincent, M.; Deng, Y.; Yu, J.; Xu, J.; Xu, T.; Tang, T.; Bian, L.; Wang, Y.J.; et al. Multifunctional biohybrid magnetite microrobots for imaging-guided therapy. Sci. Robot. 2017, 2, eaar4423. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Oran, D.; Rodriques, S.G.; Gao, R.; Asano, S.; Skylar-Scott, M.A.; Chen, F.; Tillberg, P.W.; Marblestone, A.H.; Boyden, E.S. 3D nanofabrication by volumetric deposition and controlled shrinkage of patterned scaffolds. Science 2018, 362, 1281–1285. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dai, L.; Huang, X.; Zhang, L.; Zhang, L.; Ge, L. Mechanical properties of normal and binormal double nanohelices. RSC Adv. 2015, 5, 4069–4076. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, L.; Kim, S.M.; Park, S. Helical metallic micro- and nanostructures: Fabrication and application. Nanoscale 2014, 6, 9355–9365. [Google Scholar] [CrossRef] [PubMed]
- Dai, L.; Zhu, K.D.; Shen, W.; Huang, X.; Zhang, L.; Goriely, A. Controllable rotational inversion in nanostructures with dual chirality. Nanoscale 2018, 10, 6343–6348. [Google Scholar] [CrossRef] [PubMed]
- Dong, Y.; Wang, L.; Wang, J.; Wang, S.; Wang, Y.; Jin, D.; Chen, P.; Du, W.; Zhang, L.; Liu, B.F. Graphene-Based Helical Micromotors Constructed by “Microscale Liquid Rope-Coil Effect” with Microfluidics. ACS Nano 2020, 14, 16600–16613. [Google Scholar] [CrossRef]
- Xu, T.; Yu, J.; Vong, C.-I.; Wang, B.; Wu, X.; Zhang, L. Dynamic Morphology and Swimming Properties of Rotating Miniature Swimmers With Soft Tails. IEEE ASME Trans. Mechatron. 2019, 24, 924–934. [Google Scholar] [CrossRef]
- Huang, T.-Y.; Huang, H.-W.; Jin, D.D.; Chen, Q.Y.; Huang, J.Y.; Zhang, L.; Duan, H.L. Four-dimensional micro-building blocks. Sci. Adv. 2020, 6, eaav8219. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.Z.; Wang, L.; Fan, H.; Yu, Y.H.; Sun, H.B.; Juodkazis, S.; Chen, Q.D. O-FIB: Far-field-induced near-field breakdown for direct nanowriting in an atmospheric environment. Light Sci. Appl. 2020, 9, 41. [Google Scholar] [CrossRef] [Green Version]
- Gong, J.; Schuurmans, C.C.L.; Genderen, A.M.V.; Cao, X.; Li, W.; Cheng, F.; He, J.J.; Lopez, A.; Huerta, V.; Manriquez, J.; et al. Complexation-induced resolution enhancement of 3D-printed hydrogel constructs. Nat. Commun. 2020, 11, 1267. [Google Scholar] [CrossRef] [PubMed]
- Ge, Q.; Li, Z.Q.; Wang, Z.L.; Kowsari, K.; Zhang, W.; He, X.; Zhou, J.; Fang, X. Projection micro stereolithography based 3D printing and its applications. Int. J. Extrem. Manuf. 2020, 2, 022004. [Google Scholar] [CrossRef]
- Traugutt, N.A.; Mistry, D.; Luo, C.; Yu, K.; Ge, Q.; Yakacki, C.M. Liquid-Crystal-Elastomer-Based Dissipative Structures by Digital Light Processing 3D Printing. Adv. Mater. 2020, 32, e2000797. [Google Scholar] [CrossRef] [PubMed]
- Cai, Z.; Qi, X.; Pan, D.; Ji, S.; Ni, J.; Lao, Z.; Xin, C.; Li, J.; Hu, Y.; Wu, D.; et al. Dynamic Airy imaging through high-efficiency broadband phase microelements by femtosecond laser direct writing. Photonics Res. 2020, 8, 875–883. [Google Scholar] [CrossRef]
- Hu, Y.; Wang, Z.; Wang, X.; Ji, S.; Zhang, C.; Li, J.; Zhu, W.; Wu, D.; Chu, J. Efficient full-path optical calculation of scalar and vector diffraction using the Bluestein method. Light Sci. Appl. 2020, 9, 119. [Google Scholar] [CrossRef] [PubMed]
- Pan, D.; Xu, B.; Liu, S.; Li, J.; Hu, Y.; Wu, D.; Chu, J. Amplitude-phase optimized long depth of focus femtosecond axilens beam for single-exposure fabrication of high-aspect-ratio microstructures. Opt. Lett. 2020, 45, 2584–2587. [Google Scholar] [CrossRef] [PubMed]
- Hu, Y.; Feng, W.; Xue, C.; Lao, Z.; Ji, S.; Cai, Z.; Zhu, W.; Li, J.; Wu, D.; Chu, J. Self-assembled micropillars fabricated by holographic femtosecond multi-foci beams forin situ trapping of microparticles. Opt. Lett. 2020, 45, 4698–4701. [Google Scholar] [CrossRef]
- Saha, S.K.; Wang, D.; Nguyen, V.H.; Chang, Y.; Oakdale, J.S.; Chen, S.C. Scalable submicrometer additive manufacturing. Science 2019, 366, 105–109. [Google Scholar] [CrossRef]
- Wang, C.; Yang, L.; Hu, Y.; Rao, S.; Wang, Y.; Pan, D.; Ji, S.; Zhang, C.; Su, Y.; Zhu, W.; et al. Femtosecond Mathieu Beams for Rapid Controllable Fabrication of Complex Microcages and Application in Trapping Microobjects. ACS Nano 2019, 13, 4667–4676. [Google Scholar] [CrossRef]
- Ni, J.C.; Wang, Z.Y.; Li, Z.Q.; Lao, Z.X.; Hu, Y.L.; Ji, S.Y.; Xu, B.; Zhang, C.C.; Li, J.W.; Wu, D.; et al. Multifurcate Assembly of Slanted Micropillars Fabricated by Superposition of Optical Vortices and Application in High-Efficiency Trapping Microparticles. Adv. Funct. Mater. 2017, 27, 1701939. [Google Scholar] [CrossRef]
- Hines, L.; Petersen, K.; Lum, G.Z.; Sitti, M. Soft Actuators for Small-Scale Robotics. Adv. Mater. 2017, 29, 1603483. [Google Scholar] [CrossRef] [PubMed]
- Wang, B.; Chan, K.F.; Yuan, K.; Wang, Q.; Xia, X.; Yang, L.; Ko, H.; Wang, Y.-X.J.; Sung, J.J.Y.; Chiu, P.W.Y.; et al. Endoscopy-assisted magnetic navigation of biohybrid soft microrobots with rapid endoluminal delivery and imaging. Sci. Robot. 2021, 6, eabd2813. [Google Scholar] [CrossRef]
- Ji, F.; Li, T.; Yu, S.; Wu, Z.; Zhang, L. Propulsion Gait Analysis and Fluidic Trapping of Swinging Flexible Nanomotors. ACS Nano 2021, 15, 5118–5128. [Google Scholar] [CrossRef]
- Zhou, H.; Mayorga-Martinez, C.C.; Pane, S.; Zhang, L.; Pumera, M. Magnetically Driven Micro and Nanorobots. Chem. Rev. 2021. [Google Scholar] [CrossRef]
- Dong, Y.; Wang, L.; Yuan, K.; Ji, F.; Gao, J.; Zhang, Z.; Du, X.; Tian, Y.; Wang, Q.; Zhang, L. Magnetic Microswarm Composed of Porous Nanocatalysts for Targeted Elimination of Biofilm Occlusion. ACS Nano 2021, 15, 5056–5067. [Google Scholar] [CrossRef] [PubMed]
- Du, X.; Yu, J.; Jin, D.; Chiu, P.W.Y.; Zhang, L. Independent Pattern Formation of Nanorod and Nanoparticle Swarms under an Oscillating Field. ACS Nano 2021, 15, 4429–4439. [Google Scholar] [CrossRef]
- Jin, D.; Yu, J.; Yuan, K.; Zhang, L. Mimicking the Structure and Function of Ant Bridges in a Reconfigurable Microswarm for Electronic Applications. ACS Nano 2019, 13, 5999–6007. [Google Scholar] [CrossRef] [PubMed]
- Yang, L.; Wang, Q.; Vong, C.-I.; Zhang, L. A Miniature Flexible-Link Magnetic Swimming Robot with Two Vibration Modes: Design, Modeling and Characterization. IEEE Robot. Autom. Let. 2017, 2, 2024–2031. [Google Scholar] [CrossRef]
- Du, X.; Zhang, M.; Yu, J.; Yang, L.; Chiu, W.Y.P.; Zhang, L. Design and Real-time Optimization for a Magnetic Actuation System with Enhanced Flexibility. IEEE-ASME Trans. Mechatron. 2020. [Google Scholar] [CrossRef]
- Wu, X.; Liu, J.; Huang, C.; Su, M.; Xu, T. 3-D Path Following of Helical Microswimmers With an Adaptive Orientation Compensation Model. IEEE Trans. Autom. Sci. Eng. 2020, 17, 823–832. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, L.; Yang, L.; Vong, C.I.; Chan, K.F.; Wu, W.K.K.; Kwong, T.N.Y.; Lo, N.W.S.; Ip, M.; Wong, S.H.; et al. Real-time tracking of fluorescent magnetic spore-based microrobots for remote detection of C. diff toxins. Sci. Adv. 2019, 5, eaau9650. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Yang, L.; Zhang, L. 3-D Visual Servoing of Magnetic Miniature Swimmers Using Parallel Mobile Coils. IEEE Trans. Med. Robot. Bionics 2020, 2, 608–618. [Google Scholar] [CrossRef]
- Wang, Q.; Chan, K.F.; Schweizer, K.; Du, X.; Jin, D.; Yu, S.C.H.; Nelson, B.J.; Zhang, L. Ultrasound Doppler-guided real-time navigation of a magnetic microswarm for active endovascular delivery. Sci. Adv. 2021, 7, eabe5914. [Google Scholar] [CrossRef]
- Xu, T.; Guan, Y.; Liu, J.; Wu, X. Image-Based Visual Servoing of Helical Microswimmers for Planar Path Following. IEEE Trans. Autom. Sci. Eng. 2020, 17, 325–333. [Google Scholar] [CrossRef]
- Greenhall, J.; Raeymaekers, B. 3D Printing Macroscale Engineered Materials Using Ultrasound Directed Self-Assembly and Stereolithography. Adv. Mater. Technol. 2017, 2, 1700122. [Google Scholar] [CrossRef]
- Ding, X.; Lin, S.C.; Kiraly, B.; Yue, H.; Li, S.; Chiang, I.K.; Shi, J.; Benkovic, S.J.; Huang, T.J. On-chip manipulation of single microparticles, cells, and organisms using surface acoustic waves. Proc. Natl. Acad. Sci. USA 2012, 109, 11105–11109. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gu, Y.; Chen, C.; Rufo, J.; Shen, C.; Wang, Z.; Huang, P.H.; Fu, H.; Zhang, P.; Cummer, S.A.; Tian, Z.; et al. Acoustofluidic Holography for Micro- to Nanoscale Particle Manipulation. ACS Nano 2020, 14, 14635–14645. [Google Scholar] [CrossRef] [PubMed]
- Ma, Y.; Sikdar, D.; Fedosyuk, A.; Velleman, L.; Klemme, D.J.; Oh, S.H.; Kucernak, A.R.J.; Kornyshev, A.A.; Edel, J.B. Electrotunable Nanoplasmonics for Amplified Surface Enhanced Raman Spectroscopy. ACS Nano 2020, 14, 328–336. [Google Scholar] [CrossRef]
- Alblalaihid, K.; Overton, J.; Lawes, S.; Kinnell, P. A 3D-printed polymer micro-gripper with self-defined electrical tracks and thermal actuator. J. Micromech. Microeng. 2017, 27, 045019. [Google Scholar] [CrossRef] [Green Version]
- Cheng, J.; Chen, Y.; Wu, J.W.; Ji, X.R.; Wu, S.H. 3D Printing of BaTiO3 Piezoelectric Ceramics for a Focused Ultrasonic Array. Sensors 2019, 19, 4078. [Google Scholar] [CrossRef] [Green Version]
- Park, Y.-G.; An, H.S.; Kim, J.-Y.; Park, J.-U. High-resolution, reconfigurable printing of liquid metals with three-dimensional structures. Sci. Adv. 2019, 5, eaaw2844. [Google Scholar] [CrossRef] [Green Version]
- Todaro, C.J.; Easton, M.A.; Qiu, D.; Zhang, D.; Bermingham, M.J.; Lui, E.W.; Brandt, M.; StJohn, D.H.; Qian, M. Grain structure control during metal 3D printing by high-intensity ultrasound. Nat. Commun. 2020, 11, 142. [Google Scholar] [CrossRef]
- Fogel, O.; Winter, S.; Benjamin, E.; Krylov, S.; Kotler, Z.; Zalevsky, Z. 3D printing of functional metallic microstructures and its implementation in electrothermal actuators. Add. Manuf. 2018, 21, 307–311. [Google Scholar] [CrossRef]
- Valentine, A.D.; Busbee, T.A.; Boley, J.W.; Raney, J.R.; Chortos, A.; Kotikian, A.; Berrigan, J.D.; Durstock, M.F.; Lewis, J.A. Hybrid 3D Printing of Soft Electronics. Adv. Mater. 2017, 29, 1703817. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Golod, S.V.; Deckardt, E.; Prinz, V.; Grützmacher, D. Free-standing Si/SiGe micro- and nano-objects. Phys. E 2004, 23, 280–284. [Google Scholar] [CrossRef]
- Zhang, L.; Dong, L.; Bell, D.J.; Nelson, B.J.; Schönenberger, C.; Grützmacher, D. Fabrication and characterization of freestanding Si/Cr micro-and nanospirals. Microelectron. Eng. 2006, 83, 1237–1240. [Google Scholar] [CrossRef]
- Zhang, L.; Deckhardt, E.; Weber, A.; Schönenberger, C.; Grützmacher, D. Controllable fabrication of SiGe/Si and SiGe/Si/Cr helical nanobelts. Nanotechnology 2005, 16, 655. [Google Scholar] [CrossRef]
- Zhang, L.; Ruh, E.; Grützmacher, D.; Dong, L.; Bell, D.J.; Nelson, B.J.; Schönenberger, C. Anomalous coiling of sige/si and sige/si/cr helical nanobelts. Nano Lett. 2006, 6, 1311–1317. [Google Scholar] [CrossRef] [PubMed]
- Bell, D.J.; Sun, Y.; Zhang, L.; Dong, L.X.; Nelson, B.J.; Grützmacher, D. Three-dimensional nanosprings for electromechanical sensors. Sens. Actuators A Phys. 2006, 130, 54–61. [Google Scholar] [CrossRef]
- Qian, D.; Yang, L.; Zhang, Y.; Xin, C.; Hu, Z.; Hu, K.; Wang, Y.; Pan, D.; Li, J.; Wu, D.; et al. Flexible and rapid fabrication of silver microheaters with spatial-modulated multifoci by femtosecond laser multiphoton reduction. Opt. Lett. 2018, 43, 5335–5338. [Google Scholar] [CrossRef] [Green Version]
- Zhu, M.; Schmidt, O.G. Tiny robots and sensors need tiny batteries—Here’s how to do it. Nature 2021, 589, 195–197. [Google Scholar] [CrossRef] [PubMed]
- Gao, Y.Y.; Zhang, Y.L.; Han, B.; Zhu, L.; Dong, B.; Sun, H.B. Gradient Assembly of Polymer Nanospheres and Graphene Oxide Sheets for Dual-Responsive Soft Actuators. ACS Appl. Mater. Interfaces 2019, 11, 37130–37138. [Google Scholar] [CrossRef]
- Lu, H.; Zhang, M.; Yang, Y.; Huang, Q.; Fukuda, T.; Wang, Z.; Shen, Y. A bioinspired multilegged soft millirobot that functions in both dry and wet conditions. Nat. Commun. 2018, 9, 3944. [Google Scholar] [CrossRef] [Green Version]
- Nocentini, S.; Parmeggiani, C.; Martella, D.; Wiersma, D.S. Optically Driven Soft Micro Robotics. Adv. Opt. Mater. 2018, 6, 1800207. [Google Scholar] [CrossRef]
- Ji, F.; Jin, D.; Wang, B.; Zhang, L. Light-Driven Hovering of a Magnetic Microswarm in Fluid. ACS Nano 2020, 14, 6990–6998. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Strategy | Resolution | Size | Material | Speed | Ref. |
|---|---|---|---|---|---|---|
| TPP | Direct writing | <500 nm | <mm | Single | Slow | [50] |
| SLM | <500 nm | <mm | Single | Fast | [51] | |
| Ink printing | Liquid ink | 50 μm | >cm | Multi | Slow | [52] |
| Digital light processing | Point scanning | 10 μm | cm | Single | Slow | [53] |
| Stereolithography | Layer | 2 μm (x/y) | mm | Single | Medium | [54] |
| Liquid interface lithography | Layer | 10 μm | cm | Single | Fast | [55] |
| Volumetric printing | Volumetric | 50 μm | mm | Single | Very fast | [56] |
| Two-light printing | Layer | 10 μm | cm | Single | fast | [57] |
| Driving Method | Control | Remarkable Superiority | Demerit | |||
|---|---|---|---|---|---|---|
| Biological Penetration | Swarm | Separate from Swarm | Remote | |||
| Magnetic | √ | √ | × | √ |
|
|
| Light | Difficult | √ | √ | √ |
|
|
| pH | × | √ | × | × |
|
|
| Microforce | × | Difficult | √ | × |
|
|
| Heat | Difficult | √ | Difficult | √ |
|
|
| Solution | × | √ | × | × |
|
|
| Acoustic | √ | √ | Difficult | √ |
|
|
| Electric | × | √ | √ | √ |
|
|
| Driving Method | Shape and Fabrication Method | Response Time | Application | ||||
|---|---|---|---|---|---|---|---|
| Shape | Feature Size | Fabrication | |||||
| (μm) | Method | Material | Time | ||||
| Magnetic | Helix [41] | 10 × 8.5 × 2 | DLW | SU-8/IP-L | - | Real time | Delivery |
| Helix [69] | 16 × 5 × 2 | DLW | IP-L | - | |||
| Helix [70] | 10 × 5 × 1.5 | DLW | IP-L | - | |||
| Screw [71] | 70 × 40 × 5 | DLW | TMPETA | - | |||
| Hollow helix [72] | 75 × 15 × 5 | FE-DLW | SZ2080 | 10 s | |||
| Tube [73] | 80 × 25 × 1 | FE-DLW | SZ2080 | 10 s | |||
| Light | Gear [82] | 20 × 20 × 2 | DLW | - | - | - | Photonic |
| Cantilever [83] | 50 × 16 × 1.5 | DLW | NIPAM-gel | - | 0.03 s | - | |
| Gripper [84] | 60 × 60 × 1.5 | DLW | LCE | - | 2 s | - | |
| pH | Tuber [85] | 50 × 10 × 3 | FE-DLW | Hydrogel | 10 s | <1 s | Microfluidic |
| Tuber [86] | 50 × 10 × 3 | FE-DLW | 10 s | Trapping | |||
| Cantilever [24] | 60 × 10 × 2 | DLW | 0.5 h | - | |||
| Flower/Cage [87] | 60 × 15 × 3 | DLW | 0.5 h | Trapping | |||
| Microforce | Pillar [91] | 6 × 0.8 × 0.8 | DLW | SZ2080 | 1 s | 1 s | Trapping |
| Gripper [93] | 50 × 50 × 60 | DLW | IP-Dip | - | Real time | Trapping | |
| Gear [94] | 3 × 15 × 15 | MF-DLW | SU-8 | ~0.5 h | 10 s | - | |
| Heat | Cantilever [96] | 70 × 5 × 10 | DLW | pNIPAM | - | - | - |
| Flower [97] | 6 × 70 × 70 | DLW | CLC | - | - | Photonic | |
| Solution | Rocket [102] | 10 × 20 × 0.5 | DLW | IP-L | - | - | - |
| Flower [97] | 6 × 70 × 70 | DLW | CLC | - | ~5 s | Photonic | |
| Acoustic | Cantilever [109] | 50 × 16 × 1.5 | DLW | SU-8 | - | Real time | Sensor |
| Electric | - | - | - | - | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lao, Z.; Xia, N.; Wang, S.; Xu, T.; Wu, X.; Zhang, L. Tethered and Untethered 3D Microactuators Fabricated by Two-Photon Polymerization: A Review. Micromachines 2021, 12, 465. https://doi.org/10.3390/mi12040465
Lao Z, Xia N, Wang S, Xu T, Wu X, Zhang L. Tethered and Untethered 3D Microactuators Fabricated by Two-Photon Polymerization: A Review. Micromachines. 2021; 12(4):465. https://doi.org/10.3390/mi12040465
Chicago/Turabian StyleLao, Zhaoxin, Neng Xia, Shijie Wang, Tiantian Xu, Xinyu Wu, and Li Zhang. 2021. "Tethered and Untethered 3D Microactuators Fabricated by Two-Photon Polymerization: A Review" Micromachines 12, no. 4: 465. https://doi.org/10.3390/mi12040465
APA StyleLao, Z., Xia, N., Wang, S., Xu, T., Wu, X., & Zhang, L. (2021). Tethered and Untethered 3D Microactuators Fabricated by Two-Photon Polymerization: A Review. Micromachines, 12(4), 465. https://doi.org/10.3390/mi12040465