
Recent Advances and Future Perspectives on Microfluidic Mix-and-Jet Sample Delivery Devices


Abstract
:1. Introduction
2. Design Considerations
2.1. Main Parameters for Nozzle Design
2.2. Main Parameters for Mixer Design
3. Fabrication Methods
3.1. Co-Axial Capillary Devices
3.2. Lithography-Based Microfluidics
3.3. Three-Dimensional Printed Microfluidic Devices
4. Characterisation Techniques
4.1. Jetting Analysis
4.2. Mixing Analysis
5. Summary and Perspectives
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhao, F.-Z.; Sun, B.; Yu, L.; Xiao, Q.-J.; Wang, Z.-J.; Chen, L.-L.; Liang, H.; Wang, Q.-S.; He, J.-H.; Yin, D.-C. A novel sample delivery system based on circular motion for in situ serial synchrotron crystallography. Lab Chip 2020, 20, 3888–3898. [Google Scholar] [CrossRef] [PubMed]
- Chapman, H.N. X-Ray Free-Electron Lasers for the Structure and Dynamics of Macromolecules. Annu. Rev. Biochem. 2019, 88, 35–58. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fenwick, R.B.; Esteban-Martín, S.; Salvatella, X. Understanding biomolecular motion, recognition, and allostery by use of conformational ensembles. Eur. Biophys. J. 2011, 40, 1339–1355. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ghazal, A.; Lafleur, J.P.; Mortensen, K.; Kutter, J.P.; Arleth, L.; Jensen, G.V. Recent advances in X-ray compatible microfluidics for applications in soft materials and life sciences. Lab Chip 2016, 16, 4263–4295. [Google Scholar] [CrossRef] [Green Version]
- Grunbein, M.L.; Nass Kovacs, G. Sample delivery for serial crystallography at free-electron lasers and synchrotrons. Acta Crystallogr. Sect. D 2019, 75, 178–191. [Google Scholar] [CrossRef]
- Ognjenović, J.; Grisshammer, R.; Subramaniam, S. Frontiers in Cryo Electron Microscopy of Complex Macromolecular Assemblies. Annu. Rev. Biomed. Eng. 2019, 21, 395–415. [Google Scholar] [CrossRef]
- Banerjee, A.; Bhakta, S.; Sengupta, J. Integrative approaches in cryogenic electron microscopy: Recent advances in structural biology and future perspectives. iScience 2021, 24, 102044. [Google Scholar] [CrossRef]
- Echelmeier, A.; Sonker, M.; Ros, A. Microfluidic sample delivery for serial crystallography using XFELs. Anal. Bioanal. Chem. 2019, 411, 6535–6547. [Google Scholar] [CrossRef]
- He, Y.; Wu, Y.; Fu, J.-Z.; Gao, Q.; Qiu, J.-J. Developments of 3D Printing Microfluidics and Applications in Chemistry and Biology: A Review. Electroanalysis 2016, 28, 1658–1678. [Google Scholar] [CrossRef]
- Nielsen, A.V.; Beauchamp, M.J.; Nordin, G.P.; Woolley, A.T. 3D Printed Microfluidics. Annu. Rev. Anal. Chem. 2020, 13, 45–65. [Google Scholar] [CrossRef]
- Waheed, S.; Cabot, J.M.; Macdonald, N.P.; Lewis, T.; Guijt, R.M.; Paull, B.; Breadmore, M.C. 3D printed microfluidic devices: Enablers and barriers. Lab Chip 2016, 16, 1993–2013. [Google Scholar] [CrossRef] [Green Version]
- Tasoglu, S.; Folch, A. Editorial for the Special Issue on 3D Printed Microfluidic Devices. Micromachines 2018, 9, 609. [Google Scholar] [CrossRef] [Green Version]
- Weisgrab, G.; Ovsianikov, A.; Costa, P.F. Functional 3D Printing for Microfluidic Chips. Adv. Mater. Technol. 2019, 4, 1900275. [Google Scholar] [CrossRef] [Green Version]
- Mehta, V.; Rath, S.N. 3D printed microfluidic devices: A review focused on four fundamental manufacturing approaches and implications on the field of healthcare. Bio Des. Manuf. 2021. [Google Scholar] [CrossRef]
- Cai, G.; Xue, L.; Zhang, H.; Lin, J. A Review on Micromixers. Micromachines 2017, 8, 274. [Google Scholar] [CrossRef]
- Suh, Y.K.; Kang, S. A Review on Mixing in Microfluidics. Micromachines 2010, 1, 82. [Google Scholar] [CrossRef]
- Mansur, E.A.; Ye, M.; Wang, Y.; Dai, Y. A State-of-the-Art Review of Mixing in Microfluidic Mixers. Chin. J. Chem. Eng. 2008, 16, 503–516. [Google Scholar] [CrossRef]
- Lee, C.-Y.; Chang, C.-L.; Wang, Y.-N.; Fu, L.-M. Microfluidic mixing: A review. Int. J. Mol. Sci. 2011, 12, 3263–3287. [Google Scholar] [CrossRef] [Green Version]
- Lee, C.-Y.; Wang, W.-T.; Liu, C.-C.; Fu, L.-M. Passive mixers in microfluidic systems: A review. Chem. Eng. J. 2016, 288, 146–160. [Google Scholar] [CrossRef]
- Dziubinski, M. Hydrodynamic Focusing in Microfluidic Devices. In Advances in Microfluidics; Kelly, R.T., Ed.; IntechOpen: London, UK, 2012; pp. 29–54. [Google Scholar] [CrossRef]
- Vega, E.J.; Montanero, J.M.; Herrada, M.A.; Gañán-Calvo, A.M. Global and local instability of flow focusing: The influence of the geometry. Phys. Fluids 2010, 22, 64105. [Google Scholar] [CrossRef]
- Gañán-Calvo, A.M. Generation of Steady Liquid Microthreads and Micron-Sized Monodisperse Sprays in Gas Streams. Phys. Rev. Lett. 1998, 80, 285–288. [Google Scholar] [CrossRef]
- Gañán-Calvo, A.M. Jetting–dripping transition of a liquid jet in a lower viscosity co-flowing immiscible liquid: The minimum flow rate in flow focusing. J. Fluid Mech. 2006, 553, 75–84. [Google Scholar] [CrossRef]
- Wiedorn, M.O.; Awel, S.; Morgan, A.J.; Ayyer, K.; Gevorkov, Y.; Fleckenstein, H.; Roth, N.; Adriano, L.; Bean, R.; Beyerlein, K.R.; et al. Rapid sample delivery for megahertz serial crystallography at X-ray FELs. IUCrJ 2018, 5, 574–584. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lu, Z.; McMahon, J.; Mohamed, H.; Barnard, D.; Shaikh, T.R.; Mannella, C.A.; Wagenknecht, T.; Lu, T.-M. Passive Microfluidic device for Sub Millisecond Mixing. Sens. Actuators B Chem. 2010, 144, 301–309. [Google Scholar] [CrossRef] [Green Version]
- Weierstall, U. Liquid sample delivery techniques for serial femtosecond crystallography. Philos. Trans. R. Soc. Lond. B Biol. Sci. 2014, 369, 20130337. [Google Scholar] [CrossRef] [Green Version]
- Calvey, G.D.; Katz, A.M.; Schaffer, C.B.; Pollack, L. Mixing injector enables time-resolved crystallography with high hit rate at X-ray free electron lasers. Struct. Dyn. 2016, 3, 054301. [Google Scholar] [CrossRef] [Green Version]
- Calvey, G.D.; Katz, A.M.; Pollack, L. Microfluidic Mixing Injector Holder Enables Routine Structural Enzymology Measurements with Mix-and-Inject Serial Crystallography Using X-ray Free Electron Lasers. Anal. Chem. 2019, 91, 7139–7144. [Google Scholar] [CrossRef]
- Cheng, R.K. Towards an Optimal Sample Delivery Method for Serial Crystallography at XFEL. Crystals 2020, 10, 215. [Google Scholar] [CrossRef] [Green Version]
- Beyerlein, K.R.; Adriano, L.; Heymann, M.; Kirian, R.; Knoška, J.; Wilde, F.; Chapman, H.N.; Bajt, S. Ceramic micro-injection molded nozzles for serial femtosecond crystallography sample delivery. Rev. Sci. Instrum. 2015, 86, 125104. [Google Scholar] [CrossRef] [Green Version]
- Zahoor, R.; Bajt, S.; Šarler, B. Influence of Gas Dynamic Virtual Nozzle Geometry on Micro-Jet Characteristics. Int. J. Multiph. Flow 2018, 104, 152–165. [Google Scholar] [CrossRef]
- Zahoor, R.; Belšak, G.; Bajt, S.; Šarler, B. Simulation of liquid micro-jet in free expanding high-speed co-flowing gas streams. Microfluid. Nanofluid. 2018, 22, 87. [Google Scholar] [CrossRef]
- Trebbin, M.; Krüger, K.; DePonte, D.; Roth, S.V.; Chapman, H.N.; Förster, S. Microfluidic Liquid Jet System with compatibility for atmospheric and high-vacuum conditions. Lab Chip 2014, 14, 1733–1745. [Google Scholar] [CrossRef]
- Feng, X.; Fu, Z.; Kaledhonkar, S.; Jia, Y.; Shah, B.; Jin, A.; Liu, Z.; Sun, M.; Chen, B.; Grassucci, R.A.; et al. A Fast and Effective Microfluidic Spraying-Plunging Method for High-Resolution Single-Particle Cryo-EM. Structure 2017, 25, 663–670. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Xiong, W.; Yu, N.; Yang, X. Continuous Jetting of Alginate Microfiber in Atmosphere Based on a Microfluidic Chip. Micromachines 2017, 8, 8. [Google Scholar] [CrossRef]
- Hofmann, E.; Krüger, K.; Haynl, C.; Scheibel, T.; Trebbin, M.; Förster, S. Microfluidic nozzle device for ultrafine fiber solution blow spinning with precise diameter control. Lab Chip 2018, 18, 2225–2234. [Google Scholar] [CrossRef]
- Marmiroli, B.; Grenci, G.; Cacho-Nerin, F.; Sartori, B.; Ferrari, E.; Laggner, P.; Businaro, L.; Amenitsch, H. Free jet micromixer to study fast chemical reactions by small angle X-ray scattering. Lab Chip 2009, 9, 2063–2069. [Google Scholar] [CrossRef]
- Koralek, J.D.; Kim, J.B.; Bruza, P.; Curry, C.B.; Chen, Z.; Bechtel, H.A. Generation and characterization of ultrathin free flowing liquid sheets. Nat. Commun. 2018, 9, 1353. [Google Scholar] [CrossRef] [Green Version]
- Hejazian, M.; Darmanin, C.; Balaur, E.; Abbey, B. Mixing and jetting analysis using continuous flow microfluidic sample delivery devices. RSC Adv. 2020, 10, 15694–15701. [Google Scholar] [CrossRef] [Green Version]
- Hejazian, M.; Balaur, E.; Flueckiger, L.; Hor, L.; Darmanin, C.; Abbey, B. Microfluidic mixing and jetting devices based on SU8 and glass for time-resolved molecular imaging experiments. In Proceedings of the Microfluidics, BioMEMS, and Medical Microsystems XVII, San Francisco, CA, USA, 2–4 February 2019; p. 108750D. [Google Scholar]
- Hejazian, M.; Balaur, E.; Abbey, B. A Numerical Study of Sub-Millisecond Integrated Mix-and-Inject Microfluidic Devices for Sample Delivery at Synchrotron and XFELs. Appl. Sci. 2021, 11, 3404. [Google Scholar] [CrossRef]
- Vakili, M.; Vasireddi, R.; Gwozdz, P.V.; Monteiro, D.C.F.; Heymann, M.; Blick, R.H.; Trebbin, M. Microfluidic polyimide gas dynamic virtual nozzles for serial crystallography. Rev. Sci. Instrum. 2020, 91, 85108. [Google Scholar] [CrossRef]
- Ho, C.M.B.; Ng, S.H.; Li, K.H.H.; Yoon, Y.-J. 3D printed microfluidics for biological applications. Lab Chip 2015, 15, 3627–3637. [Google Scholar] [CrossRef] [PubMed]
- Amin, R.; Knowlton, S.; Hart, A.; Yenilmez, B.; Ghaderinezhad, F.; Katebifar, S.; Messina, M.; Khademhosseini, A.; Tasoglu, S. 3D-printed microfluidic devices. Biofabrication 2016, 8, 022001. [Google Scholar] [CrossRef] [PubMed]
- Van den Driesche, S.; Lucklum, F.; Bunge, F.; Vellekoop, M.J. 3D Printing Solutions for Microfluidic Chip-To-World Connections. Micromachines 2018, 9, 71. [Google Scholar] [CrossRef] [Green Version]
- Nelson, G.; Kirian, R.A.; Weierstall, U.; Zatsepin, N.A.; Faragó, T.; Baumbach, T.; Wilde, F.; Niesler, F.B.; Zimmer, B.; Ishigami, I.; et al. Three-dimensional-printed gas dynamic virtual nozzles for x-ray laser sample delivery. Opt. Express 2016, 24, 11515–11530. [Google Scholar] [CrossRef]
- Galinis, G.; Strucka, J.; Barnard, J.C.T.; Braun, A.; Smith, R.A.; Marangos, J.P. Micrometer-thickness liquid sheet jets flowing in vacuum. Rev. Sci. Instrum. 2017, 88, 083117. [Google Scholar] [CrossRef]
- Wiedorn, M.O.; Oberthür, D.; Bean, R.; Schubert, R.; Werner, N.; Abbey, B. Megahertz serial crystallography. Nat. Commun. 2018, 9, 4025. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bohne, S.; Heymann, M.; Chapman, H.N.; Trieu, H.K.; Bajt, S. 3D printed nozzles on a silicon fluidic chip. Rev. Sci. Instrum. 2019, 90, 035108. [Google Scholar] [CrossRef]
- Nazari, R.; Zaare, S.; Alvarez, R.C.; Karpos, K.; Engelman, T.; Madsen, C.; Nelson, G.; Spence, J.C.H.; Weierstall, U.; Adrian, R.J.; et al. 3D printing of gas-dynamic virtual nozzles and optical characterization of high-speed microjets. Opt. Express 2020, 28, 21749–21765. [Google Scholar] [CrossRef] [PubMed]
- Knoska, J.; Adriano, L.; Awel, S.; Beyerlein, K.R.; Yefanov, O.; Oberthuer, D.; Murillo, G.E.P.; Roth, N.; Sarrou, I.; Villanueva-Perez, P.; et al. Ultracompact 3D microfluidics for time-resolved structural biology. Nat. Commun. 2020, 11, 657. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fang, W.F.; Hsu, M.H.; Chen, Y.T.; Yang, J.T. Characterization of microfluidic mixing and reaction in microchannels via analysis of cross-sectional patterns. Biomicrofluidics 2011, 5, 014111. [Google Scholar] [CrossRef] [Green Version]
- Inguva, V.; Rothstein, J.P.; Bilsel, O.; Perot, B.J. High-speed velocimetry in microfluidic protein mixers using confocal fluorescence decay microscopy. Exp. Fluids 2018, 59, 177. [Google Scholar] [CrossRef]
- Xi, C.; Marks, D.L.; Parikh, D.S.; Raskin, L.; Boppart, S.A. Structural and functional imaging of 3D microfluidic mixers using optical coherence tomography. Proc. Natl. Acad. Sci. USA 2004, 101, 7516. [Google Scholar] [CrossRef] [Green Version]
- Jiang, L.; Zeng, Y.; Zhou, H.; Qu, J.Y.; Yao, S. Visualizing millisecond chaotic mixing dynamics in microdroplets: A direct comparison of experiment and simulation. Biomicrofluidics 2012, 6, 012810. [Google Scholar] [CrossRef] [Green Version]
- Witkowski, D.; Kubicki, W.; Dziuban, J.A.; Jašíková, D.; Karczemska, A. Micro-Particle Image Velocimetry for imaging flows in passive microfluidic mixers. Metrol. Meas. Syst. 2018, 25, 441–450. [Google Scholar]
- Yang, J.-T.; Lai, Y.-H.; Fang, W.-F.; Hsu, M.-H. Simultaneous measurement of concentrations and velocities of submicron species using multicolor imaging and microparticle image velocimetry. Biomicrofluidics 2010, 4, 014109. [Google Scholar] [CrossRef] [Green Version]
- Huyke, D.A.; Ramachandran, A.; Oyarzun, D.I.; Kroll, T.; DePonte, D.P.; Santiago, J.G. On the competition between mixing rate and uniformity in a coaxial hydrodynamic focusing mixer. Anal. Chim. Acta 2020, 1103, 1–10. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fabrication Method | Pros | Cons |
|---|---|---|
| Co-axial capillary devices fabricated via glass extrusion [27,28] | High pressure and solution pH resistance and uses well-established fabrication methods. | Arduous manual intervention required during fabrication and assembly; poor reproducibility. |
| Co-axial capillary devices fabricated via ceramic micro-injection moulding [30] | Good reproducibility and reduced fabrication complexity compared to glass co-axial capillary devices. | Manual intervention required during fabrication, processing, and device assembly. |
| Microfluidic injector devices fabricated in PDMS [33,34,35,36] | Straight forward fabrication protocols, reproducible results, high spatial resolution. | Lack of mechanical stability and chemical inertness. Can only handle low pressures. |
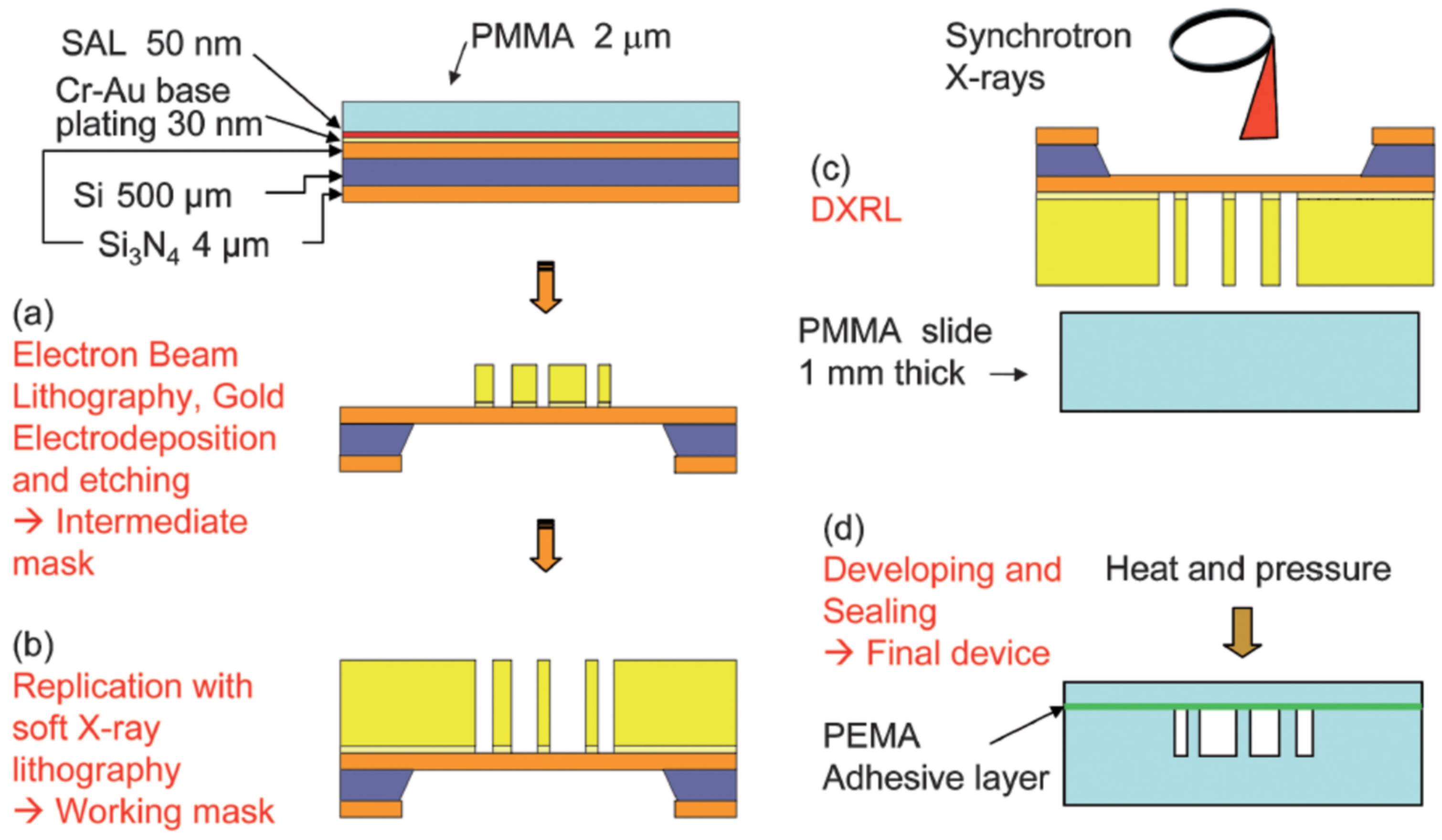
| Deep X-Ray Lithography (DXRL) in PMMA [37] | Reproducible fabrication and high resolution. | Requires access to a synchrotron beamline; low PH resistance due to using PMMA. |
| Microfluidic glass chip fabrication using hard lithography [38] | High spatial resolution and reproducibility. Chemically and mechanically robust. | Costly manufacturing processes involving a high degree of complexity. |
| Microfluidic SU8 on glass lithographic fabrication [39,40,41] | Simple fabrication achieving high resolution combined with chemical and mechanical inertness and design flexibility. | Requires additional micromachining to produce the device inlet and outlet. |
| Laser ablation of Kapton® polyimide fims [42] | High resolution, and high chemical and mechanical inertness. | Manual alignment required during fabrication employing laser micromachining. |
| Microfluidic devices fabricated via 3D nanoprinting [46,47,48,49,50,51] | Automated rapid-prototyping, high spatial resolution, and reproducibility possible. | Requires manual assembly and use of glass capillaries, limited flexibility in terms of geometry. |
| Method | Schematic | Comments |
|---|---|---|
| Complementary Metal-Oxide-Semiconductor (CMOS) high-speed video camera [21] |  | Used to measure the stability of the liquid jet and to study the behaviour of the liquid meniscus. |
| White-light interferometry [47] |  | Measures the absolute thickness and ‘flatness’ of the liquid sheet under both atmospheric pressure and vacuum conditions. |
| High-speed microscopic imaging [30,49] |  | Used to study the liquid jet stability and the break up of the jet into microdroplets. |
| Nanosecond double flash imaging [51] |  | Used to determine the jet velocity and jet diameter. |
| Method | Schematic | Comments |
|---|---|---|
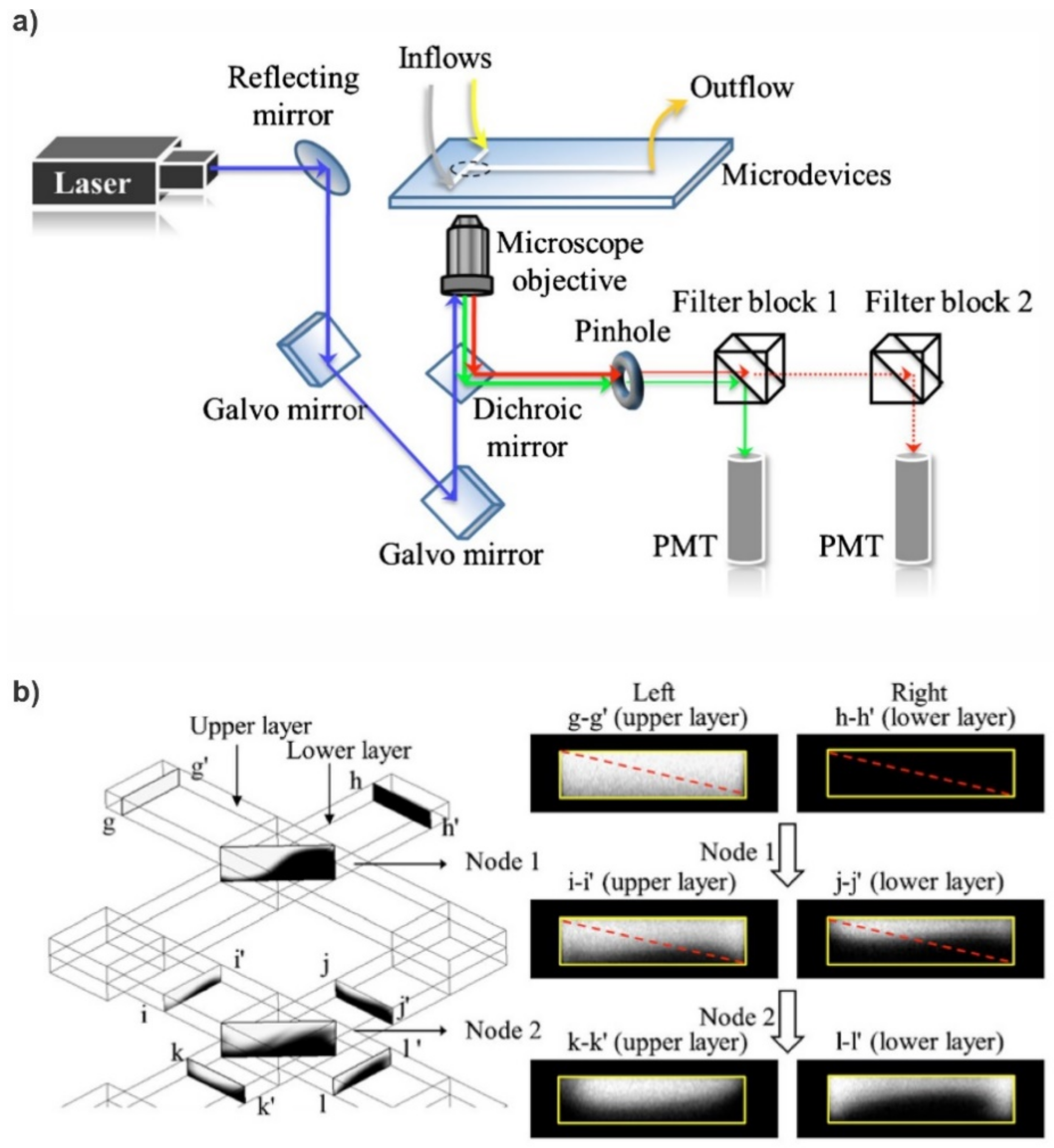
| Confocal Fluorescence Microscopy (CFM) [52] |  | CFM is able to image and quantify the 3D mixing patterns on the microfluidic device. |
| High-speed velocimetry [53] |  | Applied to the study of chaotic mixing via measurements of the fluid velocity. |
| Optical Coherence Tomography (OCT) [54] |  | Enables an estimation of the 3D mixing efficiency. |
| Micro Particle Image Velocimetry (PIV) [55,56,57] |  | Can be used to map the velocity profiles within passive micromixers. |
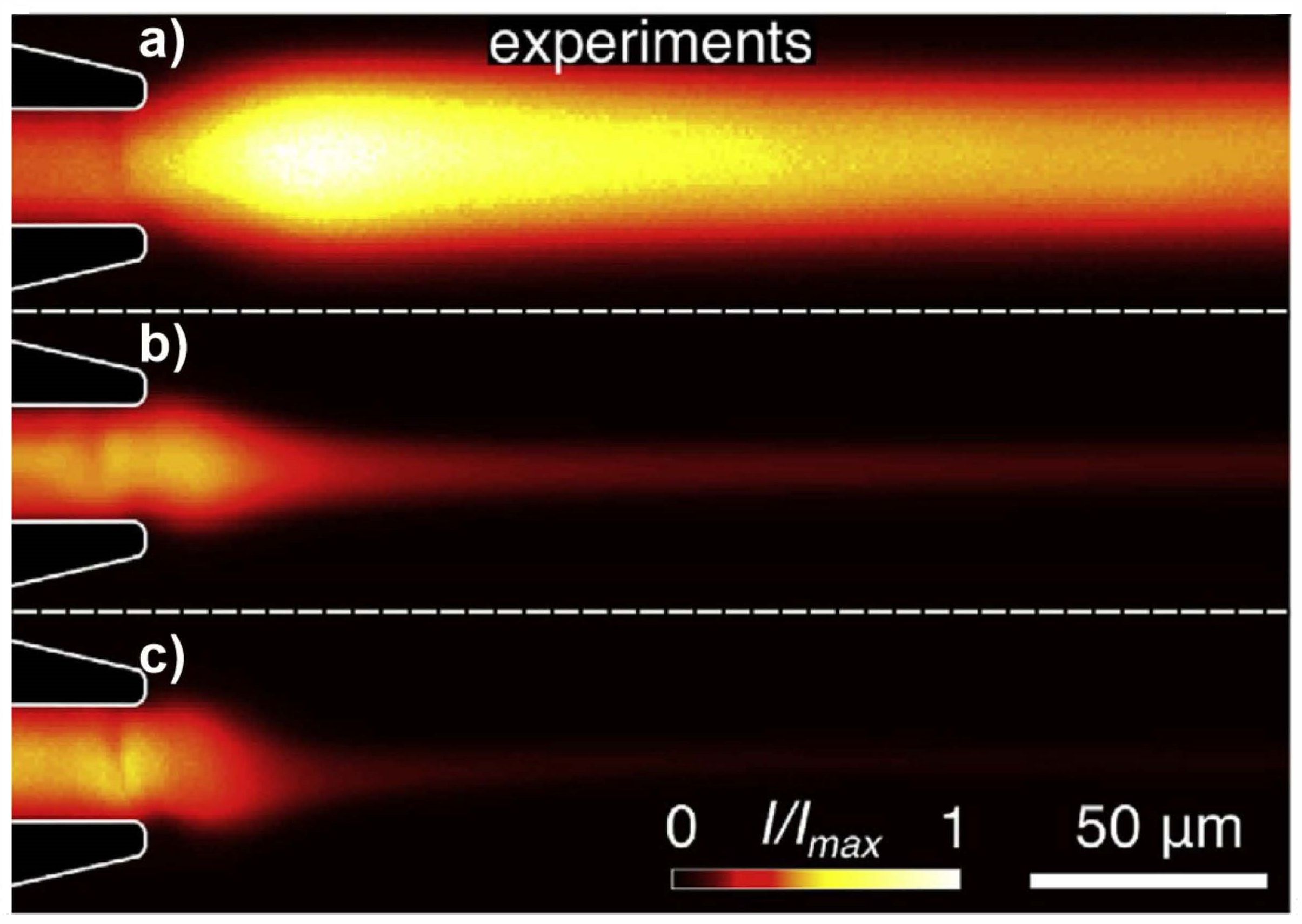
| Fluorescein–iodide quenching reaction [58] |  | Enables measurement of the mixing times and mixing efficiencies |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hejazian, M.; Balaur, E.; Abbey, B. Recent Advances and Future Perspectives on Microfluidic Mix-and-Jet Sample Delivery Devices. Micromachines 2021, 12, 531. https://doi.org/10.3390/mi12050531
Hejazian M, Balaur E, Abbey B. Recent Advances and Future Perspectives on Microfluidic Mix-and-Jet Sample Delivery Devices. Micromachines. 2021; 12(5):531. https://doi.org/10.3390/mi12050531
Chicago/Turabian StyleHejazian, Majid, Eugeniu Balaur, and Brian Abbey. 2021. "Recent Advances and Future Perspectives on Microfluidic Mix-and-Jet Sample Delivery Devices" Micromachines 12, no. 5: 531. https://doi.org/10.3390/mi12050531
APA StyleHejazian, M., Balaur, E., & Abbey, B. (2021). Recent Advances and Future Perspectives on Microfluidic Mix-and-Jet Sample Delivery Devices. Micromachines, 12(5), 531. https://doi.org/10.3390/mi12050531