
Design and Optimization Principles of Cylindrical Sliding Triboelectric Nanogenerators





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Anode Oxidization of Aluminum Film
2.2. Fabrication of CS-TENGs
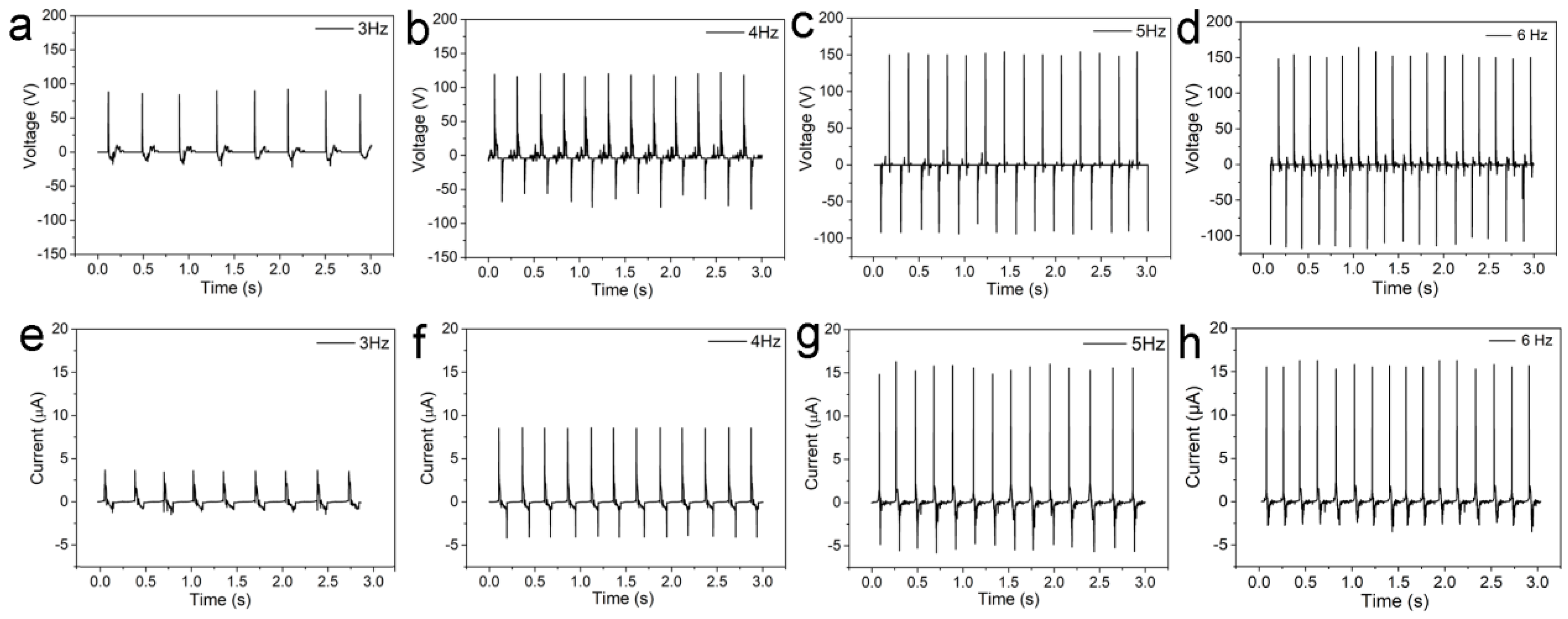
2.3. CS-TENG Performance Evaluation
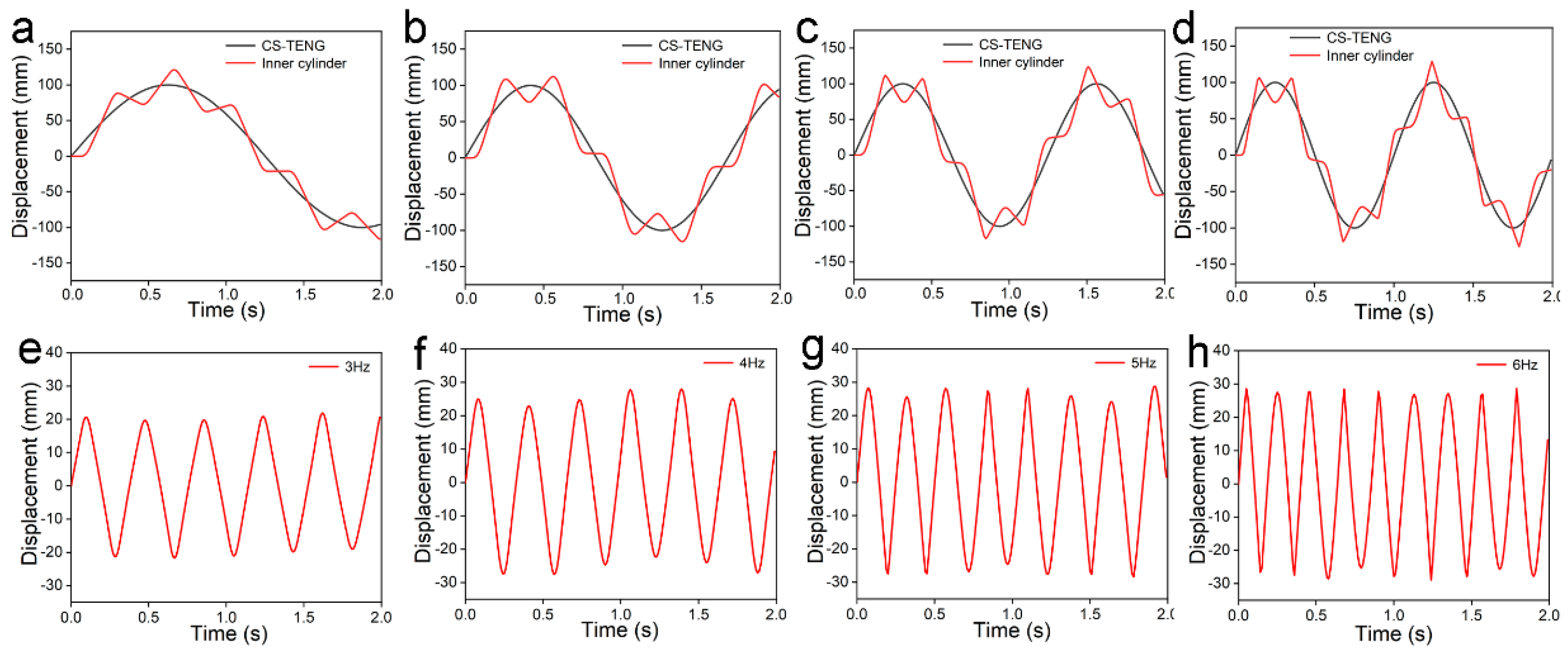
2.4. Finite Element Analysis Using ANSYS
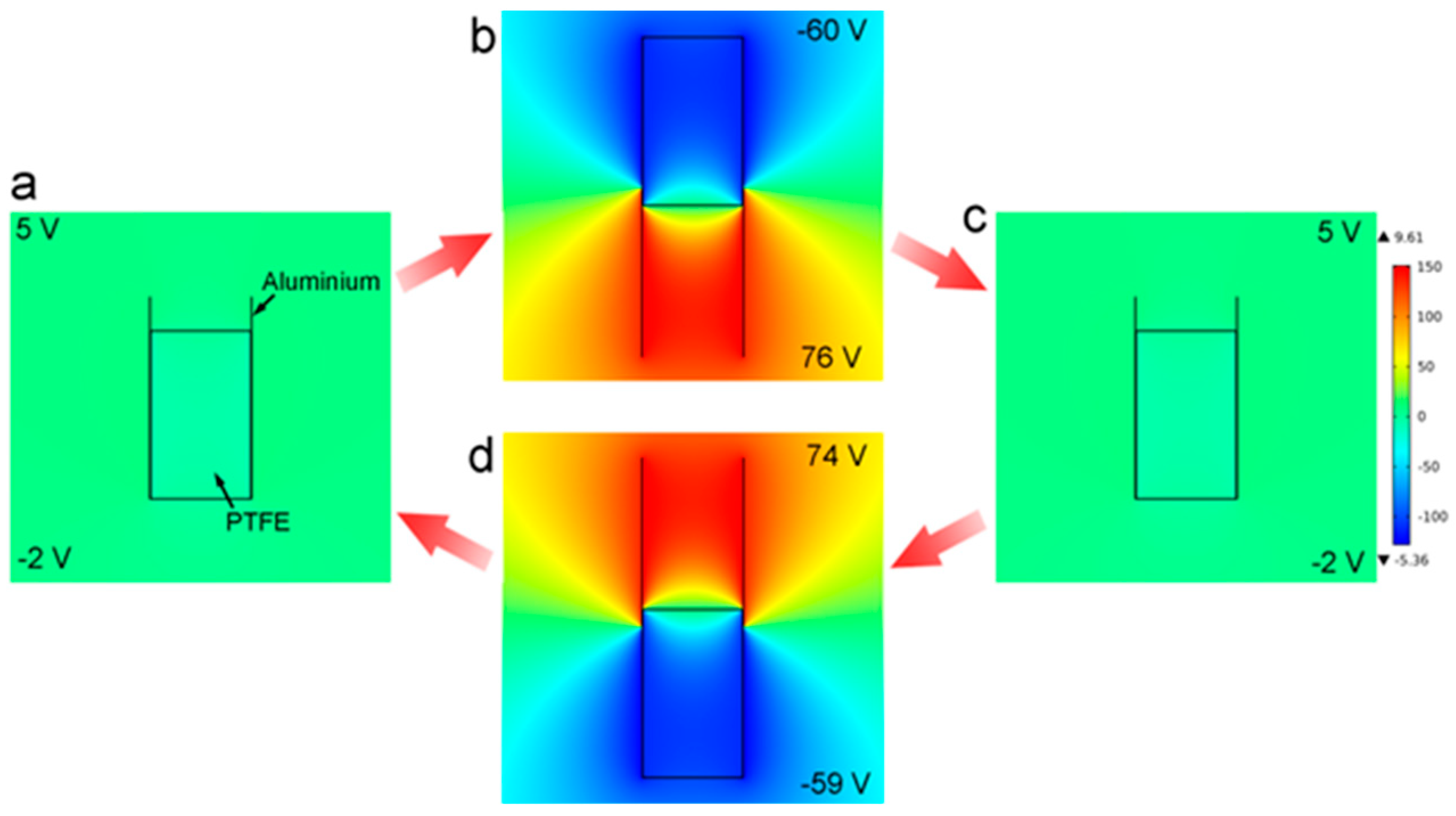
2.5. COMSOL Multiphysics Simulation
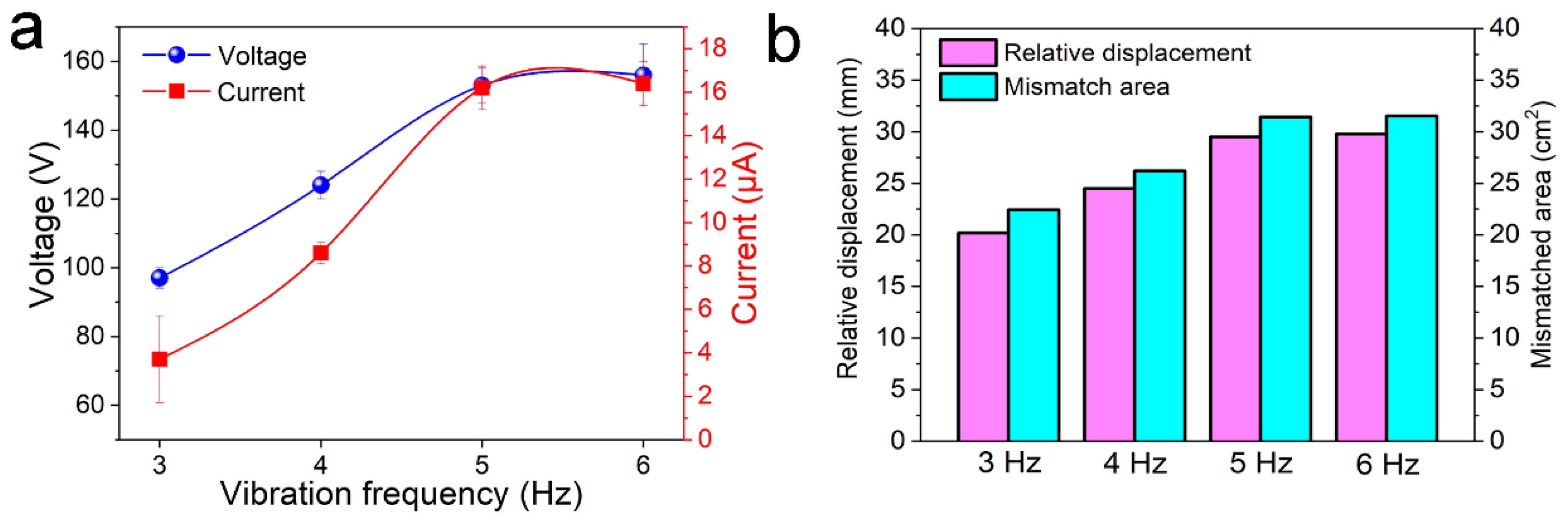
3. Results and Discussion
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dresselhaus, M.S.; Thomas, I.L. Alternative Energy Technologies. Nature 2001, 414, 332–337. [Google Scholar] [CrossRef]
- Wang, Z.L. Self-Powered Nanosensors and Nanosystems. Adv. Mater. 2012, 24, 280–285. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.L.; Chen, J.; Lin, L. Progress in Triboelectric Nanogenerators as a New Energy Technology and Self-powered Sensors. Energy Environ. Sci. 2015, 8, 2250–2282. [Google Scholar] [CrossRef]
- Liu, Z.; Nie, J.; Miao, B.; Li, J.; Cui, Y.; Wang, S.; Wang, Z.L.; Zhao, G.; Deng, Y.; Li, L.; et al. Self-Powered Intracellular Drug Delivery by a Biomechanical Energy-Driven Triboelectric Nanogenerator. Adv. Mater. 2019, 12, 1807795. [Google Scholar] [CrossRef] [PubMed]
- Wu, C.S.; Wang, A.C.; Ding, W.; Guo, H.Y.; Wang, Z.L. Triboelectric Nanogenerator: A Foundation of the Energy for the New Era. Adv. Energy Mater. 2019, 9, 1802906. [Google Scholar] [CrossRef]
- Wang, Z.L. On Maxwell’s Displacement Current for Energy and Sensors: The Origin of Nanogenerators. Mater. Today 2017, 20, 74–82. [Google Scholar] [CrossRef]
- Fan, F.R.; Tang, W.; Wang, Z.L. Flexible Nanogenerators for Energy Harvesting and Self-powered Electronics. Adv. Mater. 2016, 28, 4283–4305. [Google Scholar] [CrossRef]
- Hu, Y.F.; Xu, C.; Zhang, Y.; Lin, L.; Snyder, R.L.; Wang, Z.L. A Nanogenerator for Energy Harvesting from a Rotating Tire and its Application as a Self-Powered Pressure/Speed Sensor. Adv. Mater. 2011, 23, 4068–4071. [Google Scholar] [CrossRef]
- Lee, M.; Chen, C.Y.; Wang, S.; Cha, S.N.; Park, Y.J.; Kim, J.M.; Chou, L.J.; Wang, Z.L. A Hybrid Piezoelectric Structure for Wearable Nanogenerators. Adv. Mater. 2012, 24, 1759–1764. [Google Scholar] [CrossRef]
- Lee, M.; Bae, J.; Lee, J.; Lee, C.S.; Hong, S.; Wang, Z.L. Self-Powered Environmental Sensor System Driven by Nanogenerators. Energy Environ. Sci. 2011, 4, 3359–3363. [Google Scholar] [CrossRef]
- Han, Q.; Chen, Y.; Song, W.; Zhang, M.; Wang, S.; Ren, P.; Hao, L.; Wang, A.; Bai, S.; Yin, J. Fabrication of Agarose Hydrogel with Patterned Silver Nanowires for Motion Sensor. Bio Des. Manuf. 2019, 2, 269–277. [Google Scholar] [CrossRef]
- Hamidi, A.; Almubarak, Y.; Tadesse, Y. Multidirectional 3D-printed Functionally Graded Modular Joint Actuated by TCPFL Muscles for Soft Robots. Bio Des. Manuf. 2019, 2, 256–268. [Google Scholar] [CrossRef]
- Xu, S.; Qin, Y.; Xu, C.; Wei, Y.G.; Yang, R.S.; Wang, Z.L. Self-Powered Nanowire Devices. Nat. Nano Technol. 2010, 5, 366–373. [Google Scholar] [CrossRef]
- Yang, R.S.; Qin, Y.; Dai, L.M.; Wang, Z.L. Power Generation with Laterally Packaged Piezoelectric Fine Wires. Nat. Nano Technol. 2009, 4, 34–39. [Google Scholar] [CrossRef]
- Zhang, C.; Zhu, P.; Lin, Y.; Tang, W.; Jiao, Z.; Yang, H.; Zou, J. Fluid-driven Artificial Muscles: Bio-design, Manufacturing, Sensing, Control, and Applications. Bio Des. Manuf. 2021, 4, 123–145. [Google Scholar] [CrossRef]
- Pelrine, R.; Kornbluh, R.; Eckerle, J.; Jeuck, P.; Oh, S.J.; Pei, Q.B.; Stanford, S. Dielectric Elastomers: Generator Mode Fundamentals and Applications. Proc. Soc. Photo Opt. 2001, 4329, 148–156. [Google Scholar]
- Yang, J.; Yang, F.; Zhao, L.; Shang, W.; Qin, H.; Wang, S.; Jiang, X.; Cheng, G.; Du, Z. Managing and Optimizing the Output Performances of a Triboelectric Nanogenerator by a Self-powered Electrostatic Vibrator Switch. Nano Energy 2018, 46, 220–228. [Google Scholar] [CrossRef]
- Gu, G.Q.; Han, C.B.; Tian, J.J.; Lu, C.X.; He, C.; Jiang, T.; Li, Z.; Wang, Z.L. Antibacterial Composite Film-based Triboelectric Nanogenerator for Harvesting Walking Energy. ACS Appl. Mater. Inter. 2017, 9, 11882–11888. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R.; Lin, L.; Jing, Q.S.; Wu, W.Z.; Zhang, Y.; Jiao, Z.X.; Yan, L.; Han, R.P.S.; Wang, Z.L. Nanogenerator as an Active Sensor for Vortex Capture and Ambient Wind-Velocity Detection. Energy Environ. Sci. 2012, 5, 8528–8533. [Google Scholar] [CrossRef]
- Wang, Z.L. New Wave Power. Nature 2017, 542, 159–160. [Google Scholar] [CrossRef]
- Zhao, K.; Gu, G.; Zhang, Y.; Zhang, B.; Yang, F.; Zhao, L.; Zheng, M.; Cheng, G.; Du, Z. The Self-powered CO2 Gas Sensor Based on Gas Discharge Induced by Triboelectric Nanogenerator. Nano Energy 2018, 53, 898–905. [Google Scholar] [CrossRef]
- Wang, J.; Li, S.; Yi, F.; Zi, Y.; Lin, J.; Wang, X.; Xu, Y.; Wang, Z.L. Sustainably Powering Wearable Electronics Solely by Biomechanical Energy. Nat. Commun. 2016, 7, 12744. [Google Scholar] [CrossRef] [Green Version]
- Williams, C.B.; Shearwood, C.; Harradine, M.A.; Mellor, P.H.; Birch, T.S.; Yates, R.B. Development of an Electromagnetic Micro-generator. IEE Proc. Part G Circuits Devices Syst. 2001, 148, 337–342. [Google Scholar] [CrossRef]
- Wen, Z.; Yang, Y.; Sun, N.; Li, G.; Liu, Y.; Chen, C.; Sun, X.; Shi, J.; Xie, L.; Jiang, H.; et al. A Wrinkled PEDOT:PSS Film Based Stretchable and Transparent Triboelectric Nanogenerator for Wearable Energy Harvesters and Active Motion Sensors. Adv. Funct. Mater. 2018, 28, 8. [Google Scholar] [CrossRef]
- Chen, J.; Zhu, G.; Yang, W.Q.; Jing, Q.S.; Bai, P.; Yang, Y.; Hou, T.C.; Wang, Z.L. Harmonic-Resonator-Based Triboelectric Nanogenerator as a Sustainable Power Source and a Self-Powered Active Vibration Sensor. Adv. Mater. 2013, 25, 6094–6099. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Tang, W.; Han, C.; Fan, F.; Wang, Z.L. Theoretical Comparison, Equivalent Transformation, and Conjunction Operations of Electromagnetic Induction Generator and Triboelectric Nanogenerator for Harvesting Mechanical Energy. Adv. Mater. 2014, 26, 3580. [Google Scholar] [CrossRef]
- Fan, F.R.; Lin, L.; Zhu, G.; Wu, W.Z.; Zhang, R.; Wang, Z.L. Transparent Triboelectric Nanogenerators and Self-Powered Pressure Sensors Based on Micropatterned Plastic Films. Nano Lett. 2012, 12, 3109–3114. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.H.; Lin, L.; Wang, Z.L. Nanoscale Triboelectric Effect-Enabled Energy Conversion for Sustainably Powering Portable Electronics. Nano Lett. 2012, 12, 6339–6346. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Lin, L.; Zhang, Y.; Jing, Q.S.; Hou, T.C.; Wang, Z.L. Self-Powered Magnetic Sensor Based on a Triboelectric Nanogenerator. ACS Nano 2012, 6, 10378–10383. [Google Scholar] [CrossRef]
- Wang, Z.L. Triboelectric Nanogenerators as New Energy Technology for Self-Powered Systems and as Active Mechanical and Chemical Sensors. ACS Nano 2013, 7, 9533–9557. [Google Scholar] [CrossRef]
- Challa, V.R.; Prasad, M.G.; Shi, Y.; Fisher, F.T. A Vibration Energy Harvesting Device with Bidirectional Resonance Frequency Tunability. Smart Mater. Struct. 2008, 17, 015035. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, H.; Lin, Z.H.; Zhou, Y.S.; Jing, Q.; Su, Y.; Yang, J.; Chen, J.; Hu, C.; Wang, Z.L. Human Skin Based Triboelectric Nanogenerators for Harvesting Biomechanical Energy and as Self-powered Active Tactile Sensor System. ACS Nano 2013, 7, 9213–9222. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Beeby, S.P.; Torah, R.N.; Tudor, M.J.; Glynne-Jones, P.; O’Donnell, T.; Saha, C.R.; Roy, S. A Micro Electromagnetic Generator for Vibration Energy Harvesting. J. Micromech. Microeng. 2007, 17, 1257–1265. [Google Scholar] [CrossRef]
- Hu, Y.F.; Yang, J.; Jing, Q.S.; Niu, S.M.; Wu, W.Z.; Wang, Z.L. Triboelectric Nanogenerator Built on Suspended 3D Spiral Structure as Vibration and Positioning Sensor and Wave Energy Harvester. ACS Nano 2013, 7, 10424–10432. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Wang, Z.; Wang, G.; Liu, G.; Chen, J.; Pu, X.; Xi, Y.; Wang, X.; Guo, H.; Hu, C.; et al. Integrated Charge Excitation Triboelectric Nanogenerator. Nat Commun 2019, 10, 1426. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, S.H.; Lin, L.; Xie, Y.N.; Jing, Q.S.; Niu, S.M.; Wang, Z.L. Sliding-Triboelectric Nanogenerators Based on In-Plane Charge-Separation Mechanism. Nano Lett. 2013, 13, 2226–2233. [Google Scholar] [CrossRef] [Green Version]
- Zhang, B.; Chen, J.; Jin, L.; Deng, W.; Zhang, L.; Zhang, H.; Zhu, M.; Yang, W.; Wang, Z.L. Rotating-disk-based Hybridized Electromagnetic-triboelectric Nanogenerator for Sustainably Powering Wireless Traffic Volume Sensors. ACS Nano 2016, 10, 6241–6247. [Google Scholar] [CrossRef]
- Zhu, G.; Chen, J.; Liu, Y.; Bai, P.; Zhou, Y.S.; Jing, Q.S.; Pan, C.F.; Wang, Z.L. Linear-Grating Triboelectric Generator Based on Sliding Electrification. Nano Lett. 2013, 13, 2282–2289. [Google Scholar] [CrossRef]
- Dharmasena, R.; Silva, S. Towards optimized triboelectric nanogenerators. Nano Energy 2019, 62, 530−549. [Google Scholar] [CrossRef]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, Z.; Feng, P.-Y.; Jing, X.; Li, H.; Mi, H.-Y.; Liu, Y. Design and Optimization Principles of Cylindrical Sliding Triboelectric Nanogenerators. Micromachines 2021, 12, 567. https://doi.org/10.3390/mi12050567
Xia Z, Feng P-Y, Jing X, Li H, Mi H-Y, Liu Y. Design and Optimization Principles of Cylindrical Sliding Triboelectric Nanogenerators. Micromachines. 2021; 12(5):567. https://doi.org/10.3390/mi12050567
Chicago/Turabian StyleXia, Zhike, Pei-Yong Feng, Xin Jing, Heng Li, Hao-Yang Mi, and Yuejun Liu. 2021. "Design and Optimization Principles of Cylindrical Sliding Triboelectric Nanogenerators" Micromachines 12, no. 5: 567. https://doi.org/10.3390/mi12050567
APA StyleXia, Z., Feng, P.-Y., Jing, X., Li, H., Mi, H.-Y., & Liu, Y. (2021). Design and Optimization Principles of Cylindrical Sliding Triboelectric Nanogenerators. Micromachines, 12(5), 567. https://doi.org/10.3390/mi12050567