
Readout Circuits for Capacitive Sensors

Abstract
:1. Introduction
2. Capacitive Sensor and Readout System
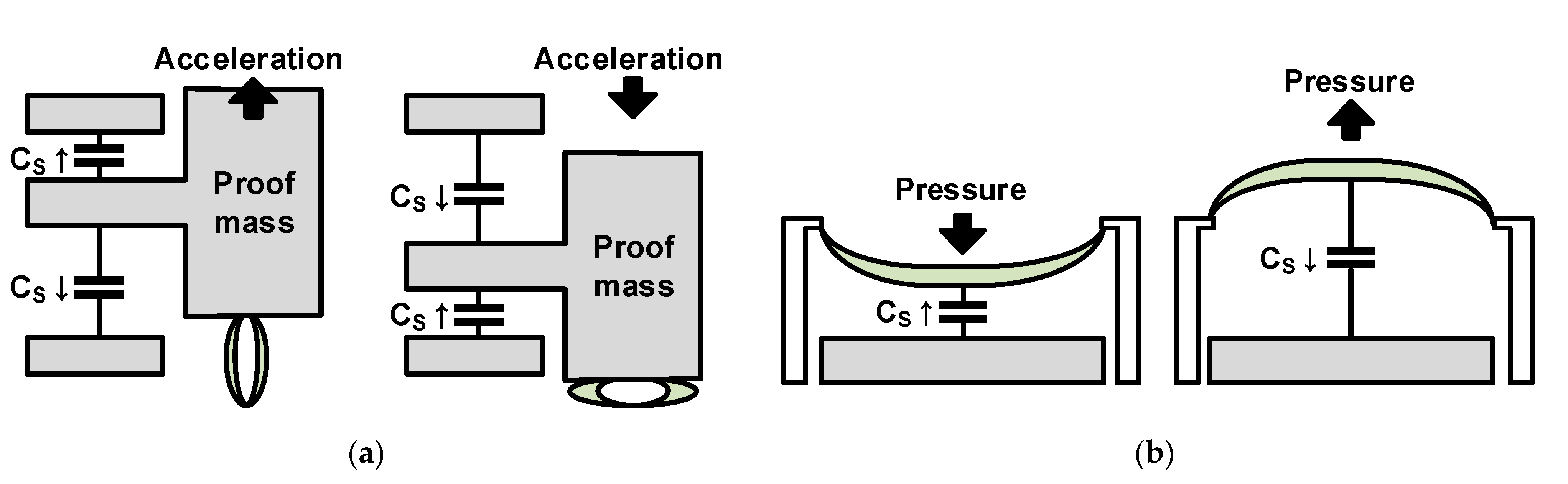
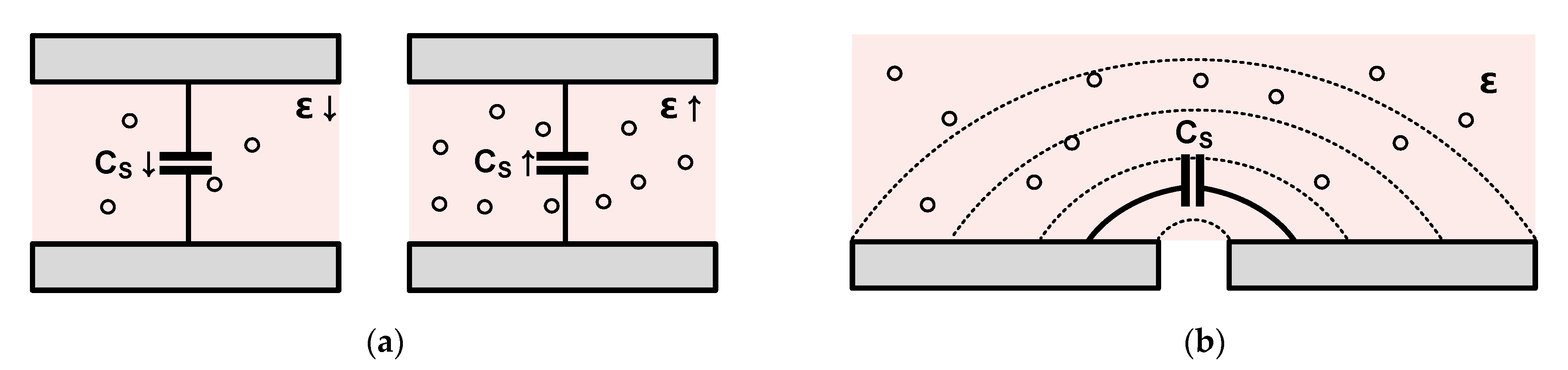
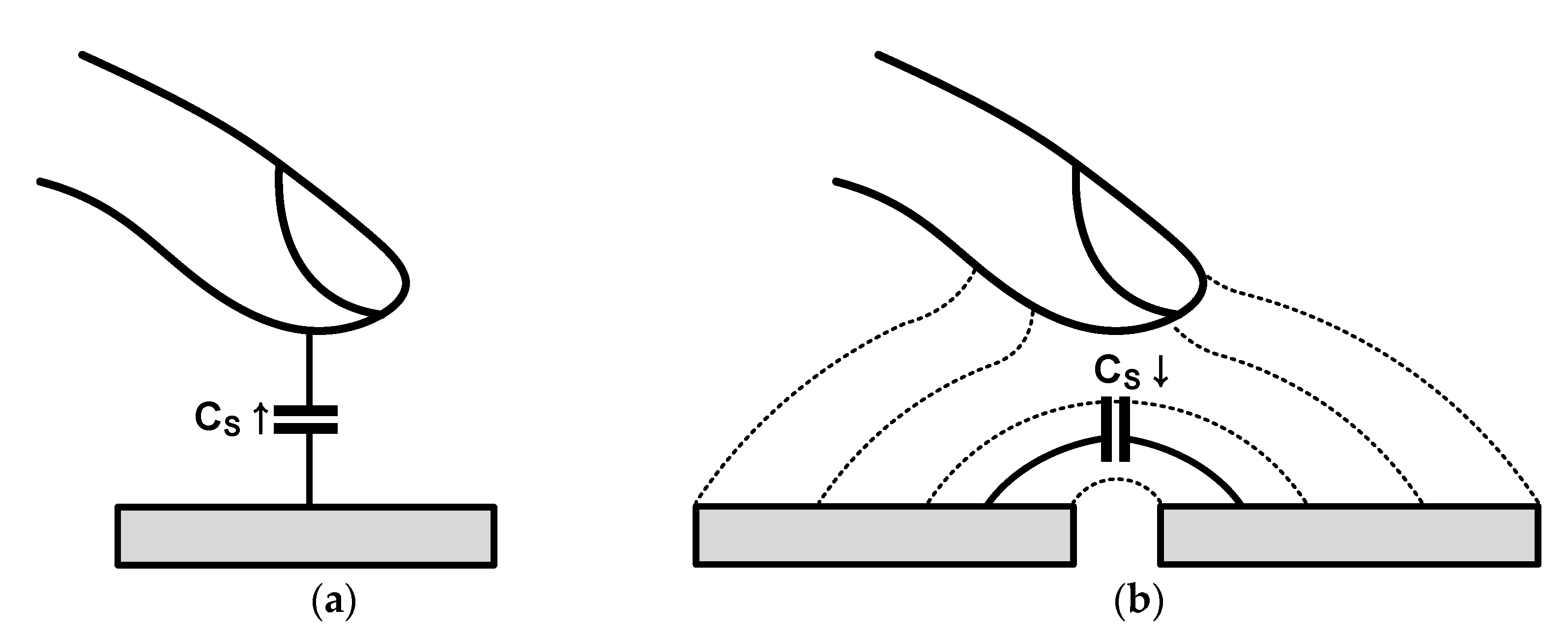
2.1. Capacitive Sensor
2.2. Analog Front-End Circuit
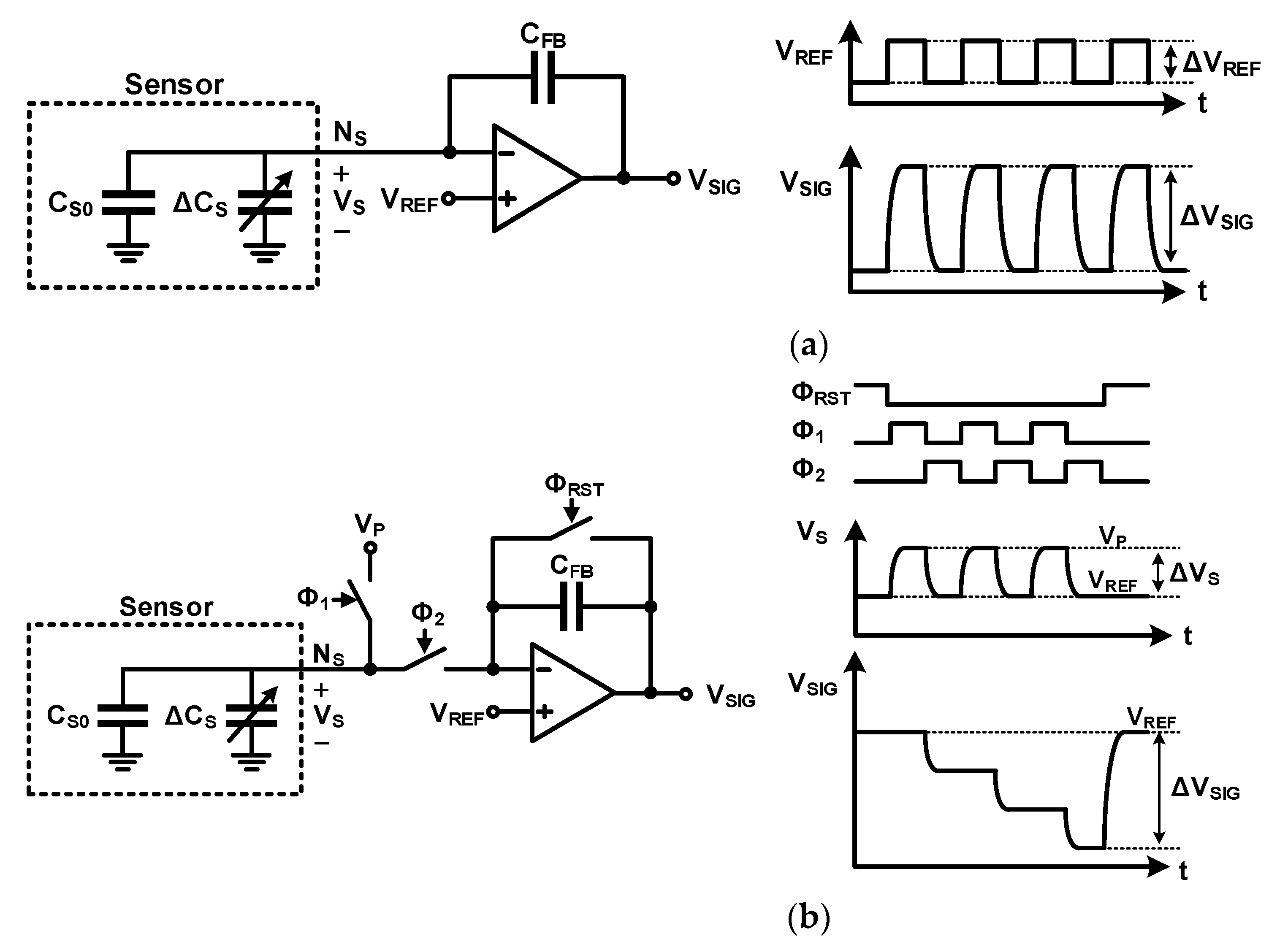
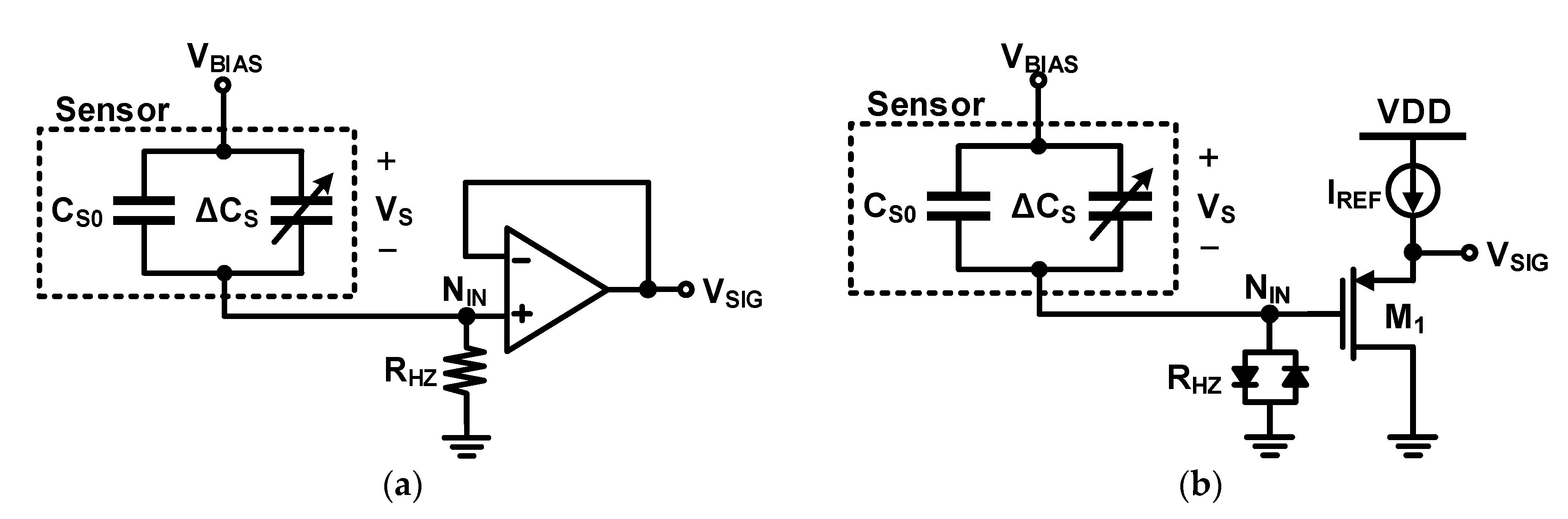
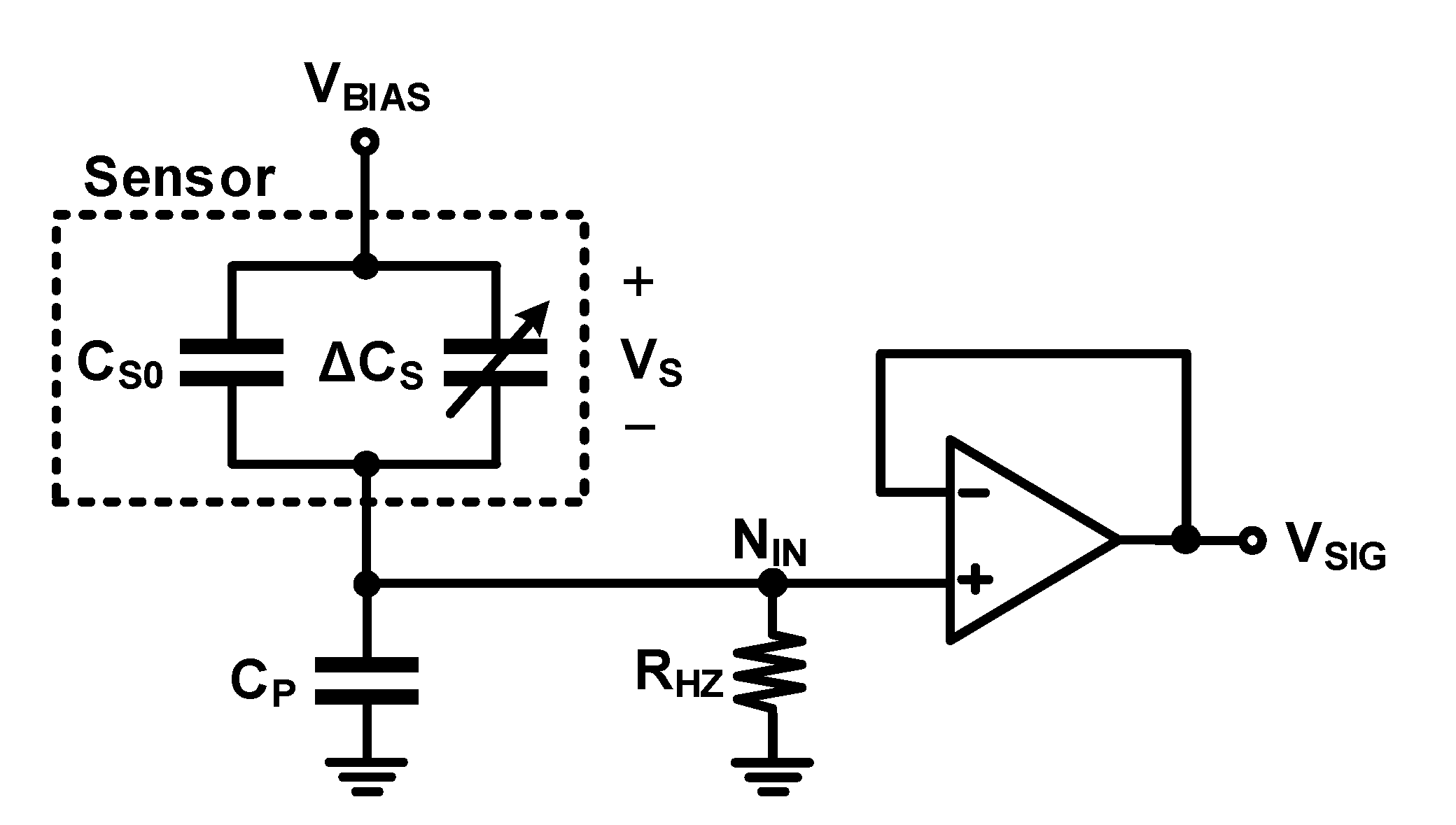
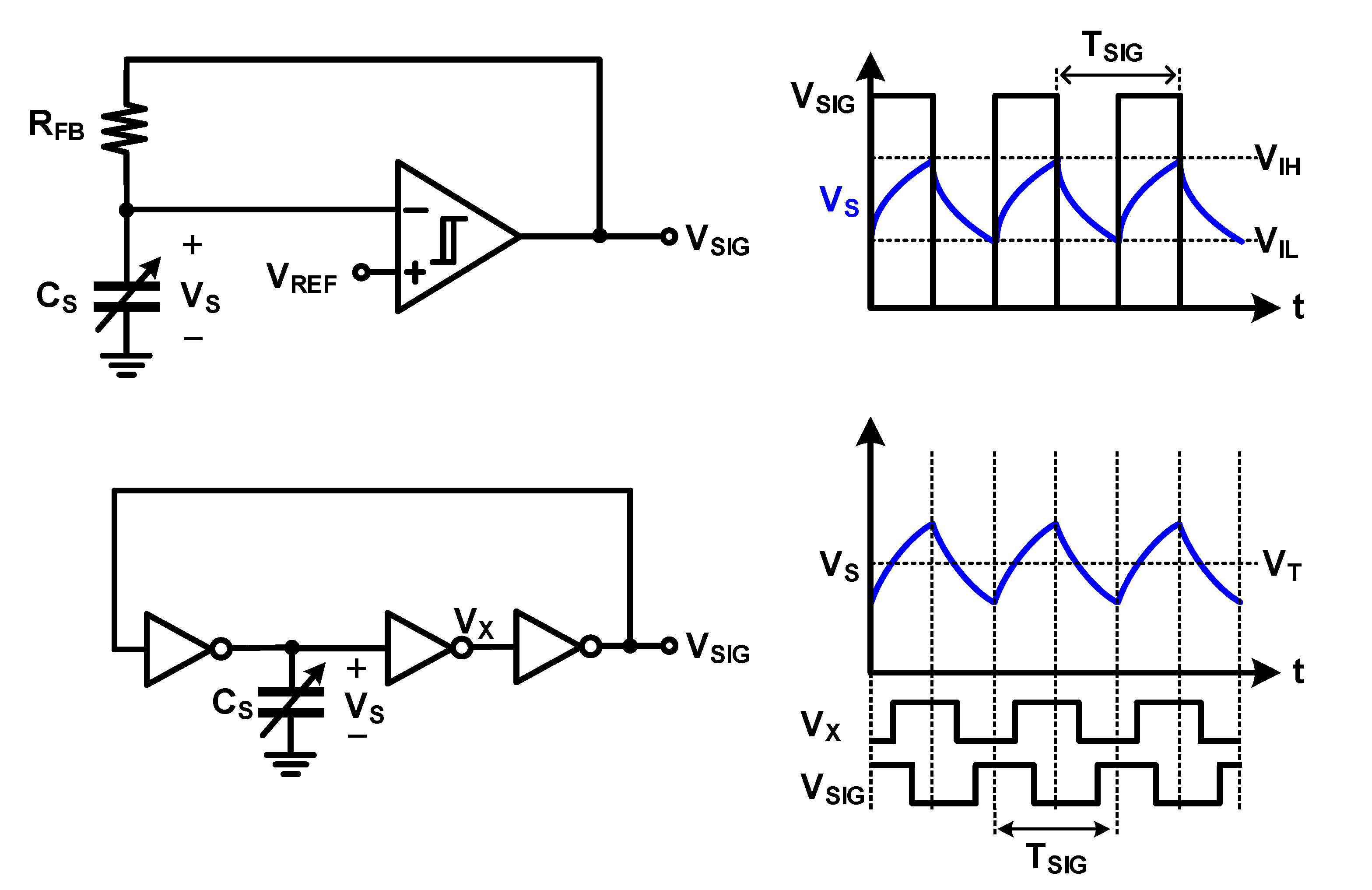
2.2.1. Self-Capacitance Readout Circuit
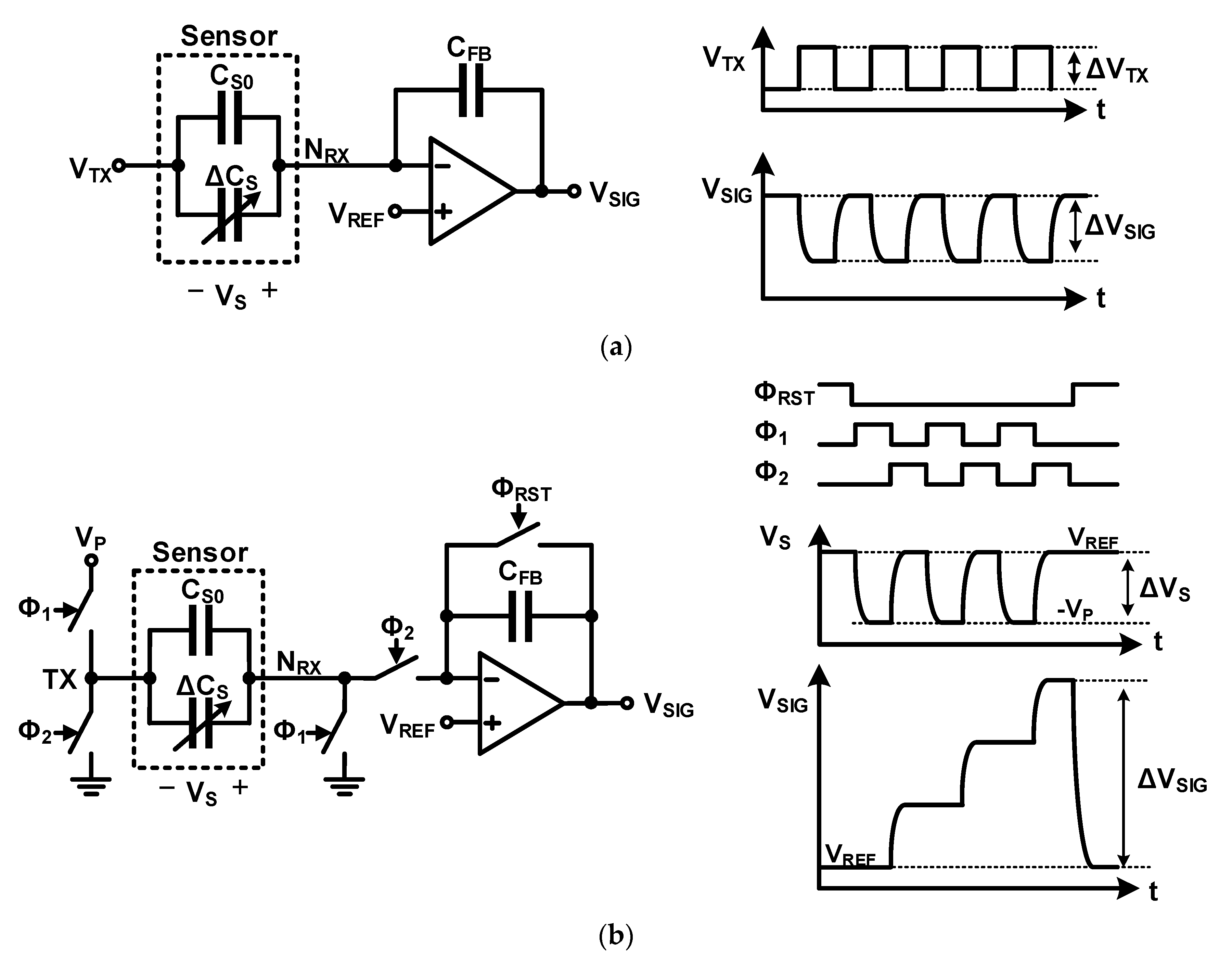
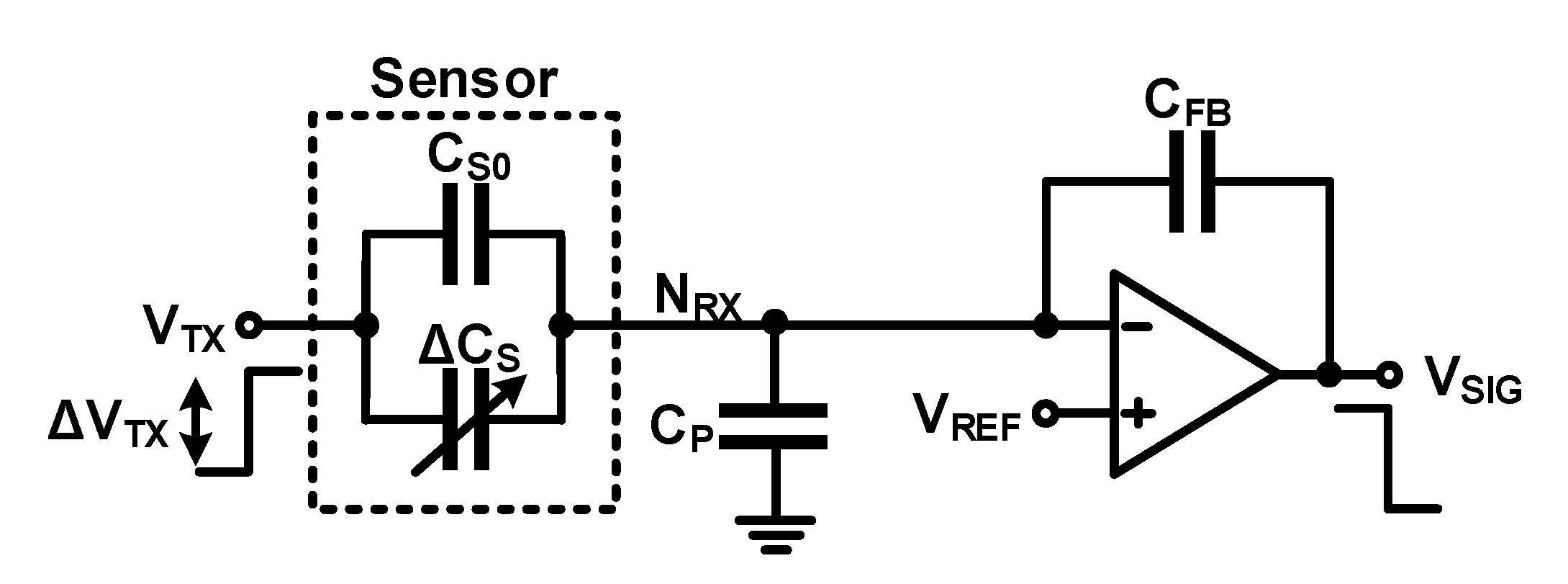
2.2.2. Mutual-Capacitance Readout Circuit
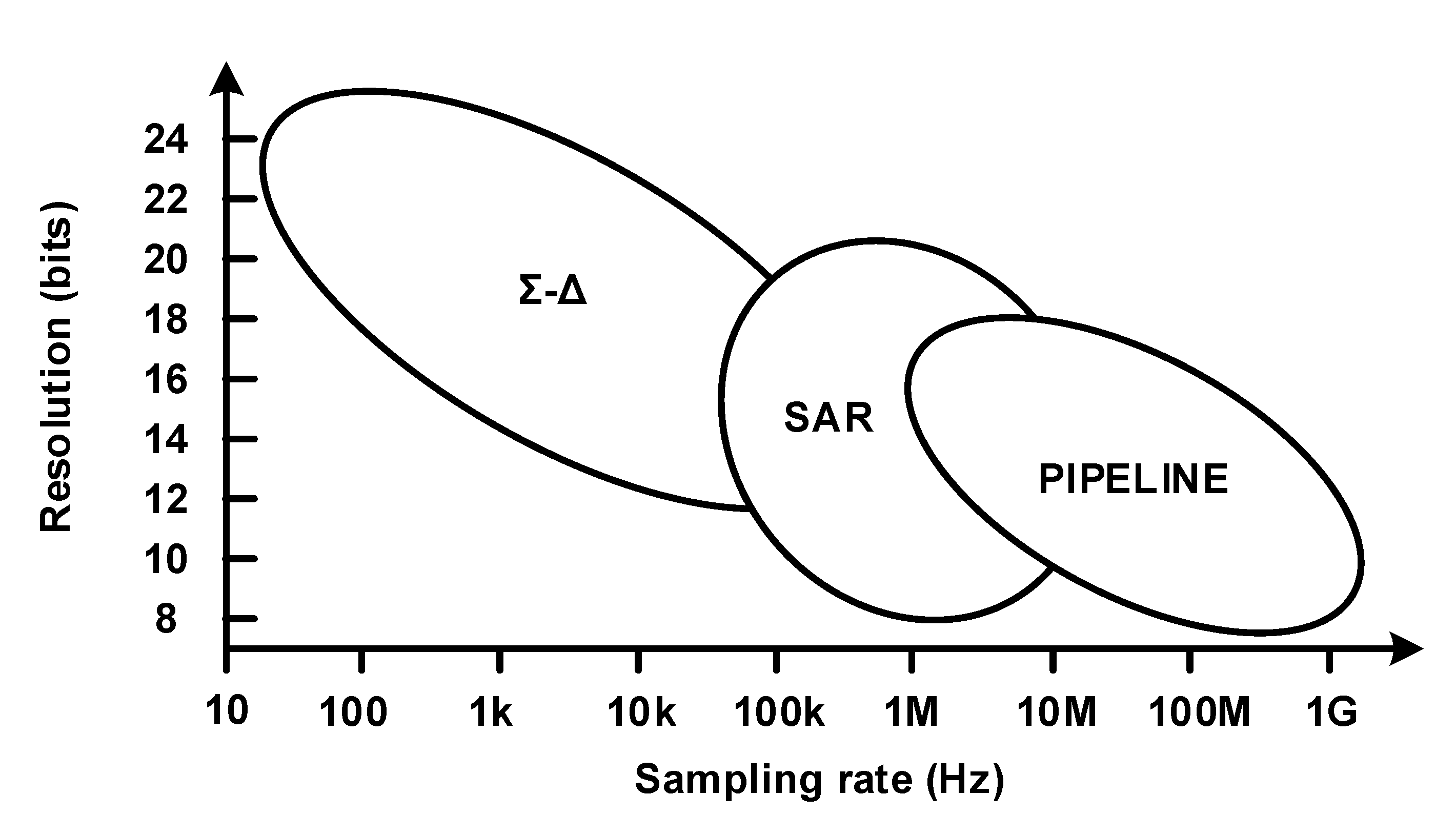
2.3. Analog-to-Digital Converters (ADC)
2.4. Post-Processing
3. Technical Issues of the Capacitive Sensor Readout System
3.1. Signal-to-Noise Ratio (SNR): Signal Power
3.1.1. Mutual-Capacitance Sensing
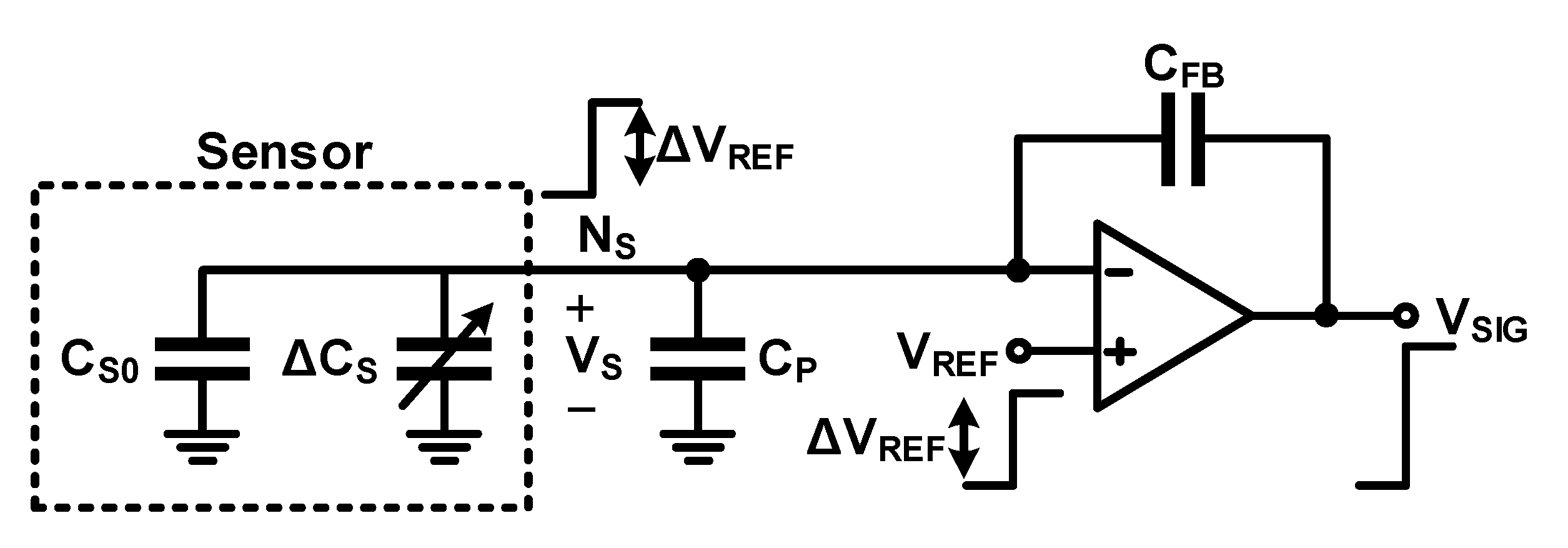
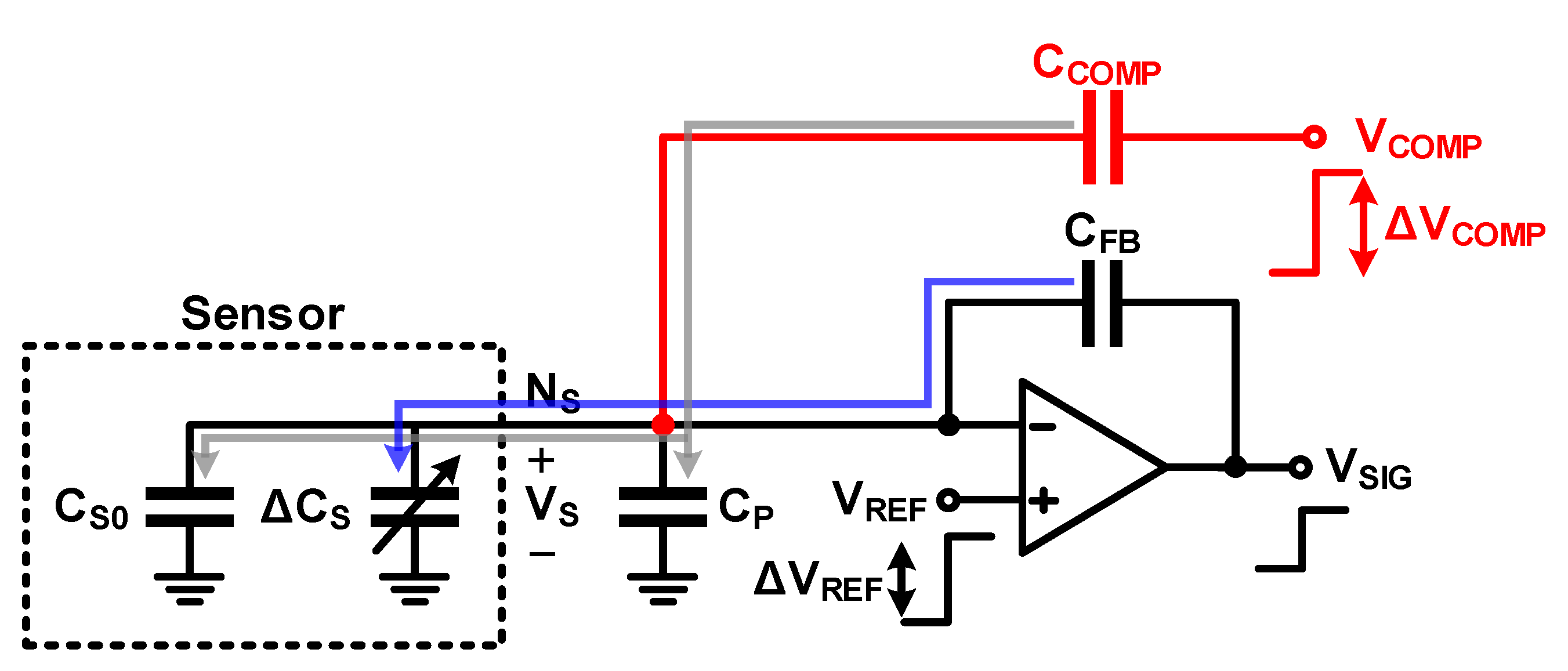
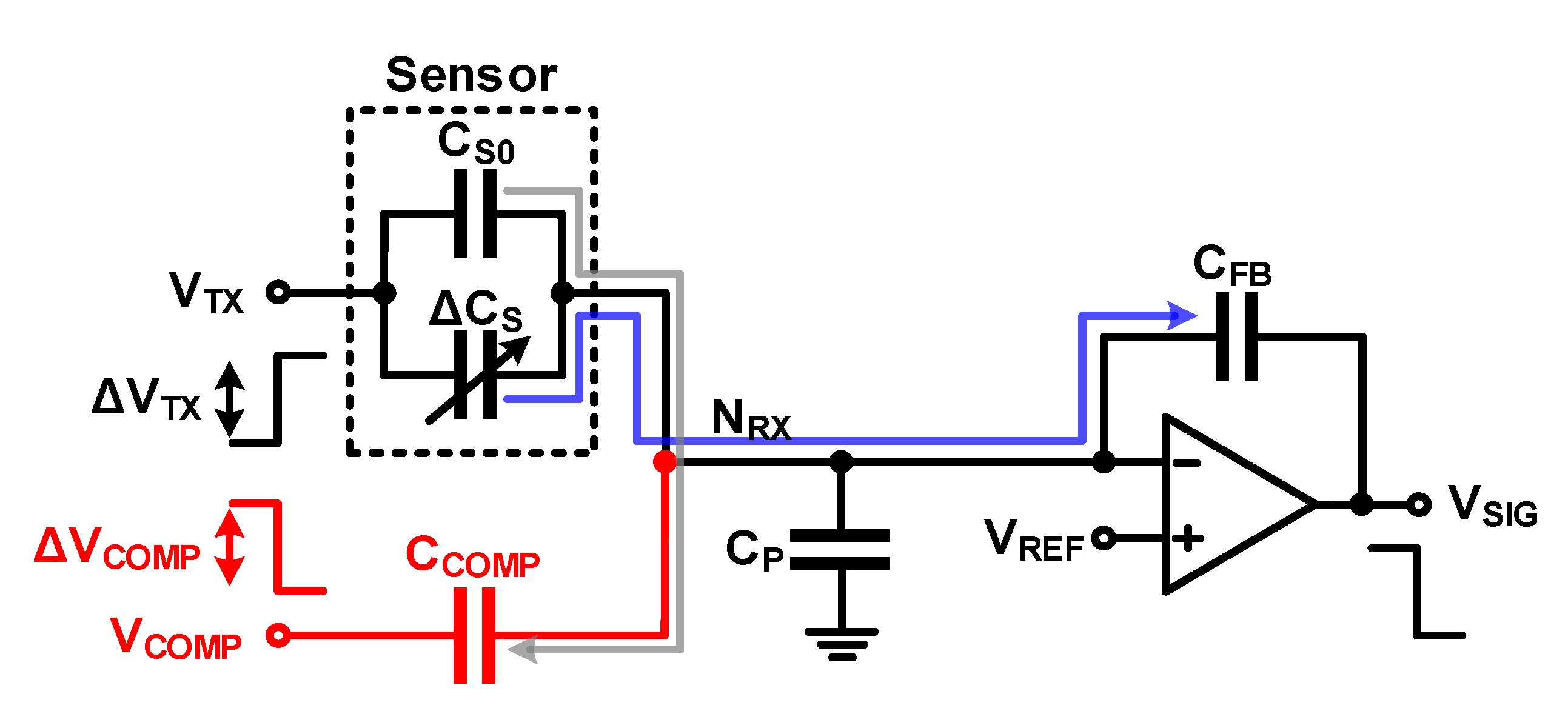
3.1.2. Charge-Balancing Compensation: Using a Compensation Capacitor
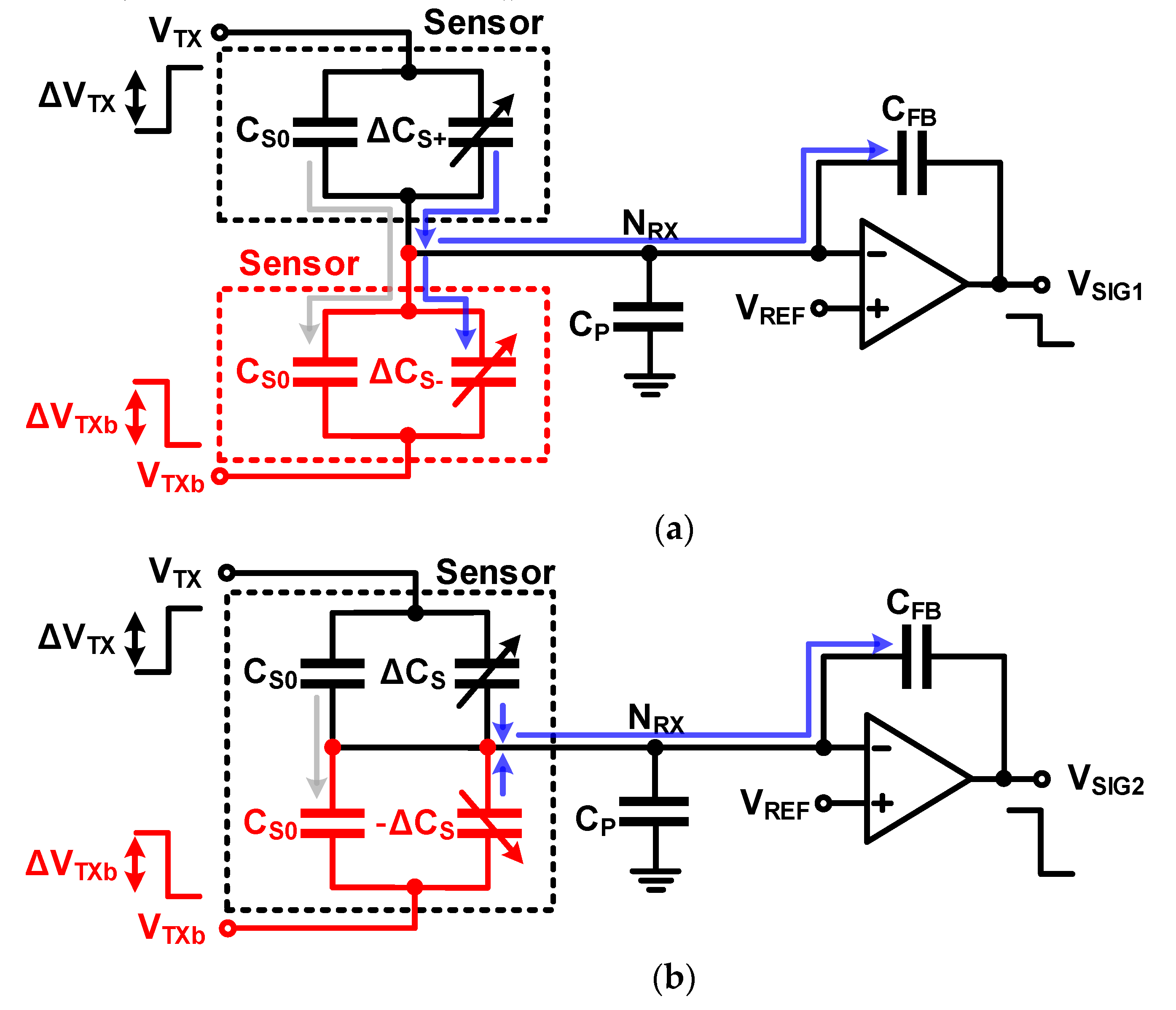
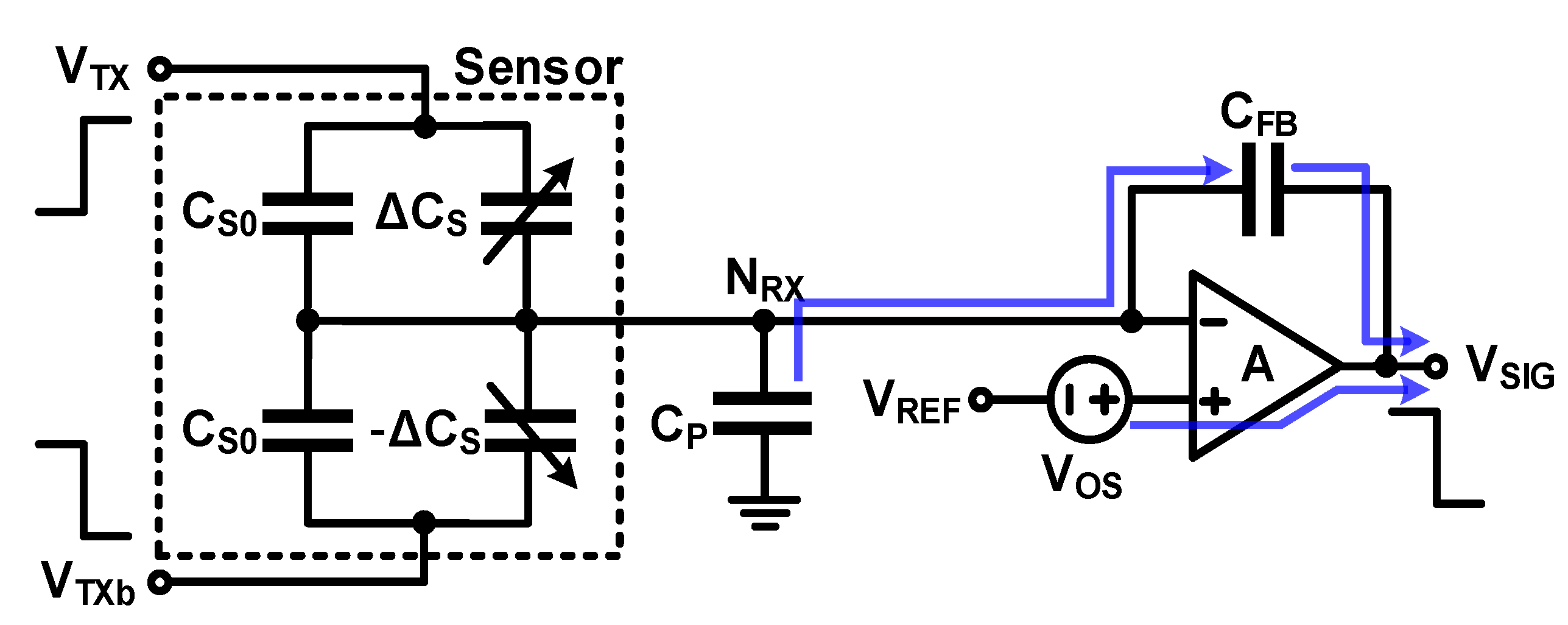
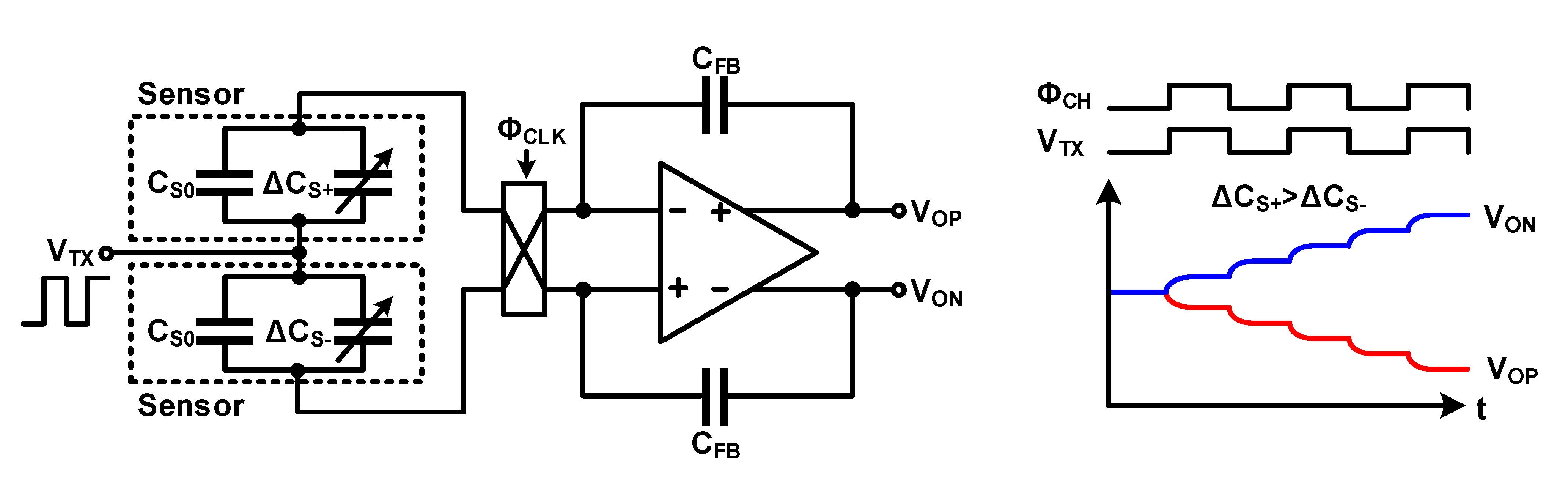
3.1.3. Charge-Balancing Compensation: Using a Differential Sensor
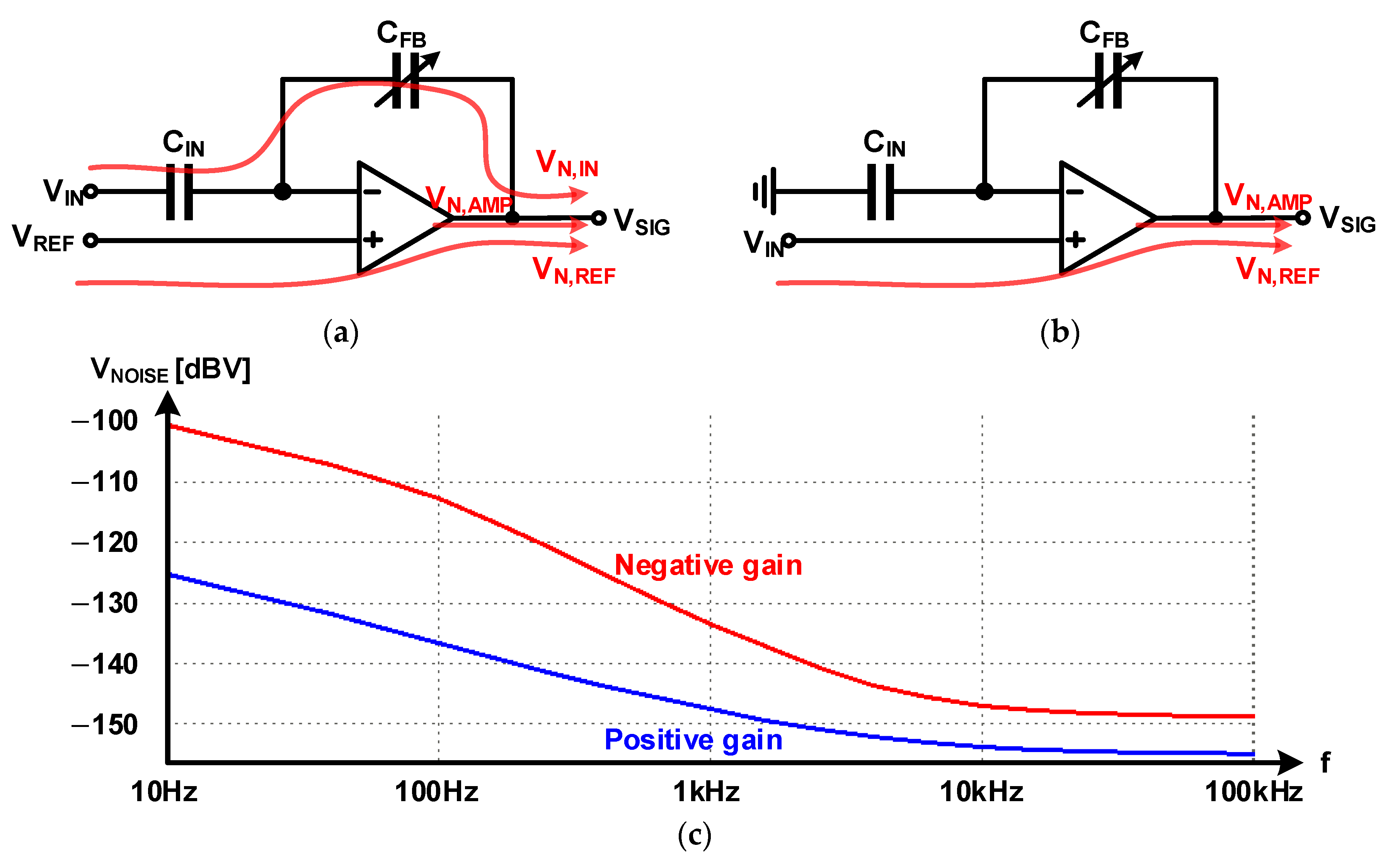
3.2. Signal-to-Noise Ratio (SNR): Internal Noise
3.3. Signal-to-Noise Ratio (SNR): External Noise
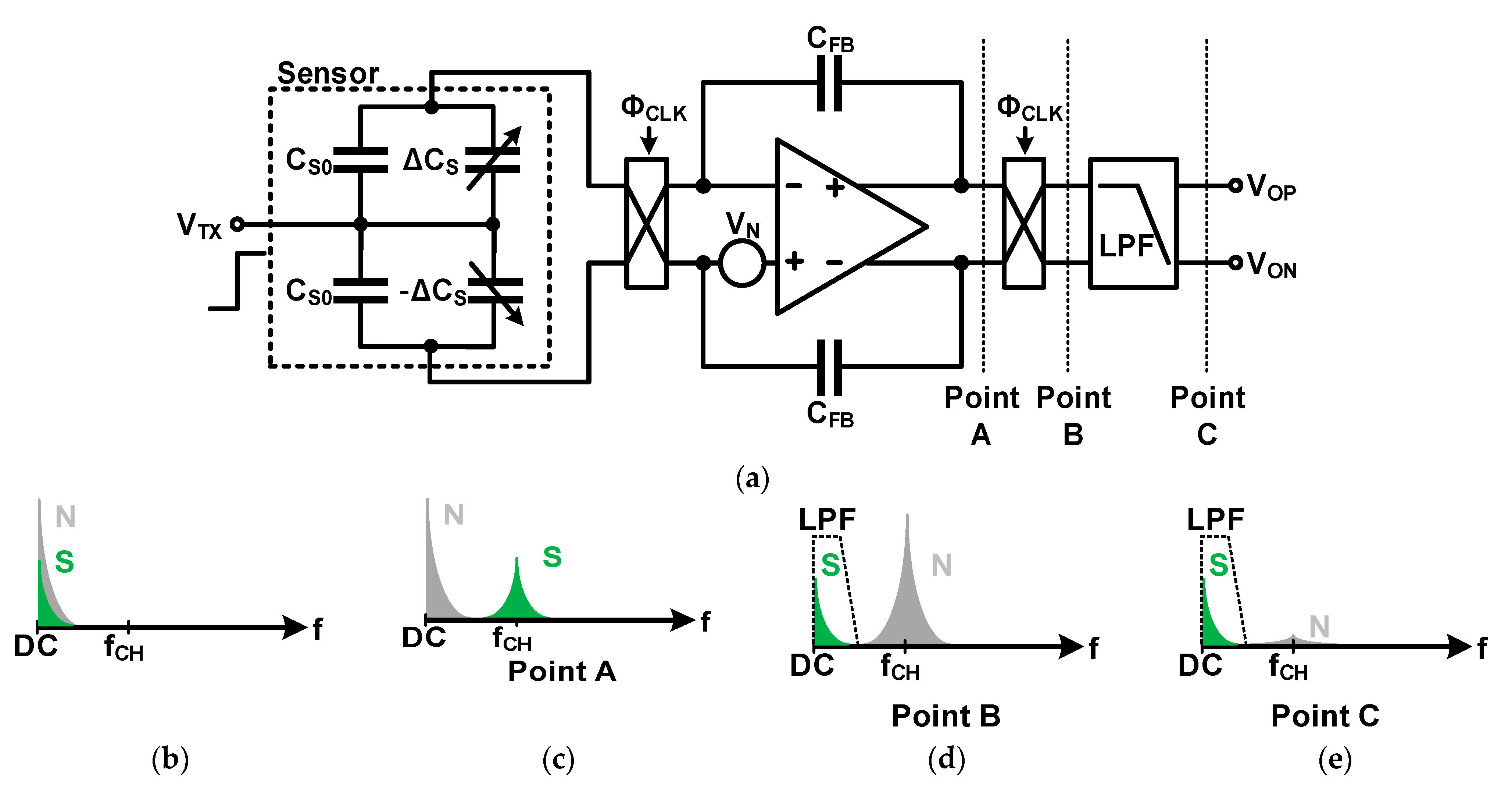
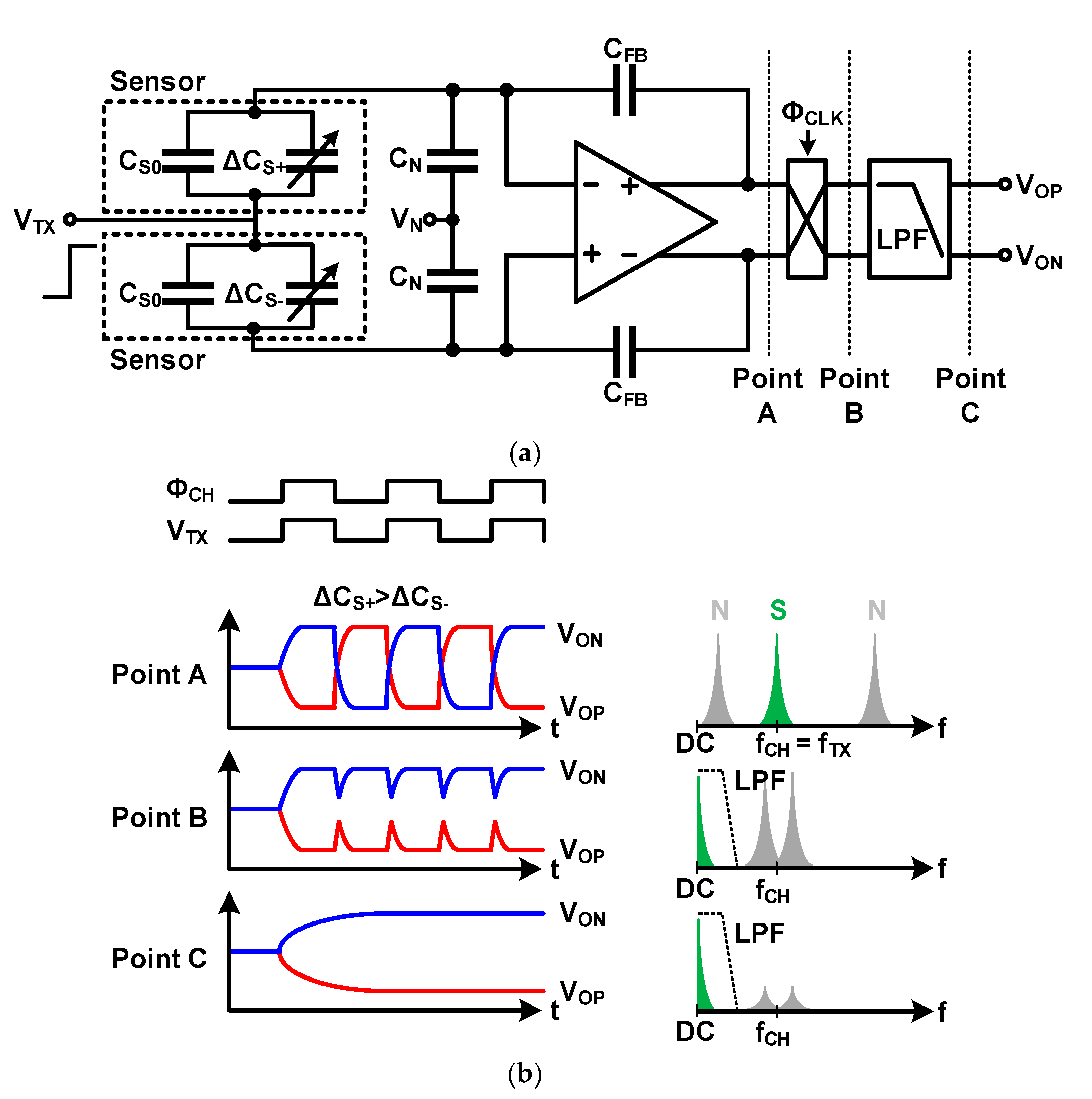
3.3.1. Fully Differential Structure and Chopper Stabilization
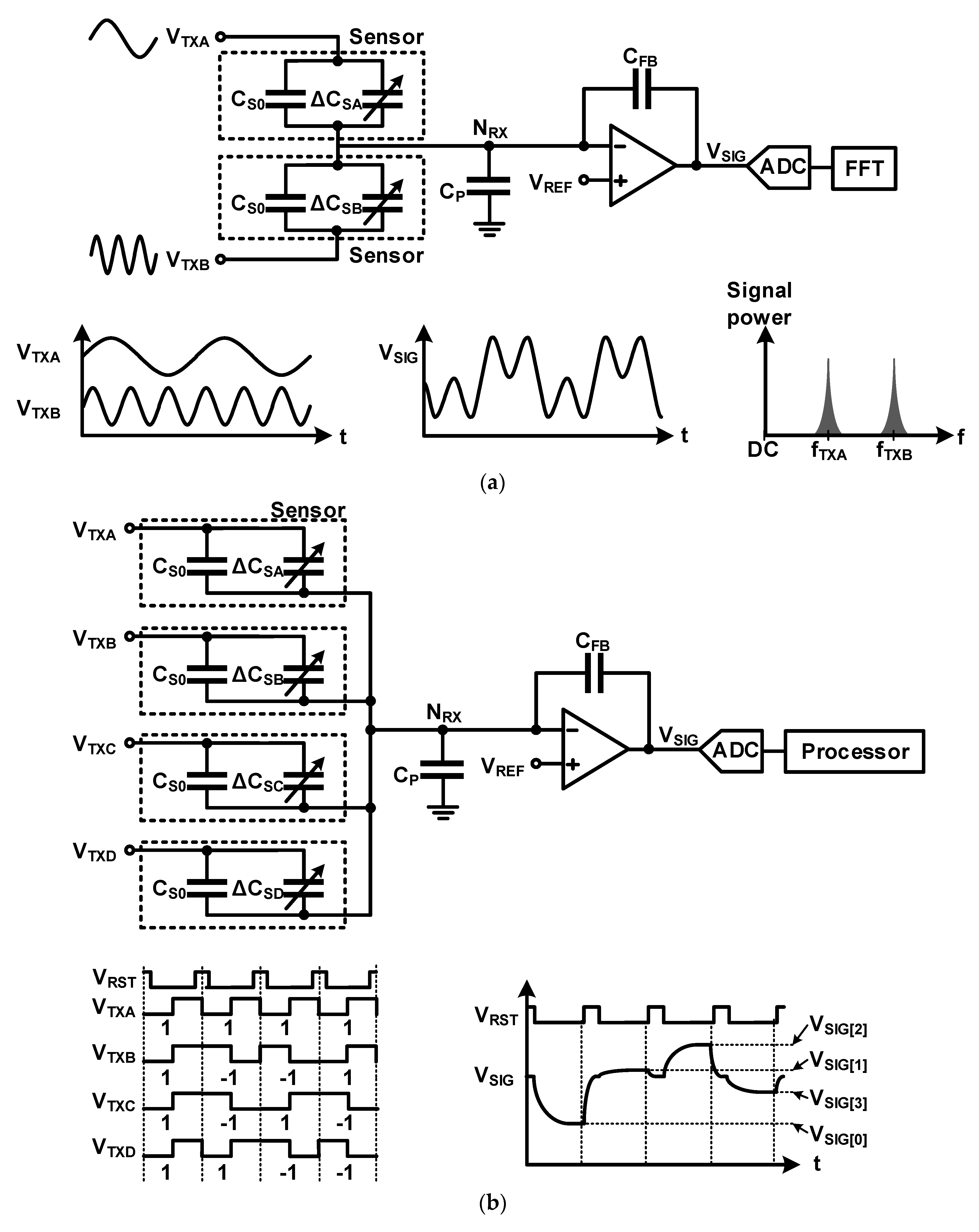
3.3.2. Averaging, Integration, and Parallel Driving Method
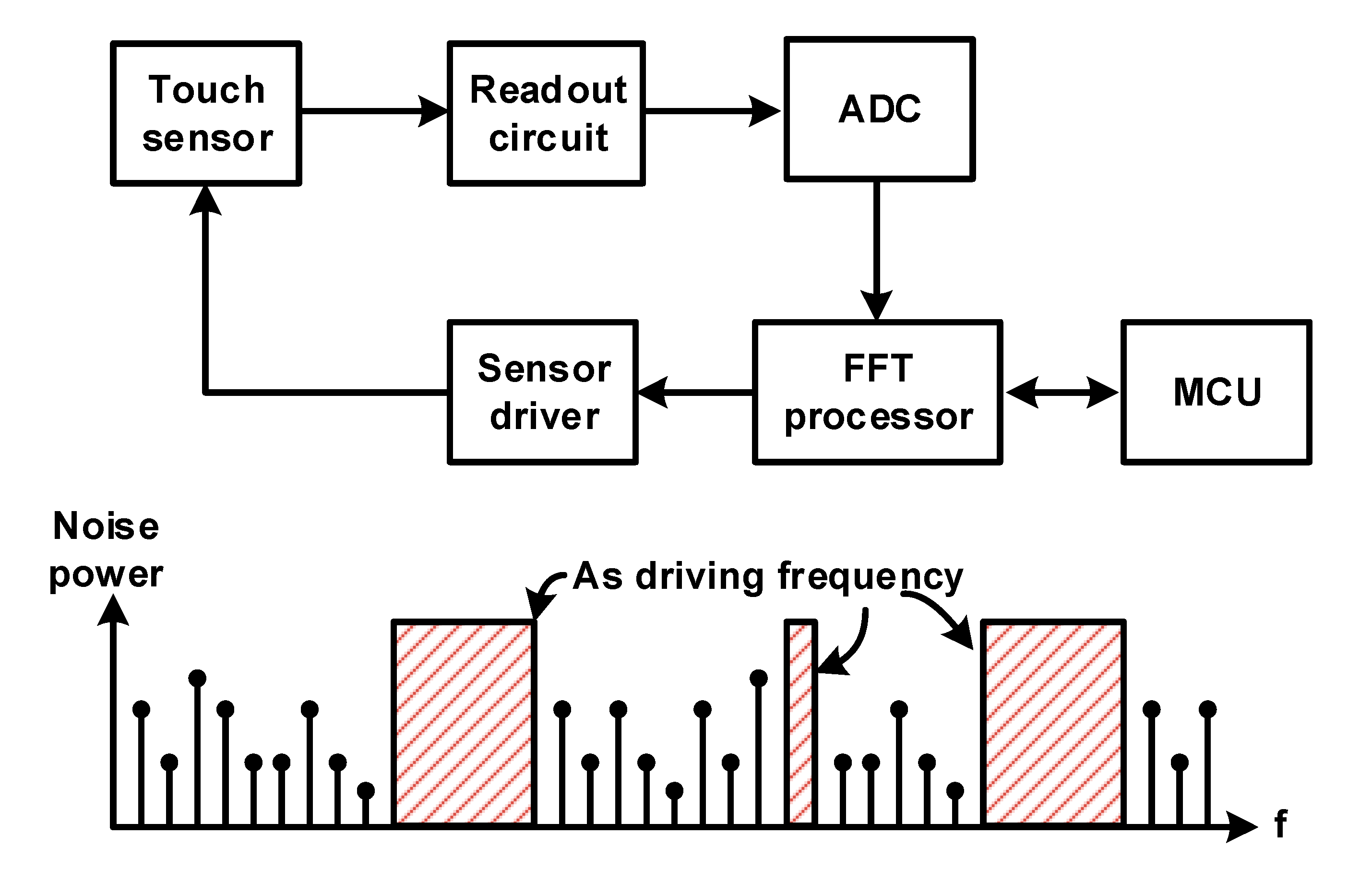
3.3.3. Frequency Adaption
3.3.4. Post-Processing
3.4. Power Consumption
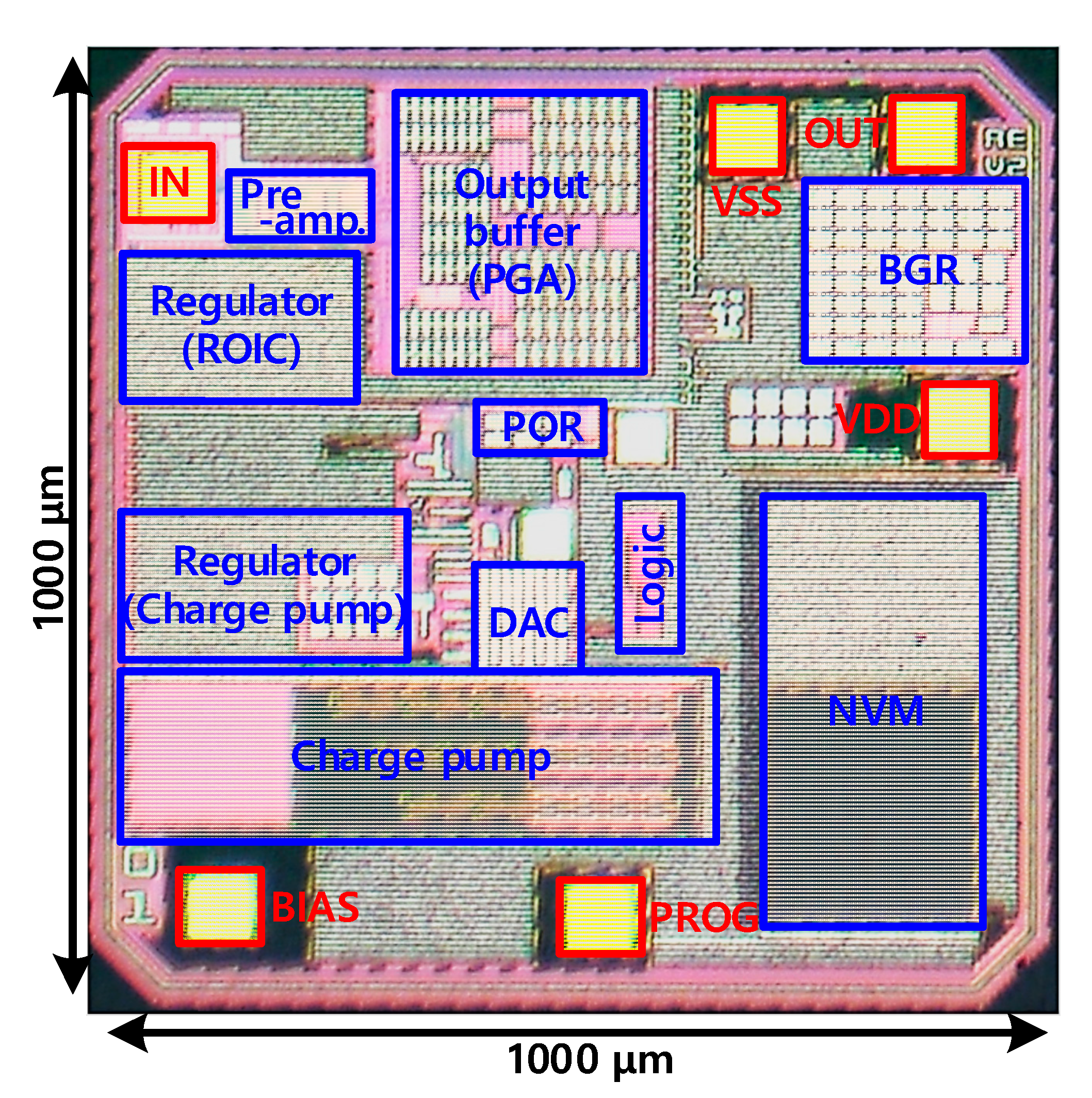
4. Design Example
4.1. Design for Minimizing Signal Power Degradation
4.2. Design for Noise Reduction
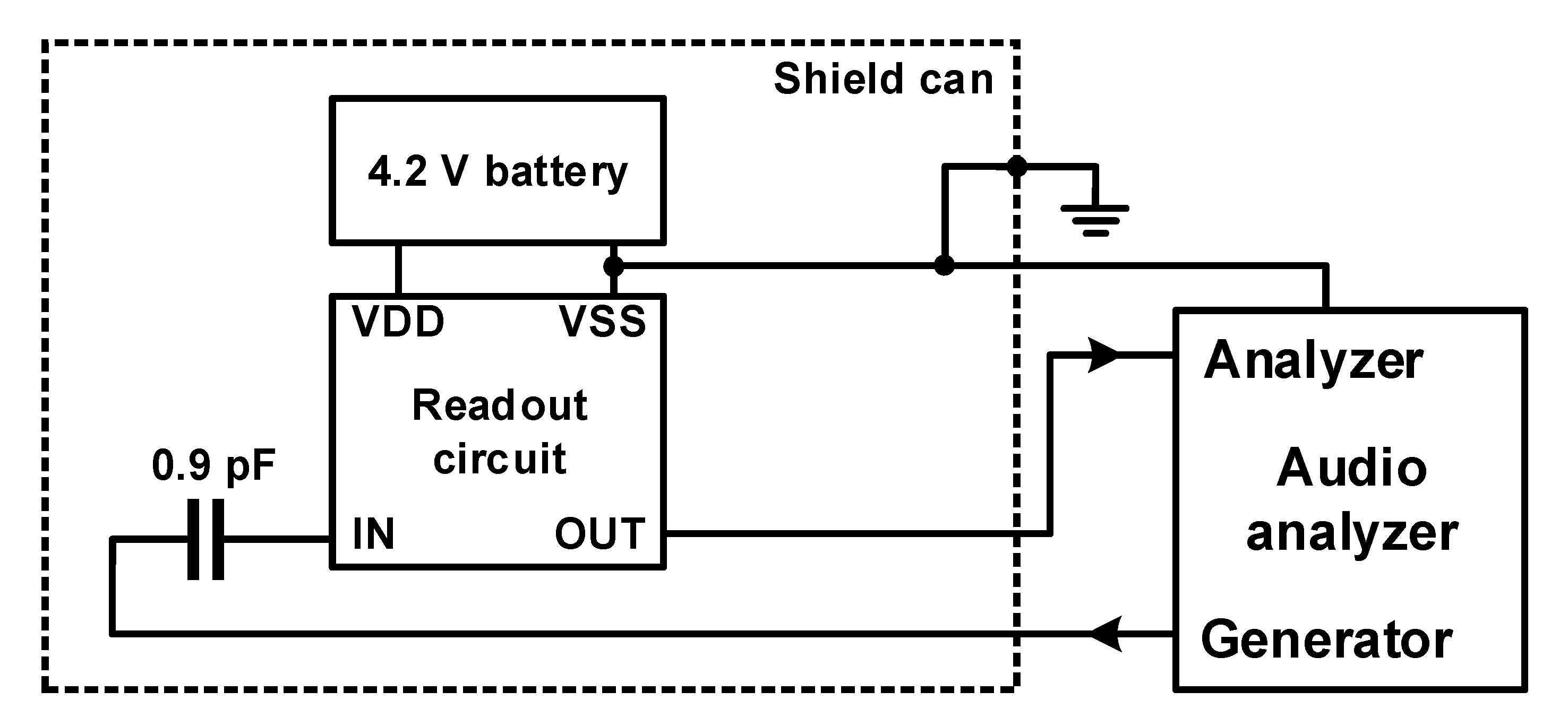
4.3. Measurement
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bogue, R. Towards the trillion sensors market. Sens. Rev. 2014, 34, 137–142. [Google Scholar] [CrossRef]
- Jayakumar, H.; Lee, K.; Lee, W.S.; Raha, A.; Kim, Y.; Raghunathan, V. Powering the internet of things. In Proceedings of the 2014 International Symposium on Low Power Electronics and Design, La Jolla, CA, USA, 11–13 August 2014; ACM: New York, NY, USA, 2014; Volume 2, pp. 375–380. [Google Scholar]
- Winncy, Y.D. Resistive, Capacitive, Inductive, and Magnetic Sensor Technologies; CRC Press: Boca Raton, FL, USA, 2014; ISBN 9780367864651. [Google Scholar]
- Tsuchiya, T. Technologies, applications, and reliabilities of microelectromechanical systems (MEMS). In Proceedings of the 9th SEGJ International Symposium, Sapporo, Japan, 12–14 October 2009. [Google Scholar]
- Rao, K.; Liu, H.; Wei, X.; Wu, W.; Hu, C.; Fan, J.; Liu, J.; Tu, L. A high-resolution area-change-based capacitive MEMS tilt sensor. Sens. Actuators A Phys. 2020, 313, 112191. [Google Scholar] [CrossRef]
- Elko, G.W.; Pardo, F.; López, D.; Bishop, D.; Gammel, P. Capacitive MEMS microphones. Bell Syst. Tech. J. 2005, 10, 187–198. [Google Scholar] [CrossRef]
- Mishra, M.K.; Dubey, V.; Mishra, P.M.; Khan, I. MEMS Technology: A Review. J. Eng. Res. Rep. 2019, 1–24. [Google Scholar] [CrossRef]
- Analog Devices Which ADC Architecture Is Right for Your Application? Available online: https://www.analog.com/en/analog-dialogue/articles/the-right-adc-architecture.html# (accessed on 16 June 2021).
- Ko, S.H.; Yang, B.D. An Ultra-Compact Low Power Self-Capacitive Touch Screen Readout IC Embedding Reconfigurable Noise Immunity and Current-Driven Capacitance Compensation. IEEE Trans. Circuits Syst. II Express Briefs 2018, 66, 1321–1325. [Google Scholar] [CrossRef]
- Ouh, H.K.; Choi, J.; Lee, J.; Han, S.; Kim, S.; Seo, J.; Lim, K.; Ko, H. Sub-fF trimmable readout circuit for tri-axes capacitive microaccelerometers. In Proceedings of the 2012 IEEE Sensors, Taipei, Taiwan, 28–31 October 2012; pp. 1–4. [Google Scholar]
- Shin, D.-Y.; Lee, H.; Kim, S. A Delta–Sigma Interface Circuit for Capacitive Sensors with an Automatically Calibrated Zero Point. IEEE Trans. Circuits Syst. II Express Briefs 2011, 58, 90–94. [Google Scholar] [CrossRef]
- Song, H.; Park, Y.; Kim, H.; Cho, D.-I.D.; Ko, H. Fully Integrated Low-Noise Readout Circuit with Automatic Offset Cancellation Loop for Capacitive Microsensors. Sensors 2015, 15, 26009–26017. [Google Scholar] [CrossRef] [Green Version]
- Lee, C.-J.; Park, J.K.; Piao, C.; Seo, H.-E.; Choi, J.; Chun, J.-H. Mutual Capacitive Sensing Touch Screen Controller for Ultrathin Display with Extended Signal Passband Using Negative Capacitance. Sensors 2018, 18, 3637. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Koickal, T.J.; Hamilton, A.; Mastropaolo, E.; Cheung, R.; Abel, A.; Smith, L.S.; Wang, L. A Power-Efficient Capacitive Read-Out Circuit With Parasitic-Cancellation for MEMS Cochlea Sensors. IEEE Trans. Biomed. Circuits Syst. 2016, 10, 25–37. [Google Scholar] [CrossRef] [PubMed]
- Sisinni, E.; Depari, A.; Flammini, A.; Ferri, G.; Stornelli, V.; Barile, G. Full-Analog Parasitic Capacitance Compensation for AC-Excited Differential Sensors. IEEE Trans. Instrum. Meas. 2020, 69, 5890–5899. [Google Scholar] [CrossRef]
- Ciccarella, P.; Carminati, M.; Sampietro, M.; Ferrari, G. Multichannel 65 zF rms Resolution CMOS Monolithic Capacitive Sensor for Counting Single Micrometer-Sized Airborne Particles on Chip. IEEE J. Solid State Circuits 2016, 51, 2545–2553. [Google Scholar] [CrossRef]
- Sanchez-Chiva, J.M.; Michalik, P.; Fernandez, D.; Madrenas, J. A CMOS BEOL accelerometer low-noise readout amplifier with 4.2 zF/√Hz total noise floor. In Proceedings of the 2015 IEEE Sensors, Busan, Korea, 1–4 November 2015; IEEE: Busan, Korea, 2015; pp. 1–4. [Google Scholar]
- Huh, Y.; Hong, S.-W.; Park, S.-H.; Shin, C.; Bang, J.-S.; Park, C.; Park, S.; Cho, G.-H. A 10.1” 183- μW/electrode, 0.73-mm2/sensor High-SNR 3-D Hover Sensor Based on Enhanced Signal Refining and Fine Error Calibrating Techniques. IEEE J. Solid-State Circuits 2017, 53, 1079–1088. [Google Scholar] [CrossRef]
- Zhong, L.; Lai, X.; Xu, D. Oversampling Successive Approximation Technique for MEMS Differential Capacitive Sensor. IEEE J. Solid State Circuits 2018, 53, 2240–2251. [Google Scholar] [CrossRef]
- Zhong, L.; Lai, X.; Song, H.; Xu, D. Differential Capacitive Readout Circuit Using Oversampling Successive Approximation Technique. IEEE Trans. Circuits Syst. I Regul. Pap. 2018, 65, 4072–4085. [Google Scholar] [CrossRef]
- Wang, Y.M.; Chan, P.K.; Li, H.; Ong, S.-E. A Low-Power Highly Sensitive Capacitive Accelerometer IC Using Auto-Zero Time-Multiplexed Differential Technique. IEEE Sens. J. 2015, 15, 6179–6191. [Google Scholar] [CrossRef]
- Yeo, D.-H.; Kim, S.-H.; Noh, H.-K.; Kim, B.; Sim, J.-Y.; Park, H.-J. A SNR-Enhanced Mutual-Capacitive Touch-Sensor ROIC using an Averaging with Three Specific TX Frequencies, a Noise Memory, and a Compact Delay Compensation Circuit. IEEE Sens. J. 2016, 16, 6931–69381. [Google Scholar] [CrossRef]
- Nicollini, G.; Devecchi, D. MEMS Capacitive Microphones: Acoustical, Electrical, and Hidden Thermal-Related Issues. IEEE Sens. J. 2018, 18, 5386–5394. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhao, J.; Wang, X.; Xia, G.M.; Shi, Q.; Qiu, A.P.; Xu, Y.P. A Sub-0.1°/h Bias-Instability Split-Mode MEMS Gyroscope With CMOS Readout Circuit. IEEE J. Solid-State Circuits 2018, 53, 2636–2650. [Google Scholar] [CrossRef]
- Pérez Sanjurjo, J.; Prefasi, E.; Buffa, C.; Gaggl, R. A Capacitance-To-Digital Converter for MEMS Sensors for Smart Applications. Sensors 2017, 17, 1312. [Google Scholar] [CrossRef] [PubMed]
- Heinssen, S.; Hellwege, N.; Heidmann, N.; Paul, S.; Peters-Drolshagen, D. Robust digital calibration engine for MEMS inertial sensor systems. In Proceedings of the 2015 IEEE Sensors, Busan, Korea, 1–4 November 2015; IEEE: Busan, Korea, 2015; pp. 1–4. [Google Scholar]
- Park, J.-E.; Park, J.; Hwang, Y.-H.; Oh, J.; Jeong, D.-K. A Noise-Immunity-Enhanced Analog Front-End for 36 × 64 Touch-Screen Controllers With 20-VPP Noise Tolerance at 100 kHz. IEEE J. Solid-State Circuits 2019, 54, 1497–1510. [Google Scholar] [CrossRef]
- Park, J.-E.; Lim, D.-H.; Jeong, D.-K. A Reconfigurable 40-to-67 dB SNR, 50-to-6400 Hz Frame-Rate, Column-Parallel Readout IC for Capacitive Touch-Screen Panels. IEEE J. Solid-State Circuits 2014, 49, 2305–2318. [Google Scholar] [CrossRef]
- Petkov, V.P.; Balachandran, G.K.; Beintner, J. A Fully Differential Charge-Balanced Accelerometer for Electronic Stability Control. IEEE J. Solid-State Circuits 2014, 49, 262–270. [Google Scholar] [CrossRef]
- An, J.-S.; Jung, S.-J.; Hong, S.-K.; Kwon, O.-K. A Highly Noise-Immune Capacitive Touch Sensing System Using an Adaptive Chopper Stabilization Method. IEEE Sens. J. 2017, 17, 803–811. [Google Scholar] [CrossRef]
- Lee, J.-S.; Yeo, D.-H.; Kwon, H.-J.; Kim, B.; Sim, J.-Y.; Park, H.-J. An LCD-VCOM-Noise Resilient Mutual-Capacitive Touch-Sensor IC Chip With a Low-Voltage Driving Signal. IEEE Sens. J. 2015, 15, 4595–4602. [Google Scholar] [CrossRef]
- An, J.-S.; Han, S.-H.; Kim, J.E.; Yoon, D.-H.; Kim, Y.-H.; Hong, H.-H.; Ye, J.-H.; Jung, S.-J.; Lee, S.-H.; Jeong, J.-Y.; et al. A 3.9-kHz Frame Rate and 61.0-dB SNR Analog Front-End IC with 6-bit Pressure and Tilt Angle Expressions of Active Stylus Using Multiple-Frequency Driving Method for Capacitive Touch Screen Panels. IEEE J. Solid-State Circuits 2018, 53, 187–203. [Google Scholar] [CrossRef]
- Kim, S.; Rikan, B.S.; Pu, Y.; Yoo, S.-S.; Lee, M.; Hwang, K.C.; Yang, Y.; Lee, K.-Y. A High Noise Immunity, 28 × 16-Channel Finger Touch Sensing IC Using OFDM and Frequency Translation Technique. Sensors 2018, 18, 1652. [Google Scholar] [CrossRef] [Green Version]
- Luo, Y.; Heng, C. An 8.2 µw 0.14 mm 2 16-channel CDMA-like period modulation capacitance-to-digital converter with reduced data throughput. In Proceedings of the 2018 IEEE Symposium on VLSI Circuits, Honolulu, HI, USA, 18–22 June 2018; IEEE: Honolulu, HI, USA, 2018; pp. 165–166. [Google Scholar]
- Jang, H.; Shin, H.; Ko, S.; Yun, I.; Lee, K. 2D Coded-aperture-based ultra-compact capacitive touch-screen controller with 40 reconfigurable channels. In Proceedings of the 2014 IEEE International Solid-State Circuits Conference Digest of Technical Papers (ISSCC), San Francisco, CA, USA, 9–13 February 2014; IEEE: San Francisco, CA, USA, 2014; Volume 57, pp. 218–219. [Google Scholar]
- Heo, S.; Ma, H.; Song, J.; Park, K.; Choi, E.-H.; Kim, J.J.; Bien, F. 72 dB SNR, 240 Hz Frame Rate Readout IC With Differential Continuous-Mode Parallel Architecture for Larger Touch-Screen Panel Applications. IEEE Trans. Circuits Syst. I Regul. Pap. 2016, 63, 960–971. [Google Scholar] [CrossRef]
- Park, C.; Park, S.S.; Kim, K.D.; Park, S.S.; Park, J.; Huh, Y.; Kang, B.; Cho, G.H. A pen-pressure-sensitive capacitive touch system using electrically coupled resonance pen. Dig. Tech. Pap. IEEE Int. Solid-State Circuits Conf. 2015, 58, 124–125. [Google Scholar] [CrossRef]
- Heo, S.; Park, K.; Choi, E.-H.; Bien, F. Differential Coded Multiple Signaling Method With Fully Differential Receiver for Mutual Capacitive Fingerprint TSP. IEEE Trans. Circuits Syst. I Regul. Pap. 2020, 67, 74–85. [Google Scholar] [CrossRef]
- Ko, S.H. A -24 dB in-Band Noise-Immunity Mutual Capacitance Readout System for Variable Refresh Rate of Active-Matrix OLED Display. IEEE Trans. Circuits Syst. I Regul. Pap. 2020, 67, 1126–1135. [Google Scholar] [CrossRef]
- Kim, P.; Han, S.; Jung, Y.; Lee, S. A PAPR Reduction Technique for Fast Touch Sensors Adopting a Multiple Frequency Driving Method on Large Display Panels. Sensors 2021, 21, 429. [Google Scholar] [CrossRef] [PubMed]
- Ko, S.H. A Mutual-Capacitance 3-D Gesture Sensing System Based on 2-D Orthogonal Encoding and an Un-Folding Coordinate Interpolation Schemes. IEEE Sens. J. 2020, 20, 4778–4786. [Google Scholar] [CrossRef]
- Miyamoto, M.; Hamaguchi, M.; Nagao, A. A 143 × 81 Mutual-Capacitance Touch-Sensing Analog Front-End With Parallel Drive and Differential Sensing Architecture. IEEE J. Solid-State Circuits 2015, 50, 335–343. [Google Scholar] [CrossRef]
- Zhong, L.; Lai, X.; Xu, D.; Liao, X.; Yang, C.; Fang, Z.; Zheng, Y. Capacitive Touch Panel With Low Sensitivity to Water Drop Employing Mutual-Coupling Electrical Field Shaping Technique. IEEE Trans. Circuits Syst. I Regul. Pap. 2019, 66, 1393–1404. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.-M.; YU, H.C.; Chih-Hung, K.; Huang, S.-H. Adsorption of Cationic Dyes onto Mesoporous Silica. US9280243B2, 1 May 2011. [Google Scholar]
- Ha, H.; Sylvester, D.; Blaauw, D.; Sim, J.Y. A 160nW 63.9fJ/conversion-step capacitance-to-digital converter for ultra-low-power wireless sensor nodes. Dig. Tech. Pap. IEEE Int. Solid-State Circuits Conf. 2014, 57, 220–221. [Google Scholar] [CrossRef]
- Park, J.; Hwang, Y.-H.; Oh, J.; Song, Y.; Park, J.-E.; Jeong, D.-K. A Mutual Capacitance Touch Readout IC With 64% Reduced-Power Adiabatic Driving Over Heavily Coupled Touch Screen. IEEE J. Solid-State Circuits 2019, 54, 1694–1704. [Google Scholar] [CrossRef]
- Oh, S.; Lee, Y.; Wang, J.; Foo, Z.; Kim, Y.; Jung, W.; Li, Z.; Blaauw, D.; Sylvester, D. A Dual-Slope Capacitance-to-Digital Converter Integrated in an Implantable Pressure-Sensing System. IEEE J. Solid-State Circuits 2015, 50, 1581–1591. [Google Scholar] [CrossRef]
- Kim, H.; Lee, B.; Mun, Y.; Kim, J.; Han, K.; Roh, Y.; Song, D.; Huh, S.; Ko, H. Reconfigurable Sensor Analog Front-End Using Low-Noise Chopper-Stabilized Delta-Sigma Capacitance-to-Digital Converter. Micromachines 2018, 9, 347. [Google Scholar] [CrossRef] [Green Version]
- Amini, S.; Johns, D.A. A Flexible Charge-Balanced Ratiometric Open-Loop Readout System for Capacitive Inertial Sensors. IEEE Trans. Circuits Syst. II Express Briefs 2015, 62, 317–321. [Google Scholar] [CrossRef]
- Omran, H.; Alhoshany, A.; Alahmadi, H.; Salama, K.N. A 35fJ/Step differential successive approximation capacitive sensor readout circuit with quasi-dynamic operation. IEEE Symp. VLSI Circuits Dig. Tech. Pap. 2016, 2016, 1–2. [Google Scholar] [CrossRef]
- Omran, H.; Alhoshany, A.; Alahmadi, H.; Salama, K.N. A 33fJ/Step SAR Capacitance-to-Digital Converter Using a Chain of Inverter-Based Amplifiers. IEEE Trans. Circuits Syst. I Regul. Pap. 2017, 64, 310–321. [Google Scholar] [CrossRef]
- Liu, B.; Hoseini, Z.; Lee, K.-S.; Lee, Y.-M. On-Chip Touch Sensor Readout Circuit Using Passive Sigma-Delta Modulator Capacitance-to-Digital Converter. IEEE Sens. J. 2015, 15, 3893–3902. [Google Scholar] [CrossRef]
- Xin, H.; Pelzers, K.; Baltus, P.; Cantatore, E.; Harpe, P. A 4.3 fJ/conversion-step 6440 μm 2 all-dynamic capacitance-to-digital converter with energy-efficient charge reuse. In Proceedings of the 2020 IEEE Symposium on VLSI Circuits, Honolulu, HI, USA, 14–19 June 2020; IEEE: Honolulu, HI, USA, 2020; Volume 2020, pp. 1–2. [Google Scholar]
- Hussaini, S.; Jiang, H.; Walsh, P.; MacSweeney, D.; Makinwa, K.A.A. A 15-nW per Sensor Interference-Immune Readout IC for Capacitive Touch Sensors. IEEE J. Solid-State Circuits 2019, 54, 1874–1882. [Google Scholar] [CrossRef] [Green Version]
- Zhong, L.; Yang, J.; Xu, D.; Lai, X. Bandwidth-Enhanced Oversampling Successive Approximation Readout Technique for Low-Noise Power-Efficient MEMS Capacitive Accelerometer. IEEE J. Solid-State Circuits 2020, 55, 2529–2538. [Google Scholar] [CrossRef]
- Duan, Q.; Wang, Z.; Roh, J. A 7.5-μW 0.08-mm 2 single-ended SC delta-sigma ADC for acoustic sensor applications. Int. J. Circuit Theory Appl. 2015, 44, 1173–1185. [Google Scholar] [CrossRef]
- Quintero, A.; Cardes, F.; Perez, C.; Buffa, C.; Wiesbauer, A.; Hernandez, L. A VCO-Based CMOS Readout Circuit for Capacitive MEMS Microphones. Sensors 2019, 19, 4126. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, S.; Zhao, W.; Xu, B.; Yang, X.; Tang, X.; Shen, L.; Lu, N.; Pan, D.Z.; Sun, N. A 0.025-mm 2 0.8-V 78.5dB-SNDR VCO-based sensor readout circuit in a hybrid PLL-ΔΣM structure. In Proceedings of the 2019 IEEE Custom Integrated Circuits Conference (CICC), Austin, TX, USA, 14–17 April 2019; IEEE: Austin, TX, USA, 2019; Volume 2019, pp. 1–3. [Google Scholar]
- Quintero, A.; Cardes, F.; Hernandez, L.; Buffa, C.; Wiesbauer, A. A capacitance-to-digital converter based on a ring oscillator with flicker noise reduction. In Proceedings of the 2016 Austrochip Workshop on Microelectronics (Austrochip), Villach, Austria, 19 October 2016; IEEE: Villach, Austria, 2016; pp. 40–44. [Google Scholar]
- Tu, C.C.; Wang, Y.K.; Lin, T.H. A 0.06 mm2 ± 50 mV range-82 dB THD chopper VCO-based sensor readout circuit in 40 nm CMOS. In Proceedings of the IEEE Symposium on VLSI Circuits, Digest of Technical Papers, Kyoto, Japan, 5–8 June 2017; IEEE: Kyoto, Japan, 2017; pp. C84–C85. [Google Scholar]
- Yang, Y.; Lee, B.; Cho, J.S.; Kim, S.; Lee, H. A Digital Capacitive MEMS Microphone for Speech Recognition With Fast Wake-Up Feature Using a Sound Activity Detector. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 1509–1513. [Google Scholar] [CrossRef]
- Brüel&Kjær. Microphone Handbook Vol. 1: Theory; Brüel&Kjær: Naerum, Denmark, 2019. [Google Scholar]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Application | Total | |||||
|---|---|---|---|---|---|---|
| Issues | Touch | Accelerometer | Pressure | Concentration | Etc. | |
| SNR | 12 | 15 | 2 | 1 | 3 | 33 |
| Power consumption | 5 | 1 | 5 | 1 | 1 | 13 |
| Sensing speed | 4 | - | 2 | - | - | 6 |
| Sensitivity | 1 | - | - | 2 | 2 | 5 |
| Etc. | 2 | 1 | - | - | 2 | 5 |
| Readout method | 1 | 1 | - | 1 | - | 3 |
| Total | 25 | 18 | 9 | 5 | 8 | 65 |
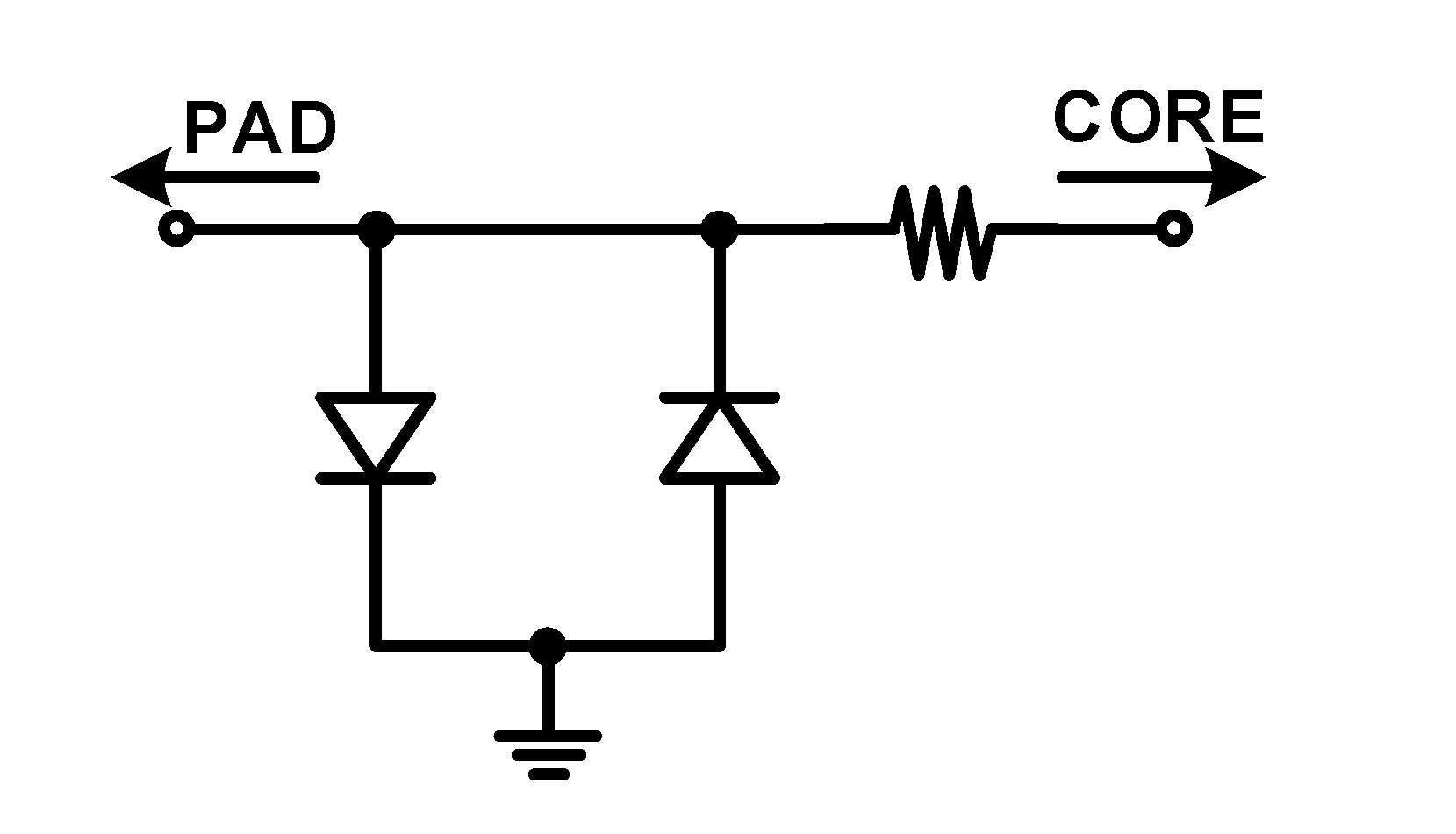
| PAD IP | Customized PAD | ||
|---|---|---|---|
| W/O Shield | With Shield | ||
| Parasitic capacitance | 2.705 pF | 0.334 pF | 0.201 pF |
| Signal degradation 1 | −12.053 dB | −2.738 dB | −1.734 dB |
| Post-Layout Simulation | Measurement | |||
|---|---|---|---|---|
| Program Code | 0 dB Gain | 5 dB Gain | 0 dB Gain | 5 dB Gain |
| Sensitivity | −38.60 dBV | −34.13 dBV | −39.11 dBV | −33.76 dBV |
| Measured gain | −0.6 dB | +3.87 dB | −1.11 dB | +4.24 dB |
| Total noise level (A) 1 | −103.84 dBV | −102.11 dBV | −106.64 dBV | −101.86 dBV |
| SNR (A) 1 | 65.24 dBA | 67.97 dBA | 66.08 dBA | 68.23 dBA |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yoo, Y.; Choi, B.-D. Readout Circuits for Capacitive Sensors. Micromachines 2021, 12, 960. https://doi.org/10.3390/mi12080960
Yoo Y, Choi B-D. Readout Circuits for Capacitive Sensors. Micromachines. 2021; 12(8):960. https://doi.org/10.3390/mi12080960
Chicago/Turabian StyleYoo, Yongsang, and Byong-Deok Choi. 2021. "Readout Circuits for Capacitive Sensors" Micromachines 12, no. 8: 960. https://doi.org/10.3390/mi12080960
APA StyleYoo, Y., & Choi, B. -D. (2021). Readout Circuits for Capacitive Sensors. Micromachines, 12(8), 960. https://doi.org/10.3390/mi12080960