
Design, Simulation, and Fabrication of a Copper–Chrome-Based Glass Heater Integrated into a PMMA Microfluidic System




Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials, Equipment, and Software
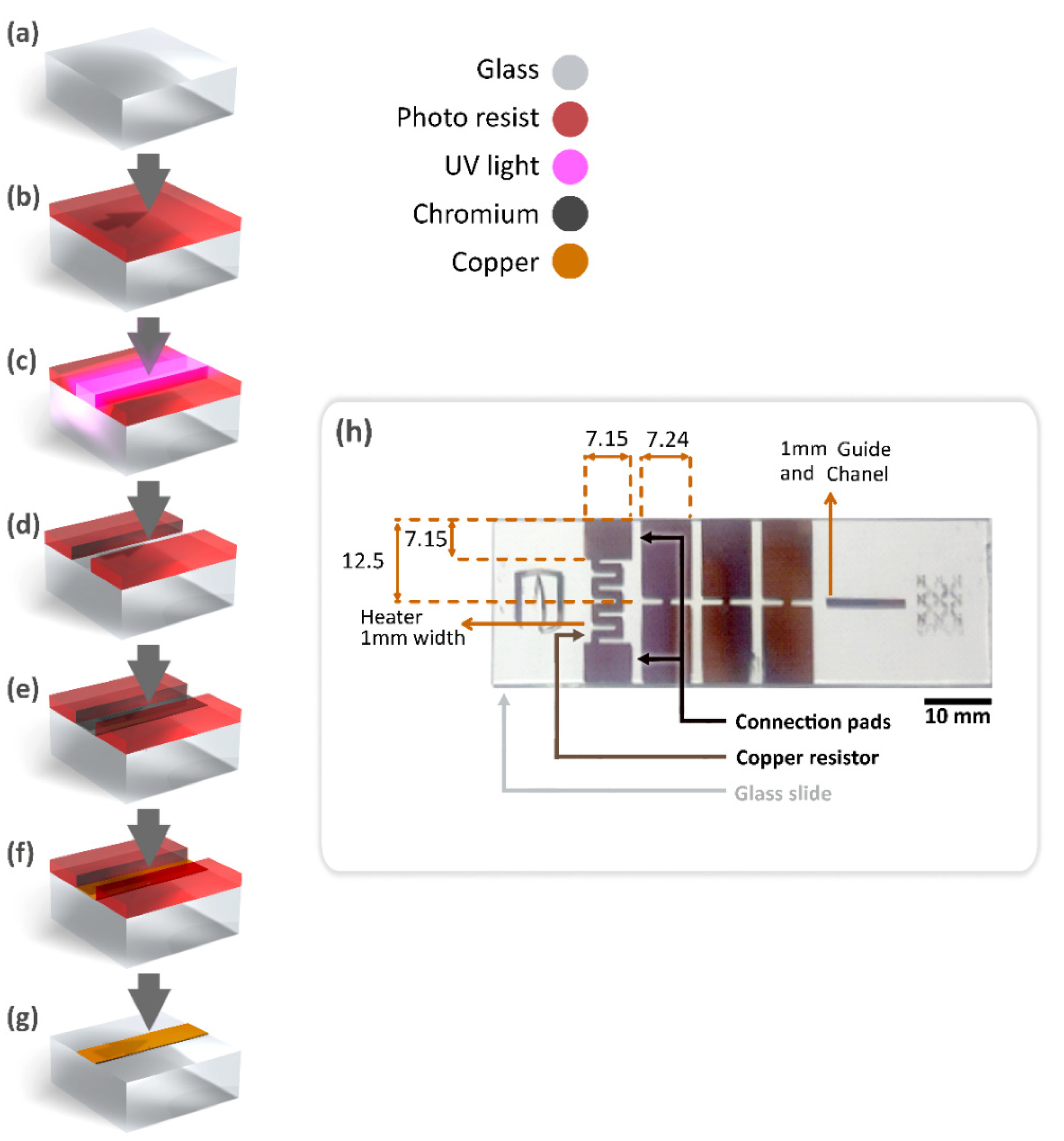
2.2. Copper–Chrome-Based Glass Heater
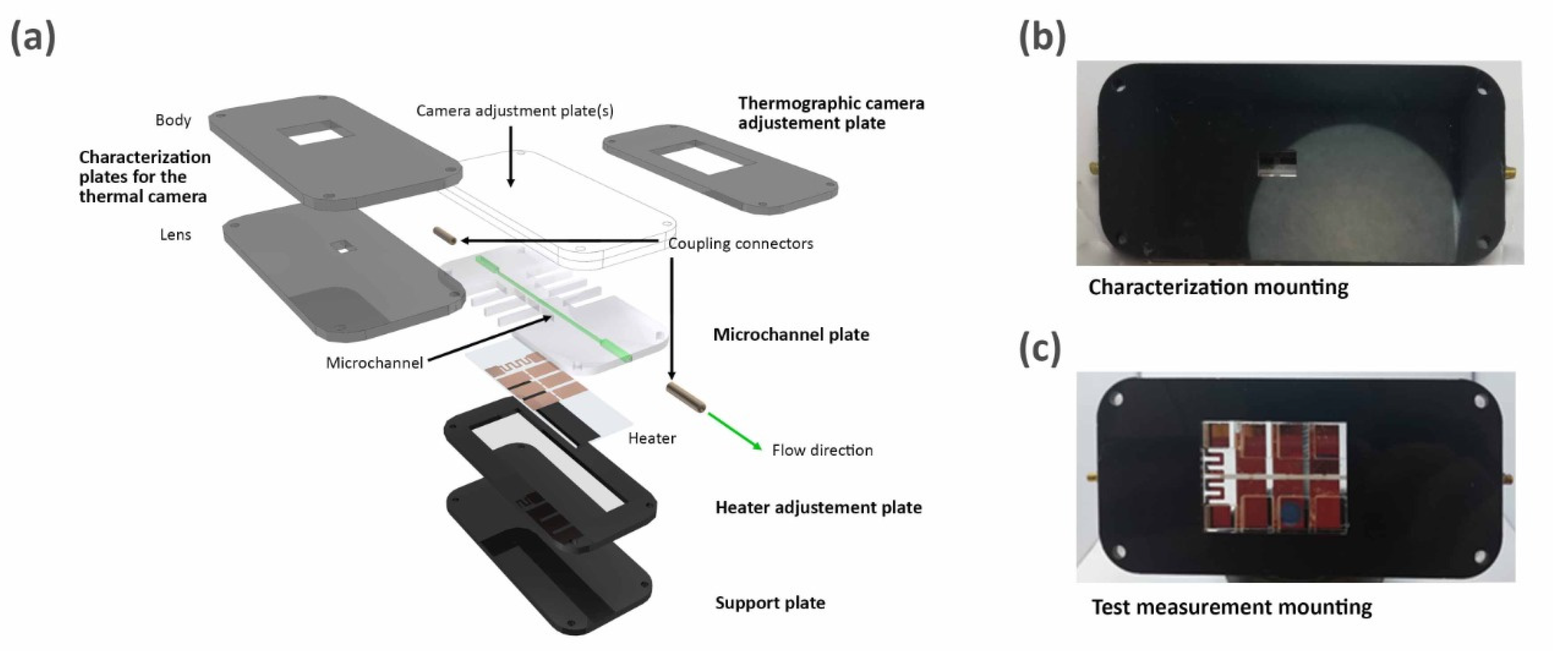
2.3. Microsystem Assembly Process
2.4. Electrothermal Characterization
2.5. Electrothermal Simulation
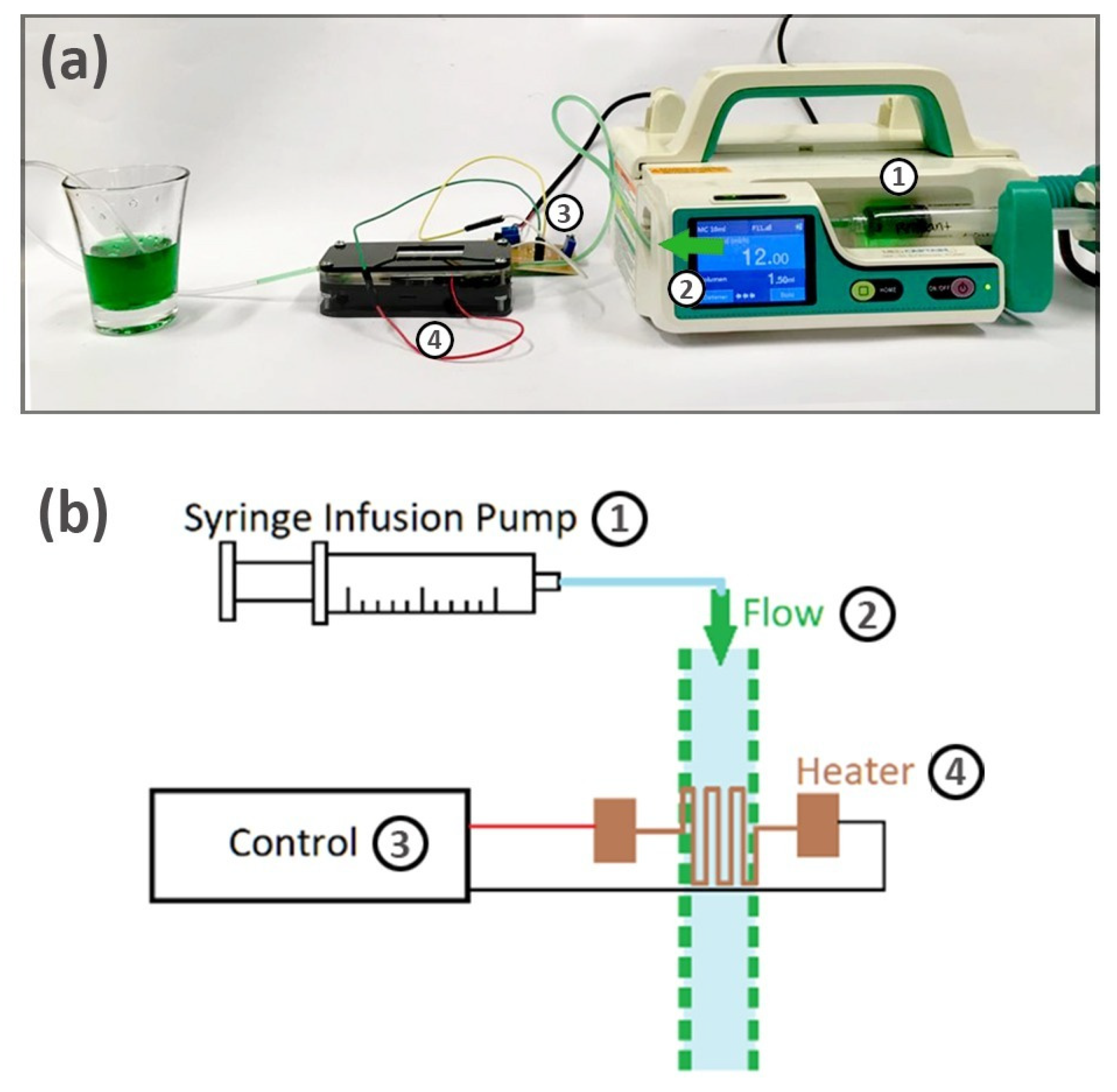
2.6. Point Thermal Characterization of the Fluid
3. Results
3.1. Theoretical and Practical Resistance Analysis
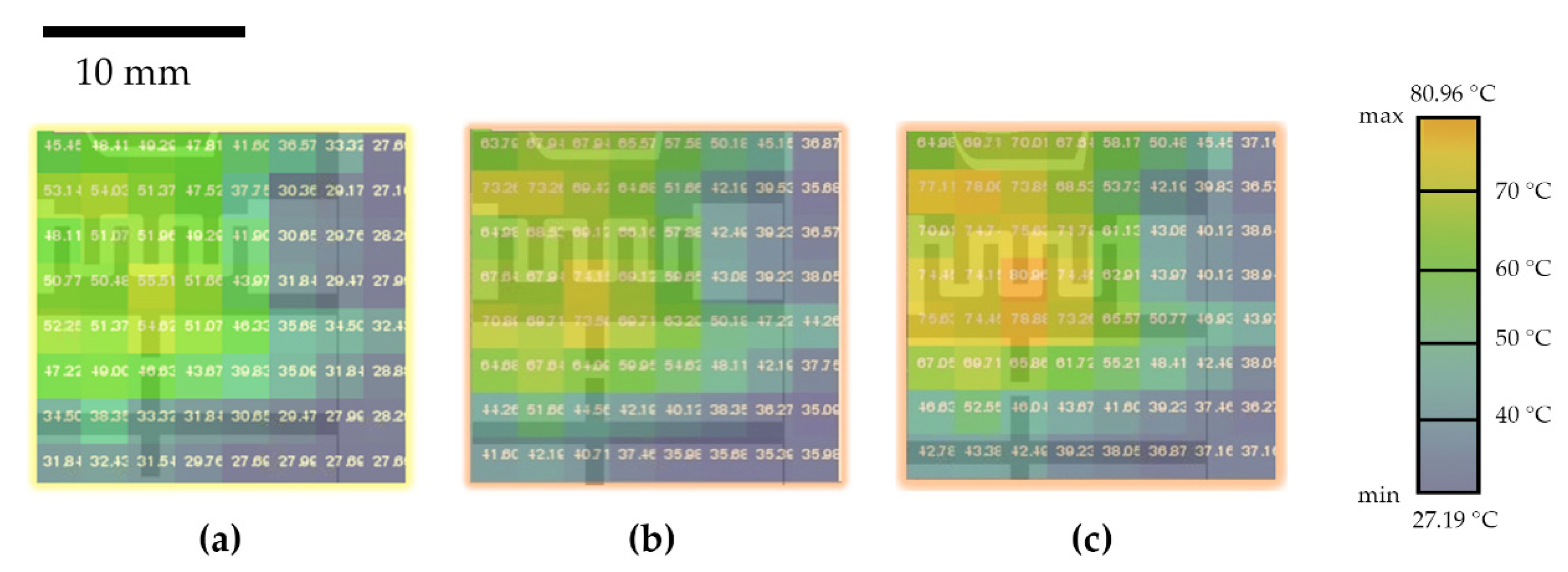
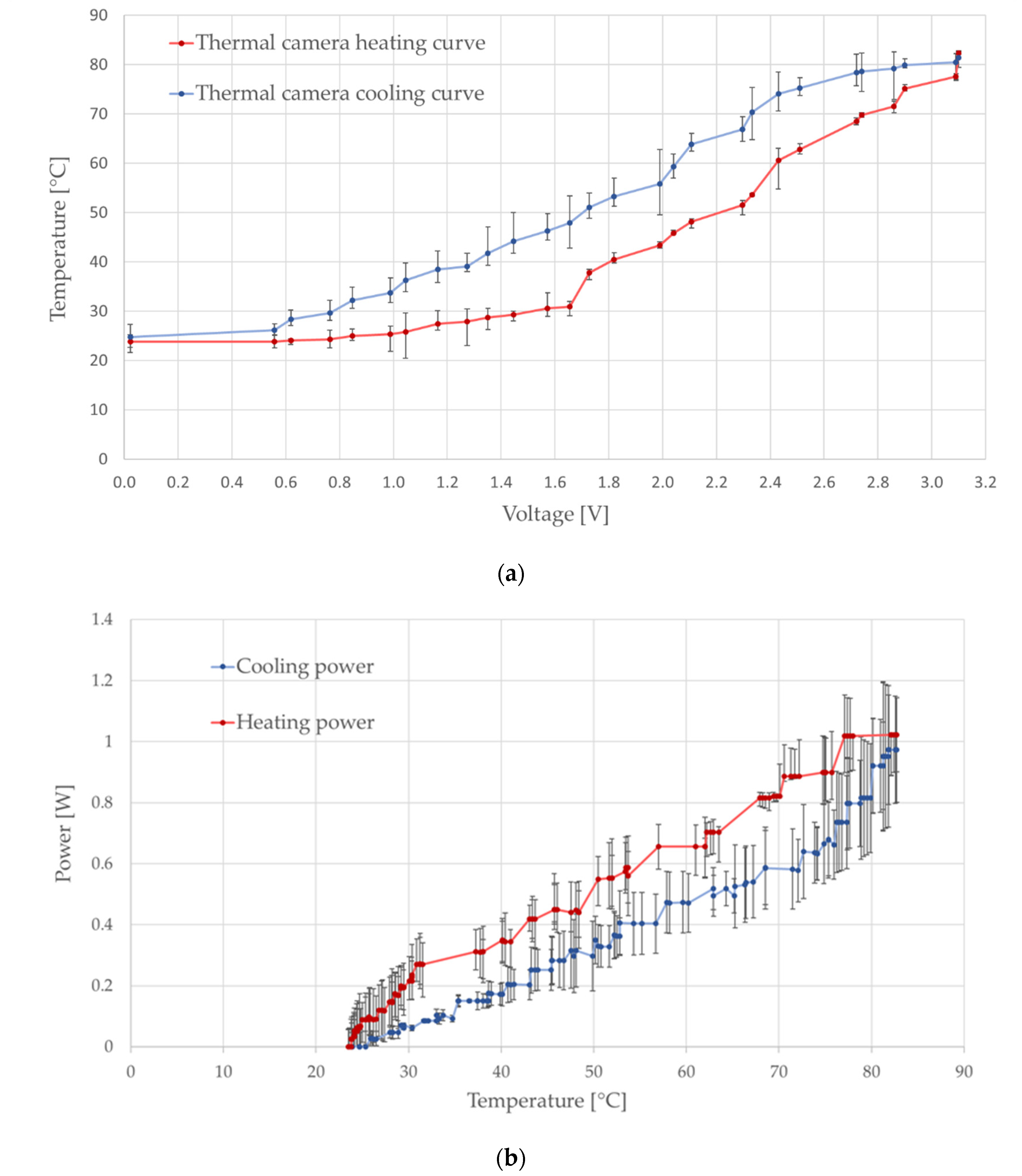
3.2. Thermal Camera Characterization
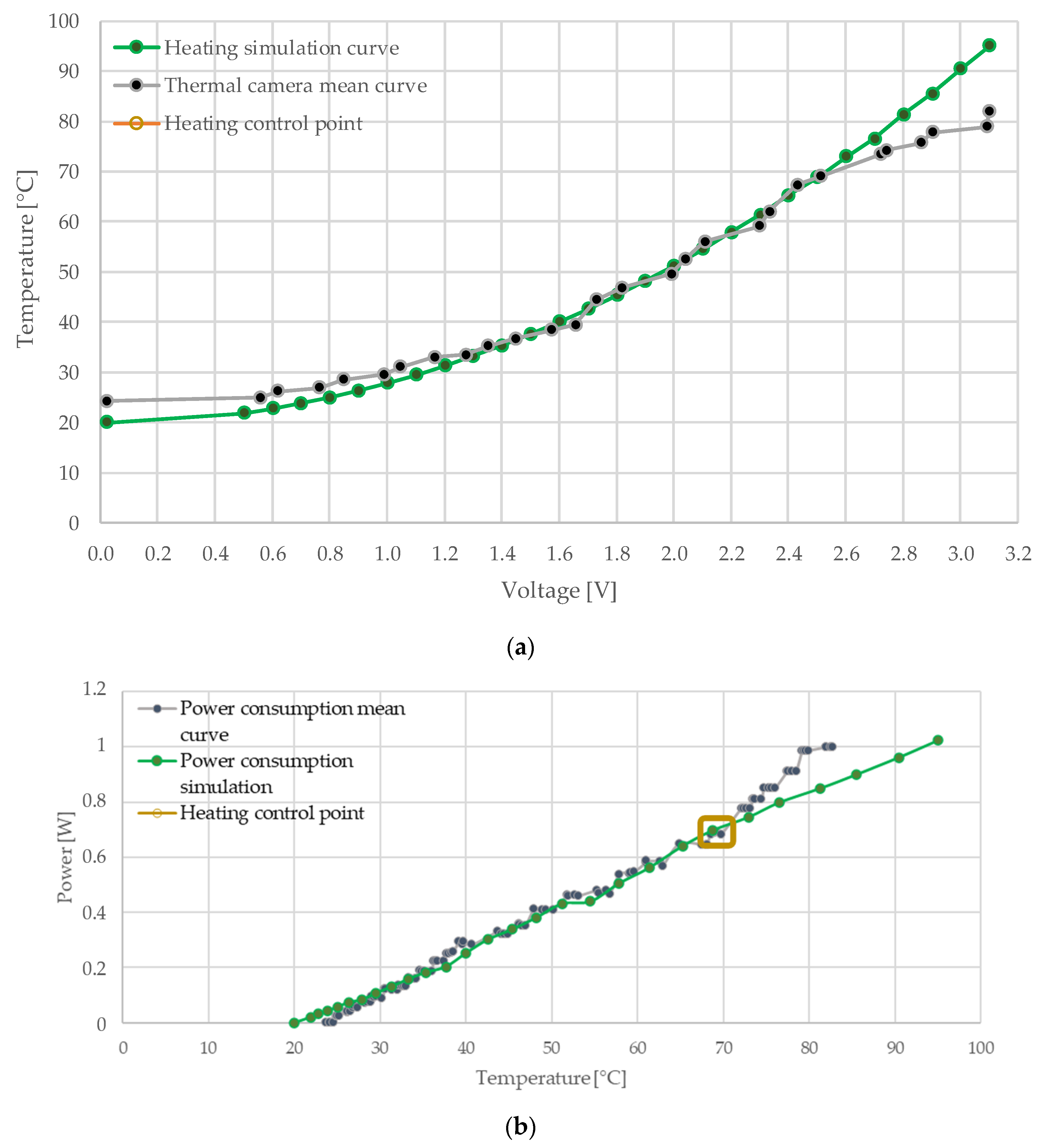
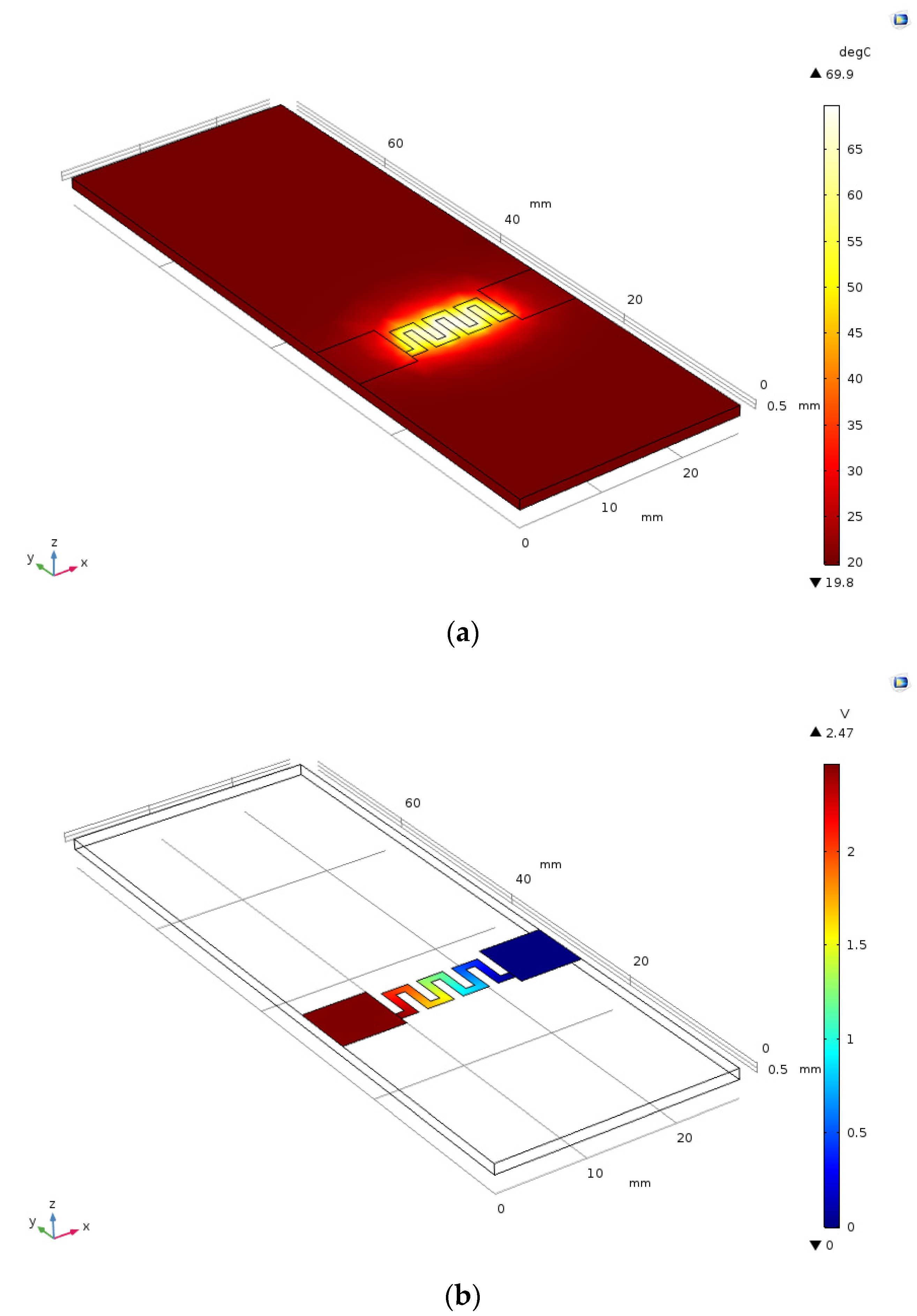
3.3. Heater Characterization Simulation
3.4. Heating Control Circuit
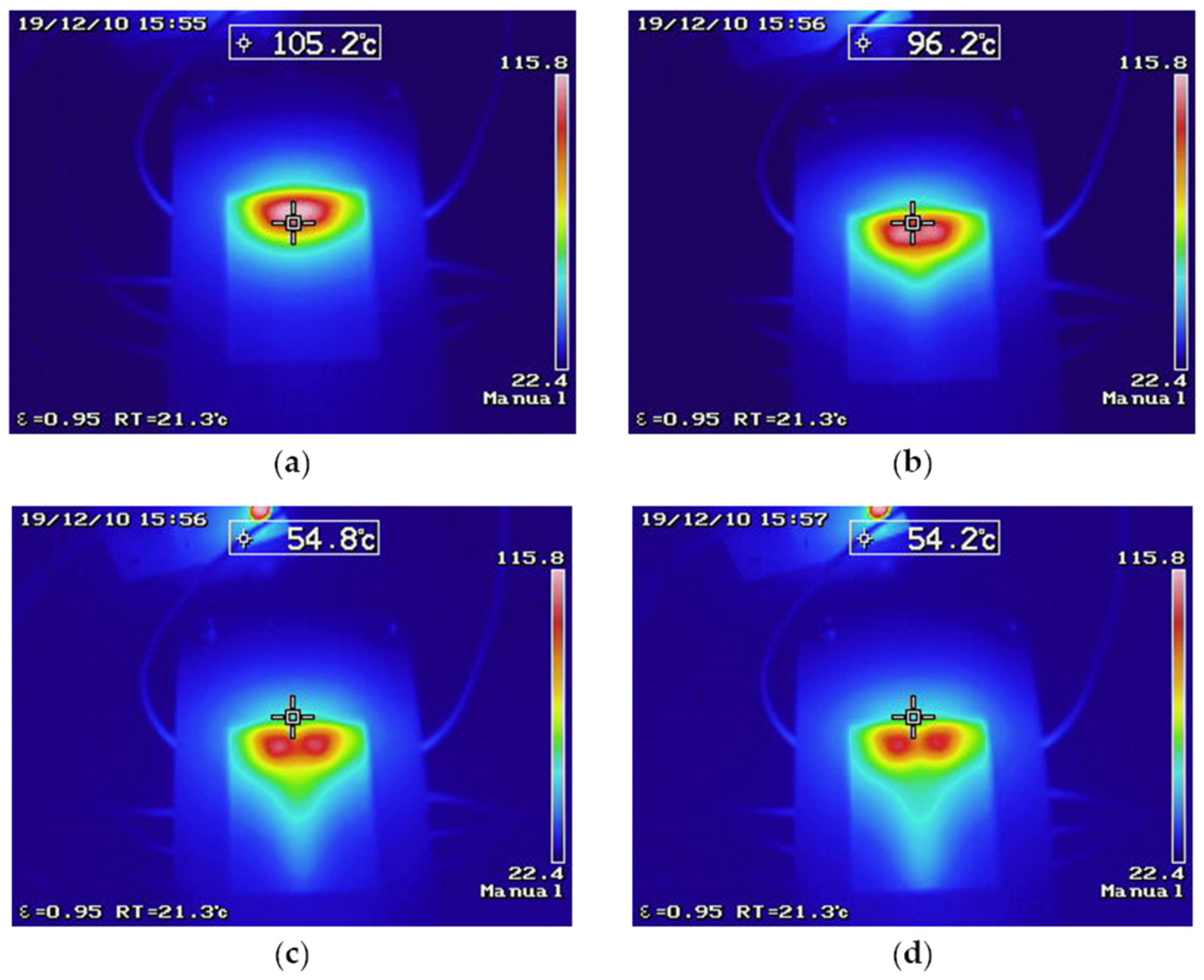
3.5. Thermal Characterization
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Khan, B.; Ahmed, S.; Kakkar, V. A Comparative Analysis of Thermal Flow Sensing in Biomedical Applications. Int. J. Biomed. Eng. Sci. 2016, 3, 1–7. [Google Scholar] [CrossRef]
- Das, S.; Kumar, R.; Singh, J.; Kumar, M. Fabrication of Microsensor for Detection of Low-Concentration Formaldehyde Gas in Formalin-Treated Fish. IEEE Trans. Electron. Devices 2020, 67, 5710–5716. [Google Scholar] [CrossRef]
- Jung, G.; Hong, Y.; Hong, S.; Jang, D.; Jeong, Y.; Shin, W.; Park, J.; Kim, D.; Jeong, C.B.; Kim, D.U.; et al. A low-power embedded poly-Si micro-heater for gas sensor platform based on a FET transducer and its application for NO2 sensing. Sens. Actuators B Chem. 2021, 334, 129642. [Google Scholar] [CrossRef]
- Paun, C.; Tomescu, R.; Cristea, D.; Ionescu, O.; Parvulescu, C. Design, fabrication and caracterization of a micro-heater for metasurface-based gas sensors. In Proceedings of the 2020 International Semiconductor Conference (CAS), Sinaia, Romania, 7–9 October 2020; pp. 31–34. [Google Scholar] [CrossRef]
- Keshavaditya, G.; Eranna, G.R.; Eranna, G. PRT embedded microheaters for optimum temperature distribution of air-suspended structures for gas sensor applications. IEEE Sens. J. 2015, 15, 4137–4140. [Google Scholar] [CrossRef]
- Bagga, S.; Akhtar, J.; Mishra, S. Preeti Fabrication of coplanar microheater platform for LPG sensing applications. Microsyst. Technol. 2020, 26, 731–738. [Google Scholar] [CrossRef]
- Ricci, P.P.; Gregory, O.J. Free-standing, thin-film sensors for the trace detection of explosives. Sci. Rep. 2021, 11, 2–11. [Google Scholar] [CrossRef]
- Rezania, A.; Rosendahl, L.A. Thermal effect of a thermoelectric generator on parallel microchannel heat sink. Energy 2012, 37, 220–227. [Google Scholar] [CrossRef]
- Hayakawa, T.; Sakuma, S.; Fukuhara, T.; Yokoyama, Y.; Arai, F. A Single Cell Extraction Chip Using Vibration-Induced Whirling Flow and a Thermo-Responsive Gel Pattern. Micromachines 2014, 5, 681–696. [Google Scholar] [CrossRef]
- Hernandez, C.A.; Beni, V.; Osma, J.F. Fully automated microsystem for unmediated electrochemical characterization, visualization and monitoring of bacteria on solid media; E. coli K-12: A case study. Biosensors 2019, 9, 131. [Google Scholar] [CrossRef] [Green Version]
- Velve-casquillas, G.; Le, M.; Piel, M.; Tran, P.T. Microfluidic tools for cell biological research. Nano Today 2010, 5, 28–47. [Google Scholar] [CrossRef] [Green Version]
- Jiang, L.; Wong, M.; Zohar, Y. Unsteady characteristics of a thermal microsystem. Sens. Actuators A Phys. 2000, 82, 108–113. [Google Scholar] [CrossRef]
- Lagally, E.T.; Emrich, C.A.; Mathies, R.A. Fully integrated PCR-capillary electrophoresis microsystem for DNA analysis. Lab Chip 2001, 1, 102–107. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Li, L.; Mason, A.J. Thermal Control Microsystem for Protein Characterization and Sensing. In Proceedings of the 2009 IEEE Biomedical Circuits and Systems Conference, Beijing, China, 26–28 November 2009; pp. 277–280. [Google Scholar]
- Tvarogek, V.; Tienb, H.T.; Novotny, I. Thin-film microsystem applicable in (bio) chemical sensors. Sens. Actuators B Chem. 1994, 19, 597–602. [Google Scholar] [CrossRef]
- Bermudez, J.F.; Saldarriaga, J.F.; Osma, J.F. Portable and low-cost respirometric microsystem for the static and dynamic respirometry monitoring of compost. Sensors 2019, 19, 4132. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wojtas, N.; Hierold, C. Microfluidic heat transfer systems optimized for thermoelectric heat exchangers. In Proceedings of the 2013 Transducers & Eurosensors XXVII: The 17th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS & EUROSENSORS XXVII), Barcelona, Spain, 16–20 June 2013; pp. 1368–1371. [Google Scholar] [CrossRef]
- Pawlak, R.; Lebioda, M. Electrical and thermal properties of heater-sensor microsystems patterned in TCO films for wide-range temperature applications from 15 K to 350 K. Sensors 2018, 18, 1831. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Je, J.; Lee, J. Design, Fabrication, and Characterization of Liquid Metal Microheaters. Microelectromech. Syst. 2014, 23, 1156–1163. [Google Scholar]
- Scorzoni, A.; Caputo, D.; Petrucci, G.; Placidi, P.; Zampolli, S.; de Cesare, G.; Tavernelli, M.; Nascetti, A. Design and experimental characterization of thin film heaters on glass substrate for Lab-on-Chip applications. Sens. Actuators A Phys. 2015, 229, 203–210. [Google Scholar] [CrossRef]
- Byers, K.M.; Lin, L.K.; Moehling, T.J.; Stanciu, L.; Linnes, J.C. Versatile printed microheaters to enable low-power thermal control in paper diagnostics. Analyst 2020, 145, 184–196. [Google Scholar] [CrossRef] [Green Version]
- Tiwari, S.K.; Bhat, S.; Mahato, K.K. Design and fabrication of screen printed microheater. Microsyst. Technol. 2018, 24, 3273–3281. [Google Scholar] [CrossRef]
- Gregorini, M.; Grass, R.N.; Stark, W.J. One-Step Photolithographic Surface Patterning of Nanometer-Thick Gold Surfaces by Using a Commercial DLP Projector and the Fabrication of a Microheater. Ind. Eng. Chem. Res. 2020, 59, 12048–12055. [Google Scholar] [CrossRef]
- Garraud, A.; Basrour, S.; Peyrade, D. Fabrication of a Multiple Heater-Sensor Platform for Cell Temperature Monitoring. In Proceedings of the 2020 Symposium on Design, Test, Integration & Packaging of MEMS and MOEMS (DTIP), Lyon, France, 15–26 June 2020; pp. 20–23. [Google Scholar] [CrossRef]
- Nieto, D.; McGlynn, P.; de la Fuente, M.; Lopez-Lopez, R.; O’connor, G.M. Laser microfabrication of a microheater chip for cell culture outside a cell incubator. Colloids Surf. B Biointerfaces 2017, 154, 263–269. [Google Scholar] [CrossRef]
- Aranguren, A.; Torres, C.E.; Muñoz-Camargo, C.; Osma, J.F.; Cruz, J.C. Synthesis of Nanoscale Liposomes via Low-Cost Microfluidic Systems. Micromachines 2020, 11, 1050. [Google Scholar] [CrossRef]
- Campaña, A.L.; Sotelo, D.C.; Oliva, H.A.; Aranguren, A.; Ornelas-Soto, N.; Cruz, J.C.; Osma, J.F. Fabrication and characterization of a low-cost microfluidic system for the manufacture of alginate-lacasse microcapsules. Polymers 2020, 12, 1158. [Google Scholar] [CrossRef] [PubMed]
- Perez, M.A. Instrumentación Electrónica; Paraninfo Ediciones: Madrid, Spain, 2014; pp. 7–12. ISBN 8428337020. [Google Scholar]
- Khabari, A.; Zenouzi, M.; Connor, T.O.; Rodas, A. Natural and Forced Convective Heat Transfer Analysis of Nanostructured Surface. In Proceedings of the World Congress on Engineering, London, UK, 2–4 July 2014; Volume I, pp. 7–9. [Google Scholar]
- Serway, R.A.; Jewett, J.W., Jr. Physics for Scientists and Engineers with Modern Physics, 9th ed.; Brooks/Cole: Boston, MA, USA, 2014; ISBN 9781133954057. [Google Scholar]
- Cadar, S. Simulation & Modelling of a Tungsten Filament with COMSOL for Electrothermal Process. In Proceedings of the 2016 IEEE 22nd International Symposium for Design and Technology in Electronic Packaging (SIITME), Oradea, Romania, 20–23 October 2016; pp. 165–170. [Google Scholar]
- Lacy, F. Developing a theoretical relationship between electrical resistivity, temperature, and film thickness for conductors. Nanoscale Res. Lett. 2011, 6, 263501. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, Y.; Du, X.; Li, Y.; Tai, H.; Su, Y. Optimization of temperature uniformity of a serpentine thin film heater by a two-dimensional approach. Microsyst. Technol. 2019, 25, 69–82. [Google Scholar] [CrossRef]
- Mahdi, M. Ultra-low power MEMS micro-heater device. Microsyst. Technol. 2021, 27, 2913–2917. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value |
|---|---|
| Initial air temperature (°C) | 20 |
| Copper electrical conductivity (S/m) | 5.96 × 107 |
| Chrome electrical conductivity (S/m) | 7.9 × 107 |
| Silica glass electrical conductivity (S/m) | 1 × 10−14 |
| Copper thermal conductivity (W/m·K) | 400 |
| Chrome thermal conductivity (W/m·K) | 93.7 |
| Silica glass thermal conductivity (W/m·K) | 1.38 |
| Air heat transfer film coefficient (W/(m2·K)) [29] | 20.45 |
| Copper layer thickness (nm) | 100 |
| Chrome layer thickness (nm) | 15 |
| Item | Copper | Chrome | Heater |
|---|---|---|---|
| Height (nm) | 100 | 15 | 115 |
| Resistivity (Ω⋅mm2/m) [30] | 0.017 | 0.125 | - |
| Pad area (mm2) | 0.00125 | 0.0001875 | - |
| Pad length (mm) | 7.43 | 7.43 | - |
| Heater length (mm) | 31 | 31 | - |
| Path resistance (Ω) | 0.101 | 4.9538 | 0.0989 |
| Heater resistance (Ω) | 5.301 | 38.75 | 4.66 |
| Heater resultant resistance (Ω) | 5.402 | 43.73 | 4.80 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tovar, S.; Hernández, C.A.; Osma, J.F. Design, Simulation, and Fabrication of a Copper–Chrome-Based Glass Heater Integrated into a PMMA Microfluidic System. Micromachines 2021, 12, 1067. https://doi.org/10.3390/mi12091067
Tovar S, Hernández CA, Osma JF. Design, Simulation, and Fabrication of a Copper–Chrome-Based Glass Heater Integrated into a PMMA Microfluidic System. Micromachines. 2021; 12(9):1067. https://doi.org/10.3390/mi12091067
Chicago/Turabian StyleTovar, Santiago, Cesar A. Hernández, and Johann F. Osma. 2021. "Design, Simulation, and Fabrication of a Copper–Chrome-Based Glass Heater Integrated into a PMMA Microfluidic System" Micromachines 12, no. 9: 1067. https://doi.org/10.3390/mi12091067
APA StyleTovar, S., Hernández, C. A., & Osma, J. F. (2021). Design, Simulation, and Fabrication of a Copper–Chrome-Based Glass Heater Integrated into a PMMA Microfluidic System. Micromachines, 12(9), 1067. https://doi.org/10.3390/mi12091067