
Electromagnetic Vibration Energy Harvester with Tunable Resonance Frequency Based on Stress Modulation of Flexible Springs





Abstract
:1. Introduction
2. System Design
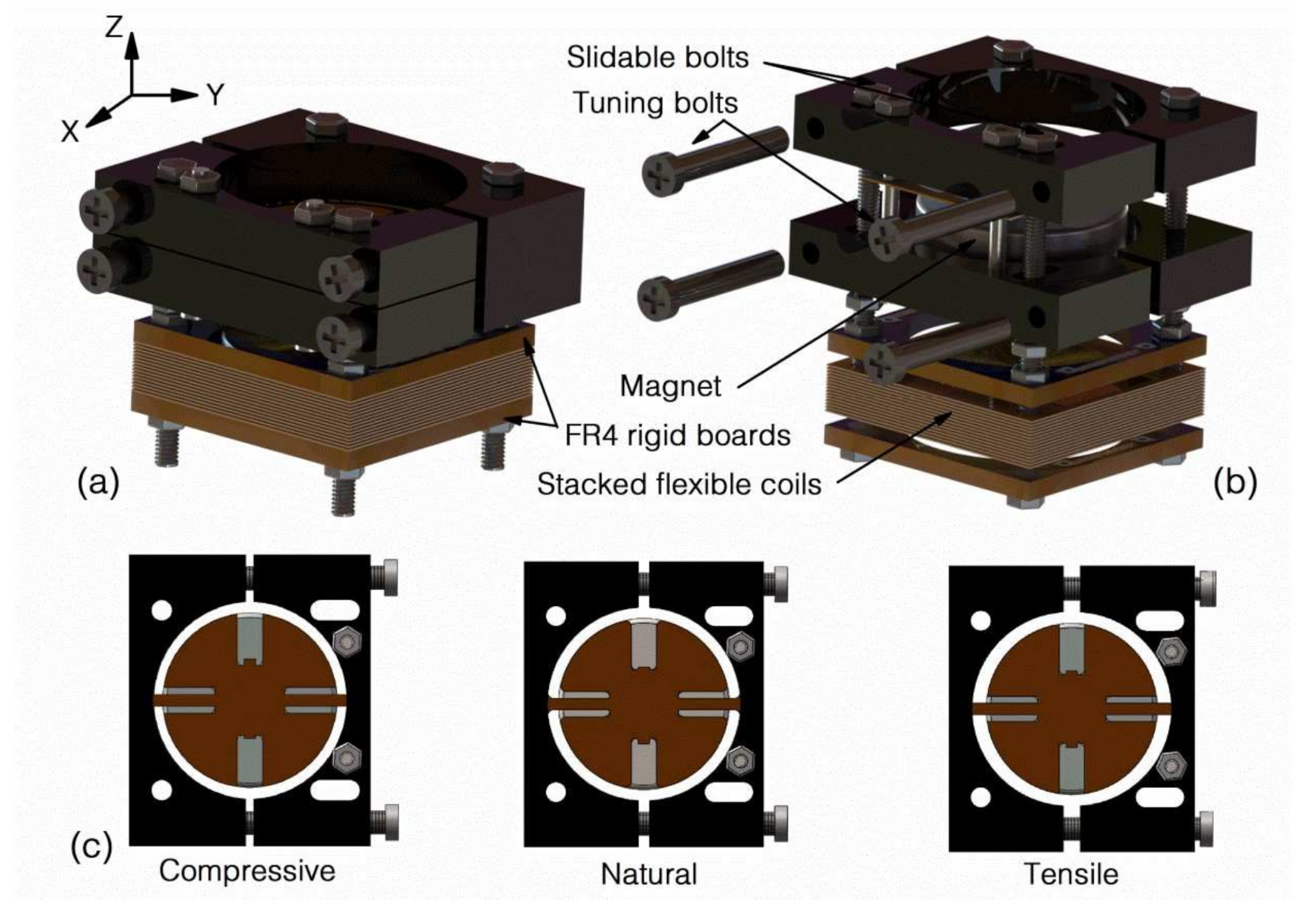
2.1. Concept of the Device
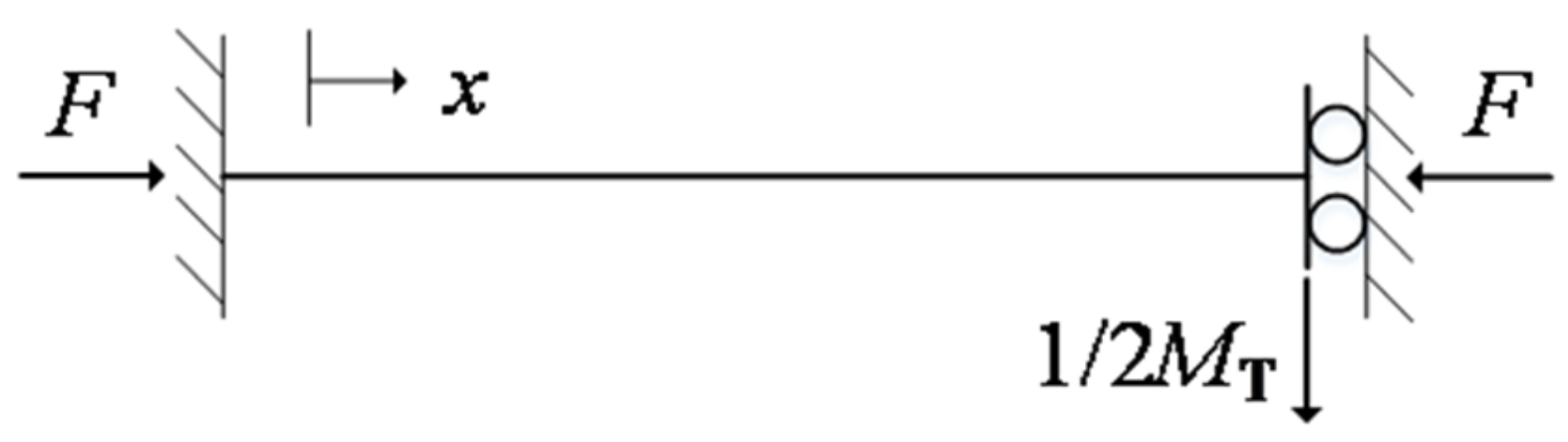
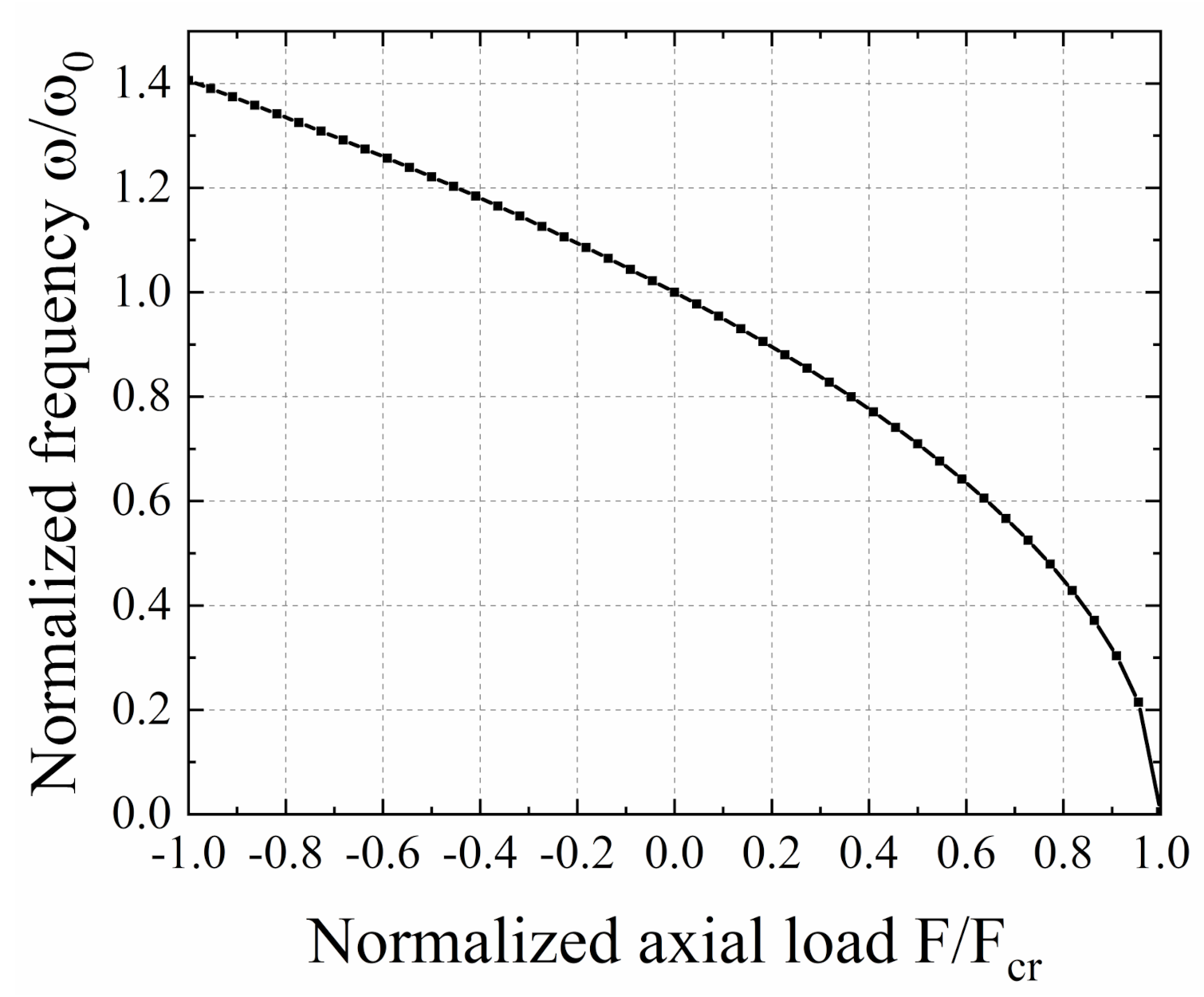
2.2. Analytical Modeling
2.3. Finite Element Method (FEM) Modeling
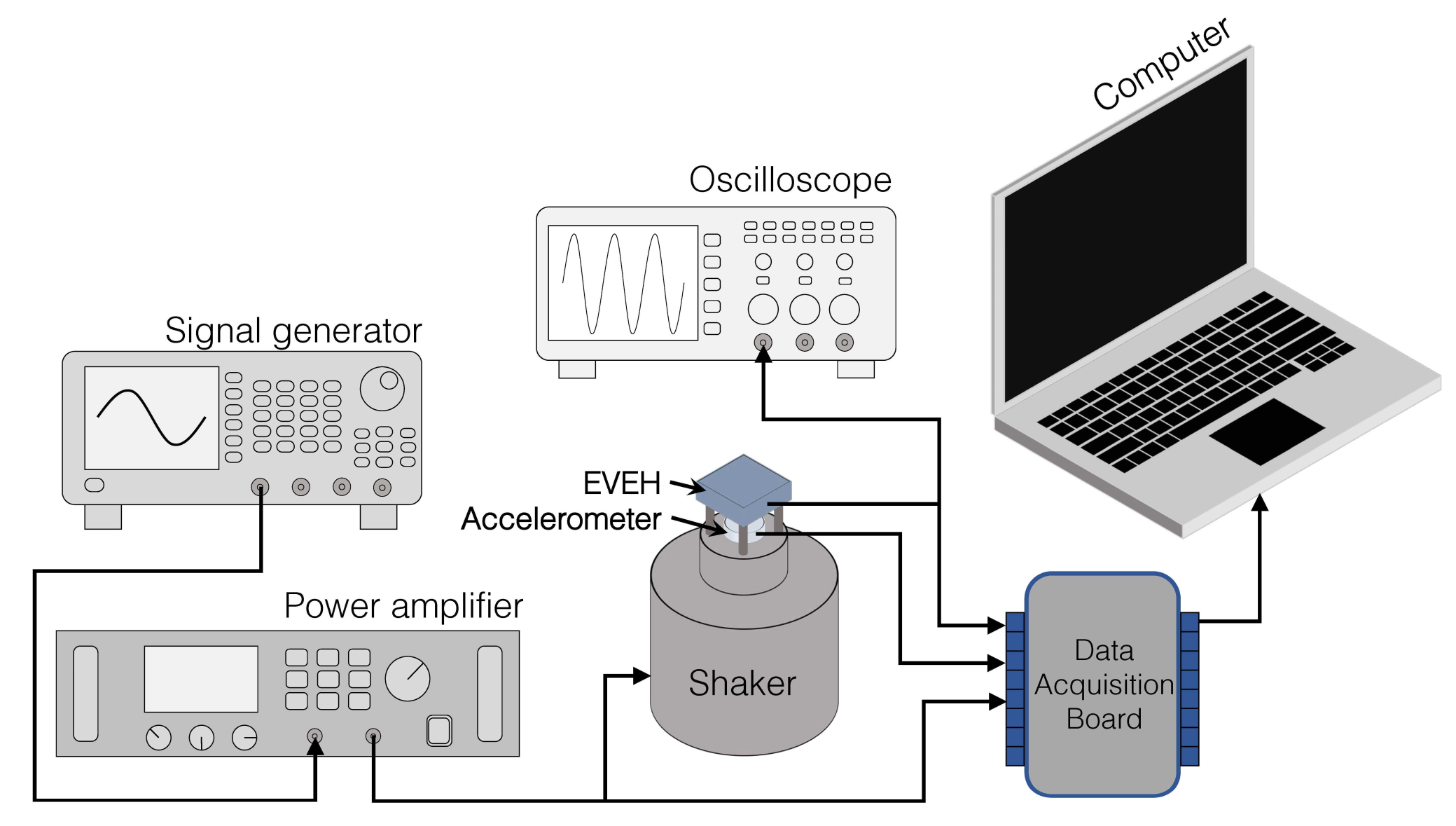
3. Experimental
4. Results and Discussions
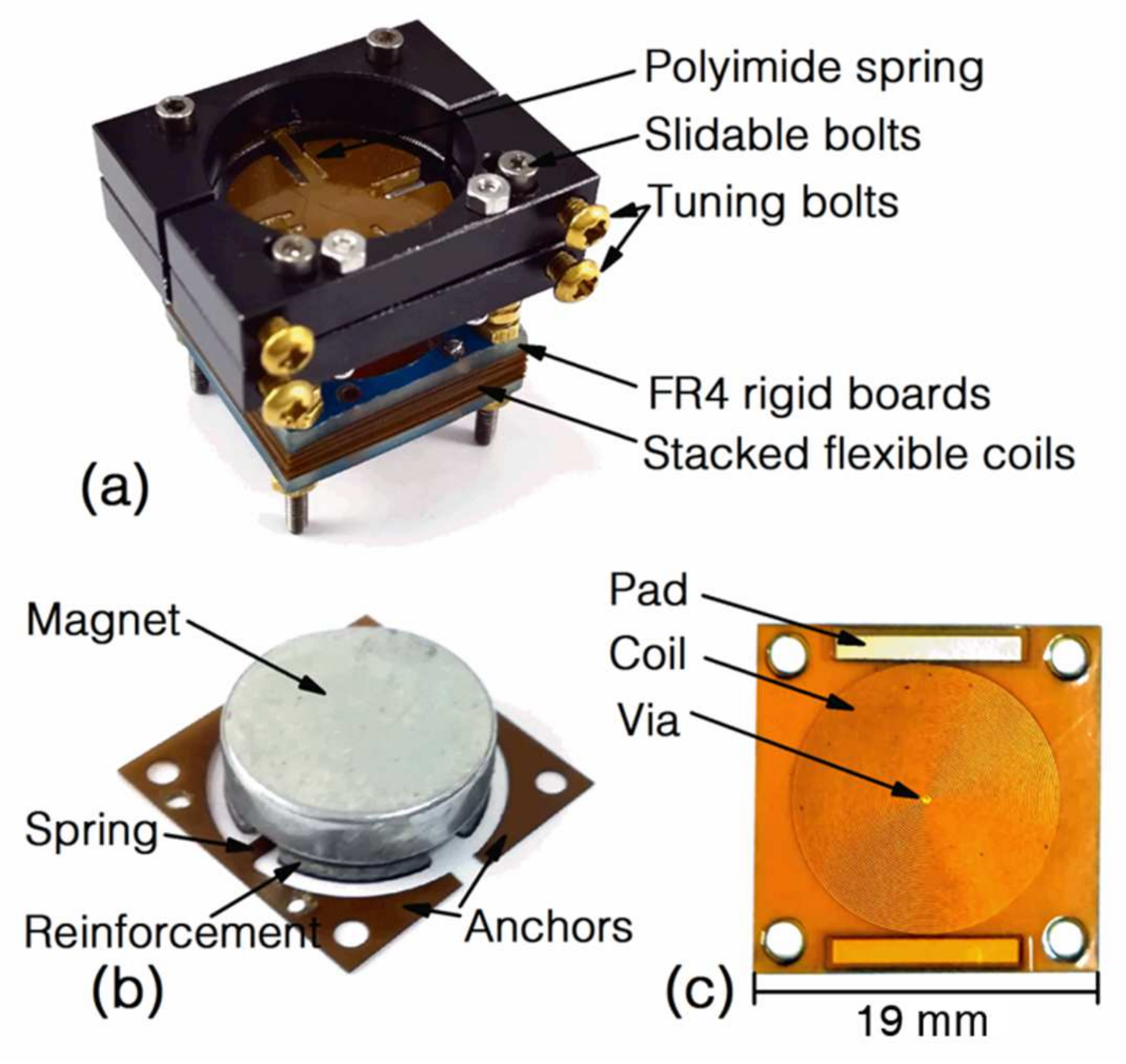
4.1. Manufactured EVEH Device
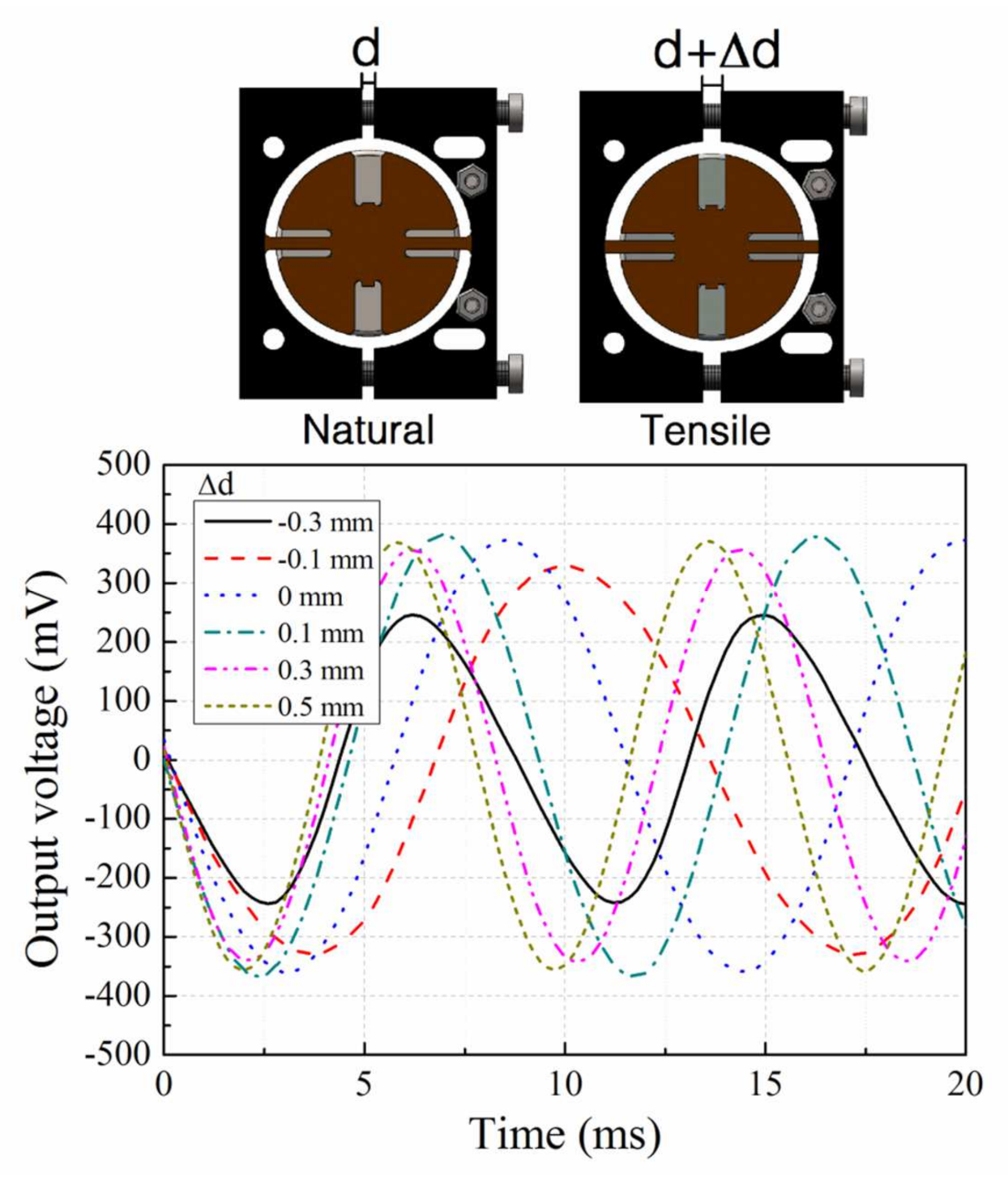
4.2. Time Domain Response
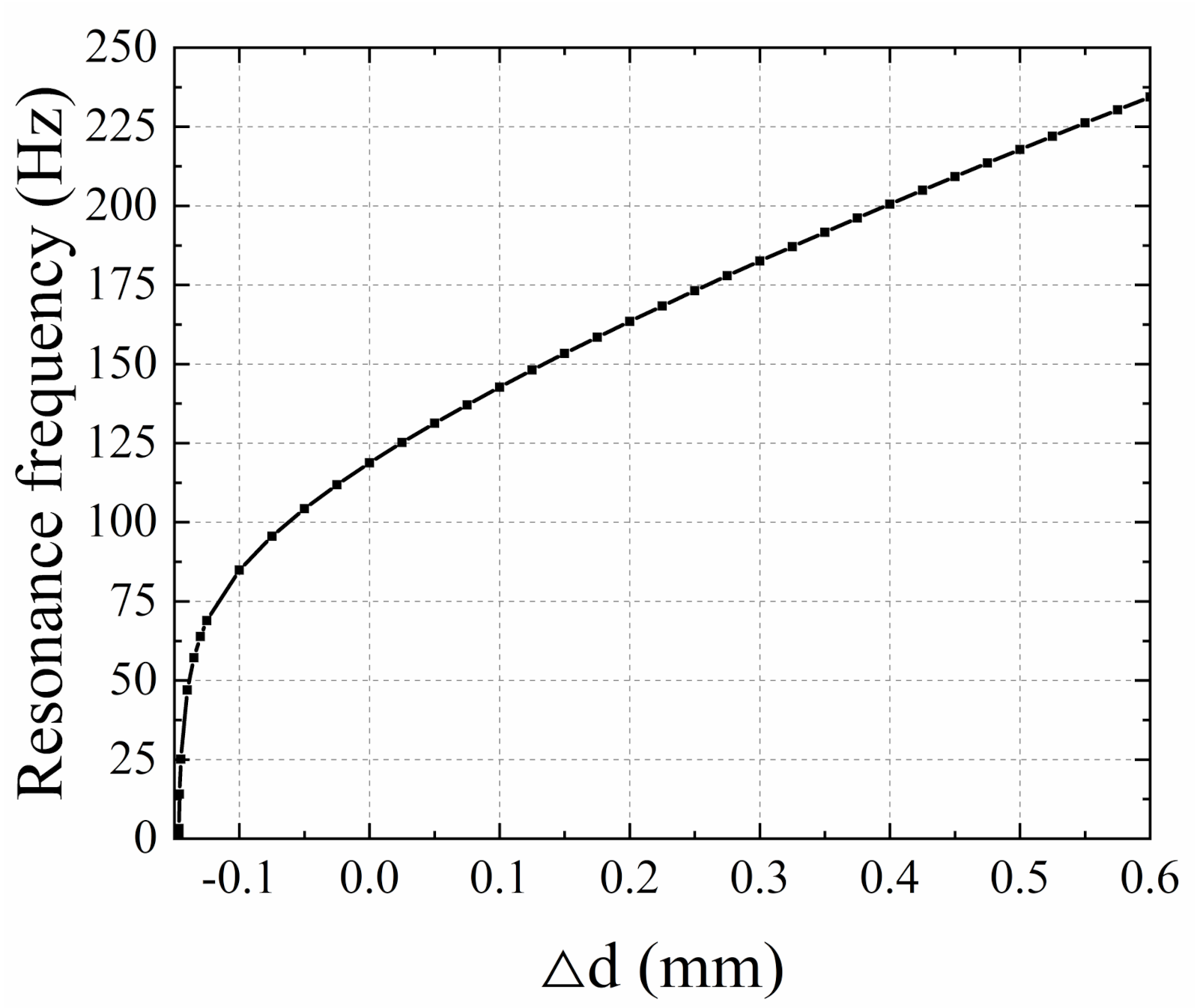
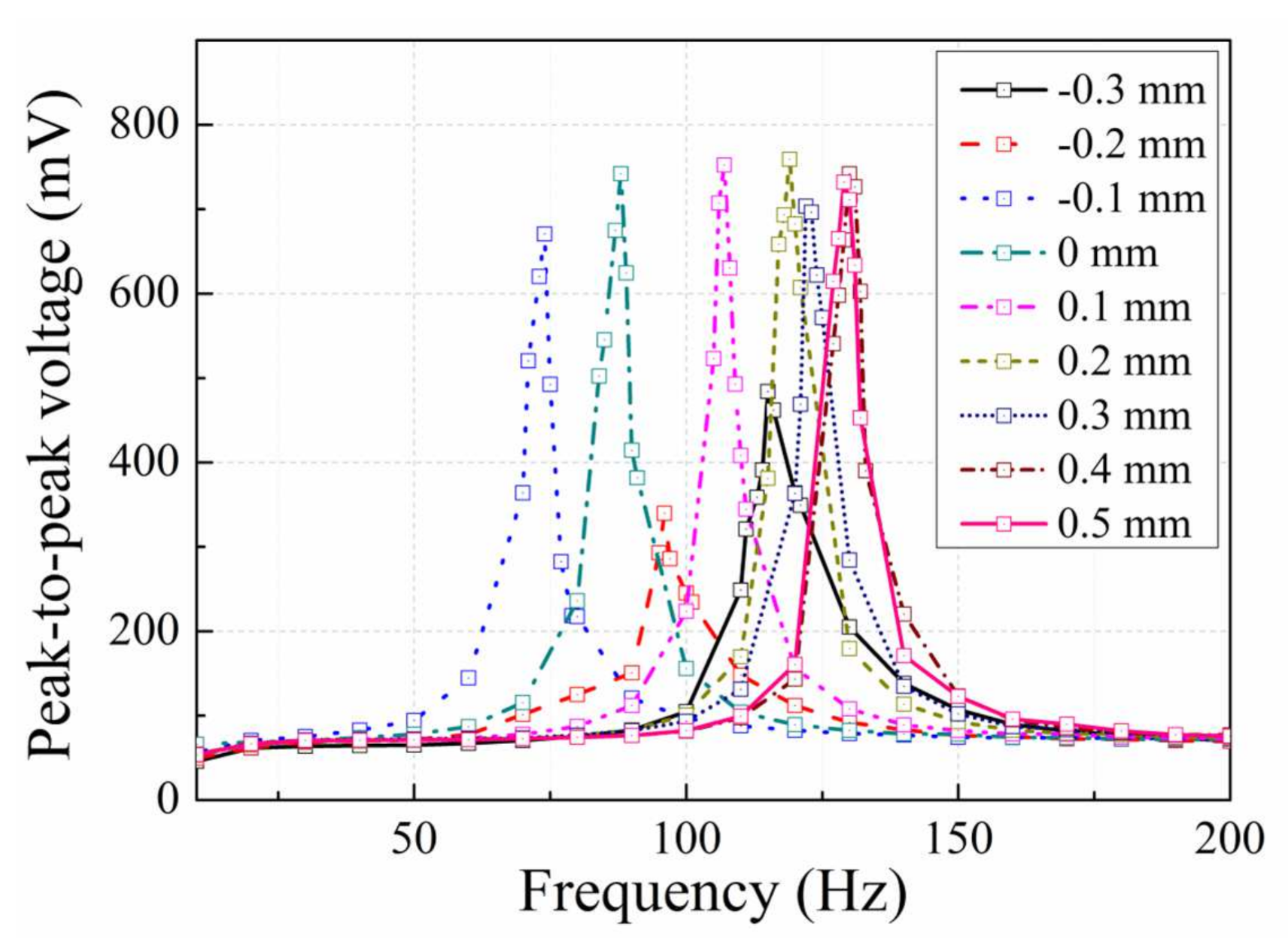
4.3. Frequency Tuning of the Device
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Priya, S.; Inman, D.J. Energy Harvesting Technologies; Springer Science+Business Media, LLC: New York, NY, USA, 2008; p. 524. [Google Scholar]
- Tao, K.; Wu, J.; Tang, L.; Xia, X.; Lye, S.W.; Miao, J.; Hu, X. A novel two-degree-of-freedom MEMS electromagnetic vibration energy harvester. J. Micromech. Microeng. 2016, 26, 035020. [Google Scholar] [CrossRef]
- Tang, L.; Yang, Y.; Soh, C. Toward Broadband Vibration-based Energy Harvesting. J. Intell. Mater. Syst. Struct. 2010, 21, 1867–1897. [Google Scholar] [CrossRef]
- Roundy, S.; Leland, E.S.; Baker, J.; Carleton, E.; Reilly, E.; Lai, E.; Otis, B.; Rabaey, J.M.; Wright, P.K.; Sundararajan, V. Improving power output for vibration-based energy scavengers. IEEE Pervasive Comput. 2005, 4, 28–36. [Google Scholar] [CrossRef]
- Mitcheson, P.D.; Toh, T.T.; Wong, K.H.; Burrow, S.G.; Holmes, A.S. Tuning the Resonant Frequency and Damping of an Electromagnetic Energy Harvester Using Power Electronics. IEEE Trans. Circuits Syst. II: Express Briefs 2011, 58, 792–796. [Google Scholar] [CrossRef] [Green Version]
- Adams, S.G.; Bertsch, F.M.; Shaw, K.A.; Hartwell, P.G.; Moon, F.C.; MacDonald, N.C. Capacitance based tunable resonators. J. Micromech. Microeng. 1998, 8, 15. [Google Scholar] [CrossRef]
- Roundy, S.; Zhang, Y. Toward self-tuning adaptive vibration-based microgenerators. Smart Mater. Nano- Micro-Smart Syst. 2005, 5649, 12. [Google Scholar]
- Ching, N.N.H.; Wong, H.Y.; Li, W.J.; Leong, P.H.W.; Wen, Z. A laser-micromachined multi-modal resonating power transducer for wireless sensing systems. Sens. Actuator A-Phys. 2002, 97–98, 685–690. [Google Scholar] [CrossRef]
- Yang, B. Electromagnetic energy harvesting from vibrations of multiple frequencies. J. Micromech. Microeng. 2009, 19, 035001. [Google Scholar] [CrossRef]
- Chen, J.; Chen, D.; Yuan, T.; Chen, X. A multi-frequency sandwich type electromagnetic vibration energy harvester. Appl. Phys. Lett. 2012, 100, 213509. [Google Scholar] [CrossRef]
- Liu, H.; Soon, B.W.; Wang, N.; Tay, C.J.; Quan, C.; Lee, C. Feasibility study of a 3D vibration-driven electromagnetic MEMS energy harvester with multiple vibration modes. J. Micromech. Microeng. 2012, 22, 125020. [Google Scholar] [CrossRef]
- El-Hebeary, M.M.R.; Arafa, M.H.; Megahed, S.M. Modeling and experimental verification of multi-modal vibration energy harvesting from plate structures. Sens. Actuator A-Phys. 2013, 193, 35–47. [Google Scholar] [CrossRef]
- Sari, I.; Balkan, T.; Kulah, H. An electromagnetic micro power generator for wideband environmental vibrations. Sens. Actuator A-Phys. 2008, 145–146, 405–413. [Google Scholar] [CrossRef]
- Soliman, M.S.M.; Abdel-Rahman, E.M.; El-Saadany, E.F.; Mansour, R.R. A wideband vibration-based energy harvester. J. Micromech. Microeng. 2008, 18, 115021. [Google Scholar] [CrossRef]
- Nguyen, D.S.; Halvorsen, E.; Jensen, G.U.; Vogl, A. Fabrication and characterization of a wideband MEMS energy harvester utilizing nonlinear springs. J. Micromech. Microeng. 2010, 20, 125009. [Google Scholar] [CrossRef]
- Dhiman, M.; Andreas, A.; Saibal, R. A nonlinear stretching based electromagnetic energy harvester on FR4 for wideband operation. Smart Mater. Struct. 2015, 24, 015013. [Google Scholar]
- Li, Y.; Cao, Q.; Zhang, W.; Zhang, Y.; Cao, J. A miniaturized electromagnetic energy harvester with volt-level output based on stacked flexible coils. Smart Mater. Struct. 2018, 27, 115040. [Google Scholar]
- Shaker, F.J. Effect of axial load on mode shapes and frequencies of beams; NASA Tech. Note: Washington, DC, USA, 1975. [Google Scholar]
- Holst, G.L.; Teichert, G.H.; Jensen, B.D. Modeling and Experiments of Buckling Modes and Deflection of Fixed-Guided Beams in Compliant Mechanisms. J. Mech. Des. 2011, 133, 051002. [Google Scholar] [CrossRef]
- Garcia, I.A.; Zhu, D.; Tudor, J.; Beeby, S. Autonomous Tunable Energy Harvester. In Proceedings of the Power MEMS 2009, Washington, DC, USA, 1–4 December 2009. [Google Scholar]
- Bouwstra, S.; Geijselaers, B. On the resonance frequencies of microbridges. In Proceedings of the TRANSDUCERS’91: 1991 International Conference on Solid-State Sensors and Actuators. Digest of Technical Papers, San Francisco, CA, USA, 24–27 June 1991. [Google Scholar]
- Podder, P.; Amann, A.; Roy, S. A bistable electromagnetic micro-power generator using FR4-based folded arm cantilever. Sens. Actuator A-Phys. 2015, 227, 39–47. [Google Scholar]
- Xing, X.; Lou, J.; Yang, G.M.; Obi, O.; Driscoll, C.; Sun, N.X. Wideband vibration energy harvester with high permeability magnetic material. Appl. Phys. Lett. 2009, 95, 134103. [Google Scholar] [CrossRef]
- Chen, Y.; Pollock, T.E.; Salehian, A. Analysis of compliance effects on power generation of a nonlinear electromagnetic energy harvesting unit; theory and experiment. Smart Mater. Struct. 2013, 22, 94027. [Google Scholar] [CrossRef]
- Podder, P.; Constantinou, P.; Amann, A.; Roy, S. Frequency adjustable MEMS vibration energy harvester. J. Phys. Conf. Ser. 2016, 757, 12037. [Google Scholar] [CrossRef] [Green Version]
- Dehghan Niri, E.; Salamone, S. A passively tunable mechanism for a dual bimorph energy harvester with variable tip stiffness and axial load. Smart Mater. Struct. 2012, 21, 125025. [Google Scholar] [CrossRef]
- Eichhorn, C.; Goldschmidtboeing, F.; Woias, P. Bidirectional frequency tuning of a piezoelectric energy converter based on a cantilever beam. J. Micromech. Microeng. 2009, 19, 094006. [Google Scholar] [CrossRef]
- Leland, E.S.; Wright, P.K. Resonance tuning of piezoelectric vibration energy scavenging generators using compressive axial preload. Smart Mater. Struct. 2006, 15, 1413–1420. [Google Scholar] [CrossRef]
- Yildirim, T.; Ghayesh, M.H.; Li, W.; Alici, G. A Nonlinearly Broadband Tuneable Energy Harvester. J. Dyn. Syst. Meas. Control-Trans. ASME 2017, 139, 011008. [Google Scholar] [CrossRef]
- Ambrożkiewicz, B.; Litak, G.; Wolszczak, P. Modelling of Electromagnetic Energy Harvester with Rotational Pendulum Using Mechanical Vibrations to Scavenge Electrical Energy. Appl. Sci. 2020, 10, 671. [Google Scholar] [CrossRef] [Green Version]
- Foong, F.M.; Thein, C.K.; Ooi, B.L.; Yurchenko, D. Increased power output of an electromagnetic vibration energy harvester through anti-phase resonance. Mech. Syst. Signal Process. 2019, 116, 129–145. [Google Scholar] [CrossRef]
- Tao, K.; Chen, Z.; Yi, H.; Zhang, R.; Shen, Q.; Wu, J.; Tang, L.; Fan, K.; Fu, Y.; Miao, J.; et al. Hierarchical Honeycomb-Structured Electret/Triboelectric Nanogenerator for Biomechanical and Morphing Wing Energy Harvesting. Nano-Micro Lett. 2021, 13, 1–16. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Value |
|---|---|---|
| E | Young’s modulus | 3.2 × 109 Pa |
| I | Area moment of inertia, I = bh3/12 | 3.4 × 10−16 m4 |
| l | Length of the spring | 7.0 × 10−3 m |
| b | Width of the spring | 1.0 × 10−3 m |
| h | Thickness of the spring | 1.6 × 10−4 m |
| ρ | Weight per length | 2.2 × 10−4 kg/m |
| MT | Weight of the tip mass | 5.5 × 10−3 kg |
| Fcr | Critical buckling load, Fcr = π2EI/l2 | 2.2 × 10−1 N |
| Reference | Technology | Size/cm3 | Absolute Frequency Range/Hz | Relative Frequency Range/% | |
|---|---|---|---|---|---|
| Band Broadening | [8] | Multi-mode device | 1 | 71–74 105–107 111–114 | 4 2 3 |
| [9] | Multi-mode device | 3.18 | 345–395 900–980 1130–1230 | 14 9 8 | |
| [13] | Multi-frequency device, 40 cantilevers | 1.40 | 3500–4500 | 25 | |
| [13] | Multi-frequency device, 35 cantilevers | 1.40 | 4200–5000 | 17 | |
| [14] | Nonlinear device | 9 | 94.1–98.9 | 5 | |
| [22] | Bistable device | 2.97 | 30–35 | 15 | |
| [23] | Magnetostatic coupling device | 68.9 | 45.5–55.5 | 19 | |
| Frequency Tuning | [24] | Combination of linear springs and magnetic nonlinearity | 61 | 2–7 | 110 |
| [20] | Magnetic coupling adjustment of the spring stiffness | 1.12 | 64–78 | 22 | |
| [25] | Magnetic coupling adjustment of the spring stiffness | 1.8 | 409–516 | 25 | |
| [26] | Stress modulation of piezoelectric springs | 1700 | 6–62 | 191 | |
| [27] | Stress modulation of piezoelectric cantilever | 54 | 292–380 440–460 | 22 4 | |
| [28] | Stress modulation of a piezoelectric spring | 60 | 200–250 | 24 | |
| [29] | Stress modulation of an aluminum spring | 280 | 16–46 | 65 | |
| This work | Stress modulation of polymeric springs | 9.95 | 74–130 | 64 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Zhou, C.; Cao, Q.; Wang, X.; Qiao, D.; Tao, K. Electromagnetic Vibration Energy Harvester with Tunable Resonance Frequency Based on Stress Modulation of Flexible Springs. Micromachines 2021, 12, 1130. https://doi.org/10.3390/mi12091130
Li Y, Zhou C, Cao Q, Wang X, Qiao D, Tao K. Electromagnetic Vibration Energy Harvester with Tunable Resonance Frequency Based on Stress Modulation of Flexible Springs. Micromachines. 2021; 12(9):1130. https://doi.org/10.3390/mi12091130
Chicago/Turabian StyleLi, Yunjia, Chenyuan Zhou, Qi Cao, Xinyi Wang, Dayong Qiao, and Kai Tao. 2021. "Electromagnetic Vibration Energy Harvester with Tunable Resonance Frequency Based on Stress Modulation of Flexible Springs" Micromachines 12, no. 9: 1130. https://doi.org/10.3390/mi12091130
APA StyleLi, Y., Zhou, C., Cao, Q., Wang, X., Qiao, D., & Tao, K. (2021). Electromagnetic Vibration Energy Harvester with Tunable Resonance Frequency Based on Stress Modulation of Flexible Springs. Micromachines, 12(9), 1130. https://doi.org/10.3390/mi12091130