2. Concept and Method of Estimation
In this section, the concept at the basis of the developed measurement system is explained.
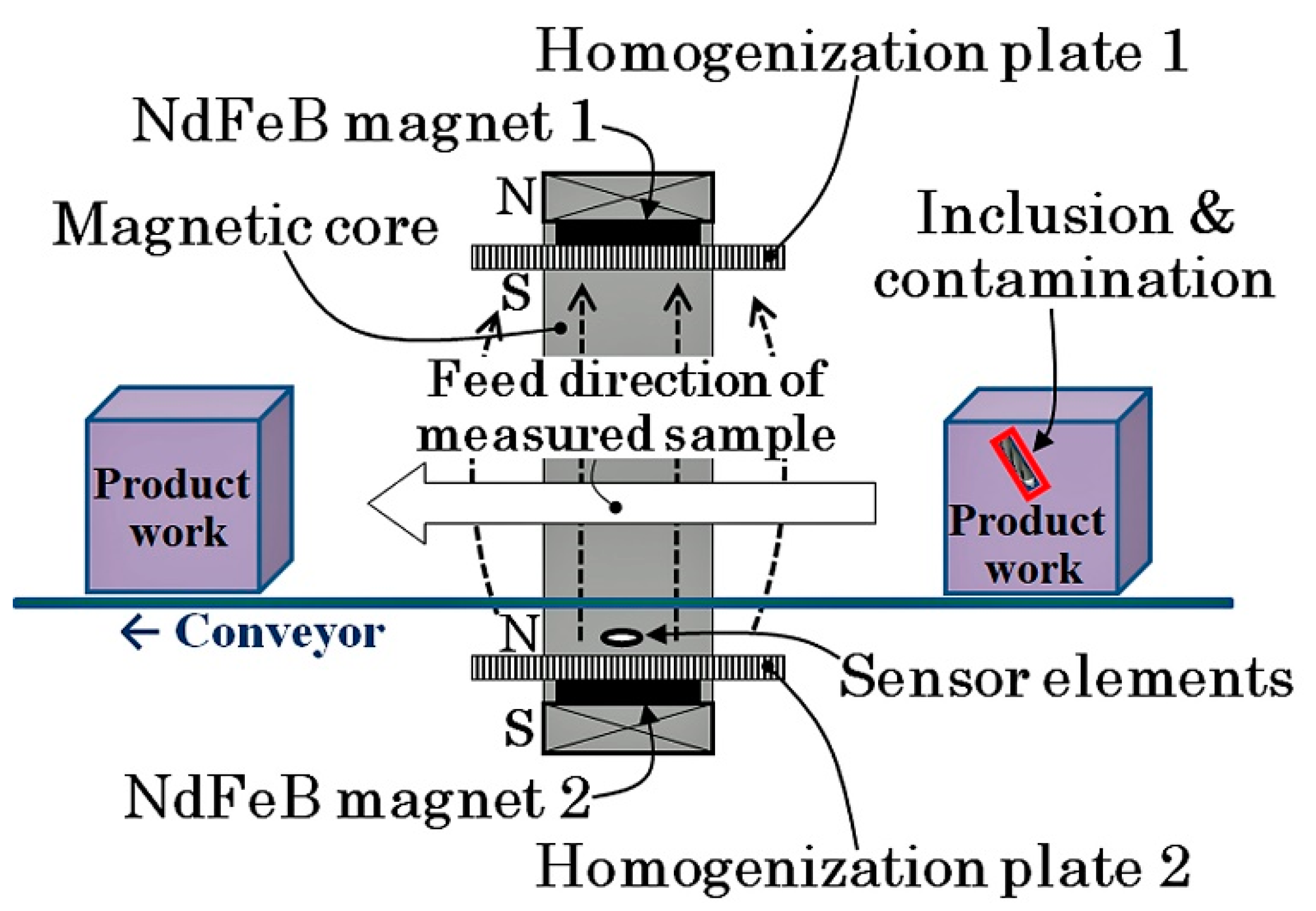
Figure 1 shows a schematic explanation of the concept at the basis of the measurement system. The system was set on a feeding conveyer of workpiece and could nondestructively detect the presence of contaminants and estimate their position and size. This proposed system can realize a full inspection of a non-magnetic metal workpiece for the detection of magnetic contaminant chipping.
Figure 2 shows a picture of the prototype measurement system, which has a magnetic structure applying a certain vertical magnetic field to the measurement area and a thin-film magneto-impedance sensor array that, with magnetization, simultaneously detects magnetic chipping in a bulk workpiece. The system is installed with belt conveyer for feeding the measurement workpiece.
In this study, a method of estimating the chipping position and size inside the workpiece is proposed, which is suitable for the layout of the measurement system shown in
Figure 2.
Figure 3,
Figure 4 and
Figure 5 report schematic explanations of the structure of position estimation system proposed in this article.
Figure 3 shows a perspective view.
Figure 4 shows a side view, and
Figure 5 shows a top view. In these figures, a homogenized vertical magnetic field was established between two soft magnetic plates having a high saturation magnetization. High-sensitivity thin-film MI sensors were placed on the surface of the homogenization plate, and the workpiece, including a magnetic small chipping, was fed transversally along the X-direction. In this system, the MI sensors were single-axis, and the sensing direction was placed parallel to the X-direction. The conveyer fed the workpiece along the X-direction at a constant feeding speed. In this system with limited dimensions, the 3-dimensional position of magnetic chipping running through the feeding line could be estimated analytically, which was the aim of this study.
The fundamental equation governing this operation is the Equation for a magnetic dipole:
where
m is the magnetization of the dipole (
mx,
my,
mz).
r = (
x,
y,
z) indictaes a position in which the magnetic field
H coming from the magnetic dipole
m is estimated. In this study, magnetic chipping having a certain volume was assumed to be a magnetic dipole with the same magnetization
m.
When dimensional limitations were assumed as shown in
Figure 3,
Figure 4 and
Figure 5, the dipole Equation was transformed in Equation (2), in air:
In this transformation, both
m = (0, 0,
mz) and the constants (
y,
z) were assumed to be subjected to the directional limitation of the measurement system, in which soft magnetic chipping was fed parallel to the X-axis within the magnetic field, which had a vertical direction. The reason why the component of the estimated magnetic field was only in present on the X-axis was linked to the sensing direction of the sensor installed in the vertical magnetic field, as shown in
Figure 4.
Based on the above Equation, sensing waveforms were numerically estimated as shown in
Figure 6. This indicated feeding dipole waveforms that were detected by three sensors placed in different positions. Each waveform had one minimum point and one maximum point, and the zero-crossing point between them indicated that the dipole was placed just above the measuring sensor element.
The aim of this estimation of the magnetic dipole’s position was the detection of the position of extreme points appearing in the measured waveform. Extreme positions were identified by the Equation dBx/dx = 0, using Equation (2).
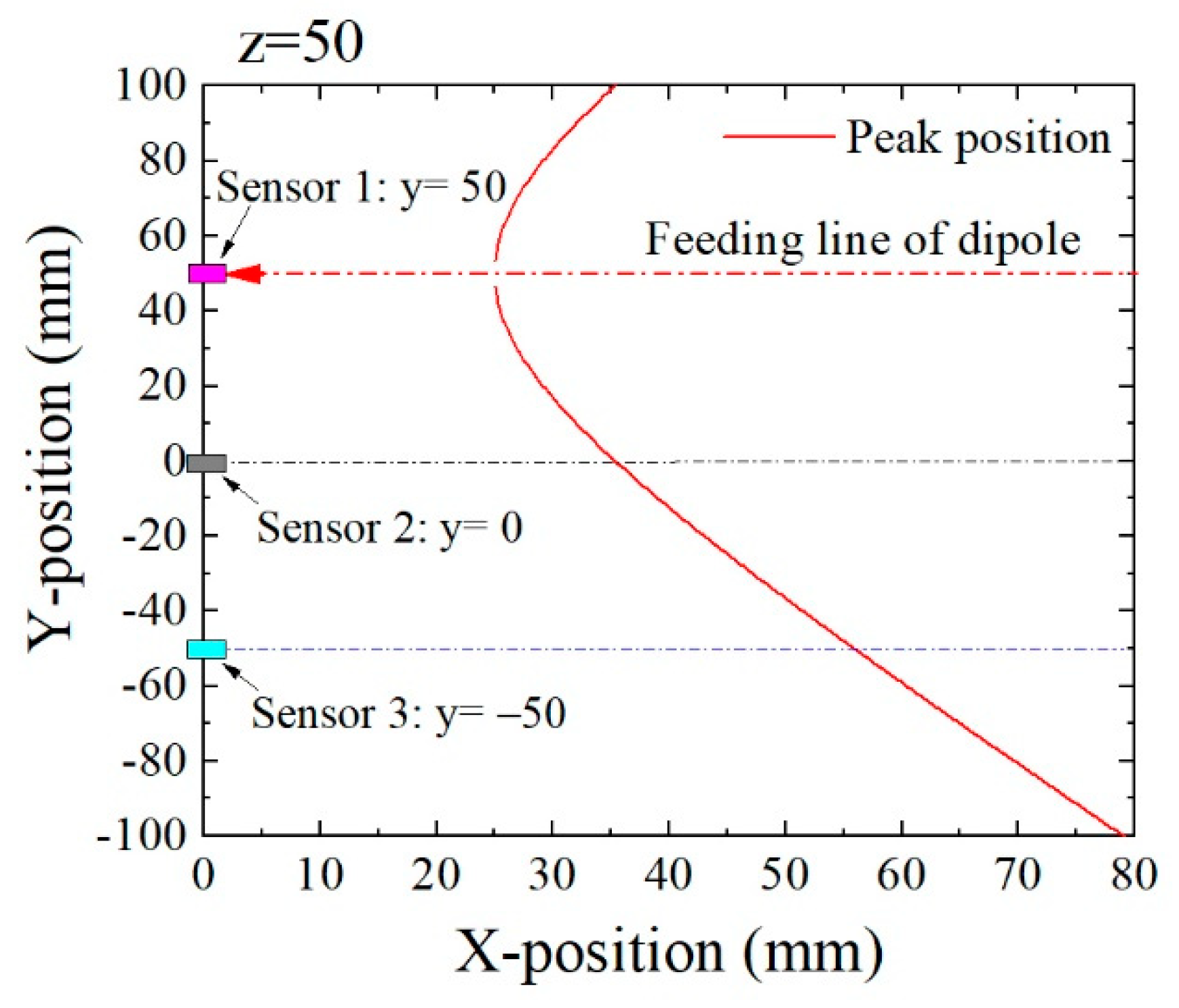
Figure 7 shows an example of variation of the maximum extreme point when a magnetic dipole was fed along the dashed line on
y = 50. The height of this feeding line of the dipole was
z = 50. This figure shows a dependence of the X-position of the extreme point on the Y-position. When a sensor was placed on the position (
x,
y,
z) = (0, 0, 0), the extreme point of the measured magnetic flux density
Bx was observed at the dipole position
x on the feeding line, which was at the same
x value of the crossing point of the dotted line
y = 0 with the solid curve. When a sensor was placed on the position (0, −50, 0), the extreme point of
Bx was observed at the dipole position
x on the feeding line, which was at the same the
x value of the crossing point of the dotted line on
y = −50 with the solid curve. When a sensor was placed on the position (0, 50, 0), which was just below the feeding line of the dipole, the extreme point was observed at the dipole position
x on the feeding line, which was at the same
x value of the crossing point of the dotted line on
y = 50 with the solid curve. In the last case, the extreme point was observed at
x =
H/2, where
H is the height of the feeding line, in this case,
x = 25.
Figure 8 is the analogous estimation of the extreme point when the feeding line passed the point (
y,
z) = (50, 100), which was 50 mm higher than the feeding line, as shown in
Figure 7. In this case, the extreme point appeared at higher value of
x compared with its position in
Figure 7. From these figures, it is expected to estimate the feeding position (
y,
z) based on the dimensions of extreme points obtained by several sensors.
Based on Equation (2), the first-order differentiation of
x, when the (
y,
z) was constant, was easily derived as follows:
when
Bx had the extreme value, the first derivative equaled zero:
Based on Equation (3), the following equation was derived at the extreme point:
From the Equation (4), it is understood that the extreme point x is derived from the sectional position (y, z), independent of the magnetization mz.
By using two Equations of extreme points which were obtained by two sensors, one placed at (0, 0, 0) and the other placed at (0,
DS, 0), Equation (4) results in two Equations, as follow:
where sensor-1 (indicated by
S1) was placed at (0, 0, 0), and sensor-2 was placed at (0,
DS, 0). The extreme point which was measured by
S1 is indicated as
XS1, and the point measured by
S2 is indicated as
XS2.
By erasing
z2 using Equations (5) and (6), the feeding position (
y,
z) is derived analytically as follows:
Based on the sensing waveform in
Figure 6, the zero-crossing point appeared when the magnetic dipole was placed just above the sensor. The extreme points appeared symmetrically with respect to this zero-crossing point, then
XS1 and
XS2 were independent of the maximum or the minimum. It is possible to estimate this value as follows:
where # is 1 or 2, indicating the sensors, the suffix “MAX” indicates the maximum point, and the suffix “min” indicates the minimum point. Equation (9) is useful when the sensor is not placed at the original point or when each sensor has a different X-position.
Figure 9 shows a flow chart of position estimation based on our proposed equations. Some experimental confirmations were carried out and are presented in the following sections, based on this flow chart.
3. Experimental Confirmation
Experimental confirmation of the proposed method of position estimation was carried out and is reported in this section.
Figure 10 shows a schematic of the experimental apparatus of this study. This measurement apparatus was described in another article previously published [
12]. In this apparatus, magnets are fixed on the inner surface of a rectangular magnetic core to generate a strong vertical field in the measurement area. Soft magnetic plates are put on both the upper and the lower magnets to make the field uniform. They are called homogenization plates. Sensors are set on the surface of the lower homogenization plate, near the middle position of the plate on the feeding direction X.
Figure 11 shows a side view of magnetic field distribution, a contour line expression of the vertical magnetic flux density
Bz. The homogenization plates can produce a uniform field, but a certain degree of expansion would appear around the middle area of the measurement area. The vertical magnetic flux density was 37 mT at the sensor position and 24 mT in the middle of the measurement area. This apparatus can detect a soft magnetic small piece when it is fed along the X-direction in the measurement area between the homogenization plates.
The sensor element was fabricated by a thin-film process. An amorphous Co
85Nb
12Zr
3 film was RF-sputter-deposited onto a soda glass substrate and then micro-fabricated into rectangular elements by a lift-off process. The element was 1000 μm in length, 50 μm in width, 2.1 μm in thickness. Tens of elements were aligned in a parallel configuration and connected by Cu thin-film strips to form a meander pattern. A magnetic field was applied during RF-sputter deposition for the purpose of inducing uniaxial magnetic anisotropy. Magnetic anisotropy in this study was oriented in the width direction, that is, the short-side direction of the element strip. It was induced by the direction of the magnetic field while sputtering. The element and the fabrication process were the same as in our previous work [
1].
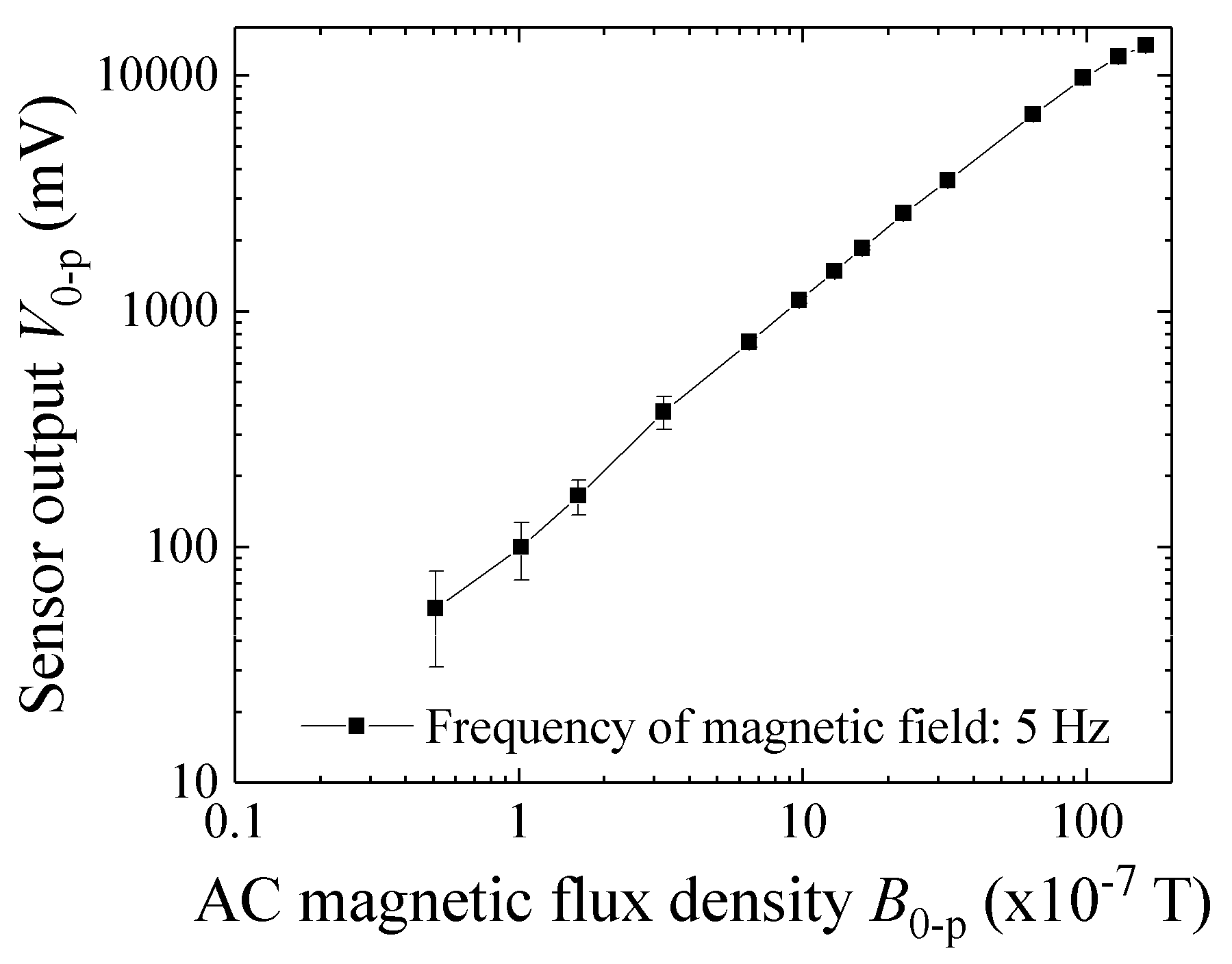
Figure 12 shows the variation of the sensor output as a function of the applied magnetic flux density along the sensing direction. The sensor was driven by a 400 MHz current and detected using a logarithmic amplifier [
1]. In this sensor, the output voltage of 100 mV corresponded to 0.1 μT (1 mG). The following measurements were obtained by using sensors which had the same configuration as the presented sensor system.
Figure 13 shows one of the measurement samples made of tool steel. Its dimensions were
ϕ5 × H4 mm. The two experimental confirmations described in this article used this sample.
3.1. Height Estimation Just above the Sensor
Figure 14 is a schematic explanation of the measurement layout for the first experiment.
Figure 14a shows a front view and
Figure 14b shows a side view of the layout. The front view is shown from the viewpoint of the feeding sample. The sample was fed at constant velocity, 100 mm/s, along the X-axis just above the middle sensor of the installed three sensors. In this case, the sample height
H was the parameter to be estimated.
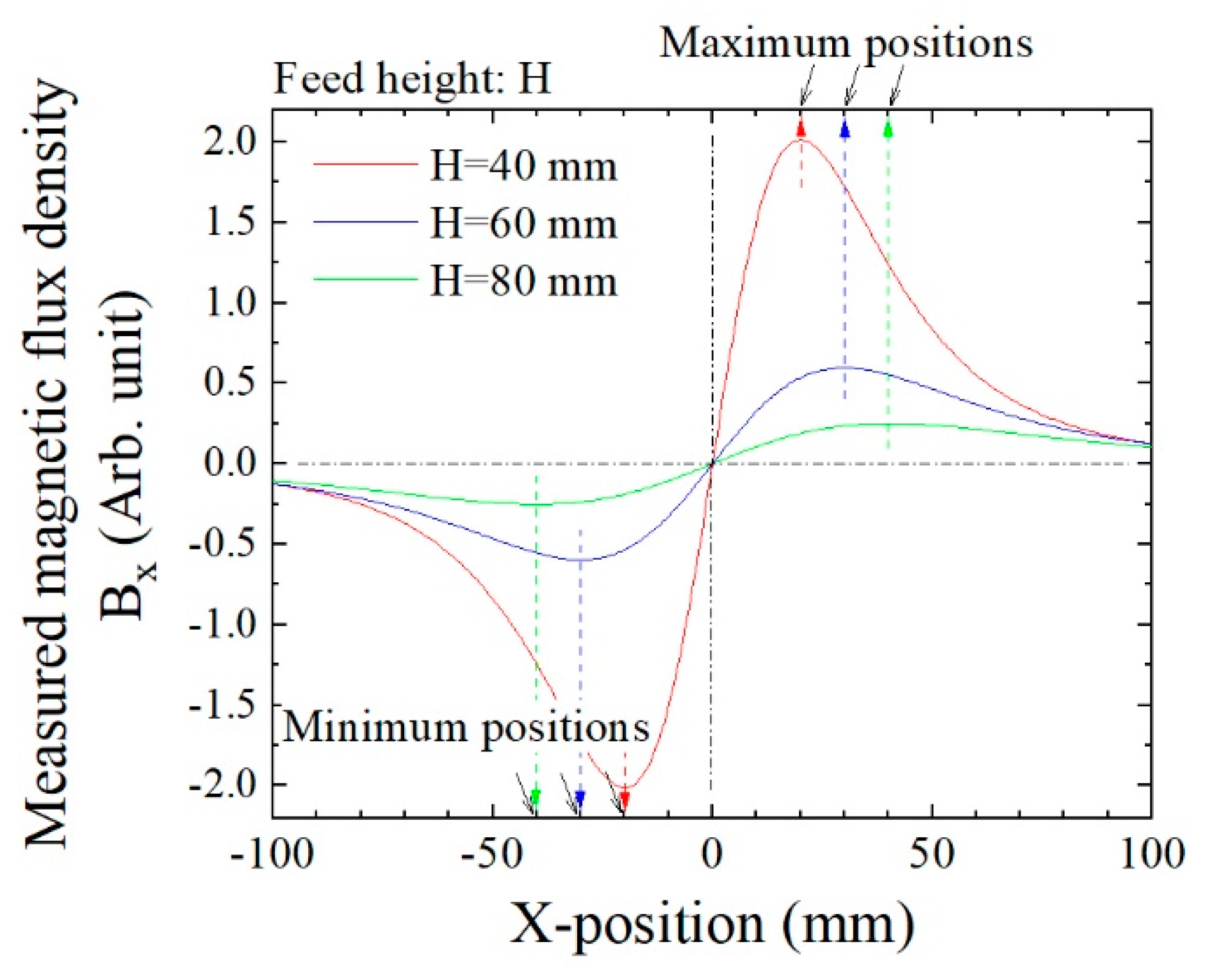
Figure 15 is a numerically simulated variation of
Bx on the sensor position as a function of X. The magnetic dipole passed just above the sensor at the origin. Two extreme points appeared symmetrically with respect to the zero-crossing point, one was the maximum point, and the other was the minimum point. The extreme position
XS1 was derived using Equation (9) and two extreme points. In the case in which the dipole was running through just above the sensor, the height was estimated as
H = 2 ×
XS1 based on Equation (8). This Equation also indicated that the feeding height
H equaled the distance between two extreme points, which was between the maximum and the minimum points.
Figure 16 and
Figure 17 show examples of the measured data.
Figure 16 shows the case in which the feeding height was
z = 32 mm, and
Figure 17 that in which the feeding height was
z = 47 mm. In these figures, the horizontal axis indicates time, and the sample was fed in the +X-to-−X direction, which is the reason why these figures have a opposite polarity compared with
Figure 15. In comparison with
Figure 16 and
Figure 17, the horizontal distance of the two extreme points in
Figure 17 had a larger value. This is because the horizontal distance between the two extreme points, i.e., the maximum point and the minimum point, corresponded to the feeding height of the dipole from the sensor element, which was deduced from Equation (8). The output signal 1 V corresponded to 10
−6 T (10 mG) based on
Figure 12, and the time of 0.1 s on the horizontal axis corresponded to 10 mm based on the feeding velocity. These are raw data; therefore the zero-crossing point was not set to be at an original point.
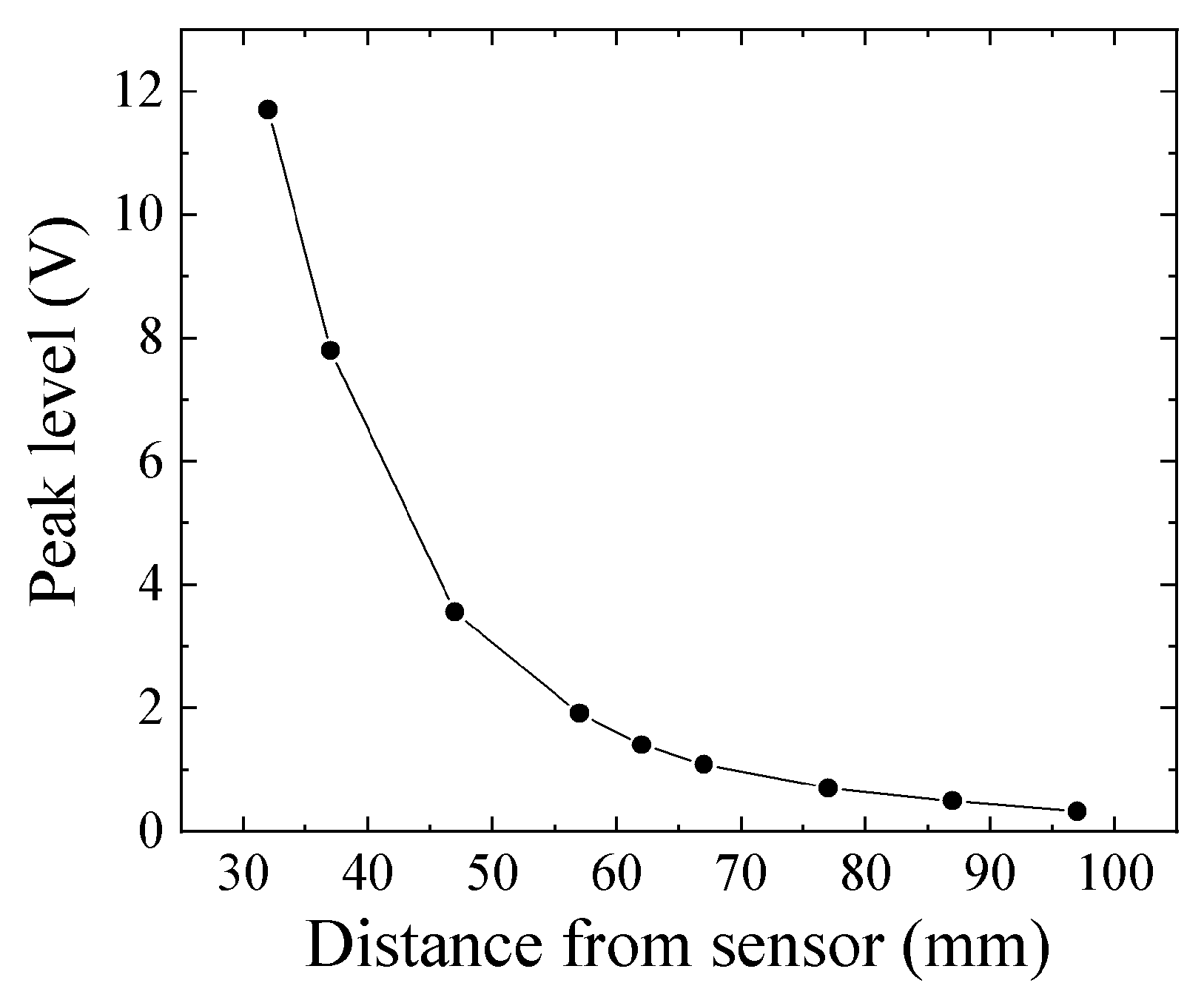
Figure 18 shows the dependence of the maximum value of sensor output voltage on the height of tool steel chipping. From Equation (2), the measured magnetic flux density decreased as the inverse of the cubic function of distance. This figure shows a tendency, as expected according to this Equation. The measured sample was
ϕ5 × H4 mm (
Figure 13).
Figure 19 shows an experimental result of height estimation. The horizontal axis represents the actual height of feeding tool steel chipping, and the vertical axis represents an estimated height based on Equation (8). This estimation of height, just above the sensor, had a measurement error that increased as the height increased. The reason of this increment of the measurement error is that the magnetic flux contour line around the middle height of the measurement area expanded toward the outer direction. This resulted in a variation of the direction of the magnetic flux vector from that of parallel vertical lines; therefore, it induced an uneven magnetic field in the measurement area. Based on the measured results of
Figure 11, the contour line of magnetic flux expanded outward around the middle of the height; then, the magnitude of the flux density also decreased as a function of the distance from the sensor. This effect was expected to change the position of the measured extreme point towards an inner position. This non-uniformity of the strong applied magnetic field could induce an estimation error not only for height position Z but also for the width position Y.
3.2. Position Estimation in Constant Height z = 54 mm
Figure 20 shows the layout for the second experiment. In this case, the width position Y was at a constant height
z = 54 mm.
Figure 20a shows a front view, and
Figure 20b shows a side view of the feeding line in this experiment. The front view is shown from the viewpoint of the feeding sample. The feeding velocity was 70 mm/s in this experiment.
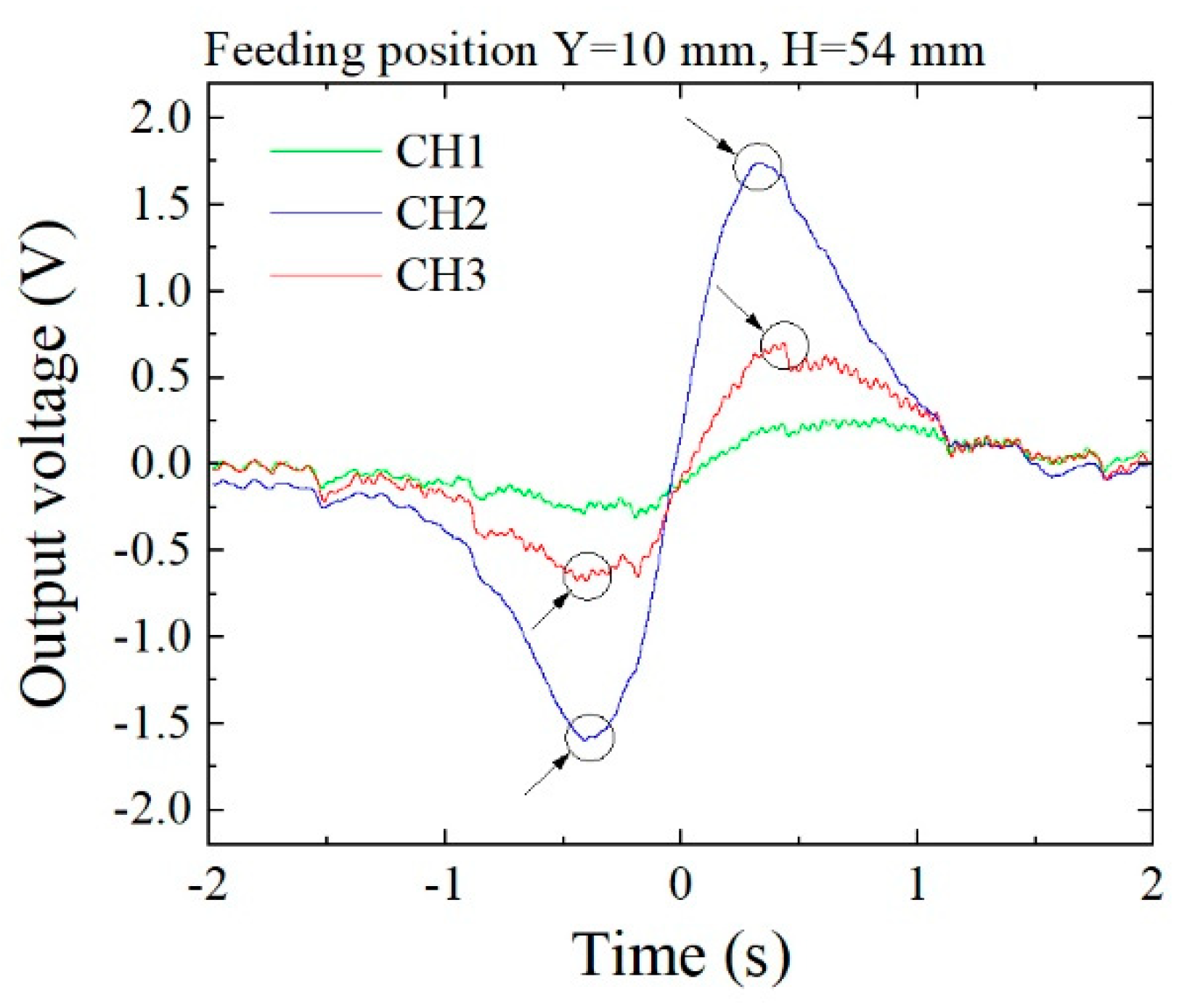
Figure 21 shows the measured waveforms of three sensors when the feeding line was at
y = 10 and
z = 54.
Figure 22 shows the waveforms when
y = 30,
z = 54. Compared with these waveforms, the magnitude of the extreme points in the largest and the second larger line differed greatly, as shown in
Figure 18. In this measurement, a certain degree of noise appeared, due to the detection electric circuit. The detection of the extreme point in the second larger line suffered a measurement error due to this electric noise. In this measurement, the polarity of the sensor driving circuit was set as negative.
Table 1 shows the results of position estimation. Δ
r in this table is the estimated error.
Figure 23 is a schematic illustration of the result. In the figure, the actual positions of the feeding line of the magnetic piece are shown as red points in the Y–Z plane, and their estimated feeding positions are shown as blue points. The correspondence is indicated by arrows in the figure. This result shows that the points which were adjacent to the right overhead of a sensor could not be precisely estimated, reporting an 8 mm to 10 mm estimation error. This is because the sensor signal with the second larger extreme point decreased in magnitude, almost to the same level as the noise of the detection circuit. The results showed that the feeding point placed almost in the middle of the two sensors could be estimated with good precision, and its estimation error was smaller than the sample size of
ϕ5 × H4 mm. Estimation accuracy may be enhanced by increasing the sensitivity of the sensor and decreasing the circuit noise. Increasing the applied magnetic field can also be effective.
3.3. Position and Size Estimation in an Arbitrary (y,z) Position
Figure 24 shows three different specimens used for the final experiment. In this experiment, tool steel chippings with different sizes were placed in different feeding positions. In this experiment, both the feeding position (
y,
z) and the magnetic moment
m were estimated experimentally. The feeding velocity was 70 mm/s. In
Figure 24, the dimensions and weight of the samples are shown; they are as follows:
Sample 1: ϕ5 × H4, 0.63 g
Sample 2: ϕ6 × H4 with ϕ2 central hole, 1.11 g
Sample 3: ϕ5 × H10, 1.59 g
Table 2 shows the results, schematically reported in
Figure 25. The actual positions of the feeding line of the magnetic piece are shown as red points in the Y–Z plane, and their estimated feeding position are shown as blue points. The correspondence is indicated by arrows in the figure, as for the previous experiment. In this case, the position was estimated with good precision, because all samples were not in the area adjacent to the right overhead of the sensor. The estimation error was smaller than the sample size. The magnitude of the magnetic moment
m approximately corresponded to the volume of the sample. It is well known that the magnetic moment is affected by a demagnetizing force when a soft magnetic sample is magnetized in a constant magnetic field. In this study, even when the effect was taken into consideration, the order of magnitude of the magnetic moment was in accordance with the sample volume. The estimated order of the magnetic moment is shown in
Table 2. It is shown that the estimated order of the magnetic moment was in agreement with the order of the sample volume.
4. Discussion
Our proposed method to estimate the position of a magnetic contaminant was applied to actual measurements. We showed that it is independent of the sensitivity and polarity of each sensor, because it is based on position detection of the extreme point.
In this section, a method of curve fitting is described for the purposes of improving the accuracy and carrying out an automatic detection of the extreme position. The fundamental Equation in this case is the previously presented Equation (2). Based on this Equation, a method of extracting feature quantity is proposed, and curve fitting against the measured sensor waveform is tried and discussed.
Based on the introduction of certain feature quantities, Equation (2) is transformed as follows:
where
A,
B,
C,
P′ are parameters for curve fitting.
A is a coefficient of magnitude of the waveform.
B represents the X-positional displacement of the measurement sensor.
C is a measurement offset of the magnetic flux density
Bx.
P′ is as follows:
Based on Equation (4), the extreme position
xp is deduced as follows:
It is easily understood that the extreme position is obtained from the measured waveform using the fitting parameter P′.
Figure 26 shows an example of curve fitting for a measured result. The dotted line is the measured result of the feeding position (
y,
z) = (10, 54). The fitting was carried out using a function contained in Origin 2021. Even if the fitting procedure was completed, a certain mismatch was observed in this result. The estimated extreme position obtained by curve fitting was different from the measured waveform. A possible reason is that the magnetic structure of this experiment had a certain distortion compared with an ideal parallel normal field.
Figure 27 indicates the difference of the obtained peak point between the raw data and the curve-fitting data. The difference was almost 10%, and curve-fitting underestimated it in this case.






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}