
START: A Satellite Three Axis Rotation Testbed


Abstract
:1. Introduction
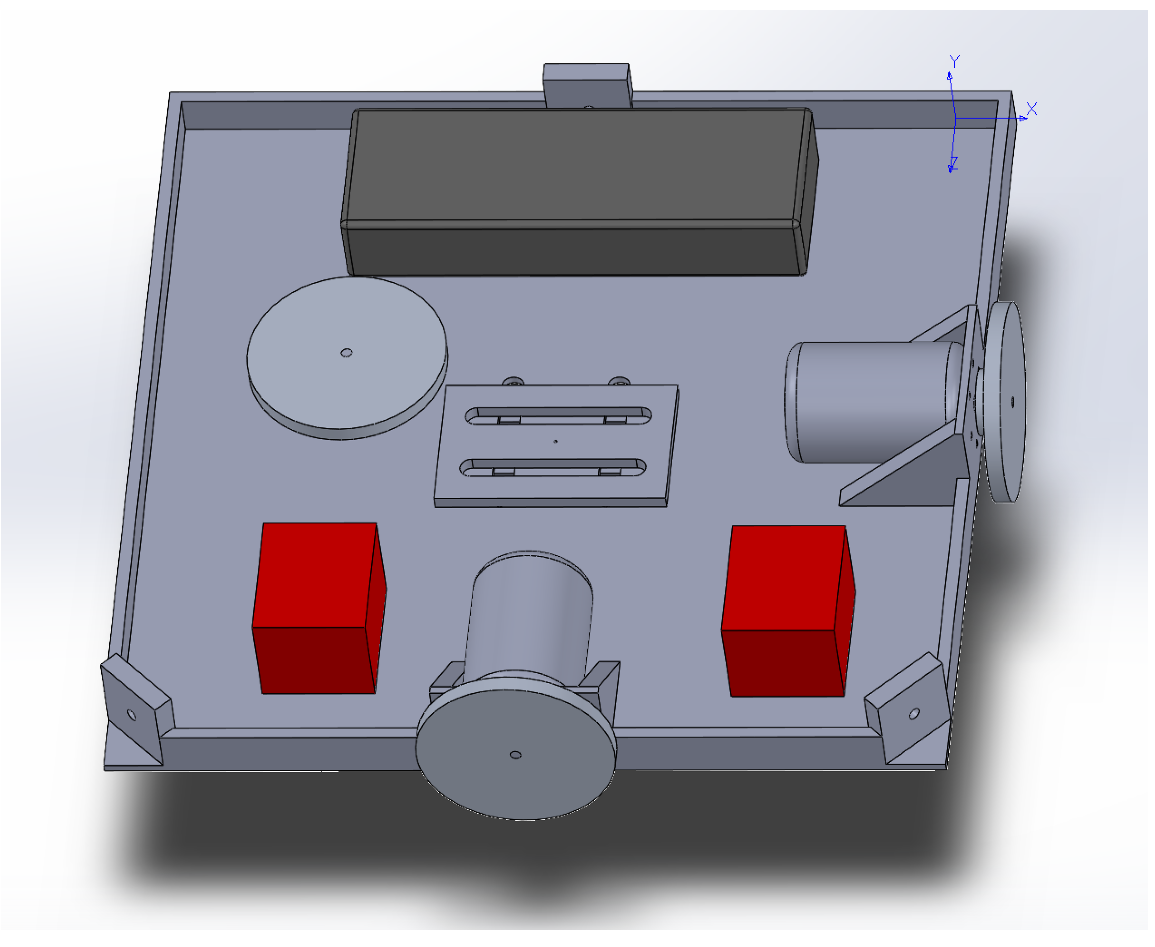
2. Hardware
2.1. Overview
2.2. Rotating Base
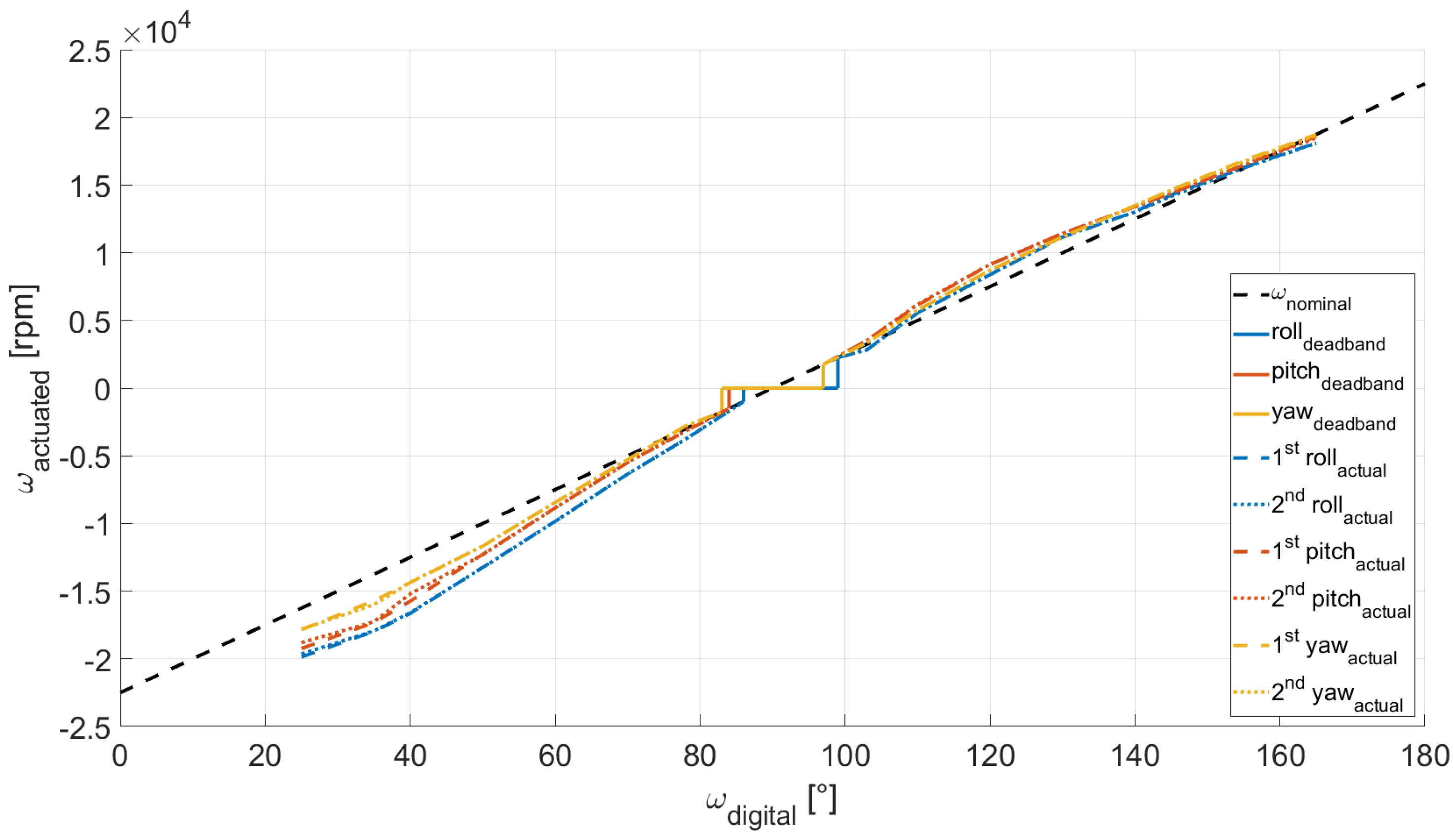
2.3. Reaction Wheels
2.4. Motion Capture System
3. Software
3.1. Architecture
3.2. Simulink Models
4. ADCS and Preliminary Testing
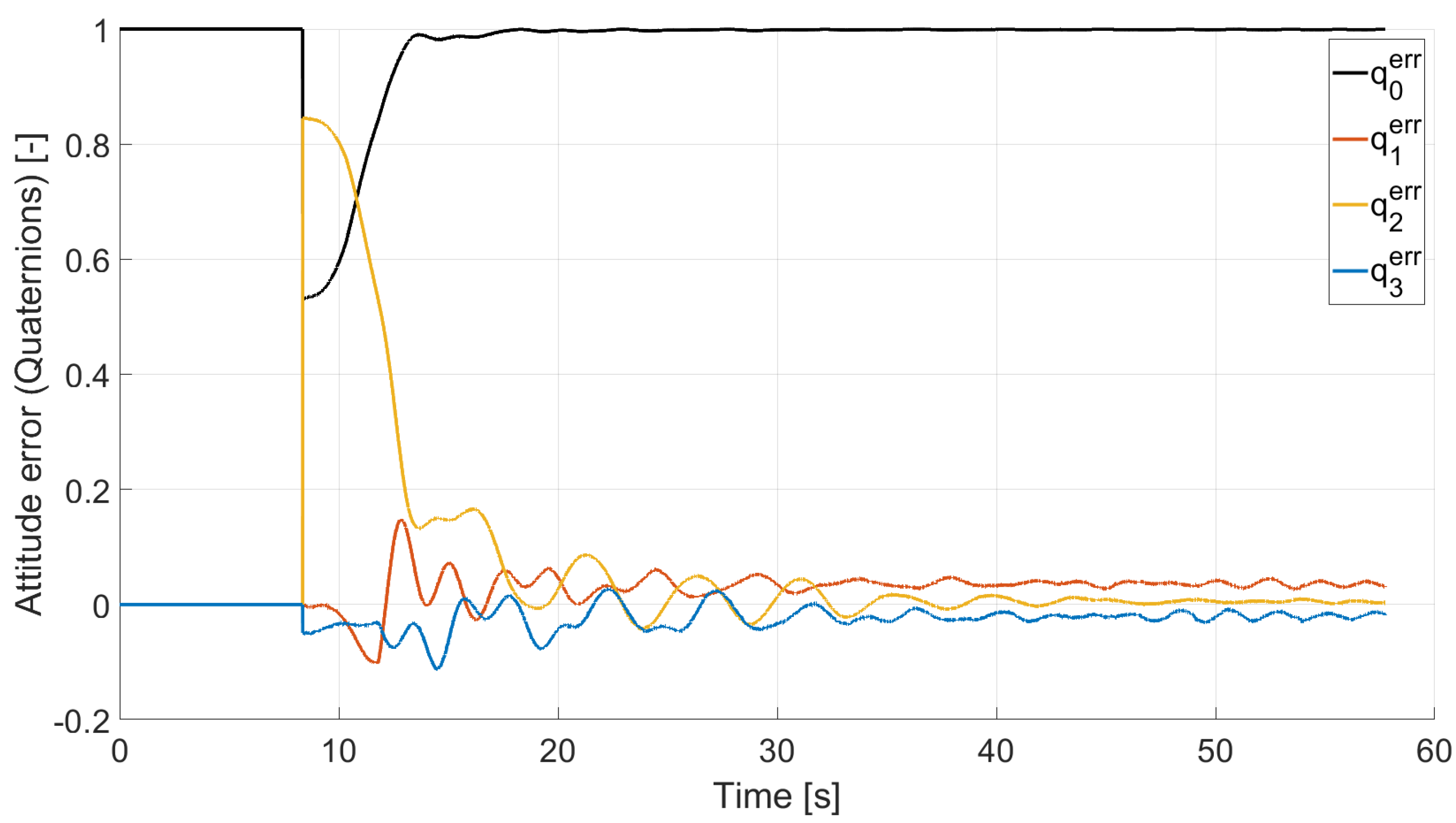
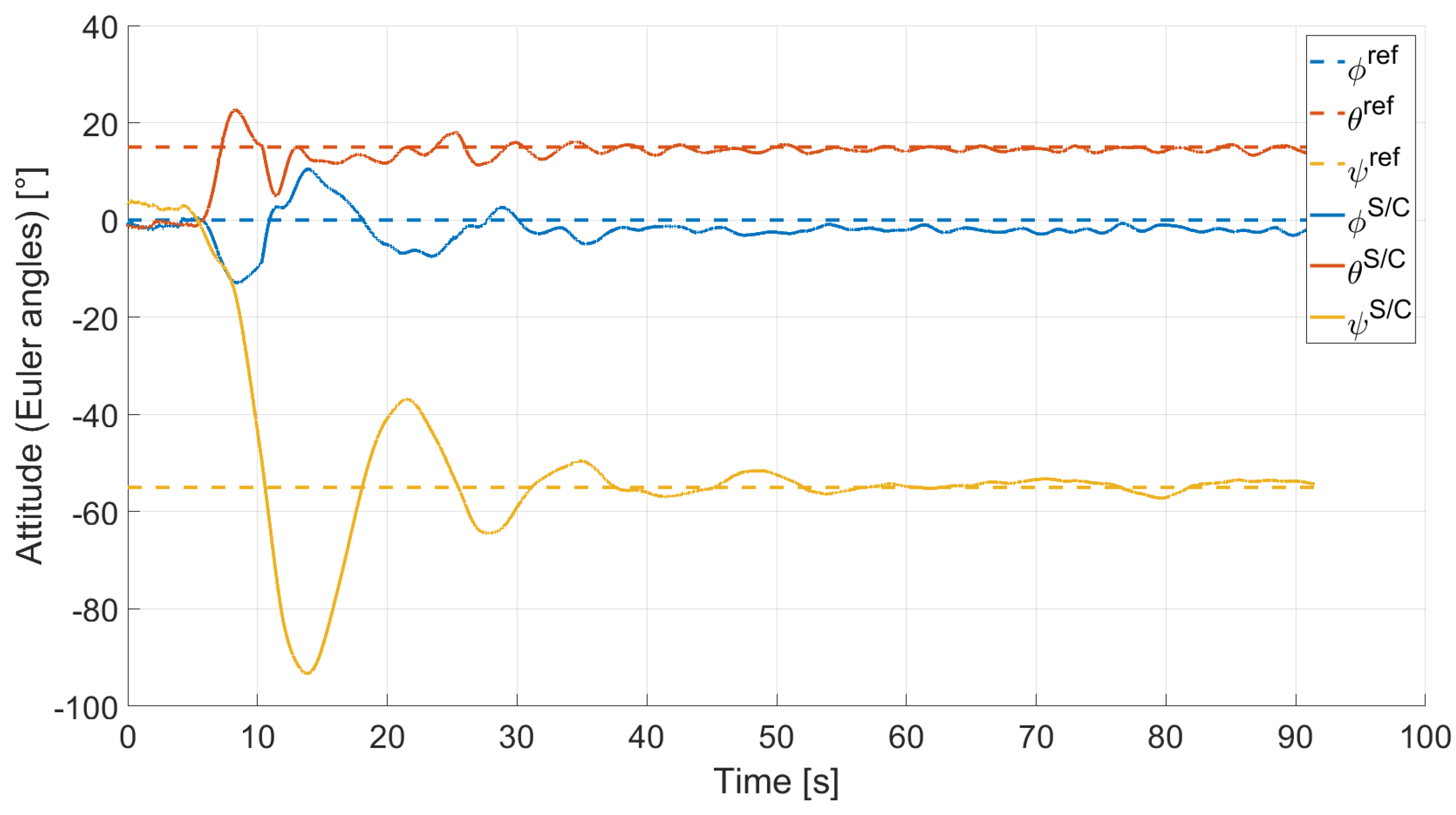
4.1. Case 1: Rest-to-Rest Pointing Yaw Maneuver
4.2. Case 2: Rest-to-Rest Pointing Two-Axis Maneuver
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bouwmeester, J.; Guo, J. Survey of worldwide pico- and nanosatellite missions, distributions and subsystem technology. Acta Astronaut. 2010, 67, 854–862. [Google Scholar] [CrossRef]
- Wilde, M.; Clark, C.; Romano, M. Historical survey of kinematic and dynamic spacecraft simulators for laboratory experimentation of on-orbit proximity maneuvers. Prog. Aerosp. Sci. 2019, 110, 100552. [Google Scholar] [CrossRef]
- Schwartz, J.L.; Peck, M.A.; Hall, C.D. Historical Review of Air-Bearing Spacecraft Simulators. J. Guid. Control. Dyn. 2003, 26, 513–522. [Google Scholar] [CrossRef] [Green Version]
- Modenini, D.; Bahu, A.; Curzi, G.; Togni, A. A Dynamic Testbed for Nanosatellites Attitude Verification. Aerospace 2020, 7, 31. [Google Scholar] [CrossRef] [Green Version]
- Chesi, S.; Perez, O.; Romano, M. A Dynamic Hardware-in-the-loop Three-Axis Simulator of Nanosatellite Dimensions. J. Small Spacecr. 2015, 4, 315–328. [Google Scholar]
- da Silva, R.C.; Guimarães, F.C.; de Loiola, J.V.L.; Borges, R.A.; Battistini, S.; Cappelletti, C. Tabletop Testbed for Attitude Determination and Control of Nanosatellites. J. Aerosp. Eng. 2019, 32, 04018122. [Google Scholar] [CrossRef] [Green Version]
- Kato, T.; Heidecker, A.; Dumke, M.; Theil, S. Three-Axis Disturbance-Free Attitude Control Experiment Platform: FACE. Trans. Jpn. Soc. Aeronaut. Space Sci. Aerosp. Technol. Jpn. 2014, 12, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Tapsawat, W.; Sangpet, T.; Kuntanapreeda, S. Development of a hardware-in-loop attitude control simulator for a CubeSat satellite. IOP Conf. Ser. Mater. Sci. Eng. 2018, 297, 012010. [Google Scholar] [CrossRef]
- Tavakoli, A.; Faghihinia, A.; Kalhor, A. An Innovative test bed for verification of attitude control system. IEEE Aerosp. Electron. Syst. Mag. 2017, 32, 16–22. [Google Scholar] [CrossRef]
- Hurtado, J.; Goecks, V.G.; Probe, A. Low-Cost Satellite Attitude Hardware Test Bed. In Proceedings of the ASEE Annual Conference and Exposition, New Orleans, LA, USA, 26–29 June 2016. [Google Scholar] [CrossRef]
- MATLAB; The MathWorks Inc.: Natick, MA, USA, 2020.
- TrackStar ROAR Approved 1/10th Stock Class Brushless ESC and Motor Combo (13.5T); HobbyKing: Kwun Tong, Hong Kong, 2020.
- Turnigy Nano-Tech 5600mah 2S2P 50 100C Hardcase Lipo Pack (ROAR APPROVED); HobbyKing: Kwun Tong, Hong Kong, 2020.
- Raspberry Pi 3 Model B+; Raspberry Pi Foundation: Cambridge, UK, 2020.
- OptiTrack Motive Motion Capture Software; NaturalPoint, Inc.: Corvallis, OR, USA, 2020.
- SOLIDWORKS; Dassault Systèmes SolidWorks Corporation: Waltham, MA, USA, 2020.
- Prime 13; NaturalPoint, Inc.: Corvallis, OR, USA, 2020.
- Cherfan, R. MotiveExample. MATLAB Central File Exchange. 2021. Available online: https://www.mathworks.com/matlabcentral/fileexchange/49085-motiveexample (accessed on 12 December 2021).
- Simulink Desktop Real-Time; The MathWorks Inc.: Natick, MA, USA, 2020.
- Wie, B. Space Vehicle Dynamics and Control; AIAA Education Series; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2008. [Google Scholar] [CrossRef]
- Markley, F.L.; Crassidis, J.L. Fundamentals of Spacecraft Attitude Determination and Control; Space Technology Library, Springer: New York, NY, USA, 2014. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Value | Data | Value |
|---|---|---|---|
| START mass | Max RW DC voltage | ||
| Moment inertia | Max RW current | ||
| Moment inertia | Max RW torque | ||
| Moment inertia | Max RW momentum storage | ||
| Moment inertia | Max RW |
| Initial Conditions | Final Conditions | |||
|---|---|---|---|---|
| Data | [] | [] | [] | [] |
| Case 1 | ||||
| Case 2 | ||||
| Roll | Pitch | Yaw | |||
|---|---|---|---|---|---|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lavezzi, G.; Stang, N.J.; Ciarcià, M. START: A Satellite Three Axis Rotation Testbed. Micromachines 2022, 13, 165. https://doi.org/10.3390/mi13020165
Lavezzi G, Stang NJ, Ciarcià M. START: A Satellite Three Axis Rotation Testbed. Micromachines. 2022; 13(2):165. https://doi.org/10.3390/mi13020165
Chicago/Turabian StyleLavezzi, Giovanni, Nathan J. Stang, and Marco Ciarcià. 2022. "START: A Satellite Three Axis Rotation Testbed" Micromachines 13, no. 2: 165. https://doi.org/10.3390/mi13020165
APA StyleLavezzi, G., Stang, N. J., & Ciarcià, M. (2022). START: A Satellite Three Axis Rotation Testbed. Micromachines, 13(2), 165. https://doi.org/10.3390/mi13020165