
Laser Scanning Guided Localization Imaging with a Laser-Machined Two-Dimensional Flexible Ultrasonic Array



Abstract
:1. Introduction
2. Array Design and Surface Guided Positioning
2.1. Piezoelectric Array Element Design
2.2. Flexible Electrode Design
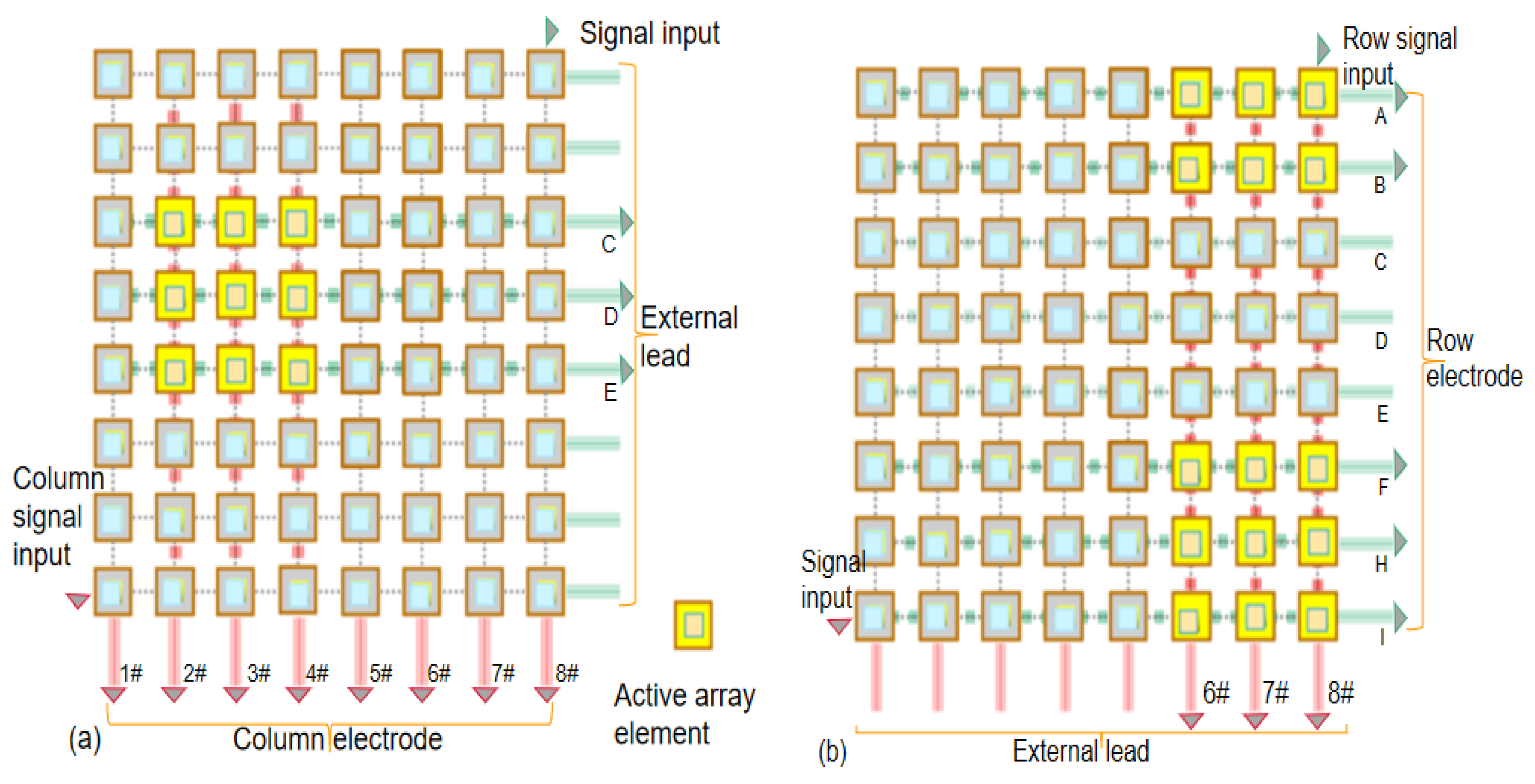
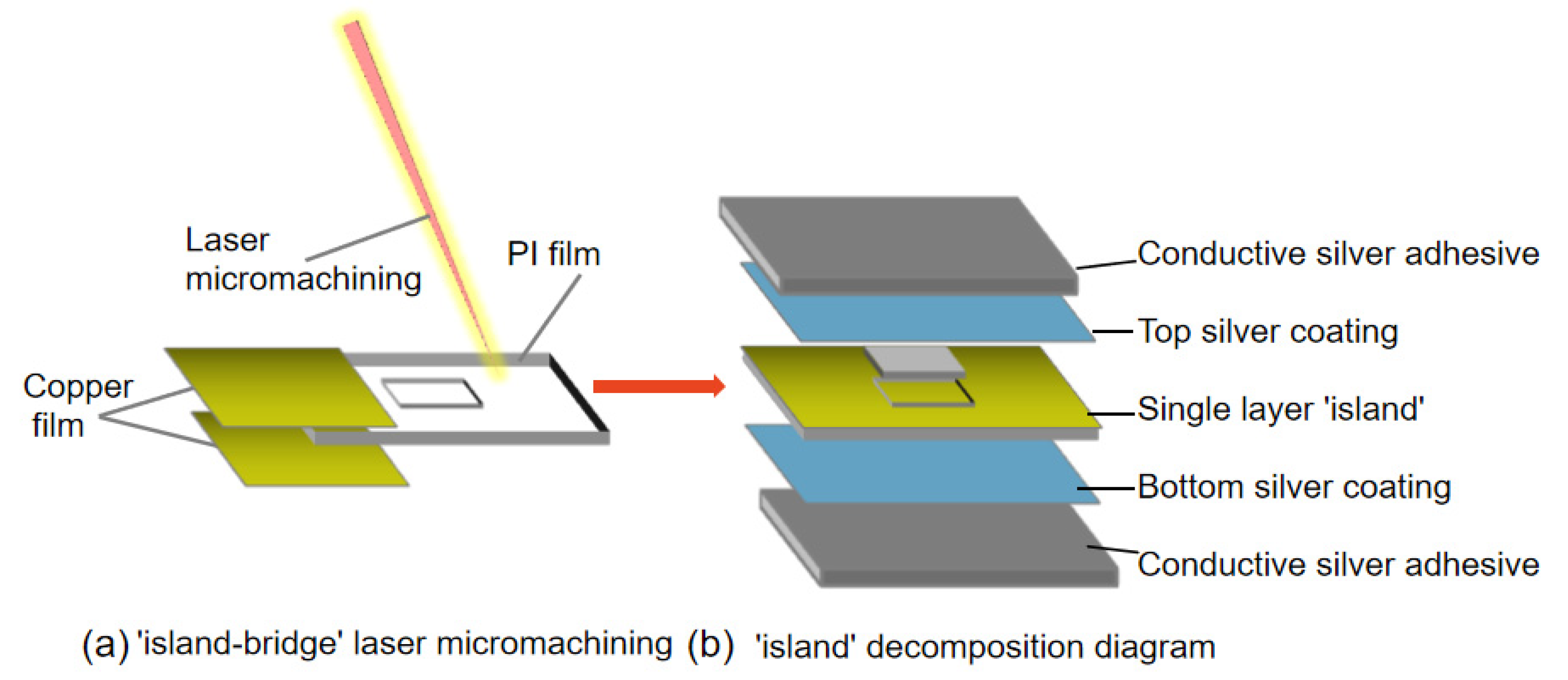
2.3. Design of Single-Layer “Island Bridge” Array
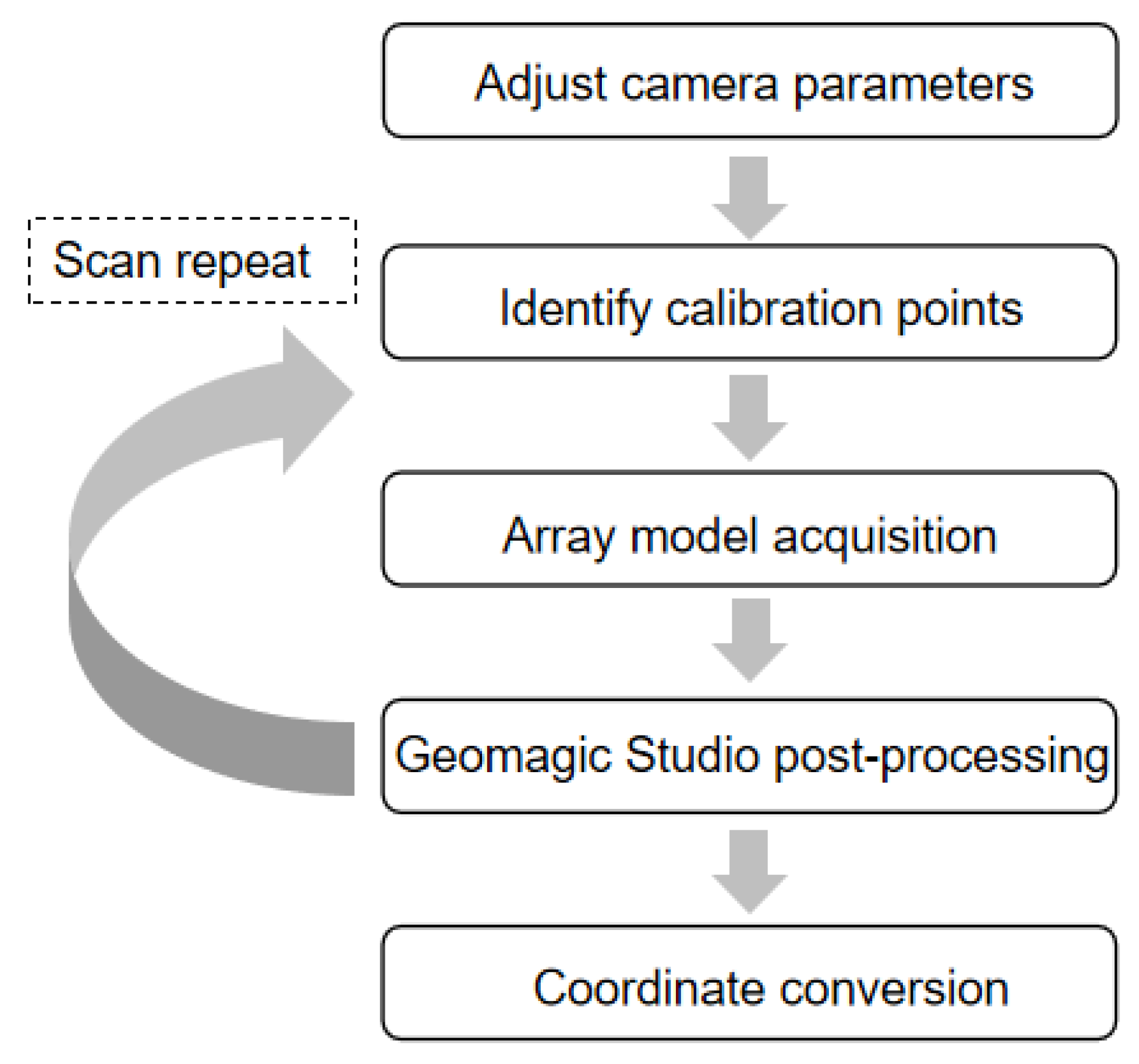
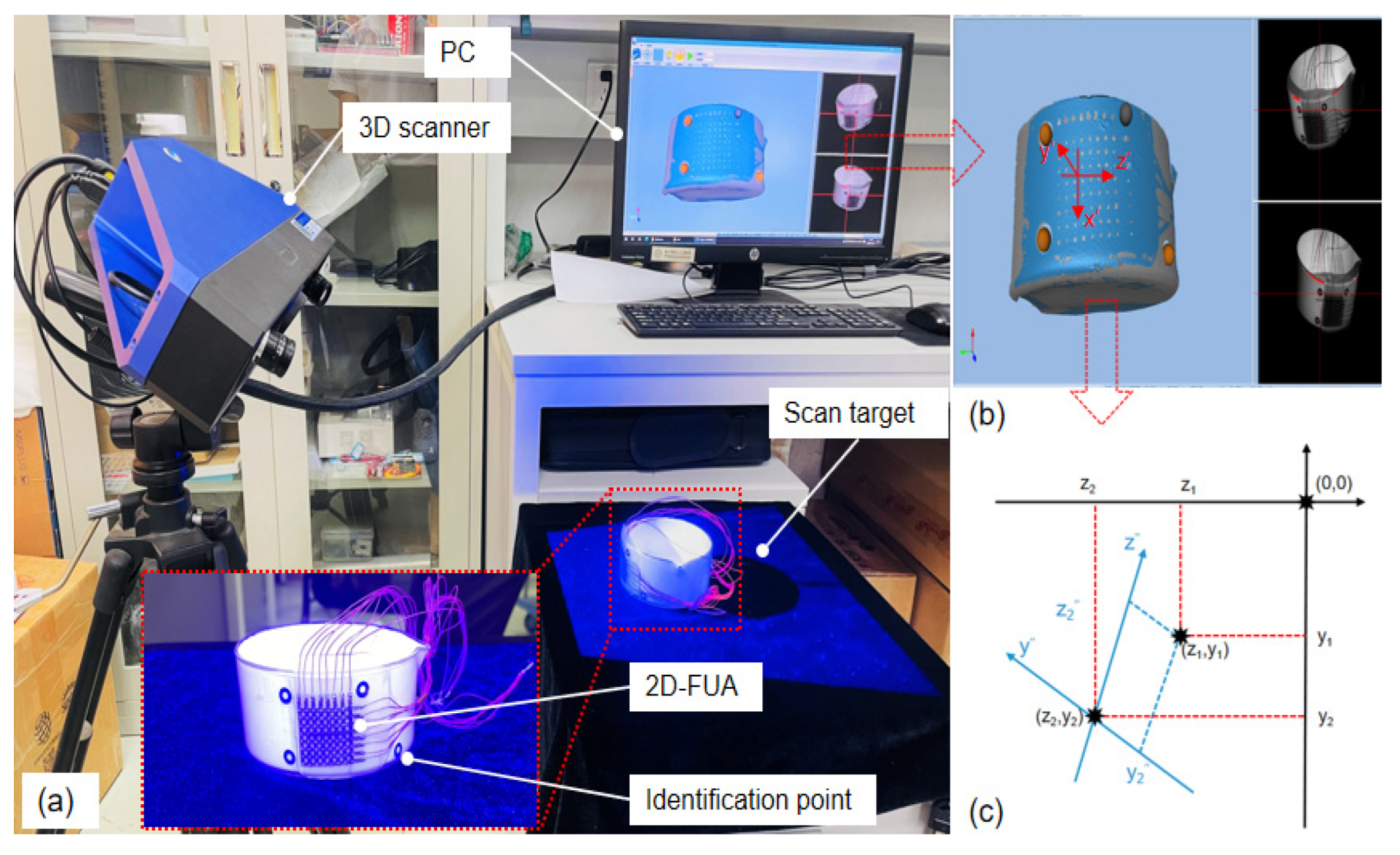
2.4. Laser Scanning Guided Surface Array Element Positioning
3. Results and Discussion
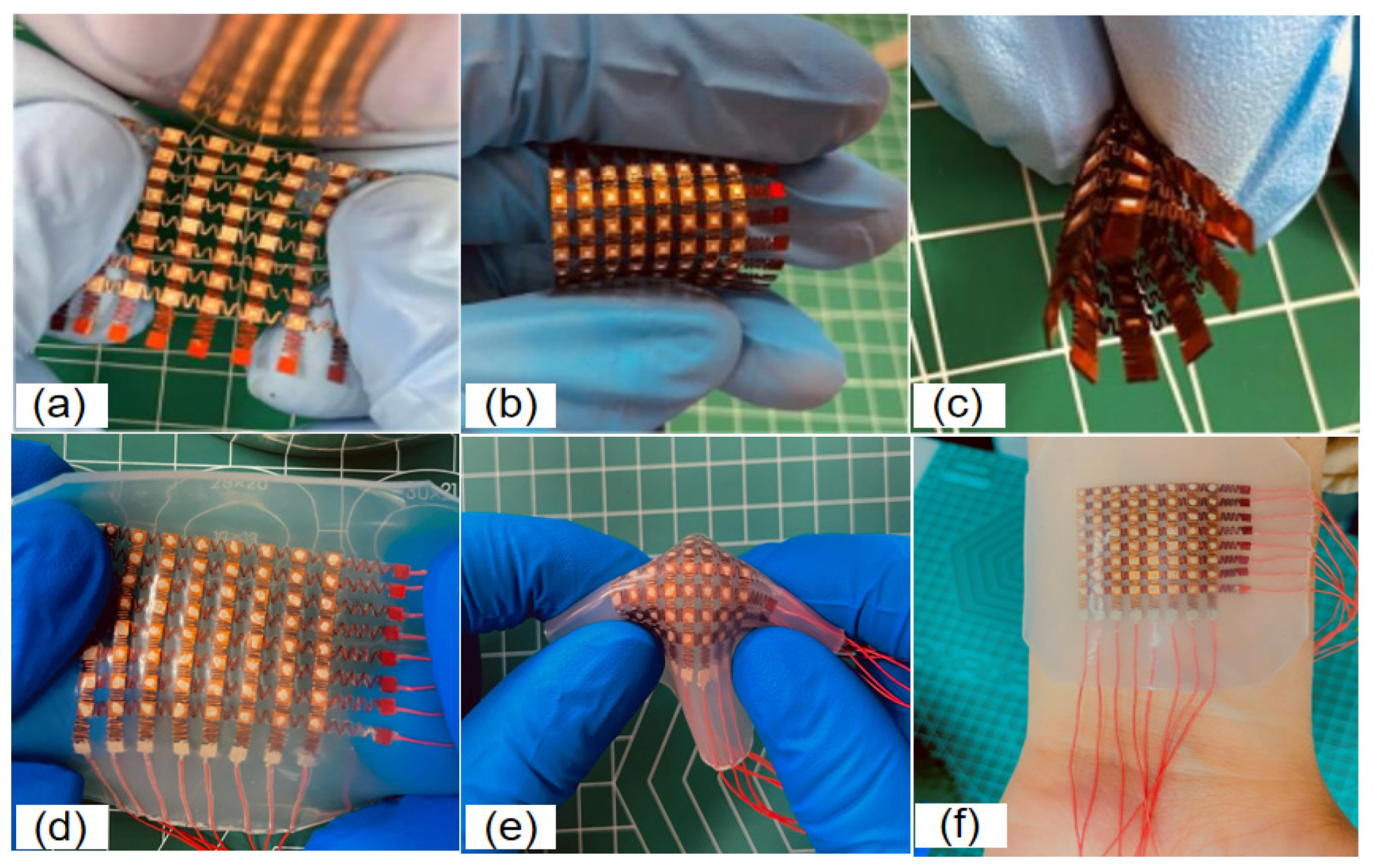
3.1. Mechanical Properties Characterization
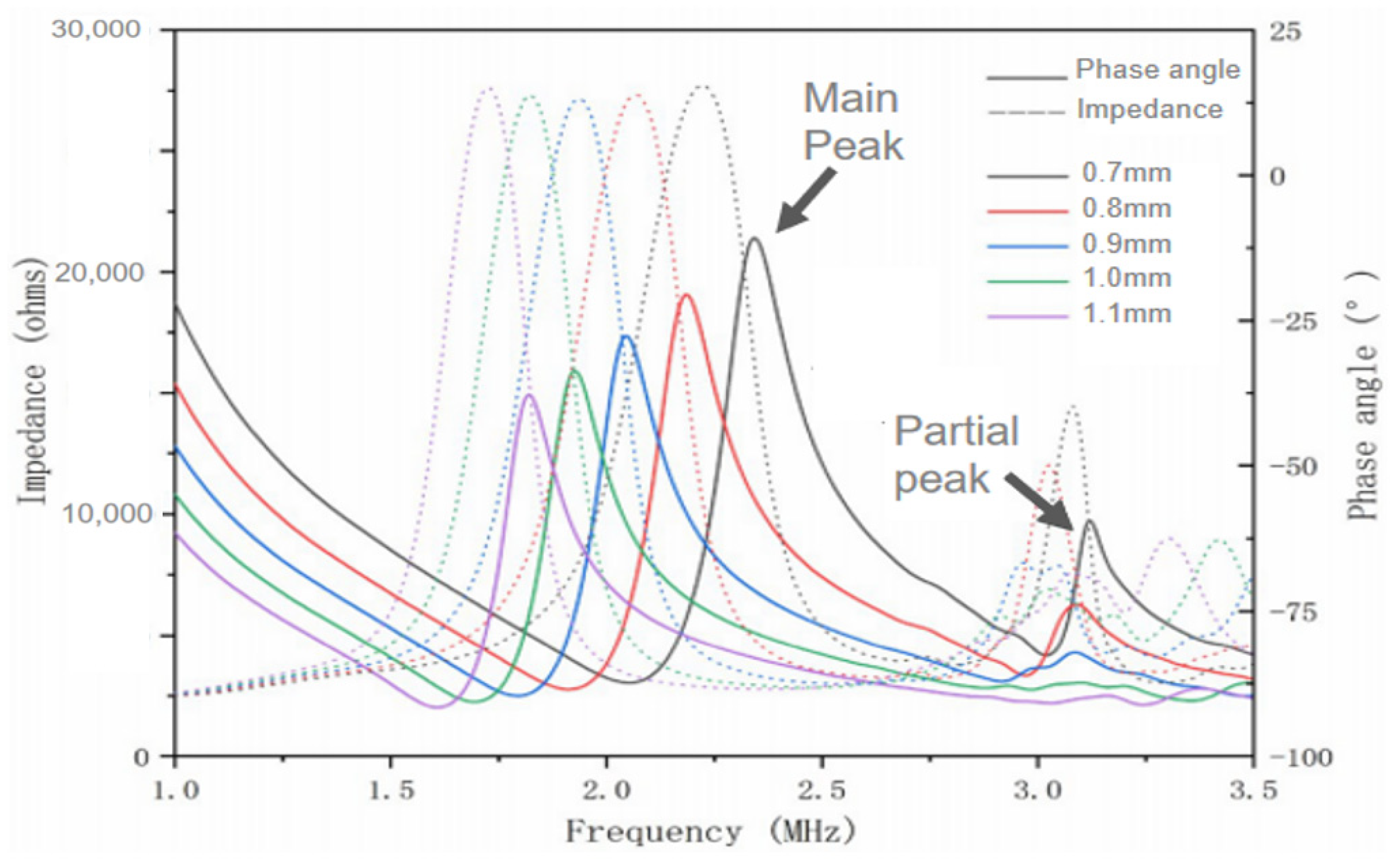
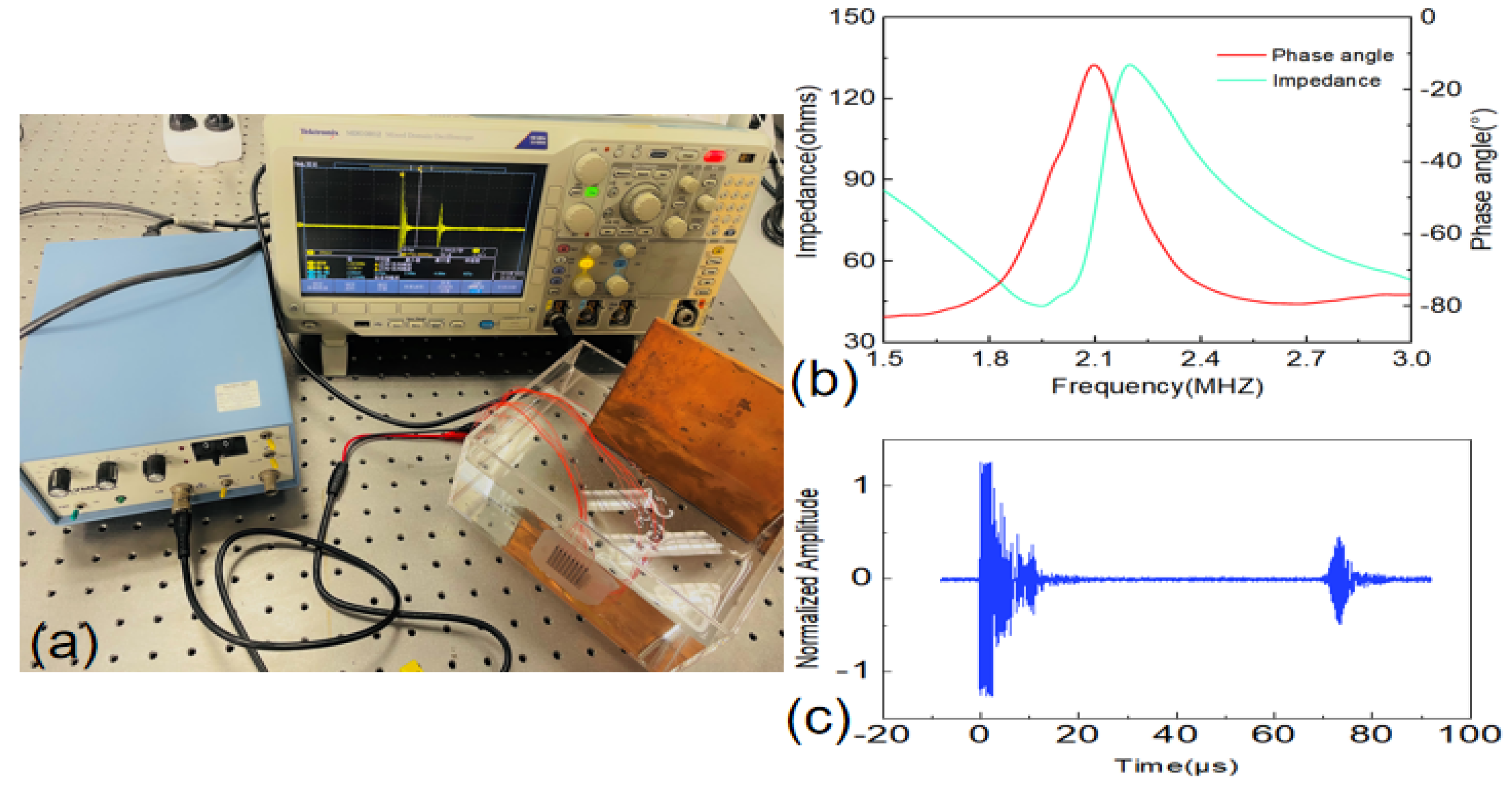
3.2. Acoustic Performance Characterization
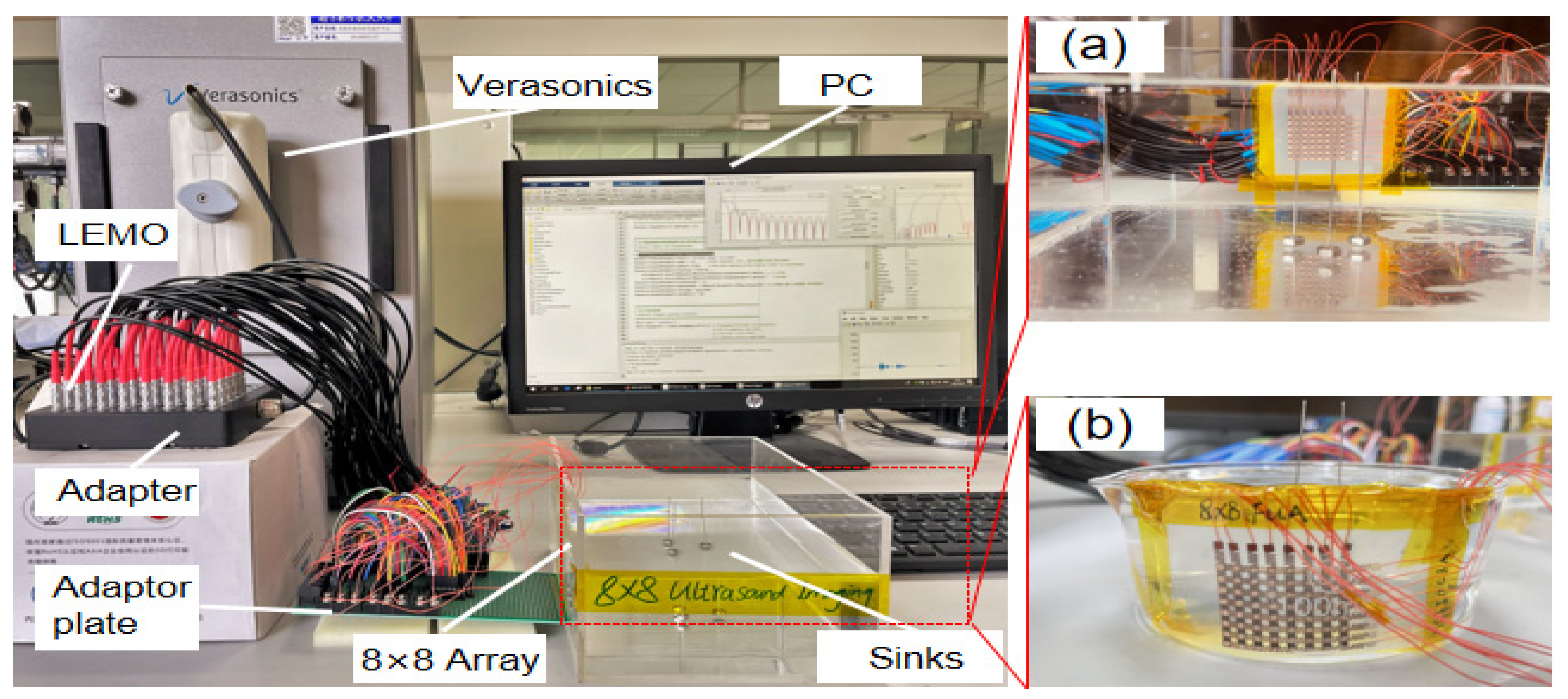
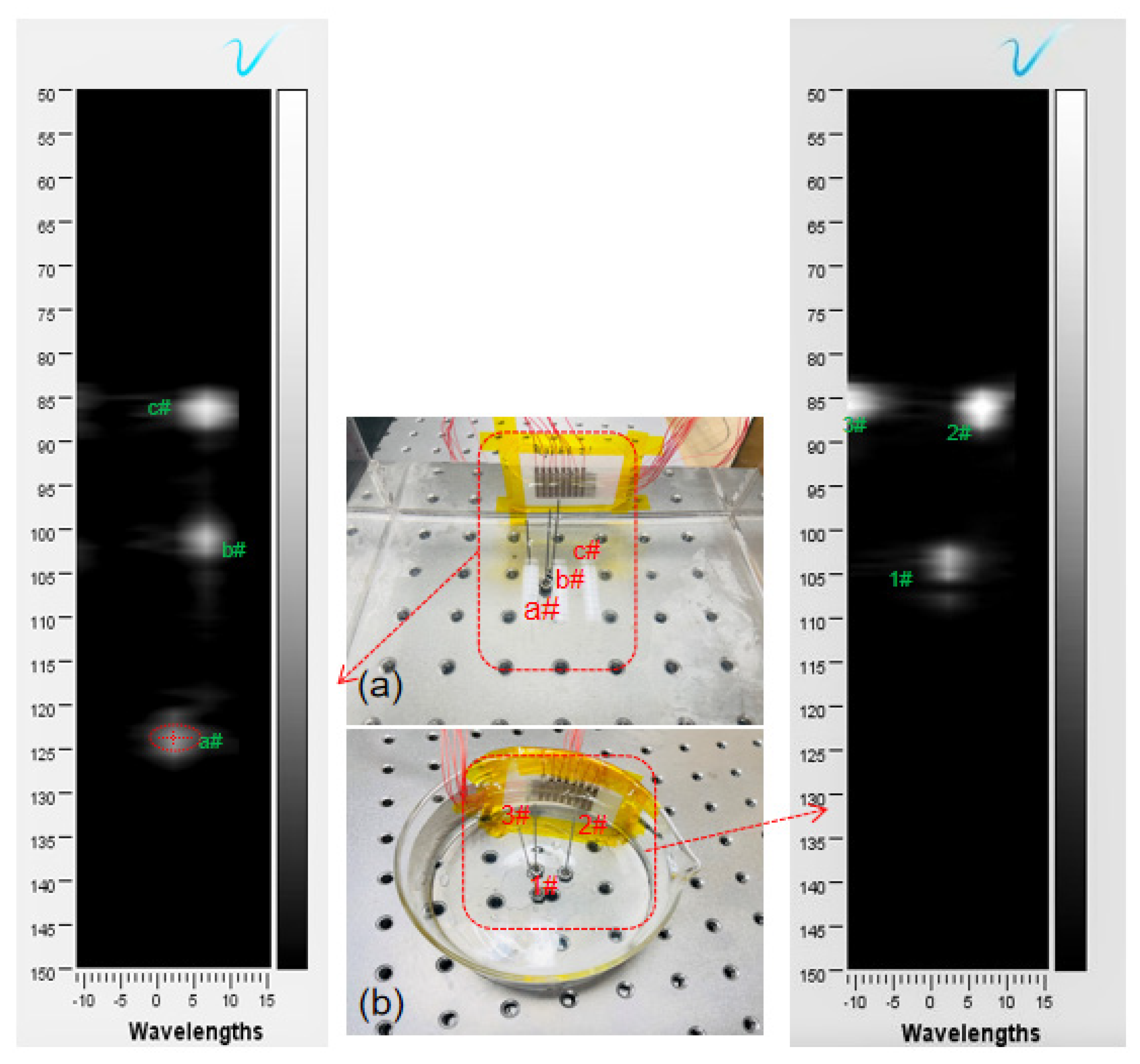
3.3. Curved Surface Imaging Experiment
3.4. Experimental Results and Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Kim, J.; Banks, A.; Cheng, H.; Xie, Z.; Xu, S.; Jang, K.I.; Lee, J.W.; Liu, Z.; Gutruf, P.; Huang, X.; et al. Epidermal electronics with advanced capabilities in near-field communication. Small 2015, 11, 906–912. [Google Scholar] [CrossRef] [PubMed]
- Guemes, A.; Salowitz, N.; Chang, F.K. Trends on research in structural health monitoring. Struct. Health Monit. 2014, 13, 579–580. [Google Scholar]
- Lowe, M.; Alleyne, D.N.; Cawley, P. Defect detection in pipes using guided waves. Ultrasonics 1998, 36, 147–154. [Google Scholar] [CrossRef]
- Schmerr, L.W. Fundamentals of Ultrasonic Nondestructive Evaluation; Springer: Berlin/Heidelberg, Germany, 2016; Volume 122, pp. 85–140. [Google Scholar]
- Davidsen, R.E.; Smith, S.W. Two-dimensional arrays for medical ultrasound using multilayer flexible circuit interconnection. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1998, 45, 338–348. [Google Scholar] [CrossRef]
- Nathan, A.; Ahnood, A.; Cole, M.T.; Lee, S.; Suzuki, Y.; Hiralal, P.; Bonaccorso, F.; Hasan, T.; Garcia-Gancedo, L.; Dyadyusha, A.; et al. Flexible electronics: The next ubiquitous platform. Proc. IEEE 2012, 100, 1486–1517. [Google Scholar] [CrossRef]
- Viviano, S.L.; Chandler, L.K.; Keith, J.D. Ultrahigh frequency ultrasound imaging of the hand: A new diagnostic tool for hand surgery. Hand 2017, 13, 720–725. [Google Scholar] [CrossRef]
- Wang, J.; Zheng, Z.; Chan, J.; Yeow, J. Capacitive micromachined ultrasound transducers for intravascular ultrasound imaging. Microsyst. Nanoeng. 2020, 6, 73. [Google Scholar] [CrossRef]
- Huang, Z.; Hao, Y.; Li, Y.; Hu, H.; Wang, C.; Nomoto, A.; Pan, T.; Gu, Y.; Chen, Y.; Zhang, T.; et al. Three-Dimensional Integrated Stretchable Electronics. Nat. Electron. 2018, 1, 473–480. [Google Scholar] [CrossRef]
- Moehring, M.A.; Myers, T.R. Doppler ultrasound method and apparatus for monitoring blood flow and detecting emboli. J. Acoust. Soc. Am. 2003, 114, 572. [Google Scholar] [CrossRef]
- Kim, D.H.; Ghaffari, R.; Lu, N.; Rogers, J.A. Flexible and stretchable electronics for biointegrated devices. Annu. Rev. Biomed. Eng. 2012, 14, 113–128. [Google Scholar] [CrossRef] [Green Version]
- Hua, Q.; Sun, J.; Liu, H.; Bao, R.; Wang, Z.L. Skin-inspired highly stretchable and conformable matrix networks for multifunctional sensing. Nat. Commun. 2018, 9, 244. [Google Scholar] [CrossRef] [PubMed]
- Hatfield, J.V.; Scales, N.R.; Armitage, A.D.; Hicks, P.J.; Chen, Q.X.; Payne, P.A. An integrated multi-element array transducer for ultrasound imaging. Sens. Actuators A Phys. 1994, 41, 167–173. [Google Scholar] [CrossRef]
- Zhuang, X.; Wygant, I.O.; Yeh, D.T.; Nikoozadeh, A.; Oralkan, O.; Ergun, A.S.; Cheng, C.H.; Huang, Y.; Yaralioglu, G.G.; Khuri-Yakub, B.T. Two-dimensional capacitive micromachined ultrasonic transducer (cmut) arrays for a miniature integrated volumetric ultrasonic imaging system. Proc. SPIE—Int. Soc. Opt. Eng. 2005, 5750, 37–46. [Google Scholar]
- Hammock, M.L.; Chortos, A.; Tee, C.K.; Tok, B.H.; Bao, Z. 25th anniversary article: The evolution of electronic skin (e-skin): A brief history, design considerations, and recent progress. Adv. Mater. 2013, 25, 5997–6038. [Google Scholar] [CrossRef] [PubMed]
- Peng, J.; Li, X.; Tang, H.; Ma, L.; Zhang, T.; Li, Y.; Chen, S. Miniaturized high-resolution integrated 360° electronic radial ultrasound endoscope for digestive tract imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2019, 66, 975–983. [Google Scholar] [CrossRef]
- Khaled, I.; Elmallah, S.; Cheng, C.; Moussa, W.A. A flexible base electrode array for intraspinal microstimulation. IEEE Trans. Biomed. Eng. 2013, 60, 2904–2913. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chi, T.C.; Kang, B.J.; Eliahoo, P.; Abraham, T.; Shung, K.K. Fabrication and characterization of a 20-mhz microlinear phased-array transducer for intervention guidance. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2017, 64, 1261–1268. [Google Scholar] [CrossRef]
- Weng, H.L.; Yao, K.; Chen, S.; Tay, F. Piezoelectric nanotube array for broadband high-frequency ultrasonic transducer. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2018, 65, 457. [Google Scholar]
- Li, G.; Qiu, W.; Zhang, Z.; Jiang, Q.; Su, M.; Cai, R.; Deng, Z.; Xu, D.; Zhang, H. Noninvasive ultrasonic neuromodulation in freely moving mice. IEEE Trans. Biomed. Eng. 2018, 66, 217–224. [Google Scholar] [CrossRef]
- Tanter, M.; Thomas, J.L.; Fink, M. Focusing and steering through absorbing and aberrating layers: Application to ultrasonic propagation through the skull. J. Acoust. Soc. Am. 1998, 103, 2403–2410. [Google Scholar] [CrossRef]
- Chambers, D.H. Analysis of the time-reversal operator for scatterers of finite size. J. Acoust. Soc. Am. 2002, 112, 411–419. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Wang, C.; Huang, Z.; Xu, S. Materials and structures toward soft electronics. Adv. Mater. 2018, 30, 1801368.1–1801368.49. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rogers, J.A.; Xu, S.; Fan, J.A.; Huang, Y.; Zhang, Y. Stretchable Electronic Systems with Containment Chambers. U.S. Patent 10,840,536, 17 November 2020. [Google Scholar]
- Preston, C.; Alvarez, A.; Witte, R.S. Correcting Transcranial Ultrasound Aberrations through Acoustoelectric Derived Time Reversal Operations. In Proceedings of the 2020 IEEE International Ultrasonics Symposium (IUS), Las Vegas, NV, USA, 7–11 September 2020. [Google Scholar]
- Tommiska, O.; Moilanen, P.; Mustonen, J.; Rauhala, T.; Haeggstrm, E. Simulation of Forward Propagated Signals in Acoustic Time Reversal. In Proceedings of the 2019 IEEE International Ultrasonics Symposium (IUS), Glasgow, UK, 6–9 October 2019. [Google Scholar]
- Hu, H.; Zhu, X.; Wang, C.; Zhang, L.; Li, X.; Lee, S.; Huang, Z.; Chen, R.; Chen, Z.; Wang, C.; et al. Stretchable Ultrasonic Transducer Arrays for Three-Dimensional Imaging on Complex Surfaces. Sci. Adv. 2018, 4, eaar3979. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mohan, A.V.; Kim, N.; Gu, Y.; Bandodkar, A.J.; You, J.M.; Kumar, R.; Kurniawan, J.F.; Xu, S.; Wang, J. Merging of Thin-and Thick-Film Fabrication Technologies: Toward Soft Stretchable “Island–Bridge” Devices. Adv. Mater. Technol. 2017, 2, 1600284. [Google Scholar] [CrossRef]
- Liu, W.; Chen, W.; Zhu, C.; Wu, D. Design and micromachining of a stretchable two-dimensional ultrasonic array. Micro Nano Eng. 2021, 13, 100096. [Google Scholar] [CrossRef]
- Mckeighen, R.E. Design guidelines for medical ultrasonic arrays. In Proceedings of the SPIE—The International Society for Optical Engineering, San Jose, CA, USA, 28–29 January 1998; Volume 3341, pp. 2–18. [Google Scholar]
- Shung, K.K.; Zippuro, M. Ultrasonic transducers and arrays. IEEE Eng. Med. Biol. Mag. 1997, 15, 20–30. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Specification |
|---|---|
| Light source | Blue light |
| Scanning mode | Binocular scanning |
| Scanning method | Raster scan |
| Scanning precision | 50 μm |
| Single scanning time | 0~5 s |
| Scan range | 30 × 30 × 30 cm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Liu, W.; Gu, D.; Wu, D. Laser Scanning Guided Localization Imaging with a Laser-Machined Two-Dimensional Flexible Ultrasonic Array. Micromachines 2022, 13, 754. https://doi.org/10.3390/mi13050754
Chen J, Liu W, Gu D, Wu D. Laser Scanning Guided Localization Imaging with a Laser-Machined Two-Dimensional Flexible Ultrasonic Array. Micromachines. 2022; 13(5):754. https://doi.org/10.3390/mi13050754
Chicago/Turabian StyleChen, Jianzhong, Wei Liu, Dianbao Gu, and Dawei Wu. 2022. "Laser Scanning Guided Localization Imaging with a Laser-Machined Two-Dimensional Flexible Ultrasonic Array" Micromachines 13, no. 5: 754. https://doi.org/10.3390/mi13050754
APA StyleChen, J., Liu, W., Gu, D., & Wu, D. (2022). Laser Scanning Guided Localization Imaging with a Laser-Machined Two-Dimensional Flexible Ultrasonic Array. Micromachines, 13(5), 754. https://doi.org/10.3390/mi13050754