
Sound Source Localization Based on Multi-Channel Cross-Correlation Weighted Beamforming

Abstract
:1. Introduction
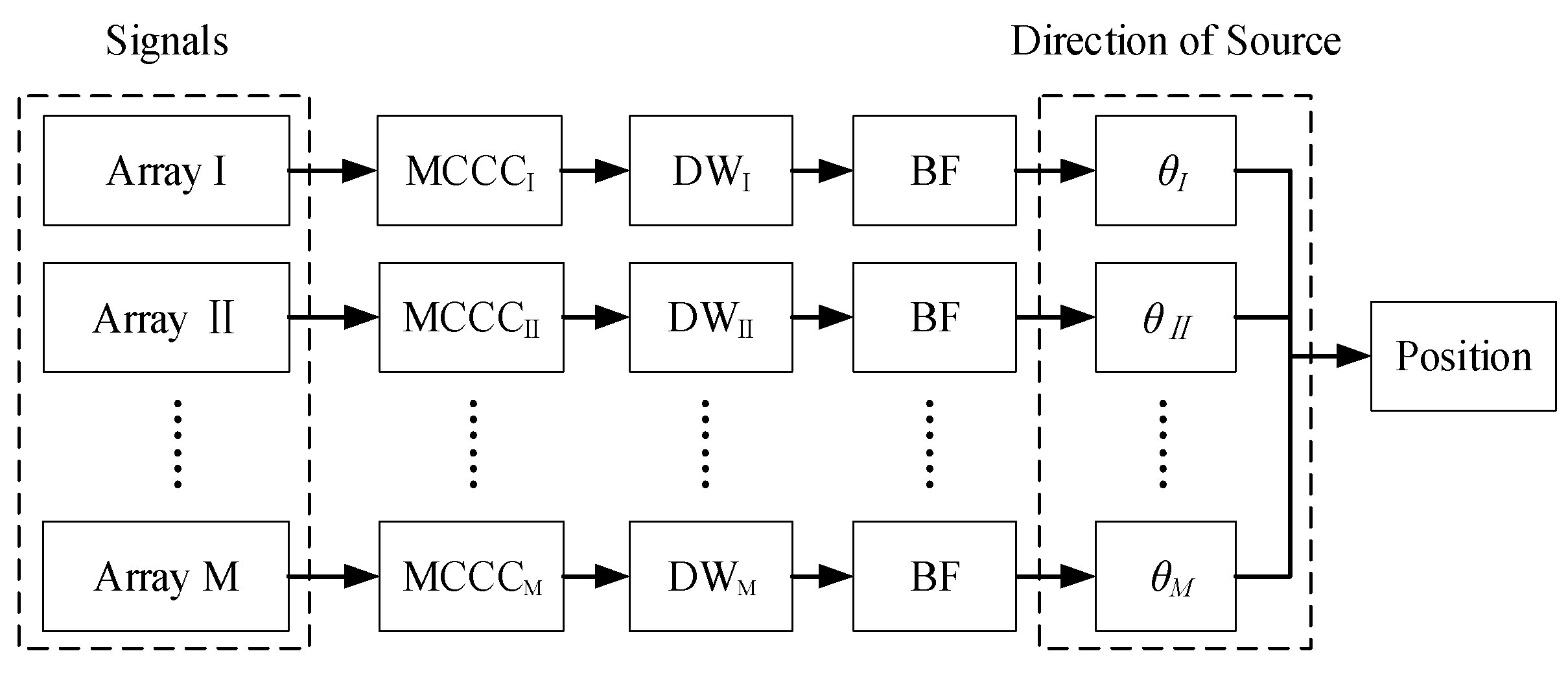
2. Positioning Principle
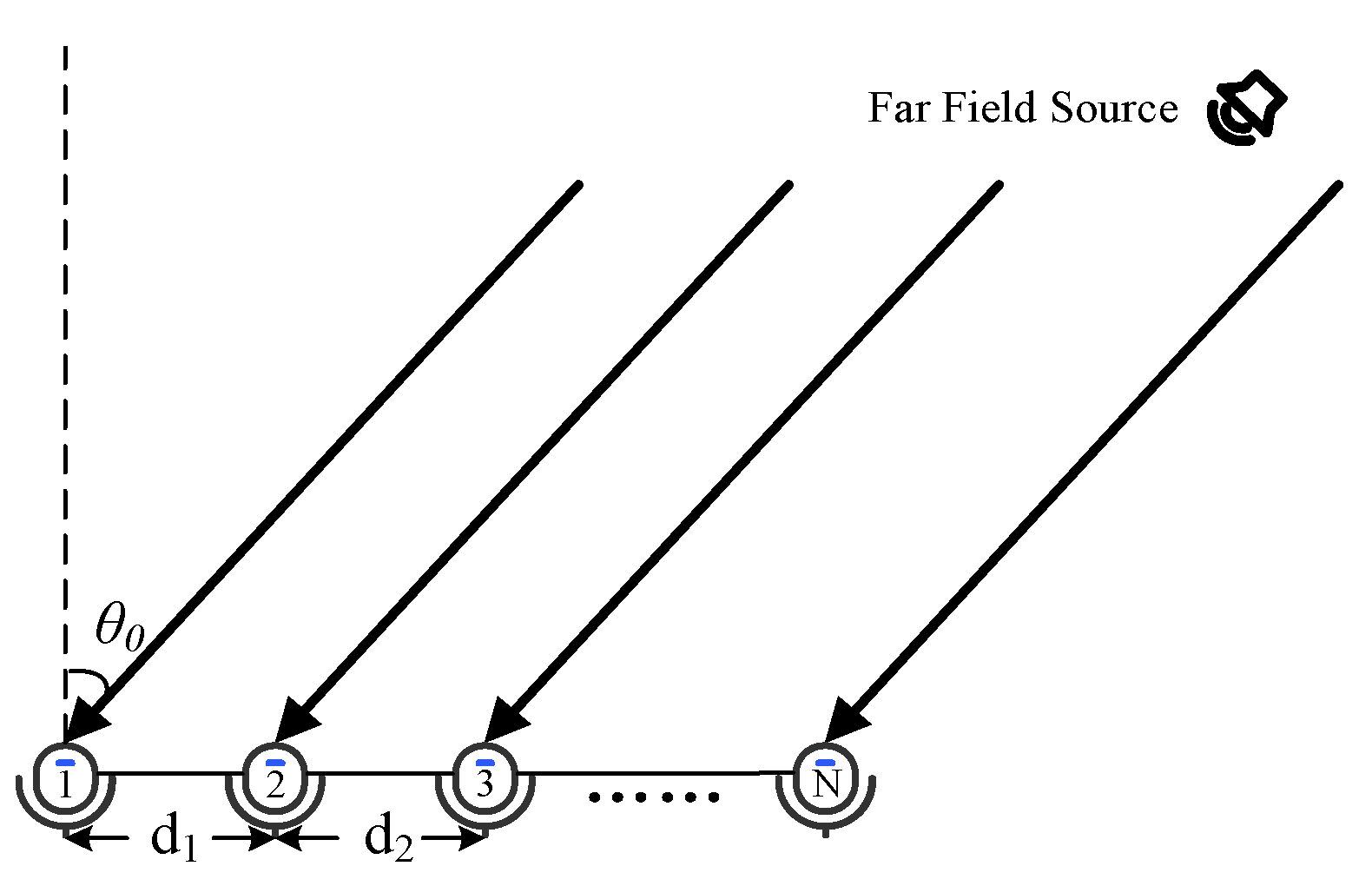
2.1. Signal Model
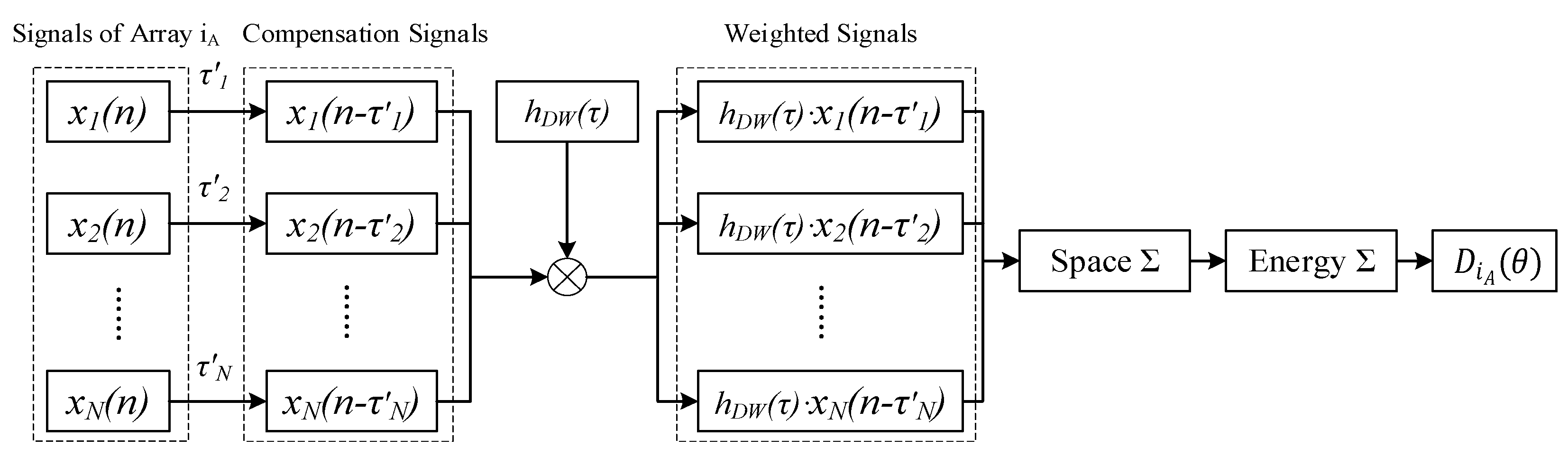
2.2. Direction Weight
2.3. Weighted Beamforming
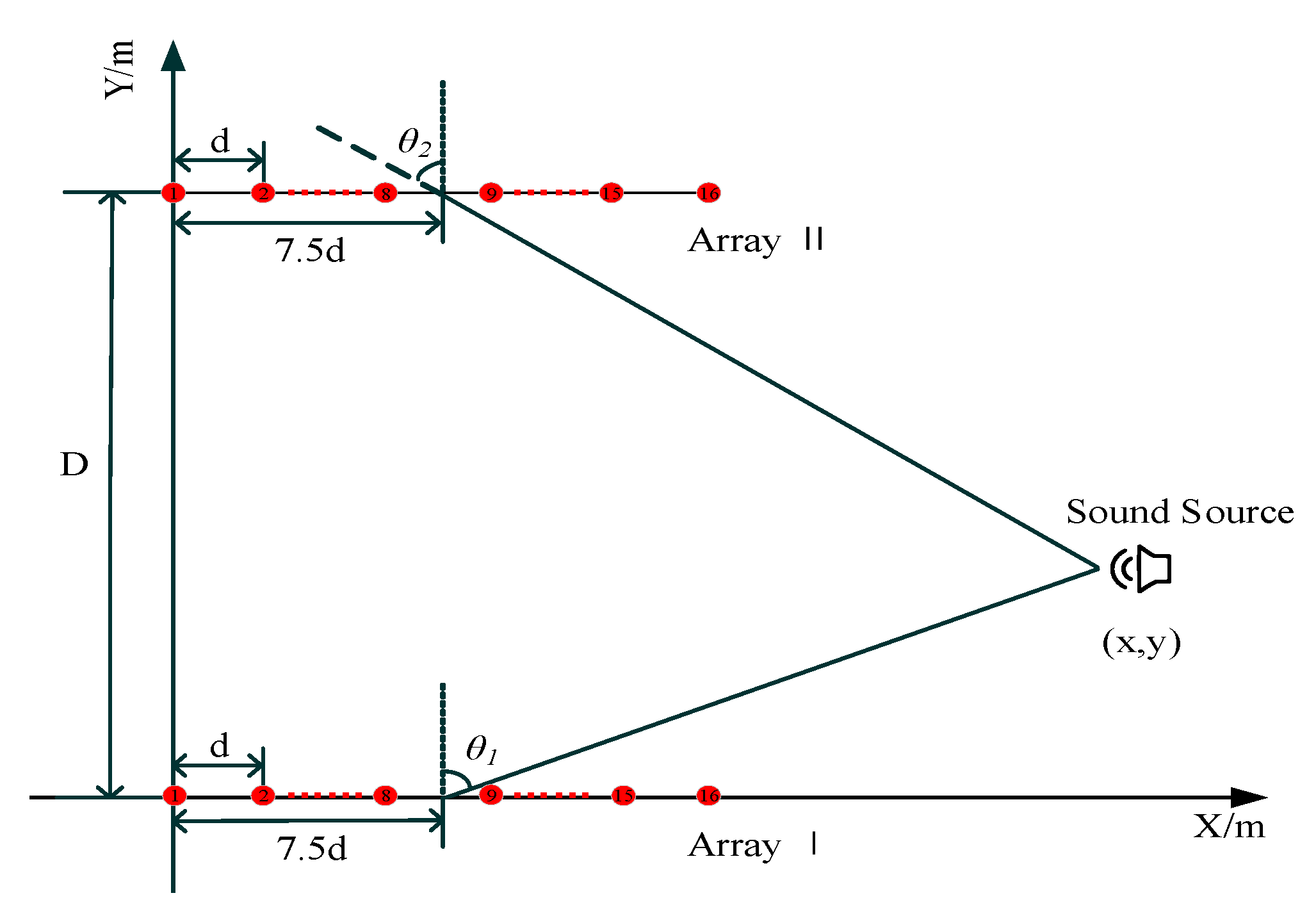
3. Simulation Analysis
4. Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Aich, A.; Palanisamy, P. On-grid DOA estimation method using orthogonal matching pursuit. In Proceedings of the International Conference on Signal Processing and Communications (ICSPC) IEEE, Coimbatore, India, 28–29 July 2017; pp. 483–487. [Google Scholar] [CrossRef] [Green Version]
- Argentieri, S.; Danès, P.; Souères, P. A survey on sound source localization in robotics: From binaural to array processing methods. Comput. Speech Lang. 2015, 34, 87–112. [Google Scholar] [CrossRef] [Green Version]
- Pradhan, D.; Bera, R. Direction of Arrival Estimation via ESPRIT Algorithm for Smart Antenna System. Int. J. Comput. Appl. 2015, 118, 5–7. [Google Scholar] [CrossRef]
- Manamperi, W.; Abhayapala, T.D.; Zhang, J.; Samarasinghe, P.N. Drone audition: Sound source localization using on-board microphones. IEEE/ACM Trans. Audio Speech Lang. Process. 2022, 30, 508–519. [Google Scholar] [CrossRef]
- Kong, D.F.N.; Shen, C.; Tian, C.; Zhang, K. A New Low-Cost Acoustic Beamforming Architecture for Real-Time Marine Sensing: Evaluation and Design. J. Mar. Sci. Eng. 2021, 9, 868. [Google Scholar] [CrossRef]
- Schmidt, R.O. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef] [Green Version]
- Hu, Y.; Abhayapala, T.D.; Samarasinghe, P.N. Multiple source direction of arrival estimations using relative sound pressure based music. IEEE/ACM Trans. Audio Speech Lang. Process. 2020, 29, 253–264. [Google Scholar] [CrossRef]
- Herzog, A.; Habets, E.A.P. Eigenbeam-ESPRIT for DOA-Vector Estimation. IEEE Signal Process. Lett. 2019, 26, 572–576. [Google Scholar] [CrossRef]
- Dvorkind, T.G.; Gannot, S. Time difference of arrival estimation of speech source in a noisy and reverberant environment. Signal Process. 2005, 85, 177–204. [Google Scholar] [CrossRef]
- Chung, M.-A.; Chou, H.-C.; Lin, C.-W. Sound Localization Based on Acoustic Source Using Multiple Microphone Array in an Indoor Environment. Electronics 2022, 11, 890. [Google Scholar] [CrossRef]
- He, H.; Wu, L.; Lu, J.; Qiu, X.; Chen, J. Time Difference of Arrival Estimation Exploiting Multichannel Spatio-Temporal Prediction. IEEE Trans. Audio Speech, Lang. Process. 2012, 21, 463–475. [Google Scholar] [CrossRef]
- Chiariotti, P.; Martarelli, M.; Castellini, P. Acoustic beamforming for noise source localization—Reviews, methodology and applications. Mech. Syst. Signal Process. 2018, 120, 422–448. [Google Scholar] [CrossRef]
- Yang, Y.; Zhigang, C. A Review of High-performance Beamforming Methods for Acoustic Source Identification. Chin. J. Mech. Eng. 2021, 57, 166–183. [Google Scholar] [CrossRef]
- Zhao, Y.; Jensen, J.R.; Jensen, T.L.; Chen, J.; Christensen, M.G. Experimental study of robust acoustic beamforming for speech acquisition in reverberant and noisy environments. Appl. Acoust. 2020, 170, 107531. [Google Scholar] [CrossRef]
- Yang, J.; Liao, G.; Li, J. Robust adaptive beamforming in nested array. Signal Process. 2015, 114, 143–149. [Google Scholar] [CrossRef]
- Padois, T.; Fischer, J.; Doolan, C.; Doutres, O. Acoustic imaging with conventional frequency domain beamforming and generalized cross correlation: A comparison study. Appl. Acoust. 2021, 177, 107914. [Google Scholar] [CrossRef]
- Cobos, M.; Marti, A.; Lopez, J.J. A Modified SRP-PHAT Functional for Robust Real-Time Sound Source Localization With Scalable Spatial Sampling. IEEE Signal Process. Lett. 2010, 18, 71–74. [Google Scholar] [CrossRef]
- Boora, R.; Dhull, S.K. Performance Evaluation of Iterative SRP-PHAT Techniques for Acoustic Source Localization. In Proceedings of the First International Conference on Computational Electronics for Wireless Communication, Singapore, 3 January 2022; Springer: Berlin/Heidelberg, Germany; pp. 403–418. [Google Scholar] [CrossRef]
- Wu, K.; Khong, A.W.H. Acoustic source tracking in reverberant environment using regional steered response power measurement. In Proceedings of the Asia-Pacific Signal and Information Processing Association Annual Summit and Conference, Kaohsiung, Taiwan, 29 October–1 November 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Huang, J.; Jin, N.; Wang, L.; Chen, X.; Sheng, X.; Yang, S.; Zhao, X.; Sun, L.; Zhu, M. Acoustic Source Localization with Distributed Smartphone Arrays. In Proceedings of the 2015 IEEE Global Com-munications Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Diaz-Guerra, D.; Miguel, A.; Beltran, J.R. Robust Sound Source Tracking Using SRP-PHAT and 3D Convolutional Neural Networks. IEEE/ACM Trans. Audio Speech Lang. Process. 2020, 29, 300–311. [Google Scholar] [CrossRef]
- Salvati, D.; Drioli, C.; Foresti, G.L. Sensitivity-based region selection in the steered response power algorithm. Signal Process. 2018, 153, 1–10. [Google Scholar] [CrossRef]
- Dunn, O.J.; Clark, V.A. Applied Statistics: Analysis of Variance and Regression; John Wiley and Sons, Inc.: Hoboken, NJ, USA, 1986. [Google Scholar] [CrossRef]
- Rezayee, A.; Gazor, S. An adaptive KLT approach for speech enhancement. IEEE Trans. Speech Audio Process. 2001, 9, 87–95. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SNR/dB | SRP-PHAT | SRP-MCCC | ||||
|---|---|---|---|---|---|---|
| Position/m | Directional Deviation/° | Distance Error/% | Position/m | Directional Deviation/° | Distance Error/% | |
| 10 | (14.25, 3.94) | (−0.36, 0.12) | 1.77 | (13.96, 4.00) | (0.04, −0.08) | 0.27 |
| 0 | (14.27, 3.86) | (−0.46, −0.28) | 2.09 | (14.19, 3.96) | (−0.26, −0.03) | 1.33 |
| −5 | (15.24, 3.84) | (−1.76, 1.12) | 8.59 | (13.78, 3.90) | (−0.11, −0.83) | 1.66 |
| −10 | (12.59, 4.10) | (1.59, −2.03) | 9.71 | (14.31, 4.13) | (0.24, 0.87) | 2.31 |
| −15 | (15.61, 4.06) | (−1.33, 2.29) | 11.06 | (13.48, 4.10) | (1.01, −0.46) | 3.64 |
| −20 | (16.14, 4.07) | (−1.76, 3.02) | 14.71 | (14.57, 4.26) | (0.49, 1.57) | 4.30 |
| Source Location/m | SRP-PHAT | SRP-MCCC | ||||
|---|---|---|---|---|---|---|
| Position/m | Directional Deviation/° | Distance Error/% | Position/m | Directional Deviation/° | Distance Error/% | |
| (12, 7) | (10.96, 6.62) | (1.28, −3.53) | 8.81 | (12.22, 6.79) | (−0.96, −0.84) | 2.19 |
| (15, 6) | (16.26, 6.18) | (1.41, 1.11) | 7.88 | (15.52, 6.03) | (−0.46, 0.51) | 3.22 |
| (17, 4.5) | (18.27, 4.04) | (−2.34, −0.23) | 7.51 | (17.47, 4.60) | (−0.02, 0.85) | 2.73 |
| (19, 6.5) | (20.99, 6.84) | (0.78, 1.87) | 10.05 | (19.81, 6.92) | (0.46, 1.58) | 4.05 |
| (21, 5) | (21.21, 4.15) | (1.08, −0.63) | 8.83 | (21.52, 4.90) | (−0.62, 0.50) | 2.45 |
| Frequency/Hz | SRP-PHAT | SRP-MCCC | ||||
|---|---|---|---|---|---|---|
| Position/m | Directional Deviation/° | Distance Error/% | Position/m | Directional Deviation/° | Distance Error/% | |
| 600 | (13.59, 5.09) | (2.21, −1.52) | 8.93 | (14.61, 5.09) | (0.81, −0.16) | 2.53 |
| 600, 900 | (16.17, 5.21) | (−0.62, 2.00) | 7.52 | (15.41, 5.13) | (−0.03, 0.92) | 2.72 |
| 600, 900, 1500 | (13.68, 5.08) | (2.03, −1.42) | 8.36 | (14.73, 5.23) | (1.15, 0.50) | 2.24 |
| Source Location/m | SRP-PHAT | SRP-MCCC | |||||
|---|---|---|---|---|---|---|---|
| Direction/° | Position/m | Error/% | Direction/° | Position/m | Error/% | ||
| (10, 5) | (−64.16, 64.16) | (−65.60, 66.08) | (11.14, 4.80) | 10.35 | (−64.99, 64.18) | (10.20, 4.91) | 1.96 |
| (11, 2) | (−79.98, 54.76) | (−81.94, 55.73) | (11.83, 1.72) | 7.83 | (−79.11, 54.75) | (10.81, 2.13) | 2.06 |
| (12, 7.5) | (−58.67, 78.53) | (−61.77, 79.12) | (13.39, 7.36) | 12.62 | (−59.52, 78.26) | (12.24, 7.39) | 2.36 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, M.; Hu, J.; Zeng, Q.; Jian, Z.; Nie, L. Sound Source Localization Based on Multi-Channel Cross-Correlation Weighted Beamforming. Micromachines 2022, 13, 1010. https://doi.org/10.3390/mi13071010
Liu M, Hu J, Zeng Q, Jian Z, Nie L. Sound Source Localization Based on Multi-Channel Cross-Correlation Weighted Beamforming. Micromachines. 2022; 13(7):1010. https://doi.org/10.3390/mi13071010
Chicago/Turabian StyleLiu, Mengran, Junhao Hu, Qiang Zeng, Zeming Jian, and Lei Nie. 2022. "Sound Source Localization Based on Multi-Channel Cross-Correlation Weighted Beamforming" Micromachines 13, no. 7: 1010. https://doi.org/10.3390/mi13071010
APA StyleLiu, M., Hu, J., Zeng, Q., Jian, Z., & Nie, L. (2022). Sound Source Localization Based on Multi-Channel Cross-Correlation Weighted Beamforming. Micromachines, 13(7), 1010. https://doi.org/10.3390/mi13071010