
Design of a Cylindrical Compliant Linear Guide with Decoupling Parallelogram Mechanisms



Abstract
:1. Introduction
- The design of a compliant linear guide (i.e., a decoupled linear guide) that has an improved bearing-direction stiffness without sacrificing its linear stiffness along the motion direction, which is based on connecting decoupling mechanisms to the detached linear guide.
- The comparison of the static stiffness along each axis of decoupled linear guide and that of the detached linear guide via nonlinear FEA simulations.
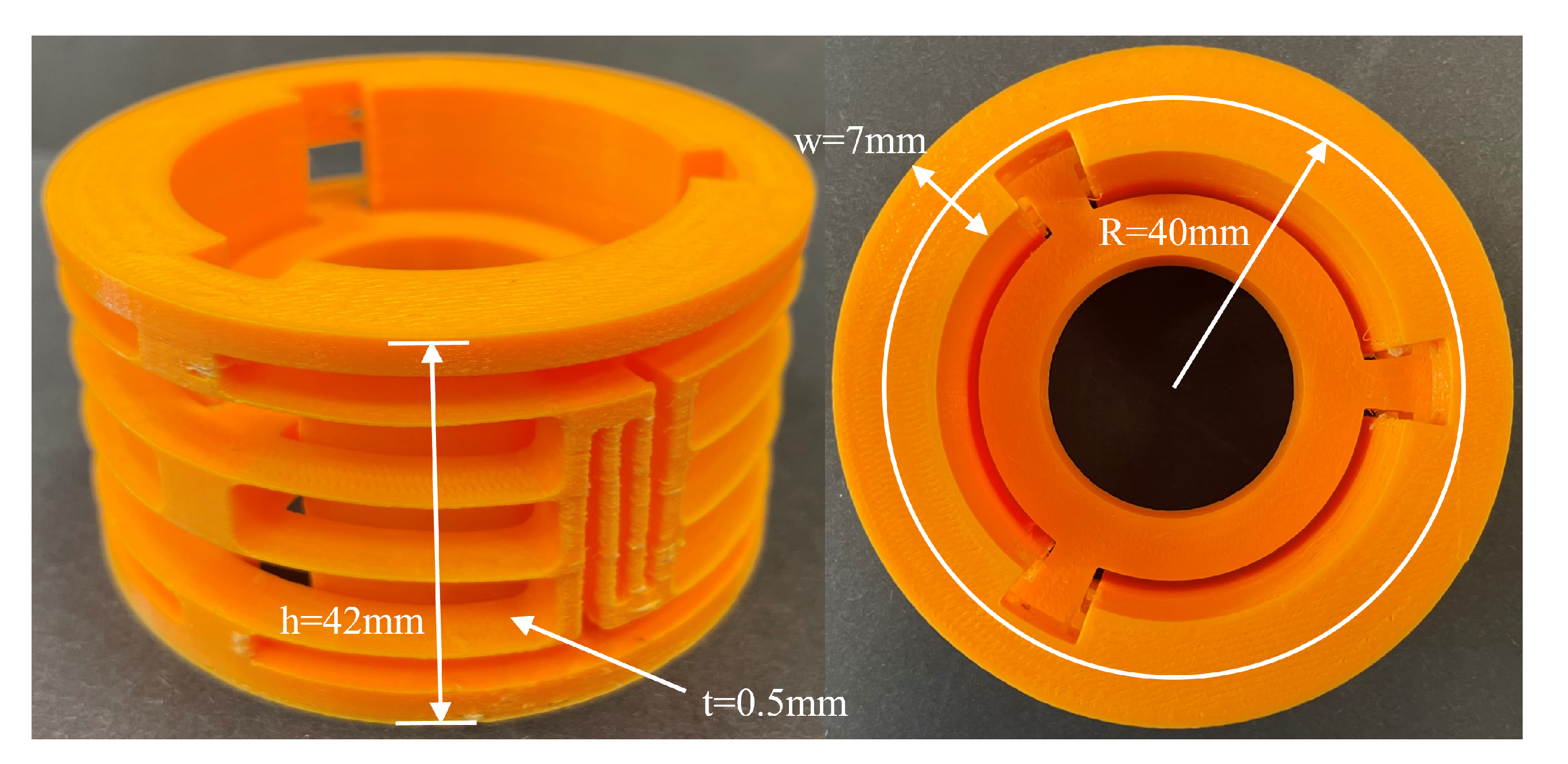
- A static experimental test conducted on a 3D printed prototype to verify the linear stiffness along the motion direction.
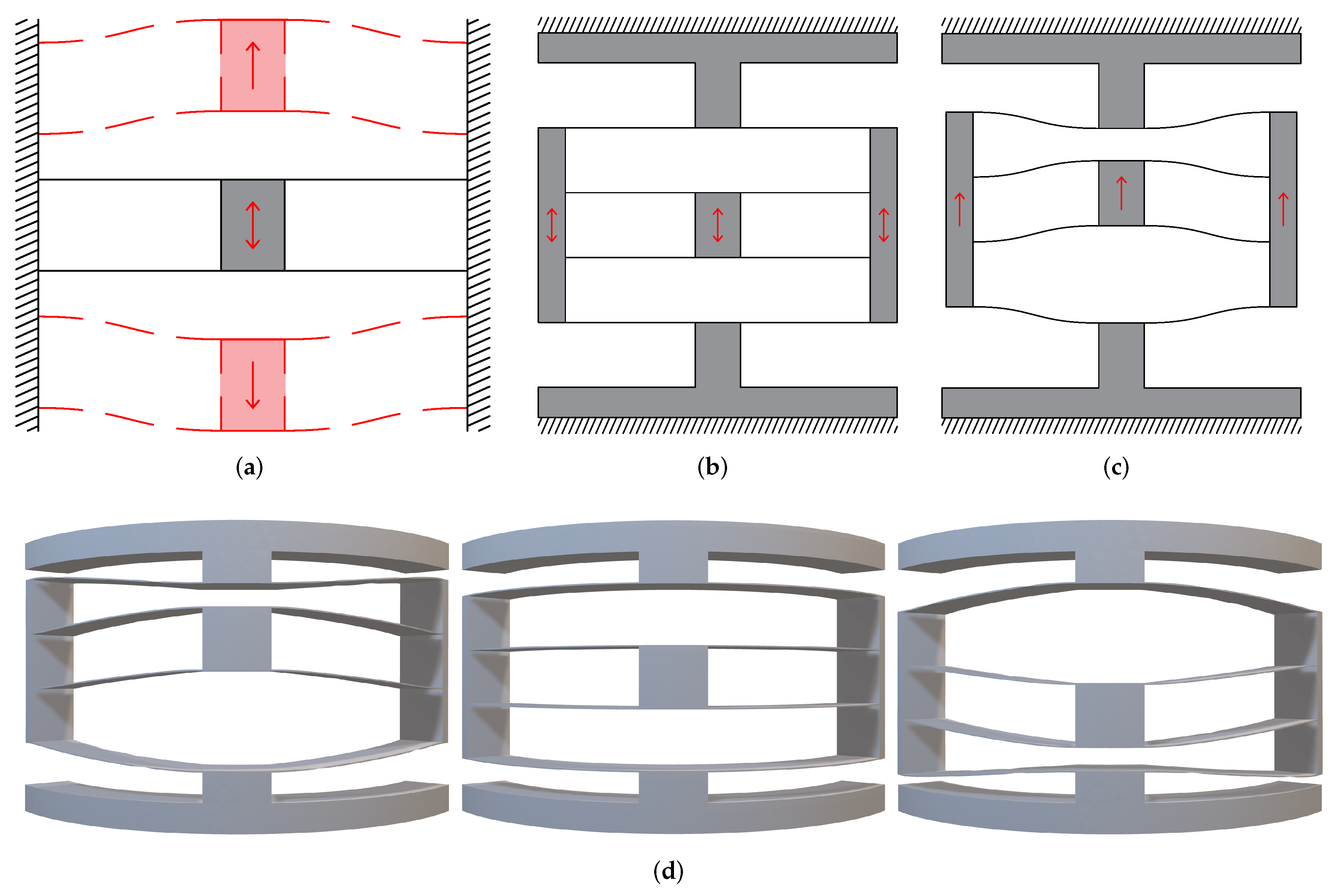
2. Structural Design of Decoupled Linear Guide
3. Analysis and Optimization
3.1. Nonlinear Stiffness Analysis
3.2. Parametric Optimization
4. Prototype and Experiment
5. Discussion
- First, compared with the conventional slide rail guides [2], the cylindrical shape of the decoupled linear guide makes it more suitable to use than these conventional linear guides in certain scenarios, such as voice coil actuators and electromagnetic energy harvesting. The cylindrical shape ensures the target moving platform moves along its motion direction and avoids wear and friction. The decoupled linear guide has the benefits of lower maintenance costs, high positioning precision and repeatability.
- The decoupled linear guide has a smaller footprint than the spatial diaphragm mechanism [28]. This is because the compliant beams are arranged in a vertical direction instead of a distribution along the radial direction. Furthermore, the decoupled linear guide has higher bearing-direction stiffness than the diaphragm mechanism, which contributes to higher motion precision under payload in bearing directions.
- Compared with the folded leaf springs with torsion reinforcement structures [23], the decoupled linear guide benefits from its simple structure in terms of manufacturing. The application of the decoupling mechanism to improve the bearing-direction stiffness is a different method compared to the use of torsion reinforcement structures for the same motivation.
- Compared to the detached linear guide [29], the primary advantage of the decoupled linear guide is the higher bearing-direction stiffness. They have the same footprint and symmetry.
6. Conclusions
- The decoupled linear guide had higher stiffness compared with the detached linear guide in all the bearing directions during deformation.
- As proved from nonlinear FEA, the stiffness degradation of the detached linear guide was addressed by adding the decoupling mechanisms.
- A prototype of the decoupled linear guide was manufactured where the stiffness in its motion direction was 1.0073 N/mm. The stiffness derived from the nonlinear FEA result was 1.1162 N/mm. The error between the FEA and experimental results was 9.76%.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Li, R.; Yang, Z.; Cai, B.; Chen, G.; Wu, B.; Wei, Y. A compliant guiding mechanism utilizing orthogonally oriented flexures with enhanced stiffness in degrees-of-constraint. Mech. Mach. Theory 2022, 167, 104555. [Google Scholar] [CrossRef]
- Sato, K.; Nakamoto, K.; Shimokohbe, A. Practical control of precision positioning mechanism with friction. Precis. Eng. 2004, 28, 426–434. [Google Scholar] [CrossRef]
- Hao, G. Determinate design and analytical analysis of a class of symmetrical flexure guiding mechanisms for linear actuators. J. Mech. Des. 2017, 139, 012301. [Google Scholar] [CrossRef]
- Howell, L.L. Compliant Mechanisms; John Wiley & Sons: New York, NY, USA, 2001. [Google Scholar]
- Howell, L.L.; Magleby, S.P.; Olsen, B.M. Handbook of Compliant Mechanisms; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Frecker, M.I.; Dziedzic, R.; Haluck, R. Design of multifunctional compliant mechanisms for minimally invasive surgery. Minim. Invasive Ther. Allied Technol. 2002, 11, 311–319. [Google Scholar] [CrossRef]
- Yoneyama, T.; Watanabe, T.; Kagawa, H.; Hamada, J.; Hayashi, Y.; Nakada, M. Force detecting gripper and flexible micro manipulator for neurosurgery. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 6695–6699. [Google Scholar]
- Hu, Y.; Zhang, L.; Li, W.; Yang, G.Z. Design and fabrication of a 3-D printed metallic flexible joint for snake-like surgical robot. IEEE Robot. Autom. Lett. 2019, 4, 1557–1563. [Google Scholar] [CrossRef]
- Cronin, J.A.; Frecker, M.I.; Mathew, A. Design of a compliant endoscopic suturing instrument. J. Med. Devices 2008, 2, 025002. [Google Scholar] [CrossRef]
- George B, L.; Bharanidaran, R. Design of compliant gripper for surgical applications. Aust. J. Mech. Eng. 2022, 20, 256–262. [Google Scholar] [CrossRef]
- Gu, X.; Li, C.; Xiao, X.; Lim, C.M.; Ren, H. A compliant transoral surgical robotic system based on a parallel flexible mechanism. Ann. Biomed. Eng. 2019, 47, 1329–1344. [Google Scholar] [CrossRef]
- Hao, G.; Kong, X. A novel large-range XY compliant parallel manipulator with enhanced out-of-plane stiffness. J. Mech. Des. Trans. ASME 2012, 134, 061009. [Google Scholar] [CrossRef]
- Wu, H.; Lai, L.; Zhang, L.; Zhu, L. A novel compliant XY micro-positioning stage using bridge-type displacement amplifier embedded with Scott-Russell mechanism. Precis. Eng. 2022, 73, 284–295. [Google Scholar] [CrossRef]
- Liang, H.; Hao, G.; Olszewski, O.Z.; Pakrashi, V. Ultra-low wide bandwidth vibrational energy harvesting using a statically balanced compliant mechanism. Int. J. Mech. Sci. 2022, 219, 107130. [Google Scholar] [CrossRef]
- Yamomo, G.; Hossain, N.; Towfighian, S.; Willing, R. Design and analysis of a compliant 3D printed energy harvester housing for knee implants. Med. Eng. Phys. 2021, 88, 59–68. [Google Scholar] [CrossRef] [PubMed]
- Berdy, D.F.; Srisungsitthisunti, P.; Jung, B.; Xu, X.; Rhoads, J.F.; Peroulis, D. Low-frequency meandering piezoelectric vibration energy harvester. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2012, 59, 846–858. [Google Scholar] [CrossRef] [PubMed]
- Jin, L.; Khajehtourian, R.; Mueller, J.; Rafsanjani, A.; Tournat, V.; Bertoldi, K.; Kochmann, D.M. Guided transition waves in multistable mechanical metamaterials. Proc. Natl. Acad. Sci. USA 2020, 117, 2319–2325. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, K.; Sigmund, O.; Du, J. Design of metamaterial mechanisms using robust topology optimization and variable linking scheme. Struct. Multidiscip. Optim. 2021, 63, 1975–1988. [Google Scholar] [CrossRef]
- Lee, T.U.; Chen, Y.; Heitzmann, M.T.; Gattas, J.M. Compliant curved-crease origami-inspired metamaterials with a programmable force-displacement response. Mater. Des. 2021, 207, 109859. [Google Scholar] [CrossRef]
- Masters, N.D.; Howell, L.L. A self-retracting fully compliant bistable micromechanism. J. Microelectromech. Syst. 2003, 12, 273–280. [Google Scholar] [CrossRef]
- Wittwer, J.W.; Baker, M.S.; Howell, L.L. Simulation, measurement, and asymmetric buckling of thermal microactuators. Sens. Actuators A Phys. 2006, 128, 395–401. [Google Scholar] [CrossRef]
- Sano, P.; Verotti, M.; Bosetti, P.; Belfiore, N.P. Kinematic synthesis of a d-drive mems device with rigid-body replacement method. J. Mech. Des. 2018, 140, 075001. [Google Scholar] [CrossRef]
- Rommers, J.; Naves, M.; Brouwer, D.; Herder, J.L. A flexure-based linear guide with torsion reinforcement structures. J. Mech. Robot. 2022, 14, 031013. [Google Scholar] [CrossRef]
- Hao, G.; He, X.; Awtar, S. Design and analytical model of a compact flexure mechanism for translational motion. Mech. Mach. Theory 2019, 142, 103593. [Google Scholar] [CrossRef]
- Hao, G.; Li, H. Nonlinear analytical modeling and characteristic analysis of a class of compound multibeam parallelogram mechanisms. J. Mech. Robot. 2015, 7, 041016. [Google Scholar] [CrossRef]
- Hubbard, N.B.; Wittwer, J.W.; Kennedy, J.A.; Wilcox, D.L.; Howell, L.L. A novel fully compliant planar linear-motion mechanism. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Salt Lake City, UT, USA, 28 September–2 October 2004; Volume 46954, pp. 1–5. [Google Scholar]
- Brouwer, D.M.; Otten, A.; Engelen, J.; Krijnen, B.; Soemers, H. Long-range elastic guidance mechanisms for electrostatic comb-drive actuators. In Proceedings of the EUSPEN International Conference, Delft, The Netherlands, 31 May–4 June 2010. [Google Scholar]
- Awtar, S.; Slocum, A. Flexure systems based on a symmetric diaphragm flexure. In Proceedings of the ASPE 2005 Annual Meeting, Norfolk, VA, USA, 9–14 October 2005. [Google Scholar]
- Yang, M.; Zhang, C.; Huang, X.; Chen, S.L.; Yang, G. A Long Stroke Nanopositioning Stage with Annular Flexure Guides. IEEE/ASME Trans. Mechatron. 2021, 27, 1570–1581. [Google Scholar] [CrossRef]
- Awtar, S.; Mariappan, D.D. Experimental measurement of the bearing characteristics of straight-line flexure mechanisms. Precis. Eng. 2017, 49, 1–14. [Google Scholar] [CrossRef]
- Wu, K.; Zheng, G.; Hao, G. Efficient spatial compliance analysis of general initially curved beams for mechanism synthesis and optimization. Mech. Mach. Theory 2021, 162, 104343. [Google Scholar] [CrossRef]
- Hao, G.; Li, H. Extended static modeling and analysis of compliant compound parallelogram mechanisms considering the initial internal axial force. J. Mech. Robot. 2016, 8, 041008. [Google Scholar] [CrossRef]
- Hao, G.; Li, H.; He, X.; Kong, X. Conceptual design of compliant translational joints for high-precision applications. Front. Mech. Eng. 2014, 9, 331–343. [Google Scholar] [CrossRef]
- Ultimaker. Ultimaker PLA Technical Data Sheet; v2.00; Ultimaker: Utrecht, The Netherlands, 2022. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Linear Stiffness in Motion Direction | Alleviated Bearing-Direction Stiffness Reduction | Symmetrical Design for Eliminating Parasitic Motion | Compactness | Simple Manufacturing | |
|---|---|---|---|---|---|
| Decoupled Linear Guide | ✓ | ✓ | ✓ | ✓ | ✓ |
| Spatial Diaphragm [28] | ✓ | ✓ | |||
| Folded leaf springs [23] | ✓ | ✓ | ✓ | ||
| Detached Linear Guide [29] | ✓ | ✓ | ✓ | ✓ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, T.; Hao, G. Design of a Cylindrical Compliant Linear Guide with Decoupling Parallelogram Mechanisms. Micromachines 2022, 13, 1275. https://doi.org/10.3390/mi13081275
Liu T, Hao G. Design of a Cylindrical Compliant Linear Guide with Decoupling Parallelogram Mechanisms. Micromachines. 2022; 13(8):1275. https://doi.org/10.3390/mi13081275
Chicago/Turabian StyleLiu, Tinghao, and Guangbo Hao. 2022. "Design of a Cylindrical Compliant Linear Guide with Decoupling Parallelogram Mechanisms" Micromachines 13, no. 8: 1275. https://doi.org/10.3390/mi13081275
APA StyleLiu, T., & Hao, G. (2022). Design of a Cylindrical Compliant Linear Guide with Decoupling Parallelogram Mechanisms. Micromachines, 13(8), 1275. https://doi.org/10.3390/mi13081275