
Implementation of a Sponge-Based Flexible Electronic Skin for Safe Human–Robot Interaction

 ,
,  ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Design of the Electronic Skin Structure
2.2. Fabrication Processes of the Electronic Skin
3. Results and Discussion
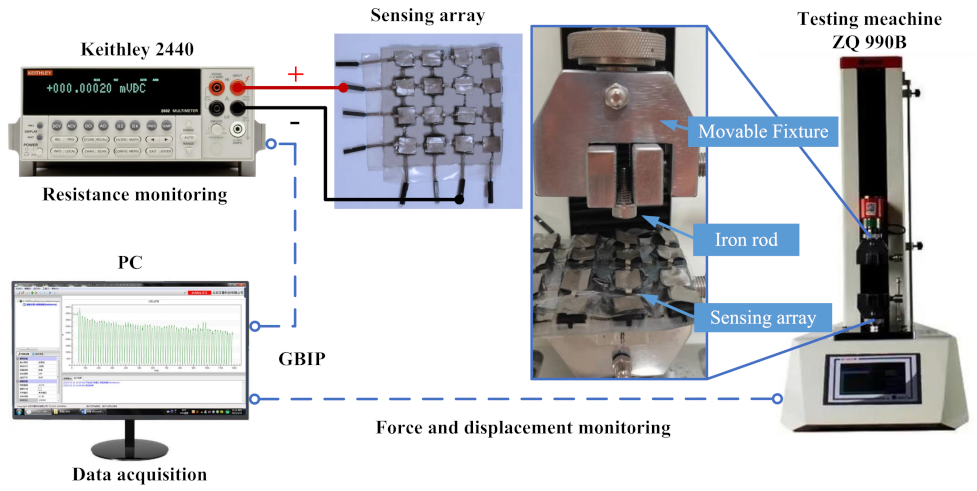
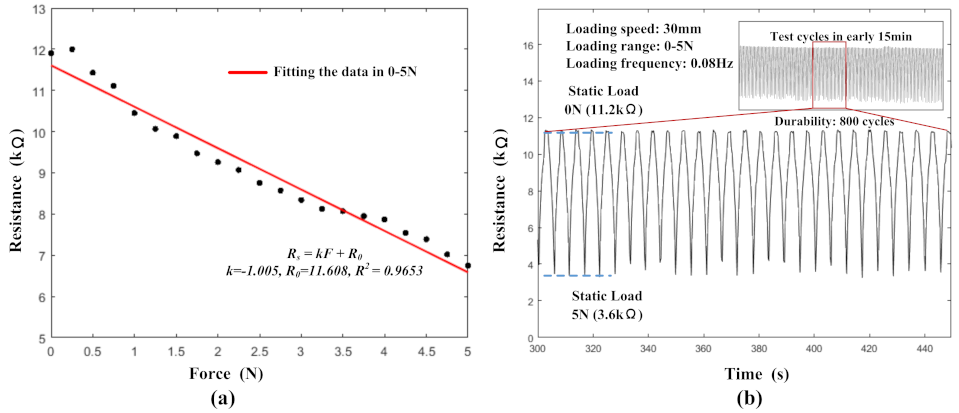
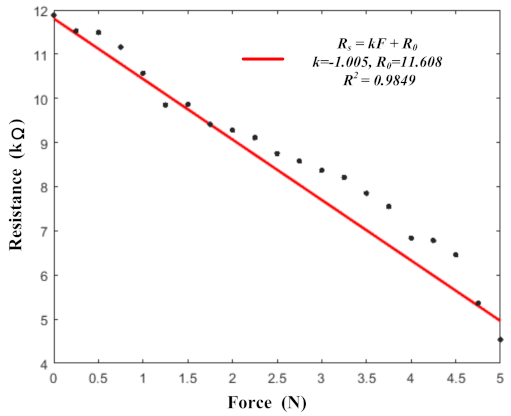
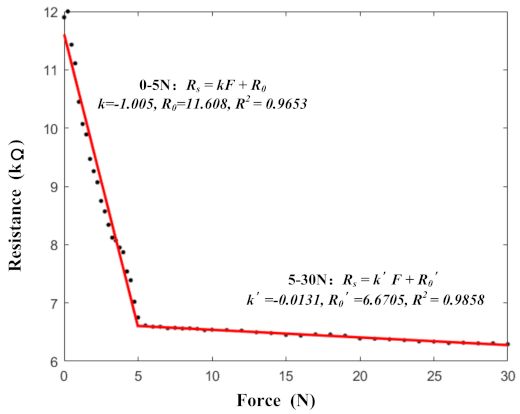
3.1. Calibration of the Electronic Skin
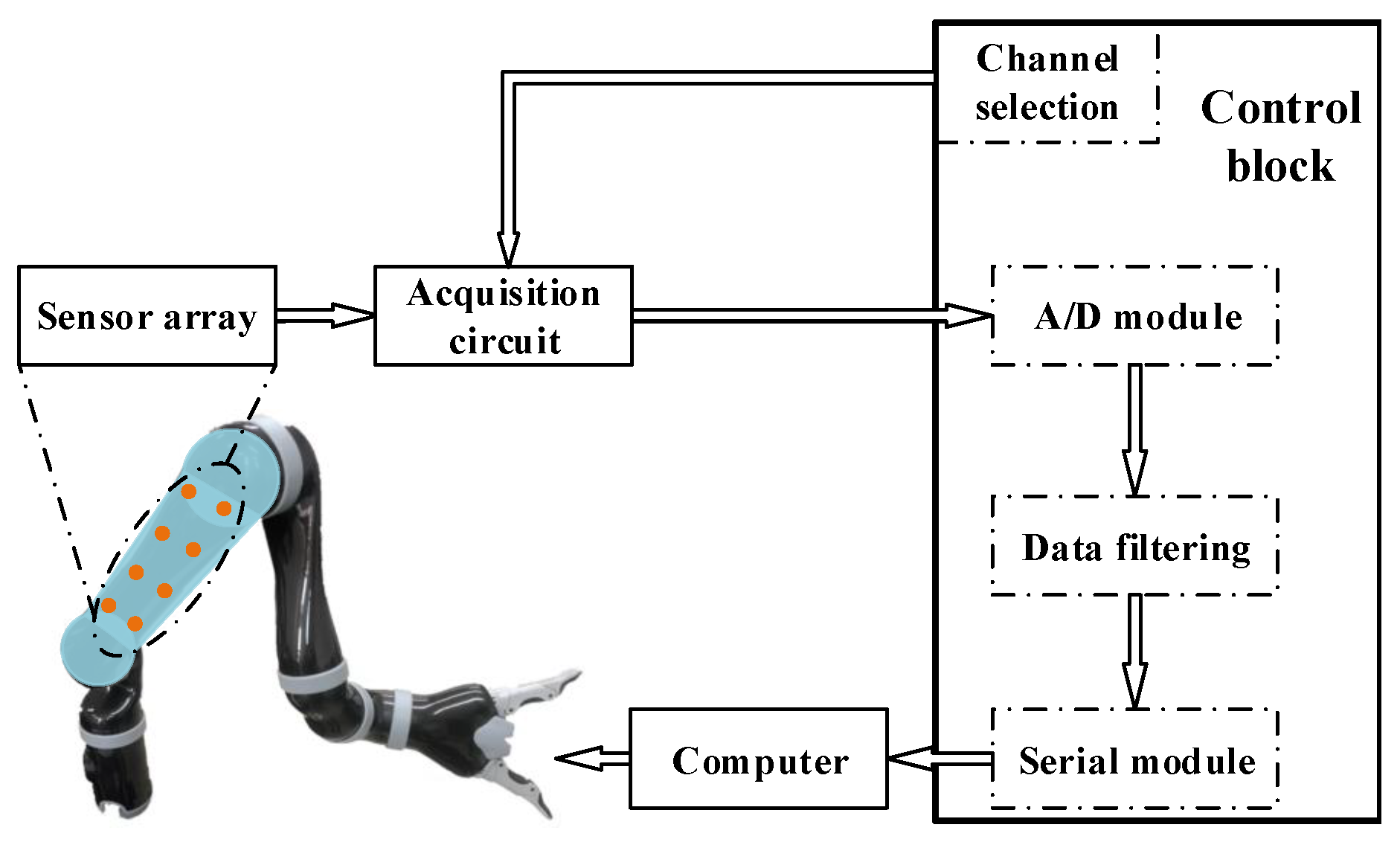
3.2. Design of the Tactile Acquisition System
3.3. Response of the Tactile Sensor Array
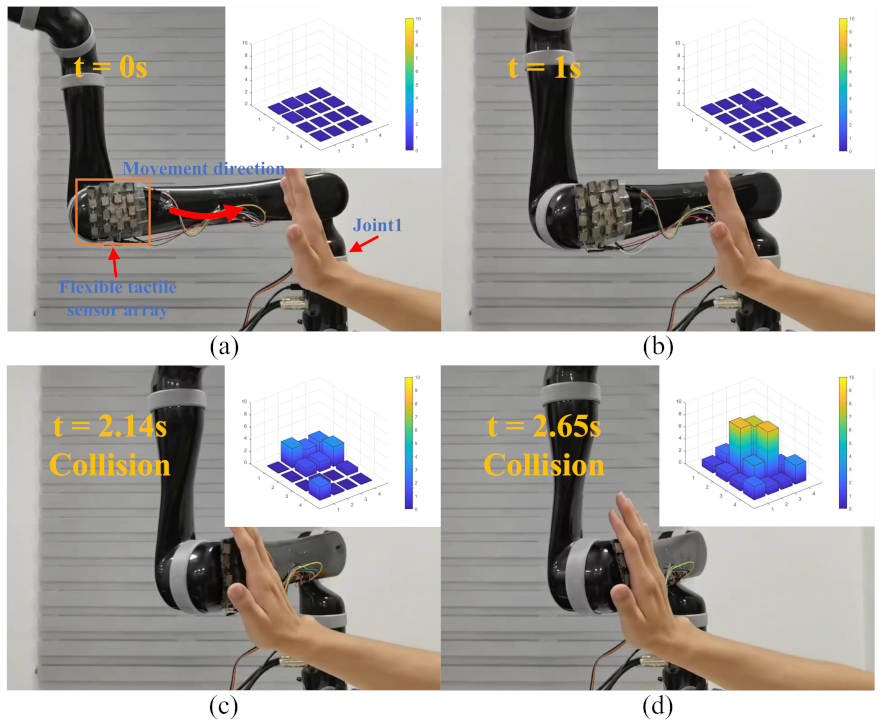
3.4. Human–Robot Interaction Experiments
3.5. Discussion
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Robla-Gómez, S.; Becerra, V.M.; Llata, J.R.; Gonzalez-Sarabia, E.; Torre-Ferrero, C.; Perez-Oria, J. Working together: A review on safe human-robot collaboration in industrial environments. IEEE Access 2017, 5, 26754–26773. [Google Scholar] [CrossRef]
- Vasic, M.; Billard, A. Safety issues in human-robot interactions. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 197–204. [Google Scholar]
- Zacharaki, A.; Kostavelis, I.; Gasteratos, A.; Dokas, I. Safety bounds in human robot interaction: A survey. Saf. Sci. 2020, 127, 104667. [Google Scholar] [CrossRef]
- Zanchettin, A.M.; Ceriani, N.M.; Rocco, P.; Ding, H.; Matthias, B. Safety in human-robot collaborative manufacturing environments: Metrics and control. IEEE Trans. Autom. Sci. Eng. 2015, 13, 882–893. [Google Scholar] [CrossRef]
- Kinova Jaco Assistive Robotic Arm. Available online: https://www.kinovarobotics.com/en/assistive-technologies/column-a1/kinova-assistive-robotic-arm (accessed on 24 May 2019).
- Haddadin, S.; Albu-Schäffer, A.; Hirzinger, G. Requirements for safe robots: Measurements, analysis and new insights. Int. J. Robot. Res. 2009, 28, 1507–1527. [Google Scholar] [CrossRef]
- De Luca, A.; Mattone, R. Actuator failure detection and isolation using generalized momenta. In Proceedings of the 2003 IEEE international conference on robotics and automation (cat. No. 03CH37422), Taipei, Taiwan, 14–19 September 2003; Volume 1, pp. 634–639. [Google Scholar]
- De Luca, A.; Albu-Schaffer, A.; Haddadin, S.; Hirzinger, G. Collision detection and safe reaction with the DLR-III lightweight manipulator arm. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 1623–1630. [Google Scholar]
- De Luca, A.; Flacco, F. Integrated control for pHRI: Collision avoidance, detection, reaction and collaboration. In Proceedings of the 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Rome, Italy, 24–27 June 2012; pp. 288–295. [Google Scholar] [CrossRef]
- Fan, J.; Zheng, P.; Li, S. Vision-based holistic scene understanding towards proactive human–robot collaboration. Robot. Comput.-Integr. Manuf. 2022, 75, 102304. [Google Scholar] [CrossRef]
- Chen, L.; Yang, H.; Liu, P. Intelligent robot arm: Vision-based dynamic measurement system for industrial applications. In Proceedings of the International Conference on Intelligent Robotics and Applications, Shenyang, China, 8–11 August 2019; pp. 120–130. [Google Scholar]
- Song, K.T.; Chang, Y.H.; Chen, J.H. 3D vision for object grasp and obstacle avoidance of a collaborative robot. In Proceedings of the 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Hong Kong, China, 8–12 July 2019; pp. 254–258. [Google Scholar]
- Carvajal, I.; Martínez-García, E.A.; Lavrenov, R.; Magid, E. Robot arm planning and control by τ-Jerk theory and vision-based recurrent ANN observer. In Proceedings of the 2021 International Siberian Conference on Control and Communications (SIBCON), Kazan, Russia, 13–15 May 2021; pp. 1–6. [Google Scholar]
- Scimmi, L.S.; Melchiorre, M.; Mauro, S.; Pastorelli, S.P. Implementing a vision-based collision avoidance algorithm on a UR3 Robot. In Proceedings of the 2019 23rd International Conference on Mechatronics Technology (ICMT), Salerno, Italy, 23–26 October 2019; pp. 1–6. [Google Scholar]
- Roberts, P.; Zadan, M.; Majidi, C. Soft Tactile Sensing Skins for Robotics. Curr. Robot. Rep. 2021, 2, 343–354. [Google Scholar] [CrossRef]
- Someya, T.; Sekitani, T.; Iba, S.; Kato, Y.; Kawaguchi, H.; Sakurai, T. A large-area, flexible pressure sensor matrix with organic field-effect transistors for artificial skin applications. Proc. Natl. Acad. Sci. USA 2004, 101, 9966–9970. [Google Scholar] [CrossRef] [PubMed]
- Yamada, Y.; Morizono, T.; Umetani, Y.; Takahashi, H. Highly soft viscoelastic robot skin with a contact object-location-sensing capability. IEEE Trans. Ind. Electron. 2005, 52, 960–968. [Google Scholar] [CrossRef]
- Pang, G.; Yang, G.; Heng, W.; Ye, Z.; Huang, X.; Yang, H.Y.; Pang, Z. CoboSkin: Soft robot skin with variable stiffness for safer human–robot collaboration. IEEE Trans. Ind. Electron. 2020, 68, 3303–3314. [Google Scholar] [CrossRef]
- Saadatzi, M.N.; Baptist, J.R.; Yang, Z.; Popa, D.O. Modeling and fabrication of scalable tactile sensor arrays for flexible robot skins. IEEE Sens. J. 2019, 19, 7632–7643. [Google Scholar] [CrossRef]
- Yan, Y.; Hu, Z.; Yang, Z.; Yuan, W.; Song, C.; Pan, J.; Shen, Y. Soft magnetic skin for super-resolution tactile sensing with force self-decoupling. Sci. Robot. 2021, 6, eabc8801. [Google Scholar] [CrossRef] [PubMed]
- Ji, Z.; Zhu, H.; Liu, H.; Liu, N.; Chen, T.; Yang, Z.; Sun, L. The design and characterization of a flexible tactile sensing array for robot skin. Sensors 2016, 16, 2001. [Google Scholar] [CrossRef] [PubMed]
- Weichart, J.; Ott, M.; Burger, T.; Hierold, C. Towards Artificial Robotic Skin: Highly Sensitive Flexible Tactile Sensing Arrays with 3D Sensing Capabilities. In Proceedings of the 2022 IEEE 35th International Conference on Micro Electro Mechanical Systems Conference (MEMS), Tokyo, Japan, 9–13 January 2022; pp. 67–70. [Google Scholar]
- Pang, G.; Deng, J.; Wang, F.; Zhang, J.; Pang, Z.; Yang, G. Development of flexible robot skin for safe and natural human–robot collaboration. Micromachines 2018, 9, 576. [Google Scholar] [CrossRef] [PubMed]
- Wu, H.; Zheng, B.; Wang, H.; Ye, J. New Flexible Tactile Sensor Based on Electrical Impedance Tomography. Micromachines 2022, 13, 185. [Google Scholar] [CrossRef] [PubMed]
- Shi, Y.; Lü, X.; Zhao, J.; Wang, W.; Meng, X.; Wang, P.; Li, F. Flexible Capacitive Pressure Sensor Based on Microstructured Composite Dielectric Layer for Broad Linear Range Pressure Sensing Applications. Micromachines 2022, 13, 223. [Google Scholar] [CrossRef] [PubMed]
- Teyssier, M.; Parilusyan, B.; Roudaut, A.; Steimle, J. Human-like artificial skin sensor for physical human-robot interaction. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 3626–3633. [Google Scholar]
- Zhang, Y.; Ye, J.; Lin, Z.; Huang, S.; Wang, H.; Wu, H. A Piezoresistive Tactile Sensor for a Large Area Employing Neural Network. Sensors 2019, 19, 27. [Google Scholar] [CrossRef] [PubMed]
- Lü, X.; Yang, J.; Qi, L.; Bao, W.; Zhao, L.; Chen, R. High Sensitivity Flexible Electronic Skin Based on Graphene Film. Sensors 2019, 19, 794. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.; Su, Z.; Song, Y.; Cheng, X.; Chen, X.; Meng, B.; Song, Z.; Chen, D.; Zhang, H. Omnidirectional bending and pressure sensor based on stretchable CNT-PU sponge. Adv. Funct. Mater. 2017, 27, 1604434. [Google Scholar] [CrossRef]
- Yu, T.; Zhang, D.; Wu, Y.; Guo, S.; Lei, F.; Li, Y.; Yang, J. Graphene foam pressure sensor based on fractal electrode with high sensitivity and wide linear range. Carbon 2021, 182, 497–505. [Google Scholar] [CrossRef]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, K.; Xia, X.; Zhang, F.; Ma, H.; Sang, S.; Zhang, Q.; Ji, J. Implementation of a Sponge-Based Flexible Electronic Skin for Safe Human–Robot Interaction. Micromachines 2022, 13, 1344. https://doi.org/10.3390/mi13081344
Yang K, Xia X, Zhang F, Ma H, Sang S, Zhang Q, Ji J. Implementation of a Sponge-Based Flexible Electronic Skin for Safe Human–Robot Interaction. Micromachines. 2022; 13(8):1344. https://doi.org/10.3390/mi13081344
Chicago/Turabian StyleYang, Kun, Xinkai Xia, Fan Zhang, Huanzhou Ma, Shengbo Sang, Qiang Zhang, and Jianlong Ji. 2022. "Implementation of a Sponge-Based Flexible Electronic Skin for Safe Human–Robot Interaction" Micromachines 13, no. 8: 1344. https://doi.org/10.3390/mi13081344
APA StyleYang, K., Xia, X., Zhang, F., Ma, H., Sang, S., Zhang, Q., & Ji, J. (2022). Implementation of a Sponge-Based Flexible Electronic Skin for Safe Human–Robot Interaction. Micromachines, 13(8), 1344. https://doi.org/10.3390/mi13081344