
Pressure-Driven Perfusion System to Control, Multiplex and Recirculate Cell Culture Medium for Organs-on-Chips

 , , ,
, , ,
Abstract
:1. Introduction
2. Experimental
2.1. Theoretical Model
2.2. Fluidic Circuit Board
2.3. Controlled Perfusion and Recirculation
3. Materials and Methods
3.1. Fabrication of the Fluidic Circuit Board
3.2. Fabrication of Microfluidic Devices
3.3. Assembly of the Perfusion System
3.4. Pressure Controllers
3.5. Flow Sensors
3.6. Pressure Sensors
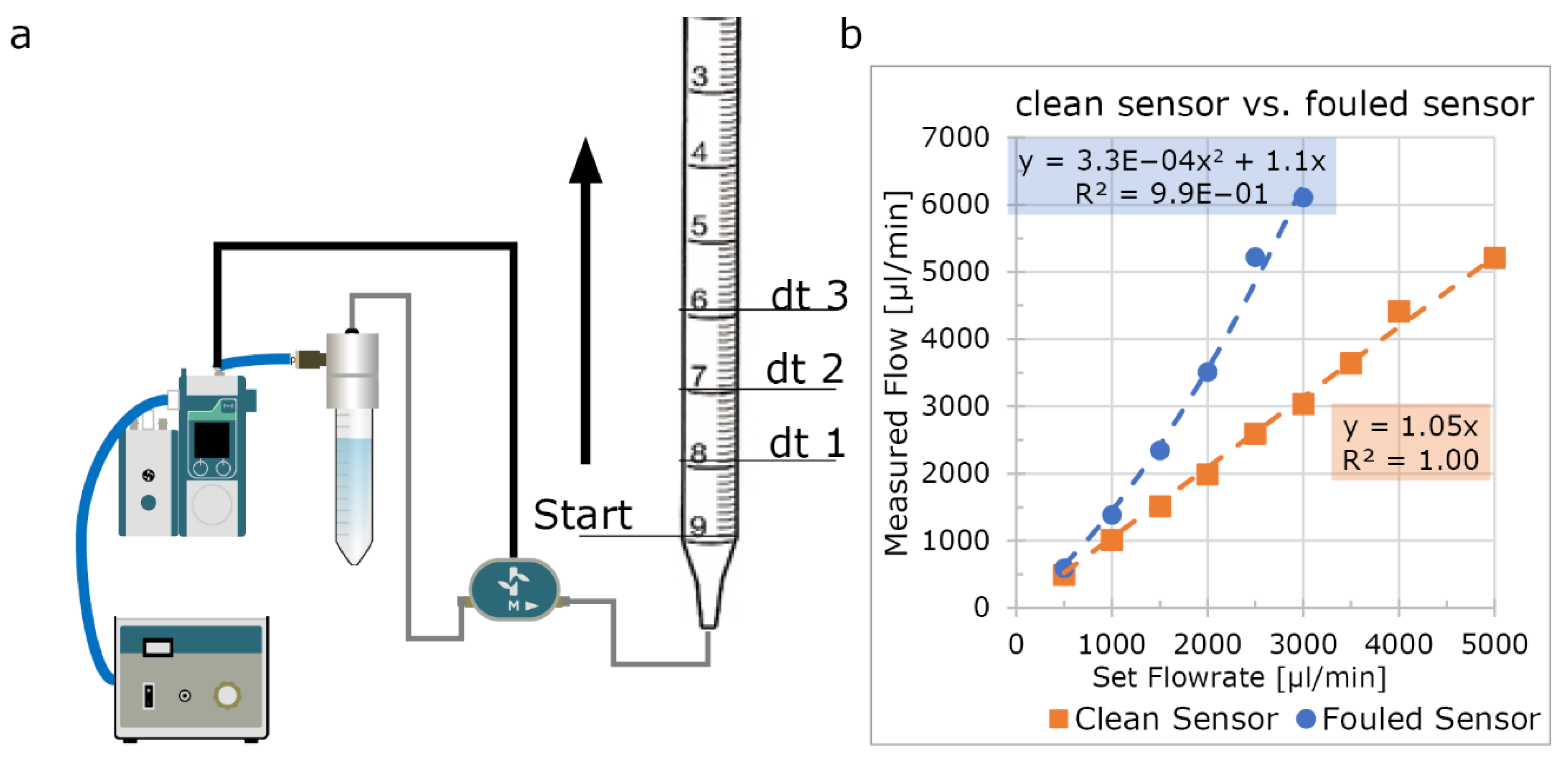
3.7. Flow Rate Sensor Validation
3.8. Liquid Level Measurement
3.9. Graetz Recirculation Circuit Validation
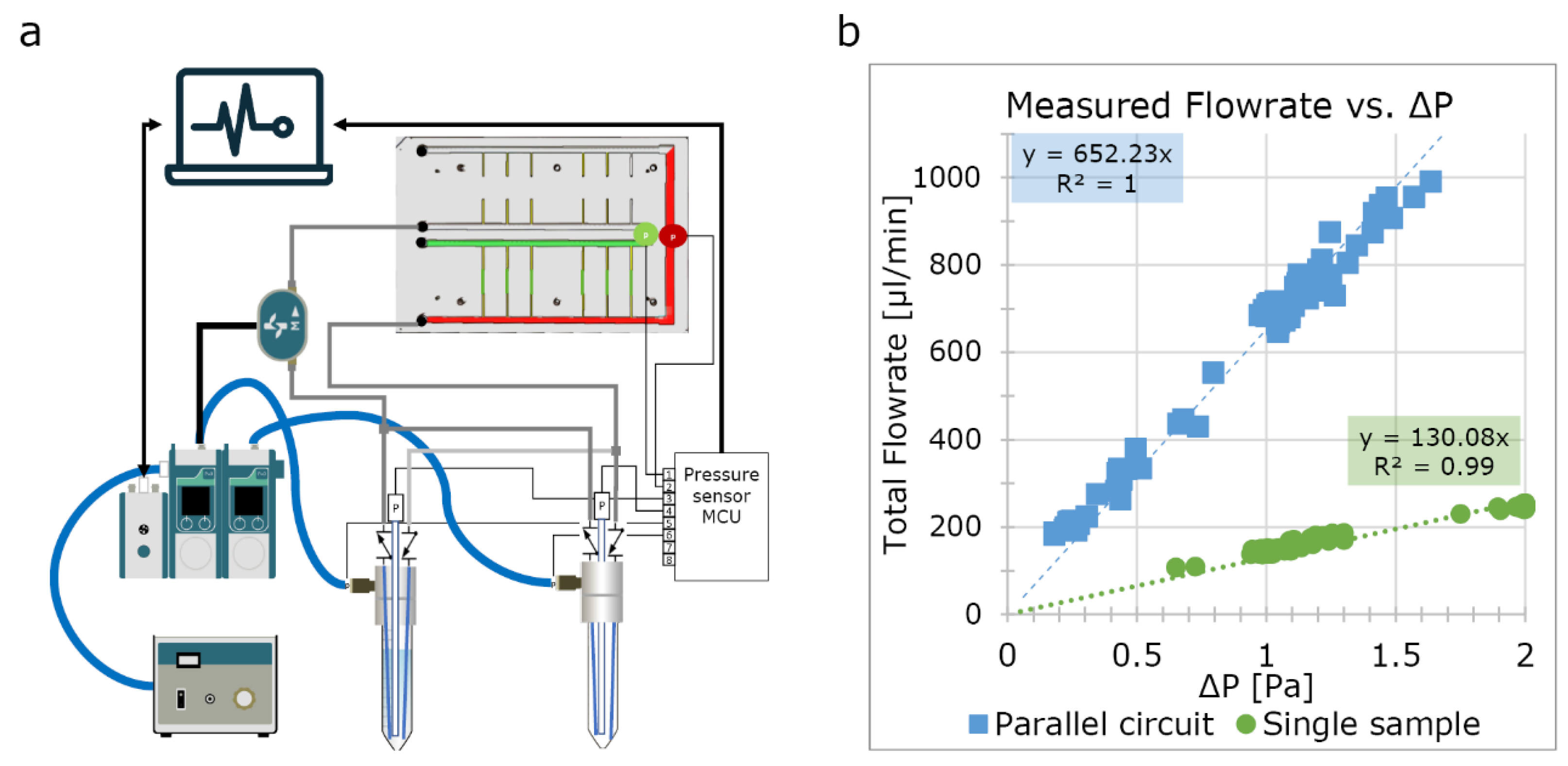
3.10. Validation of Flow Rate Control Using Applied dP
3.11. Long-Term Perfusion
3.12. Code Availability
4. Results and Discussion
4.1. Design Perfusion Platform
4.2. Characterization of Pressure Controllers and Flow Rate Sensors
4.3. Liquid Level Measurement
4.4. Recirculation Using the Graetz-Recirculation Circuit
5. Current Limitations of the Presented System
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ingber, D.E. Human organs-on-chips for disease modelling, drug development and personalized medicine. Nat. Rev. Genet. 2022, 23, 467–491. [Google Scholar] [CrossRef]
- Bhatia, S.N.; Ingber, D.E. Microfluidic organs-on-chips. Nat. Biotechnol. 2014, 32, 760–772. [Google Scholar] [CrossRef] [PubMed]
- Wu, Q.; Liu, J.; Wang, X.; Feng, L.; Wu, J.; Zhu, X.; Wen, W.; Gong, X. Organ-on-a-chip: Recent breakthroughs and future prospects. Biomed. Eng. Online 2020, 19, 9. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Junaid, A.; Mashaghi, A.; Hankemeier, T.; Vulto, P. An end-user perspective on Organ-on-a-Chip: Assays and usability aspects. Curr. Opin. Biomed. Eng. 2017, 1, 15–22. [Google Scholar] [CrossRef]
- Busek, M.; Aizenshtadt, A.; Amirola-Martinez, M.; Delon, L.; Krauss, S. Academic User View: Organ-on-a-Chip Technology. Biosensors 2022, 12, 126. [Google Scholar] [CrossRef]
- Thompson, C.L.; Fu, S.; Heywood, H.K.; Knight, M.M.; Thorpe, S.D. Corrigendum: Mechanical Stimulation: A Crucial Element of Organ-on-Chip Models. Front. Bioeng. Biotechnol. 2021, 9, 658873. [Google Scholar] [CrossRef]
- Pradhan, S.; Banda, O.A.; Farino, C.J.; Sperduto, J.L.; Keller, K.A.; Taitano, R.; Slater, J.H. Biofabrication Strategies and Engineered In Vitro Systems for Vascular Mechanobiology. Adv. Healthc. Mater. 2020, 9, e1901255. [Google Scholar] [CrossRef]
- Dessalles, C.A.; Leclech, C.; Castagnino, A.; Barakat, A.I. Integration of substrate- and flow-derived stresses in endothelial cell mechanobiology. Commun. Biol. 2021, 4, 764. [Google Scholar] [CrossRef]
- Byun, C.K.; Abi-Samra, K.; Cho, Y.K.; Takayama, S. Pumps for microfluidic cell culture. Electrophoresis 2014, 35, 245–257. [Google Scholar] [CrossRef] [Green Version]
- van Duinen, V.; van den Heuvel, A.; Trietsch, S.J.; Lanz, H.L.; van Gils, J.M.; van Zonneveld, A.J.; Vulto, P.; Hankemeier, T. 96 perfusable blood vessels to study vascular permeability in vitro. Sci. Rep. 2017, 7, 18071. [Google Scholar] [CrossRef]
- Wang, Y.I.; Abaci, H.E.; Shuler, M.L. Microfluidic blood-brain barrier model provides in vivo-like barrier properties for drug permeability screening. Biotechnol. Bioeng. 2017, 114, 184–194. [Google Scholar] [CrossRef] [PubMed]
- Ni, C.W.; Qiu, H.; Jo, H. MicroRNA-663 upregulated by oscillatory shear stress plays a role in inflammatory response of endothelial cells. Am. J. Physiol. Heart Circ. Physiol. 2011, 300, H1762–H1769. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, C.; Baker, B.M.; Chen, C.S.; Schwartz, M.A. Endothelial cell sensing of flow direction. Arterioscler. Thromb. Vasc. Biol. 2013, 33, 2130–2136. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, Y.I.; Shuler, M.L. UniChip enables long-term recirculating unidirectional perfusion with gravity-driven flow for microphysiological systems. Lab Chip 2018, 18, 2563–2574. [Google Scholar] [CrossRef]
- Kaarj, K.; Yoon, J.Y. Methods of Delivering Mechanical Stimuli to Organ-on-a-Chip. Micromachines 2019, 10, 700. [Google Scholar] [CrossRef] [Green Version]
- Weiss, M.; Neff, T.; Gerber, A.; Fischer, J. Impact of infusion line compliance on syringe pump performance. Pediatric Anesth. 2000, 10, 595–599. [Google Scholar] [CrossRef]
- Klespitz, J.; Kovács, L. Peristaltic pumps—A review on working and control possibilities. In Proceedings of the 2014 IEEE 12th International Symposium on Applied Machine Intelligence and Informatics (SAMI), Herl’any, Slovakia, 23–25 June 2014; pp. 191–194. [Google Scholar]
- Behrens, M.R.; Fuller, H.C.; Swist, E.R.; Wu, J.; Islam, M.M.; Long, Z.; Ruder, W.C.; Steward, R., Jr. Open-source, 3D-printed Peristaltic Pumps for Small Volume Point-of-Care Liquid Handling. Sci. Rep. 2020, 10, 1543. [Google Scholar] [CrossRef] [Green Version]
- Martin, M.; Blu, G.; Eon, C.; Guiochon, G. The use of syringe-type pumps in liquid chromatography in order to achieve a constant flow-rate. J. Chromatogr. A 1975, 112, 399–414. [Google Scholar] [CrossRef]
- Stone, H.A.; Stroock, A.D.; Ajdari, A. Engineering flows in small devices: Microfluidics toward a lab-on-a-chip. Annu. Rev. Fluid Mech. 2004, 36, 381–411. [Google Scholar] [CrossRef] [Green Version]
- Oh, K.W.; Lee, K.; Ahn, B.; Furlani, E.P. Design of pressure-driven microfluidic networks using electric circuit analogy. Lab Chip 2012, 12, 515–545. [Google Scholar] [CrossRef]
- Poon, C. Measuring the density and viscosity of culture media for optimized computational fluid dynamics analysis of in vitro devices. J. Mech. Behav. Biomed. Mater. 2022, 126, 105024. [Google Scholar] [CrossRef] [PubMed]
- Vivas, A.; van den Berg, A.; Passier, R.; Odijk, M.; van der Meer, A.D. Fluidic circuit board with modular sensor and valves enables stand-alone, tubeless microfluidic flow control in organs-on-chips. Lab Chip 2022, 22, 1231–1243. [Google Scholar] [CrossRef] [PubMed]
- de Graaf, M.N.S. PID-Controller for Microfluidic Flow. Available online: https://github.com/mnsdegraaf/mfcb (accessed on 29 July 2022).
- Nguyen, N.T.; Truong, T.Q.; Wong, K.K.; Ho, S.S.; Low, C.L.N. Micro check valves for integration into polymeric microfluidic devices. J. Micromech. Microeng. 2004, 14, 69–75. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Qty. | Manufacturer | Supplier | Product SKU: |
|---|---|---|---|---|
| FCB or single microfluidic device | - | Custom | - | - |
| Pressure cap for 15 mL Falcon-S (4 port) | 2 | ELVEFLOW | Darwin-microfluidics | LVF-KPT-S-4 |
| 15 mL reservoirs | 2 | Falcon | ||
| Check valves | 4 | Master flex | Darwin-microfluidics | MF-30505-92 |
| Flow sensor L or XL * | 1 or 2 | Fluigent | Fluigent | FLU_L_D_FDG |
| Flow EZ-line Up 345 mbar * | 2 | Fluigent | Fluigent | LU-FEZ-345 |
| Link-up | 1 | Fluigent | Fluigent | LU-LNK-0002 |
| Pressure sensors * | 4–6 | Honeywell | Farnell | MPRLS0300YG0001B |
| Luer to 1/16 barb | 24 | IDEX | Darwin-microfluidics | CIL-P-854 |
| ¼-28–Female-to-male Luer adapter | 2 | IDEX | Darwin-microfluidics | CIL-P-655-01 |
| 3-way valve | 2 | IDEX | ||
| ¼-28–Female-to-Female Luer Lock adapter | 2 in | IDEX | Darwin-microfluidics | CIL-P-678 |
| Y-connectors | 2 | IDEX | Darwin-microfluidics | CIL-P-512 |
| PTFE tubing–1/16” OD X 1/32” ID* | ELVEFLOW | Darwin-microfluidics | LVF-KTU-15 | |
| Printed circuit board (PCB) for pressure sensor | 1 | custom | ||
| Arduino or otherMCU | 1 | Arduino | ||
| Ribbon wires | 4–6 | |||
| optional: | ||||
| Microfluidic Manifold 9 Port | 2 | ELVEFLOW | Darwin-microfluidics | LVF-KMM-02 |
| 2-Switches | 2 | Fluigent | Fluigent | 2SW002 |
| Pressure source 1.2 bar | 1 | Fluigent | Fluigent | FLPG005 |
| * Pressure and flow-rate range are setup depended |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
de Graaf, M.N.S.; Vivas, A.; van der Meer, A.D.; Mummery, C.L.; Orlova, V.V. Pressure-Driven Perfusion System to Control, Multiplex and Recirculate Cell Culture Medium for Organs-on-Chips. Micromachines 2022, 13, 1359. https://doi.org/10.3390/mi13081359
de Graaf MNS, Vivas A, van der Meer AD, Mummery CL, Orlova VV. Pressure-Driven Perfusion System to Control, Multiplex and Recirculate Cell Culture Medium for Organs-on-Chips. Micromachines. 2022; 13(8):1359. https://doi.org/10.3390/mi13081359
Chicago/Turabian Stylede Graaf, Mees N. S., Aisen Vivas, Andries D. van der Meer, Christine L. Mummery, and Valeria V. Orlova. 2022. "Pressure-Driven Perfusion System to Control, Multiplex and Recirculate Cell Culture Medium for Organs-on-Chips" Micromachines 13, no. 8: 1359. https://doi.org/10.3390/mi13081359
APA Stylede Graaf, M. N. S., Vivas, A., van der Meer, A. D., Mummery, C. L., & Orlova, V. V. (2022). Pressure-Driven Perfusion System to Control, Multiplex and Recirculate Cell Culture Medium for Organs-on-Chips. Micromachines, 13(8), 1359. https://doi.org/10.3390/mi13081359