

Soft Molds with Micro-Machined Internal Skeletons Improve Robustness of Flapping-Wing Robots



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Robot Design
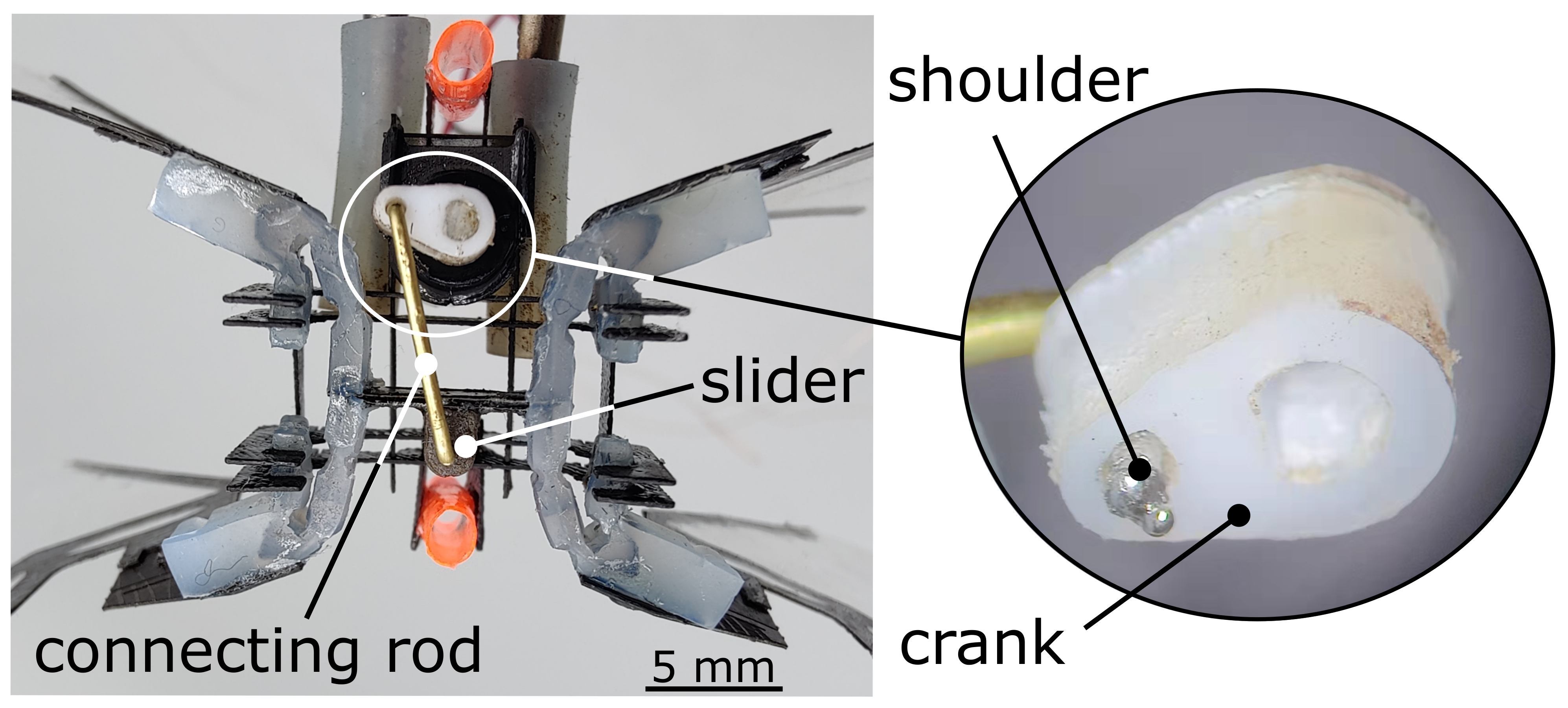
2.1. Transmission
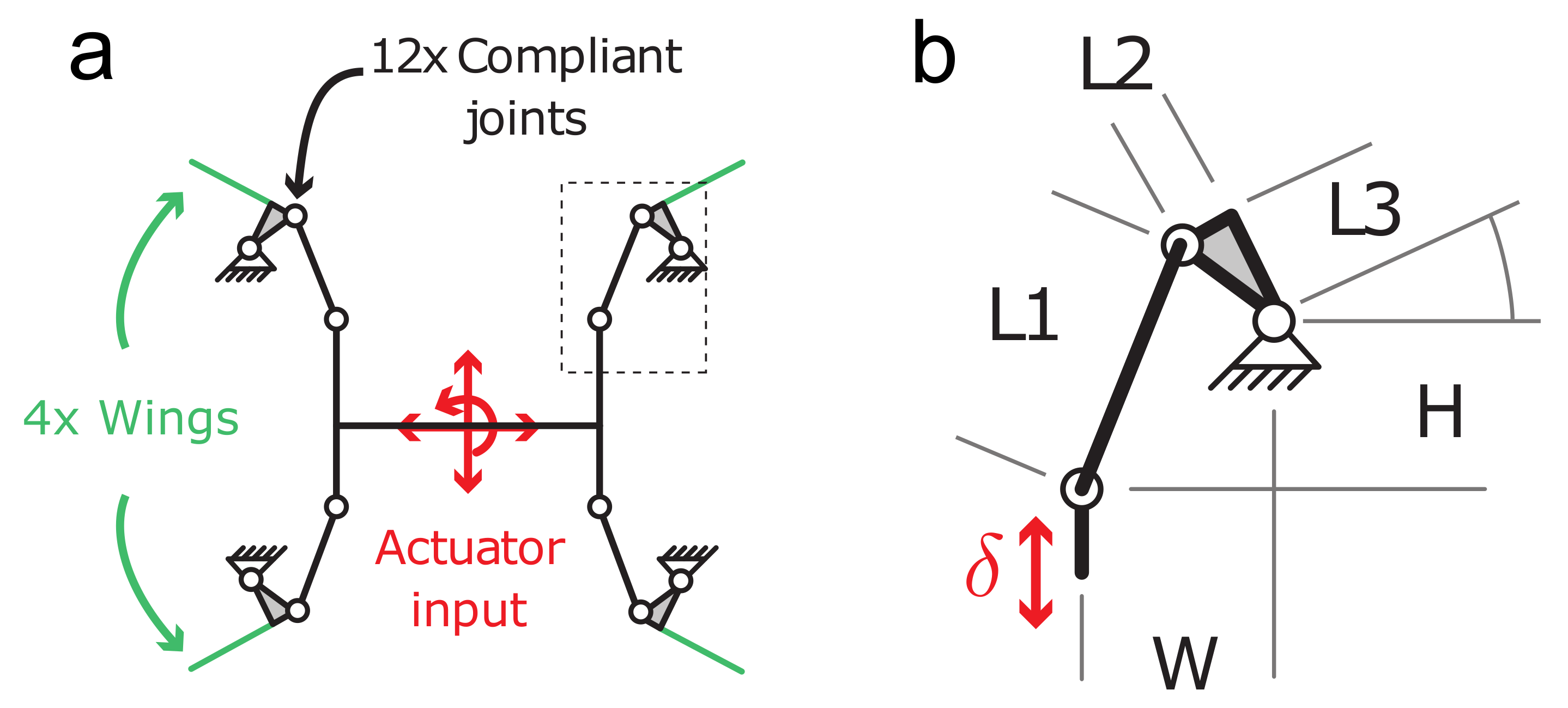
2.1.1. Kinematic Design
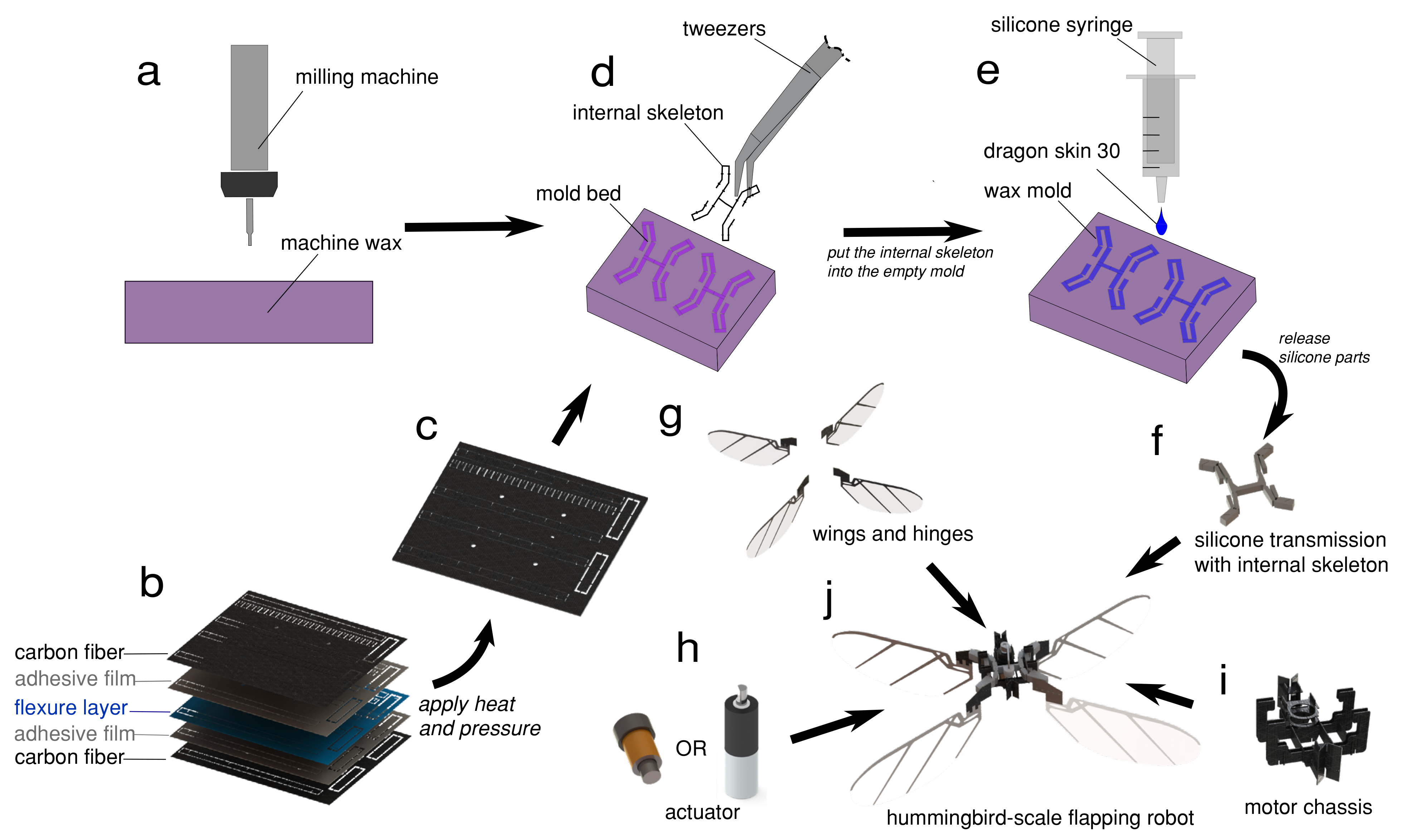
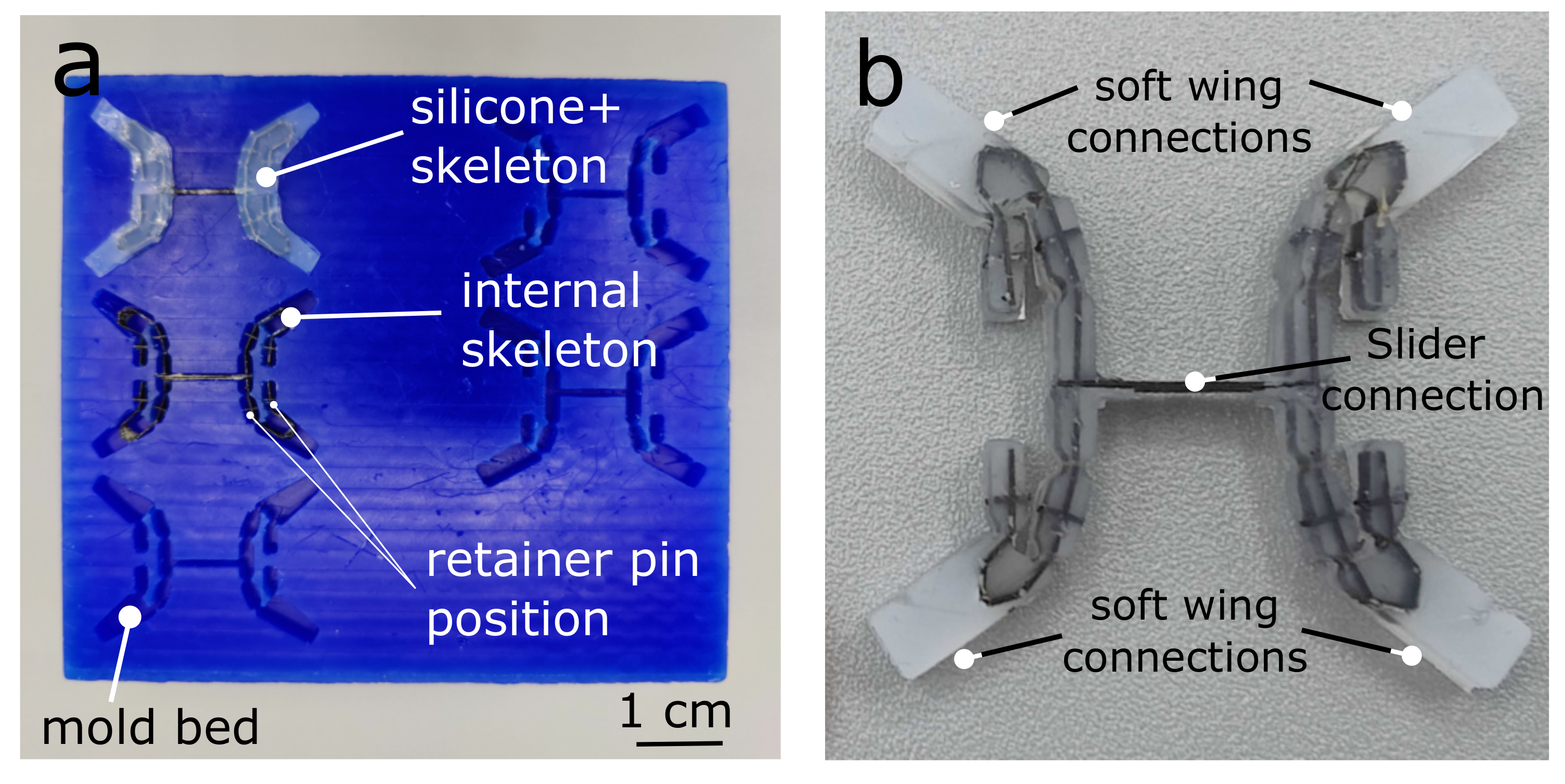
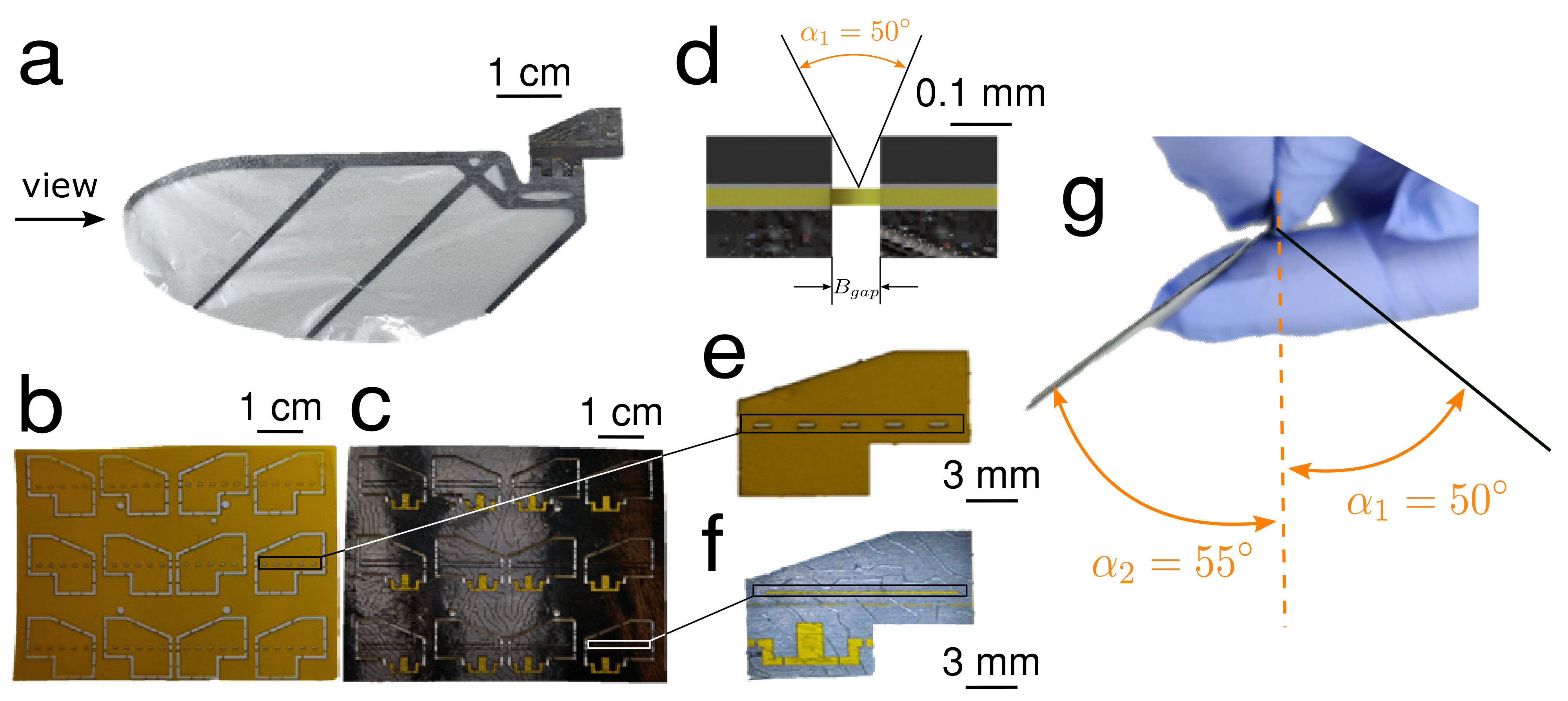
2.1.2. Fabrication
2.2. Wings
2.2.1. Wing Geometry
2.2.2. Wing Hinge
2.3. Actuation
2.4. Chassis and Structure
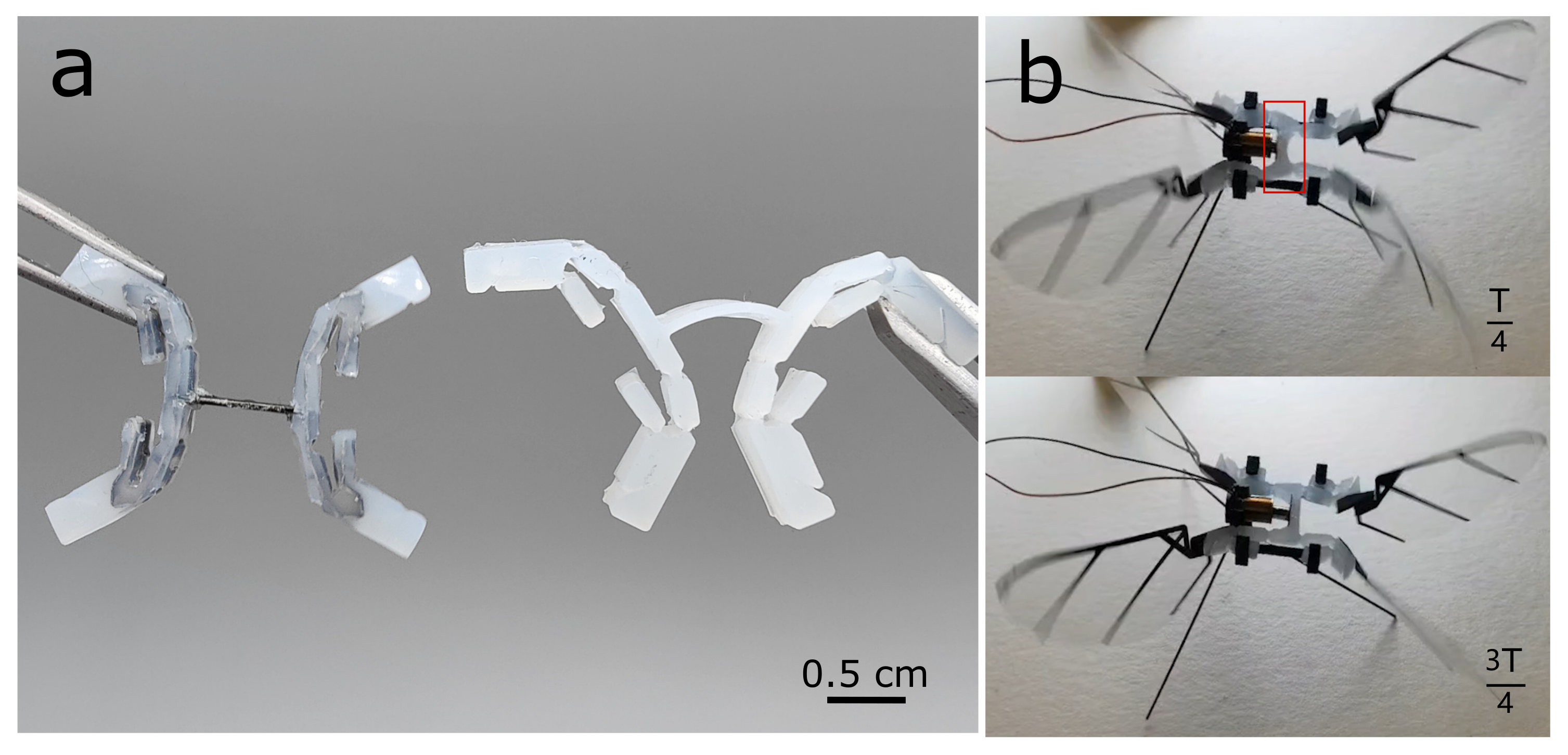
2.5. Assembly
3. Results
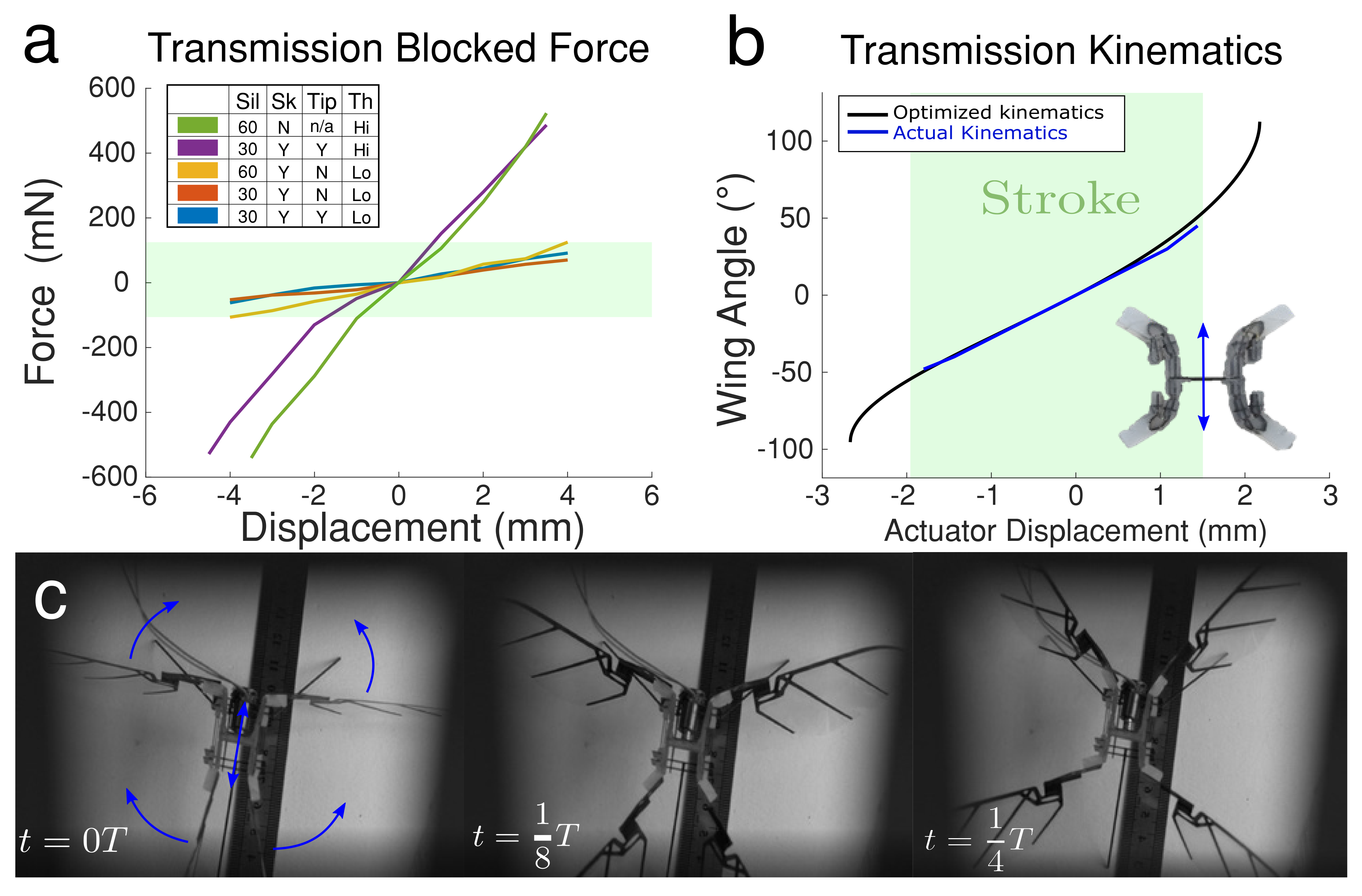
3.1. Transmission Kinematic and Dynamic Characterization
3.2. Transmission Fatigue
3.3. Elastic Energy Exchange of the Robot Wingbeat
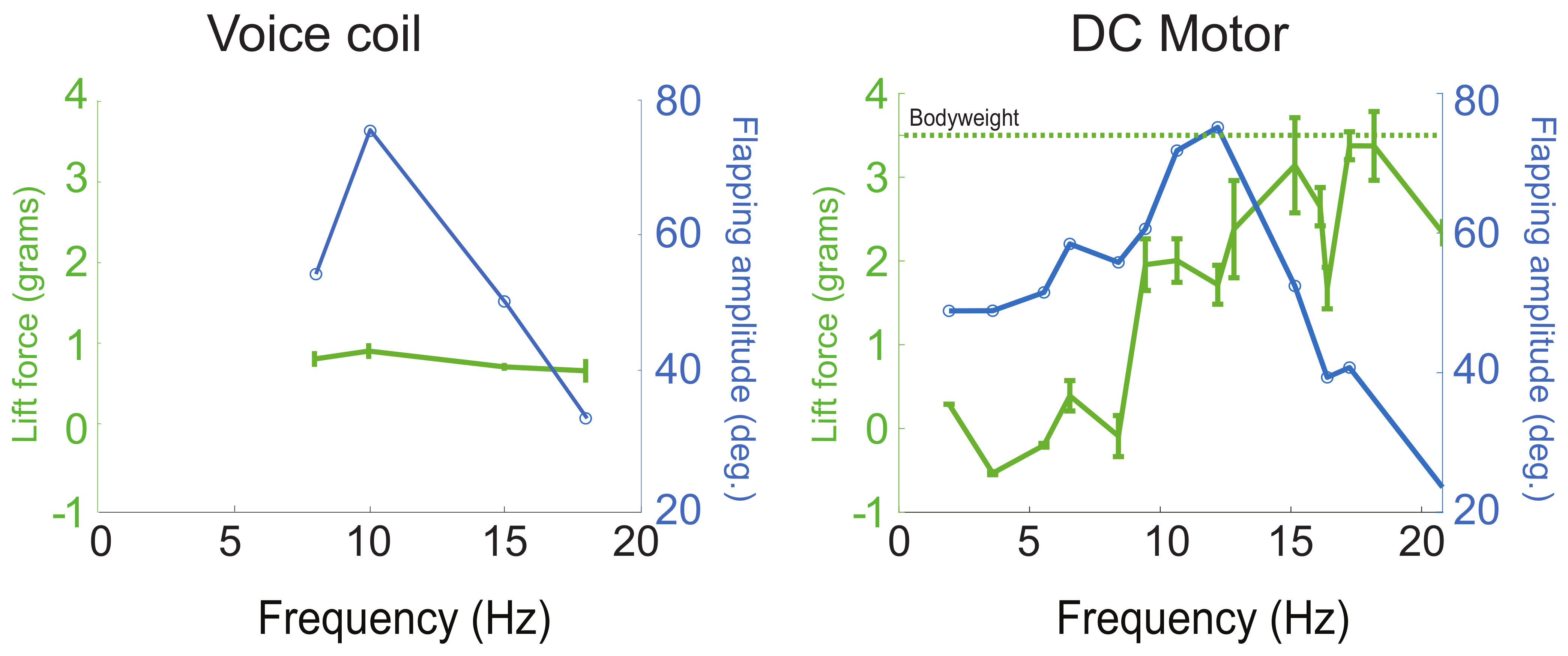
3.4. Free Lift-Off
3.5. Robustness of the Robot Wingbeat
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Ellington, C.P. The novel aerodynamics of insect flight: Applications to micro-air vehicles. J. Exp. Biol. 1999, 202, 3439–3448. [Google Scholar] [CrossRef]
- Whitney, J.P.; Wood, R.J. Conceptual design of flapping-wing micro air vehicles. Bioinspir. Biomim. 2012, 7, 036001. [Google Scholar] [CrossRef] [PubMed]
- Ma, K.Y.; Chirarattananon, P.; Fuller, S.B.; Wood, R.J. Controlled Flight of a Biologically Inspired, Insect-Scale Robot. Science 2013, 340, 603–607. [Google Scholar] [CrossRef] [PubMed]
- Tu, Z.; Fei, F.; Zhang, J.; Deng, X. Acting Is Seeing: Navigating Tight Space Using Flapping Wings. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 95–101. [Google Scholar]
- Jafferis, N.T.; Helbling, E.F.; Karpelson, M.; Wood, R.J. Untethered flight of an insect-sized flapping-wing microscale aerial vehicle. Nature 2019, 570, 491–495. [Google Scholar] [CrossRef]
- Phan, H.V.; Kang, T.; Park, H.C. Design and stable flight of a 21 g insect-like tailless flapping wing micro air vehicle with angular rates feedback control. Bioinspir. Biomim. 2017, 12, 036006. [Google Scholar] [CrossRef] [PubMed]
- Tu, Z.; Fei, F.; Deng, X. Untethered Flight of an At-Scale Dual-Motor Hummingbird Robot With Bio-Inspired Decoupled Wings. IEEE Robot. Autom. Lett. 2020, 5, 4194–4201. [Google Scholar] [CrossRef]
- Fuller, S.B.; Karpelson, M.; Censi, A.; Ma, K.Y.; Wood, R.J. Controlling free flight of a robotic fly using an onboard vision sensor inspired by insect ocelli. J. R. Soc. Interface 2014, 11, 20140281. [Google Scholar] [CrossRef]
- Jayaram, K.; Jafferis, N.T.; Doshi, N.; Goldberg, B.; Wood, R.J. Concomitant sensing and actuation for piezoelectric microrobots. Smart Mater. Struct. 2018, 27, 065028. [Google Scholar] [CrossRef]
- De Wagter, C.; Tijmons, S.; Remes, B.D.W.; de Croon, G.C.H.E. Autonomous flight of a 20-g Flapping Wing MAV with a 4-g onboard stereo vision system. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 4982–4987. [Google Scholar]
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 2016, 1, eaah3690. [Google Scholar] [CrossRef]
- Andersen, S.O.; Weis-Fogh, T. Resilin. A Rubberlike Protein in Arthropod Cuticle. In Advances in Insect Physiology; Beament, J.W.L., Treherne, J.E., Wigglesworth, V.B., Eds.; Academic Press: Cambridge, MA, USA, 1964; Volume 2, pp. 1–65. [Google Scholar]
- Michels, J.; Appel, E.; Gorb, S.N. Functional diversity of resilin in Arthropoda. Beilstein J. Nanotechnol. 2016, 7, 1241–1259. [Google Scholar] [CrossRef] [Green Version]
- Gau, J.; Gravish, N.; Sponberg, S. Indirect actuation reduces flight power requirements in Manduca sexta via elastic energy exchange. J. R. Soc. Interface 2019, 16, 20190543. [Google Scholar] [CrossRef]
- Lynch, J.; Gau, J.; Sponberg, S.; Gravish, N. Dimensional analysis of spring-wing systems reveals performance metrics for resonant flapping-wing flight. J. R. Soc. Interface 2021, 18, 20200888. [Google Scholar] [CrossRef]
- Mountcastle, A.M.; Combes, S.A. Biomechanical strategies for mitigating collision damage in insect wings: Structural design versus embedded elastic materials. J. Exp. Biol. 2014, 217, 1108–1115. [Google Scholar] [CrossRef]
- Deora, T.; Gundiah, N.; Sane, S.P. Mechanics of the thorax in flies. J. Exp. Biol. 2017, 220, 1382–1395. [Google Scholar] [CrossRef]
- Baek, S.S.; Ma, K.Y.; Fearing, R.S. Efficient resonant drive of flapping-wing robots. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; IEEE: St. Louis, MO, USA, 2009; pp. 2854–2860. [Google Scholar]
- Campolo, D.; Azhar, M.; Lau, G.K.; Sitti, M. Can DC Motors Directly Drive Flapping Wings at High Frequency and Large Wing Strokes? IEEE/ASME Trans. Mechatron. 2014, 19, 109–120. [Google Scholar] [CrossRef]
- Sahai, R.; Galloway, K.C.; Wood, R.J. Elastic Element Integration for Improved Flapping-Wing Micro Air Vehicle Performance. IEEE Trans. Robot. 2013, 29, 32–41. [Google Scholar] [CrossRef]
- Weis-Fogh, T. Quick Estimates of Flight Fitness in Hovering Animals, Including Novel Mechanisms for Lift Production. J. Exp. Biol. 1973, 59, 169–230. [Google Scholar] [CrossRef]
- Chen, Y.; Zhao, H.; Mao, J.; Chirarattananon, P.; Helbling, E.F.; Hyun, N.S.P.; Clarke, D.R.; Wood, R.J. Controlled flight of a microrobot powered by soft artificial muscles. Nature 2019, 575, 324–329. [Google Scholar] [CrossRef]
- Chen, C.; Zhang, T. A Review of Design and Fabrication of the Bionic Flapping Wing Micro Air Vehicles. Micromachines 2019, 10, 144. [Google Scholar] [CrossRef]
- Mountcastle, A.M.; Helbling, E.F.; Wood, R.J. An insect-inspired collapsible wing hinge dampens collision-induced body rotation rates in a microrobot. J. R. Soc. Interface 2019, 16, 20180618. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Phan, H.V.; Park, H.C. Mechanisms of collision recovery in flying beetles and flapping-wing robots. Science 2020, 370, 1214–1219. [Google Scholar] [CrossRef]
- Mintchev, S.; Shintake, J.; Floreano, D. Bioinspired dual-stiffness origami. Sci. Robot. 2018, 3, eaau0275. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Xu, S.; Ren, Z.; Chirarattananon, P. Collision Resilient Insect-Scale Soft-Actuated Aerial Robots With High Agility. IEEE Trans. Robot. 2021, 37, 1752–1764. [Google Scholar] [CrossRef]
- Sreetharan, P.S.; Whitney, J.P.; Strauss, M.D.; Wood, R.J. Monolithic fabrication of millimeter-scale machines. J. Micromech. Microeng. 2012, 22, 055027. [Google Scholar] [CrossRef]
- Pérez-Arancibia, N.O.; Ma, K.Y.; Galloway, K.C.; Greenberg, J.D.; Wood, R.J. First controlled vertical flight of a biologically inspired microrobot. Bioinspir. Biomim. 2011, 6, 036009. [Google Scholar] [CrossRef]
- Rosen, M.H.; Le Pivain, G.; Sahai, R.; Jafferis, N.T.; Wood, R.J. Development of a 3.2 g untethered flapping-wing platform for flight energetics and control experiments. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3227–3233. [Google Scholar]
- Wood, R.J.; Avadhanula, S.; Sahai, R.; Steltz, E.; Fearing, R.S. Microrobot design using fiber reinforced composites. J. Mech. Des. 2008, 130, 052304. [Google Scholar] [CrossRef]
- Cham, J.G.; Bailey, S.A.; Clark, J.E.; Full, R.J.; Cutkosky, M.R. Fast and Robust: Hexapedal Robots via Shape Deposition Manufacturing. Int. J. Robot. Res. 2002, 21, 869–882. [Google Scholar] [CrossRef]
- Zhou, W.; Gravish, N. Soft Microrobotic Transmissions Enable Rapid Ground-Based Locomotion. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 7874–7880. [Google Scholar]
- Salcedo, M.K.; Hoffmann, J.; Donoughe, S.; Mahadevan, L. Computational analysis of size, shape and structure of insect wings. Biol. Open 2019, 8, bio040774. [Google Scholar] [CrossRef]
- Chukewad, Y.M.; James, J.; Singh, A. RoboFly: An insect-sized robot with simplified fabrication that is capable of flight, ground, and water surface locomotion. IEEE Trans. Robot. 2021, 37, 2025–2040. [Google Scholar] [CrossRef]
- Sane, S.P. The aerodynamics of insect flight. J. Exp. Biol. 2003, 206, 4191–4208. [Google Scholar] [CrossRef] [Green Version]
- Roll, J.A.; Cheng, B.; Deng, X. An Electromagnetic Actuator for High-Frequency Flapping-Wing Microair Vehicles. IEEE Trans. Robot. 2015, 31, 400–414. [Google Scholar] [CrossRef]
- Zou, Y.; Zhang, W.; Zhang, Z. Liftoff of an electromagnetically driven insect-inspired flapping-wing robot. IEEE Trans. Robot. 2016, 32, 1285–1289. [Google Scholar] [CrossRef]
- Malka, R.; Desbiens, A.L.; Chen, Y.; Wood, R.J. Principles of microscale flexure hinge design for enhanced endurance. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 2879–2885. [Google Scholar]
- Zhang, J.; Deng, X. Resonance Principle for the Design of Flapping Wing Micro Air Vehicles. IEEE Trans. Robot. 2017, 33, 183–197. [Google Scholar] [CrossRef]
- Farrell Helbling, E.; Wood, R.J. A Review of Propulsion, Power, and Control Architectures for Insect-Scale Flapping-Wing Vehicles. Appl. Mech. Rev. 2018, 70, 010801. [Google Scholar] [CrossRef]
- Birkmeyer, P.; Peterson, K.; Fearing, R.S. DASH: A dynamic 16g hexapedal robot. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 2683–2689. [Google Scholar]
- Tolley, M.T.; Shepherd, R.F.; Mosadegh, B.; Galloway, K.C.; Wehner, M.; Karpelson, M.; Wood, R.J.; Whitesides, G.M. A Resilient, Untethered Soft Robot. Soft Robot. 2014, 1, 213–223. [Google Scholar] [CrossRef]
- Jayaram, K.; Full, R.J. Cockroaches traverse crevices, crawl rapidly in confined spaces, and inspire a soft, legged robot. Proc. Natl. Acad. Sci. USA 2016, 113, E950–E957. [Google Scholar] [CrossRef]
- Wu, Y.; Yim, J.K.; Liang, J.; Shao, Z.; Qi, M.; Zhong, J.; Luo, Z.; Yan, X.; Zhang, M.; Wang, X.; et al. Insect-scale fast moving and ultrarobust soft robot. Sci. Robot. 2019, 4, eaax1594. [Google Scholar] [CrossRef] [PubMed] [Green Version]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, H.; Lynch, J.; Gravish, N. Soft Molds with Micro-Machined Internal Skeletons Improve Robustness of Flapping-Wing Robots. Micromachines 2022, 13, 1489. https://doi.org/10.3390/mi13091489
Gao H, Lynch J, Gravish N. Soft Molds with Micro-Machined Internal Skeletons Improve Robustness of Flapping-Wing Robots. Micromachines. 2022; 13(9):1489. https://doi.org/10.3390/mi13091489
Chicago/Turabian StyleGao, Hang, James Lynch, and Nick Gravish. 2022. "Soft Molds with Micro-Machined Internal Skeletons Improve Robustness of Flapping-Wing Robots" Micromachines 13, no. 9: 1489. https://doi.org/10.3390/mi13091489
APA StyleGao, H., Lynch, J., & Gravish, N. (2022). Soft Molds with Micro-Machined Internal Skeletons Improve Robustness of Flapping-Wing Robots. Micromachines, 13(9), 1489. https://doi.org/10.3390/mi13091489