
A Fast Simulation Method for Evaluating the Single-Event Effect in Aerospace Integrated Circuits



 ,
,  and
and 
Abstract
:1. Introduction
2. Proposed Method
2.1. Motivation
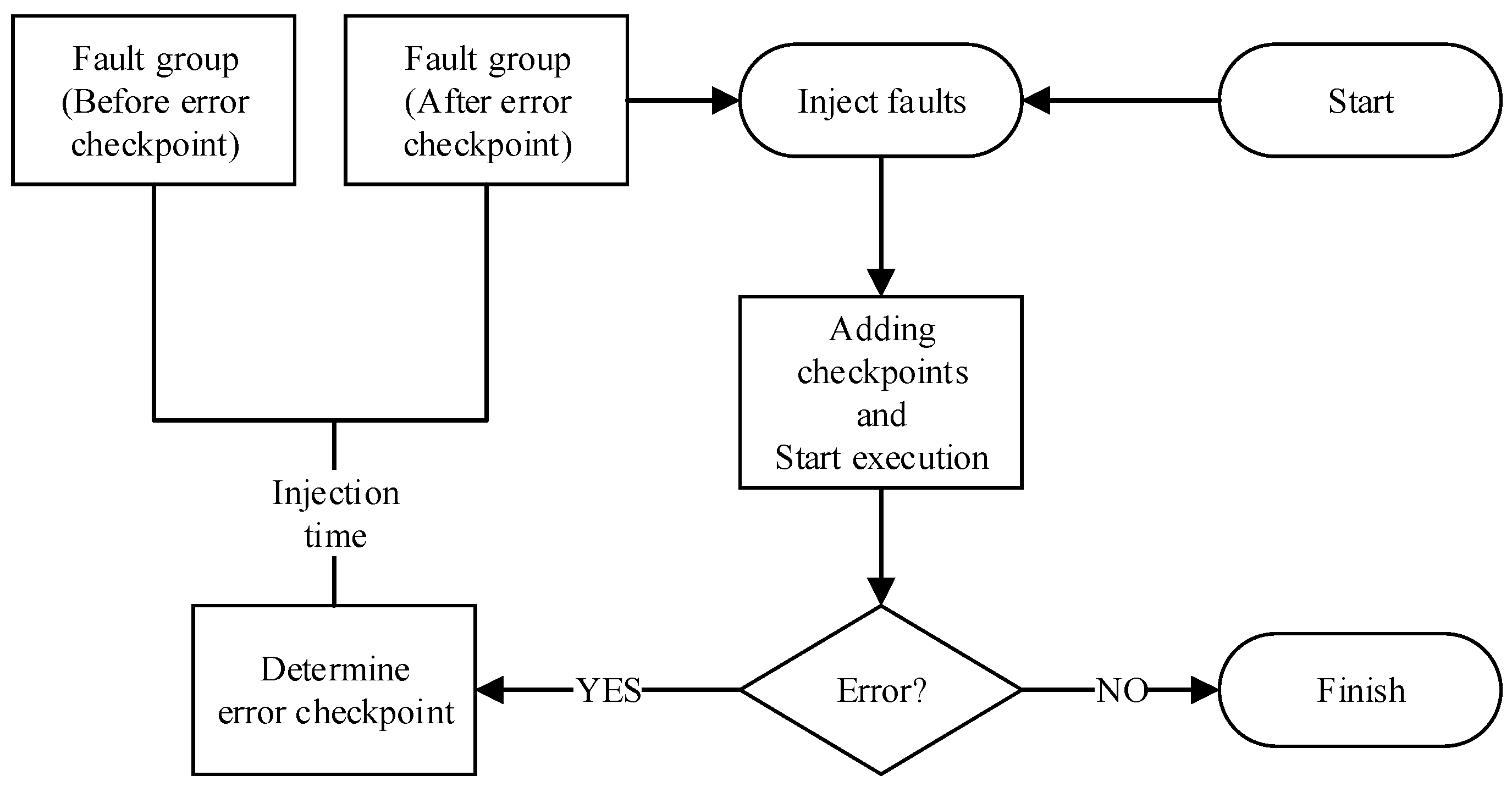
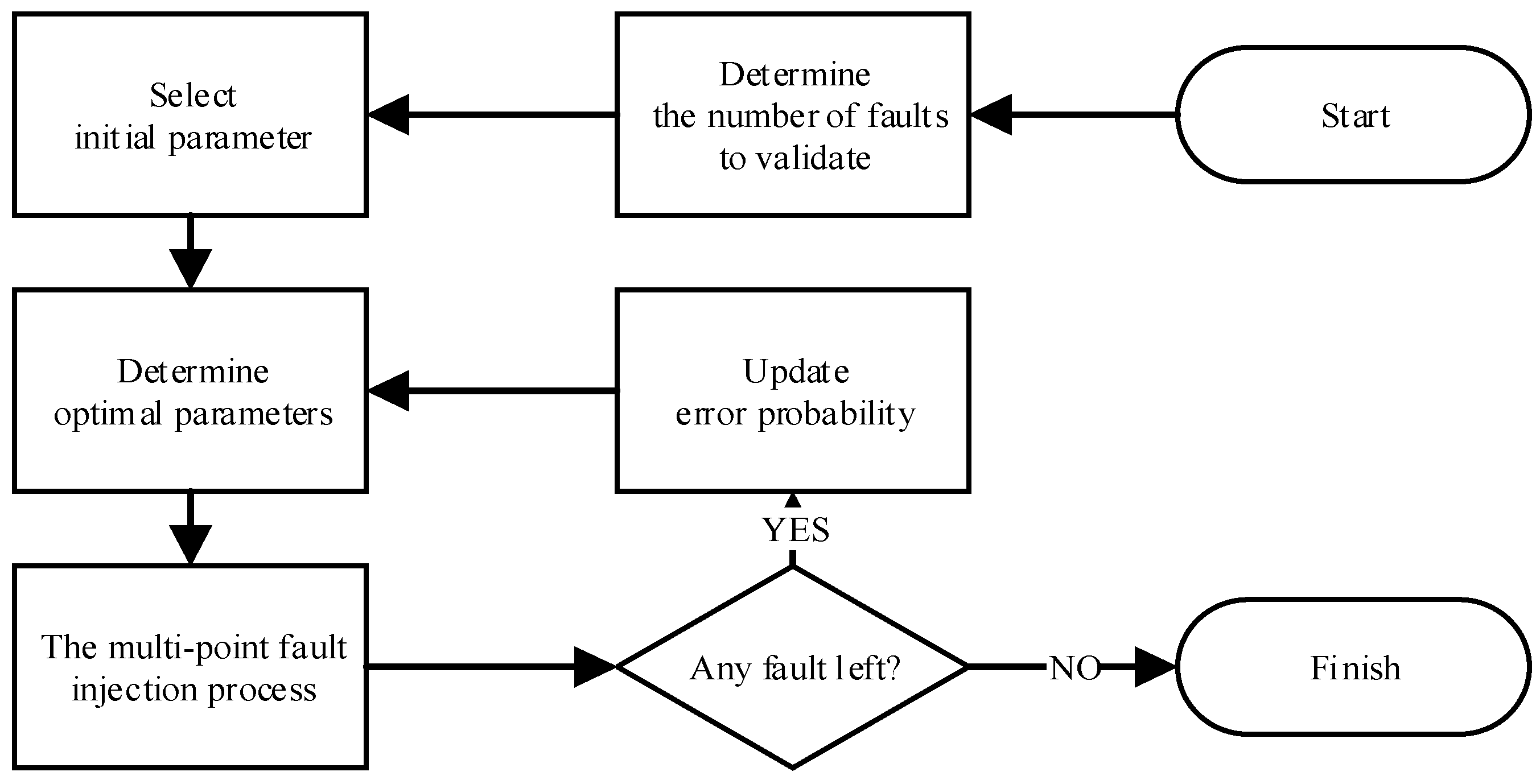
2.2. The Introduction of One Multi-Point Fault Injection Process
2.3. Determination of Relevant Parameters
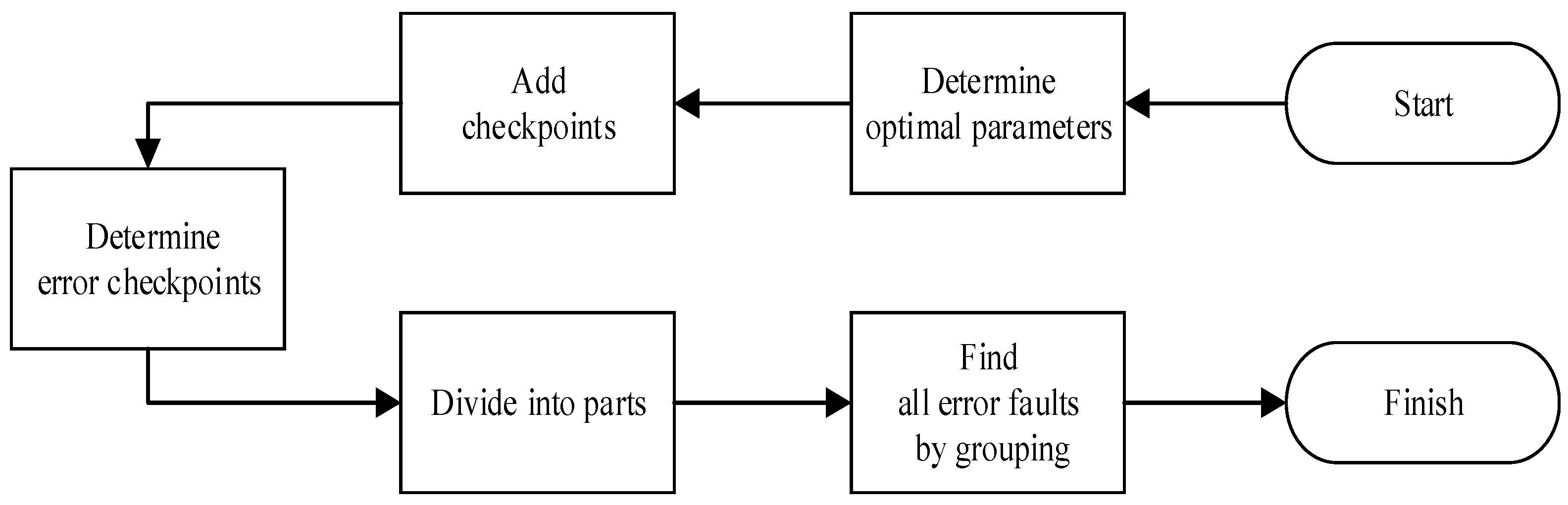
2.4. Add Checkpoints to Optimize the Grouping Method
2.5. Overall Simulation Flow
3. Results and Analysis
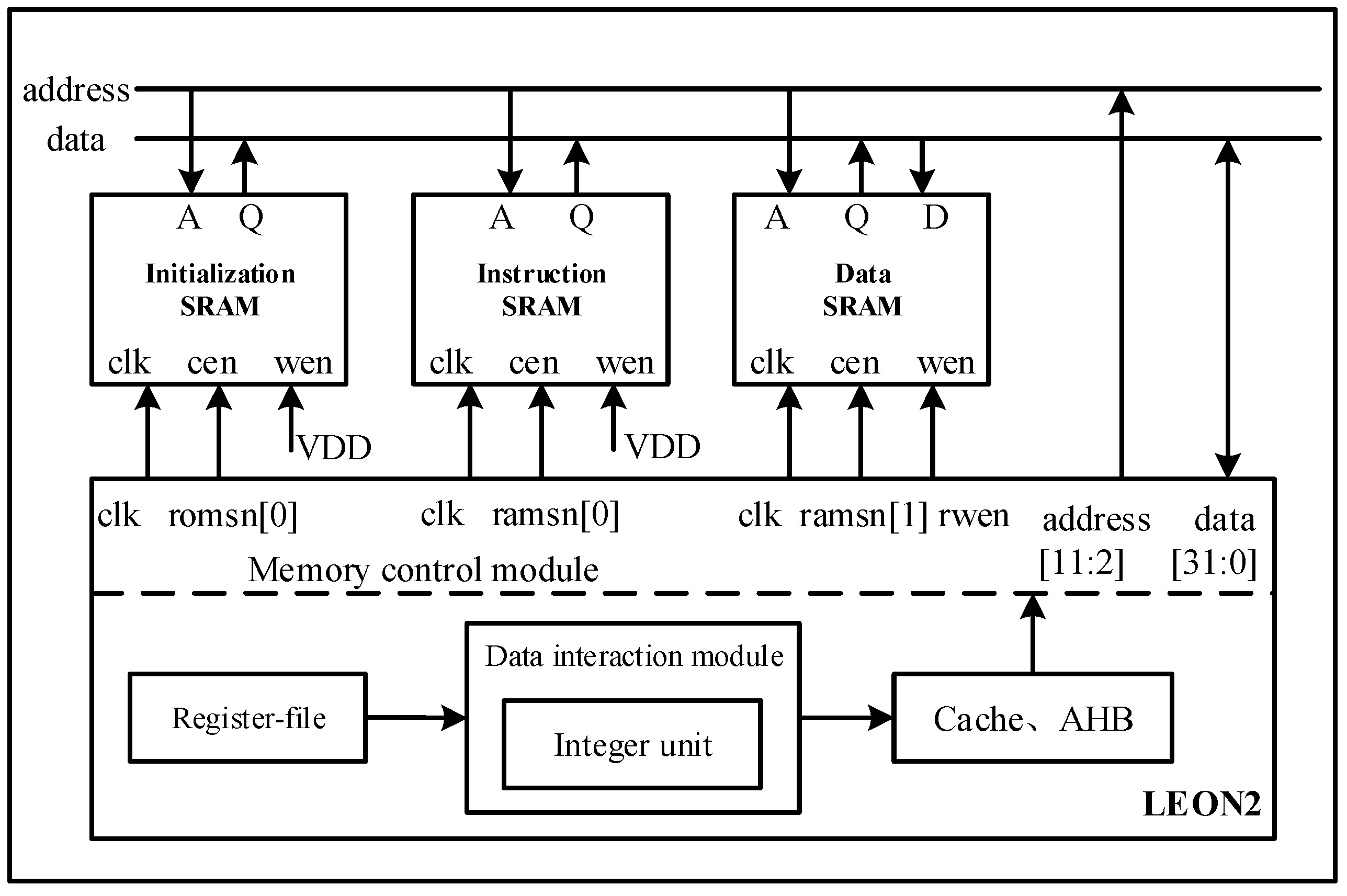
3.1. Simulation Setup
3.2. Result and Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Schwank, J.R.; Shaneyfelt, M.R.; Fleetwood, D.M.; Felix, J.A.; Dodd, P.E.; Paillet, P.; Ferlet-Cavrois, V. Radiation Effects in MOS Oxides. IEEE Trans. Nucl. Sci. 2008, 55, 1833–1853. [Google Scholar] [CrossRef]
- Wang, Q.; Liu, H.; Wang, S.; Chen, S. TCAD Simulation of Single-Event-Transient Effects in L-Shaped Channel Tunneling Field-Effect Transistors. IEEE Trans. Nucl. Sci. 2018, 65, 2250–2259. [Google Scholar] [CrossRef]
- Uemura, T.; Lee, S.; Monga, U.; Choi, J.; Lee, S.; Pae, S. Technology Scaling Trend of Soft Error Rate in Flip-Flops in 1 × nm Bulk FinFET Technology. IEEE Trans. Nucl. Sci. 2018, 65, 1255–1263. [Google Scholar] [CrossRef]
- Bennett, W.G.; Schrimpf, R.D.; Hooten, N.C.; Reed, R.A.; Kauppila, J.S.; Weller, R.A.; Warren, K.M.; Mendenhall, M.H. Efficient Method for Estimating the Characteristics of Radiation-Induced Current Transients. IEEE Trans. Nucl. Sci. 2012, 59, 2704–2709. [Google Scholar] [CrossRef]
- Wu, Z.; Chen, S. Heavy Ion, Proton, and Neutron Charge Deposition Analyses in Several Semiconductor Materials. IEEE Trans. Nucl. Sci. 2018, 65, 1791–1799. [Google Scholar] [CrossRef]
- Lu, Z.; Zhou, W. Analysis of Single Event Effect on SRAM Based on TCAD Simulation. In Proceedings of the 2015 8th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 12–13 December 2015; pp. 588–591. [Google Scholar]
- Borisov, A.Y.; Novikov, A.A.; Petrun, N.L.; Nefedova, A.A.; Chukov, G.V. The Optimal Estimation of Single Event Effects Sensitivity Parameters Using a Focused Laser Source and Heavy Ion Cyclotron on Example of a Library of Analog IP Units. In Proceedings of the 2021 International Siberian Conference on Control and Communications (SIBCON), Kazan, Russia, 13–15 May 2021; pp. 1–5. [Google Scholar]
- Gasiot, G.; Abouzeid, F.; Malherbe, V.; Damiens, J.; Monsieur, F.; De Boissac, C.L.M.; Soussan, D.; Lorquet, V.; Thery, T.; Roche, P. New Single Event Transient phenomenon in 28FDSOI and its impact on hardening. In Proceedings of the 2019 19th European Conference on Radiation and Its Effects on Components and Systems (RADECS), Montpellier, France, 16–20 September 2019; pp. 1–5. [Google Scholar]
- Truyen, D.; Montagner, L. New Approach of Single Event Latchup Modeling Based on TCAD Simulations and Design of Experiment Analysis. In Proceedings of the 2019 19th European Conference on Radiation and Its Effects on Components and Systems (RADECS), Montpellier, France, 16–20 September 2019; pp. 1–4. [Google Scholar]
- Fleetwood, Z.E.; Lourenco, N.E.; Ildefonso, A.; Warner, J.H.; Wachter, M.T.; Hales, J.M.; Tzintzarov, G.N.; Roche, N.J.-H.; Khachatrian, A.; Buchner, S.P.; et al. Using TCAD Modeling to Compare Heavy-Ion and Laser-Induced Single Event Transients in SiGe HBTs. IEEE Trans. Nucl. Sci. 2017, 64, 398–405. [Google Scholar] [CrossRef]
- Maiti, C.K.; Dash, T.P. Simulation of single event upset in power MOSFETs. In Proceedings of the 2017 Devices for Integrated Circuit (DevIC), Kalyani, India, 23–24 March 2017. [Google Scholar]
- Ding, L.; Chen, W.; Wang, T.; Chen, R.; Luo, Y.; Zhang, F.; Pan, X.; Sun, H.; Chen, L. Modeling the Dependence of Single-Event Transients on Strike Location for Circuit-Level Simulation. IEEE Trans. Nucl. Sci. 2019, 66, 866–874. [Google Scholar] [CrossRef]
- Shambhulingaiah, S.; Lieb, C.; Clark, L.T. Circuit Simulation-Based Validation of Flip-Flop Robustness to Multiple Node Charge Collection. IEEE Trans. Nucl. Sci. 2015, 62, 1577–1588. [Google Scholar] [CrossRef]
- Andrianjohany, N.; Pourrouquet, P.; Coulié, K.; Chatry, N.; Rahajandraibe, W.; Standarovski, D.; Rolland, G.; Ecoffet, R. Prediction methodology of single event effect sensitivity and application on SRAM device. In Proceedings of the 2016 16th European Conference on Radiation and Its Effects on Components and Systems (RADECS), Bremen, Germany, 19–23 September 2016; pp. 1–7. [Google Scholar]
- Mansour, W.; Velazco, R. SEU fault-injection in VHDL-based processors: A case study. In Proceedings of the 2012 13th Latin American Test Workshop (LATW), Quito, Ecuador, 10–13 April 2012; pp. 1–5. [Google Scholar]
- Cannon, M.; Rodrigues, A.; Black, D.; Black, J.; Bustamante, L.; Breeding, M.; Feinberg, B.; Skoufis, M.; Quinn, H.; Clark, L.T.; et al. Multiscale System Modeling of Single-Event-Induced Faults in Advanced Node Processors. IEEE Trans. Nucl. Sci. 2021, 68, 980–990. [Google Scholar] [CrossRef]
- Champon, R.; Beroulle, V.; Papadimitriou, A.; Hély, D.; Genévrier, G.; Cézilly, F. Comparison of RTL fault models for the robustness evaluation of aerospace FPGA devices. In Proceedings of the 2016 IEEE 22nd International Symposium on On-Line Testing and Robust System Design (IOLTS), Sant Feliu de Guixols, Spain, 4–6 July 2016; pp. 23–24. [Google Scholar]
- Li, Z.B.; Liu, Y.; Xu, C.Q.; Song, L.T.; Wu, H.P. SRAM Single Event Effect Simulation Method Based on Random Injection Mechanism. In Proceedings of the 2018 14th IEEE International Conference on Solid-State and Integrated Circuit Technology (ICSICT), Qingdao, China, 31 October–3 November 2018; pp. 1–3. [Google Scholar]
- Leveugle, R.; Calvez, A.; Maistri, P.; Vanhauwaert, P. Statistical fault injection: Quantified error and confidence. In Proceedings of the 2009 Design, Automation & Test in Europe Conference & Exhibition, Nice, France, 20–24 April 2009; pp. 502–506. [Google Scholar]
- Reick, K.; Sanda, P.N.; Swaney, S.; Kellington, J.W.; Mack, M.; Floyd, M.; Henderson, D. Fault-Tolerant Design of the IBM Power6 Microprocessor. IEEE Micro 2008, 28, 30–38. [Google Scholar] [CrossRef]
- Cher, C.Y.; Muller, K.P.; Haring, R.A.; Satterfield, D.L.; Musta, T.E.; Gooding, T.M.; Davis, K.D.; Dombrowa, M.B.; Kopcsay, G.V.; Senger, R.M.; et al. Soft error resiliency characterization and improvement on IBM BlueGene/Q processor using accelerated proton irradiation. In Proceedings of the 2014 International Test Conference, Seattle, WA, USA, 20–23 October 2014; pp. 1–6. [Google Scholar]
- Meng, X.; Tan, Q.; Shao, Z.; Zhang, N.; Xu, J.; Zhang, H. SEInjector: A Dynamic Fault Injection Tool for Soft Errors on X86. In Proceedings of the 2017 International Conference on Computer Systems, Electronics, and Control (ICCSEC), Dalian, China, 25–27 December 2017; pp. 1492–1495. [Google Scholar]
- Sangchoolie, B.; Johansson, R.; Karlsson, J. Light-Weight Techniques for Improving the Controllability and Efficiency of ISA-Level Fault Injection Tools. In Proceedings of the 2017 IEEE 22nd Pacific Rim International Symposium on Dependable Computing (PRDC), Christchurch, New Zealand, 22–25 January 2017; pp. 68–77. [Google Scholar]
- Pusz, O.; Kiechle, D.; Dietrich, C.; Lohmann, D. Program-Structure-Guided Approximation of Large Fault Spaces. In Proceedings of the 2019 IEEE 24th Pacific Rim International Symposium on Dependable Computing (PRDC), Kyoto, Japan, 1–3 December 2019; pp. 138–13809. [Google Scholar]
- Dietrich, C.; Schmider, A.; Pusz, O.; Vaya, G.P.; Lohmann, D. Cross-Layer Fault-Space Pruning for Hardware-Assisted Fault Injection. In Proceedings of the 2018 55th ACM/ESDA/IEEE Design Automation Conference (DAC), San Francisco, CA, USA, 24–28 June 2018; pp. 1–6. [Google Scholar]
- Ubar, R.; Jürimägi, L.; Orasson, E.; Raik, J. Scalable algorithm for structural fault collapsing in digital circuits. In Proceedings of the 2015 IFIP/IEEE International Conference on Very Large-Scale Integration (VLSI-SoC), Daejeon, South Korea, 5–7 October 2015; pp. 171–176. [Google Scholar]
- Hari, S.K.S.; Adve, S.V.; Naeimi, H.; Ramachandran, P. Relyzer: Application Resiliency Analyzer for Transient Faults. IEEE Micro 2013, 33, 58–66. [Google Scholar] [CrossRef]
- Chen, Q.; Liu, Y.; Wu, Z.; Liao, J. A Single Event Effect Simulation Method for RISC-V Processor. In Proceedings of the 2021 IEEE 15th International Conference on Anti-counterfeiting, Security, and Identification (ASID), Xiamen, China, 29–30 December 2021; pp. 106–110. [Google Scholar]
- Valderas, M.G.; Peronnard, P.; Ongil, C.L.; Ecoffet, R.; Bezerra, F.; Velazco, R. Two Complementary Approaches for Studying the Effects of SEUs on Digital Processors. IEEE Trans. Nucl. Sci. 2007, 54, 924–928. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Setup | Parameters | Description |
|---|---|---|
| Time interval | 300 ns | Analyze the test program |
| Injection time | 8700–15,000 ns | From the end of the system initialization |
| LET | 100 MeVcm2/mg | Make sure errors can be detected |
| Fault Injection Module | |
|---|---|
| Integer unit | 53,148.99 |
| Cache | 21,611.30 |
| Memory control module | 12,165.27 |
| Register-file | 421,410.11 |
| Fault Injection Module | Error Probability | Speedup without Checkpoints | Speedup with Checkpoints |
|---|---|---|---|
| Integer unit | 2.85% | 3.88× | 4.17× |
| Cache | 0.82% | 9.81× | 10.30× |
| Memory control module | 1.92% | 5.16× | 5.34× |
| Register-file | 0.09% | 57.56× | 60.69× |
| Fault Injection Module | The Optimal Number of Faults | The Optimal Grouping Method | Speedup by Theoretical Analysis |
|---|---|---|---|
| Integer unit | 27 | 3 | 3.90× |
| Cache | 81 | 3 | 9.92× |
| Memory control module | 27 | 3 | 5.21× |
| Register-file | 729 | 3 | 61.43× |
| Injection Module | Error Faults = 1 | Error Faults = 2 | Error Faults ≥ 3 | |||
|---|---|---|---|---|---|---|
| With Checkpoints | Without Checkpoints | With Checkpoints | Without Checkpoints | With Checkpoints | Without Checkpoints | |
| Integer unit | 11.81 | 27 | 14.49 | 27 | 16.71 | 27 |
| Cache | 29.88 | 81 | 44.65 | 81 | 57.31 | 81 |
| Memory control module | 14.63 | 27 | 17.24 | 27 | 19.28 | 27 |
| Register-file | 234.25 | 729 | 348.45 | 729 | 443.33 | 729 |
| Injection Module | The Probability of Error Fault = 0 | The Probability of Error Fault = 1 | The Probability of Error Fault = 2 | The Probability |
|---|---|---|---|---|
| of Error Fault ≥ 3 | ||||
| Integer unit | 45.13% | 39.82% | 9.73% | 5.32% |
| Cache | 51.30% | 33.91% | 12.17% | 2.62% |
| Memory control module | 60.55% | 29.05% | 8.26% | 2.14% |
| Register-file | 53.15% | 28.83% | 13.51% | 4.51% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Liu, Y.; Xu, C.; Liao, X.; Chen, D.; Yang, Y. A Fast Simulation Method for Evaluating the Single-Event Effect in Aerospace Integrated Circuits. Micromachines 2023, 14, 1887. https://doi.org/10.3390/mi14101887
Zhang X, Liu Y, Xu C, Liao X, Chen D, Yang Y. A Fast Simulation Method for Evaluating the Single-Event Effect in Aerospace Integrated Circuits. Micromachines. 2023; 14(10):1887. https://doi.org/10.3390/mi14101887
Chicago/Turabian StyleZhang, Xiaorui, Yi Liu, Changqing Xu, Xinfang Liao, Dongdong Chen, and Yintang Yang. 2023. "A Fast Simulation Method for Evaluating the Single-Event Effect in Aerospace Integrated Circuits" Micromachines 14, no. 10: 1887. https://doi.org/10.3390/mi14101887
APA StyleZhang, X., Liu, Y., Xu, C., Liao, X., Chen, D., & Yang, Y. (2023). A Fast Simulation Method for Evaluating the Single-Event Effect in Aerospace Integrated Circuits. Micromachines, 14(10), 1887. https://doi.org/10.3390/mi14101887