

Trajectories and Forces in Four-Electrode Chambers Operated in Object-Shift, Dielectrophoresis and Field-Cage Modes—Considerations from the System’s Point of View

Abstract
:1. Introduction
2. Theory
3. Materials and Methods
4. Results and Discussion
4.1. General
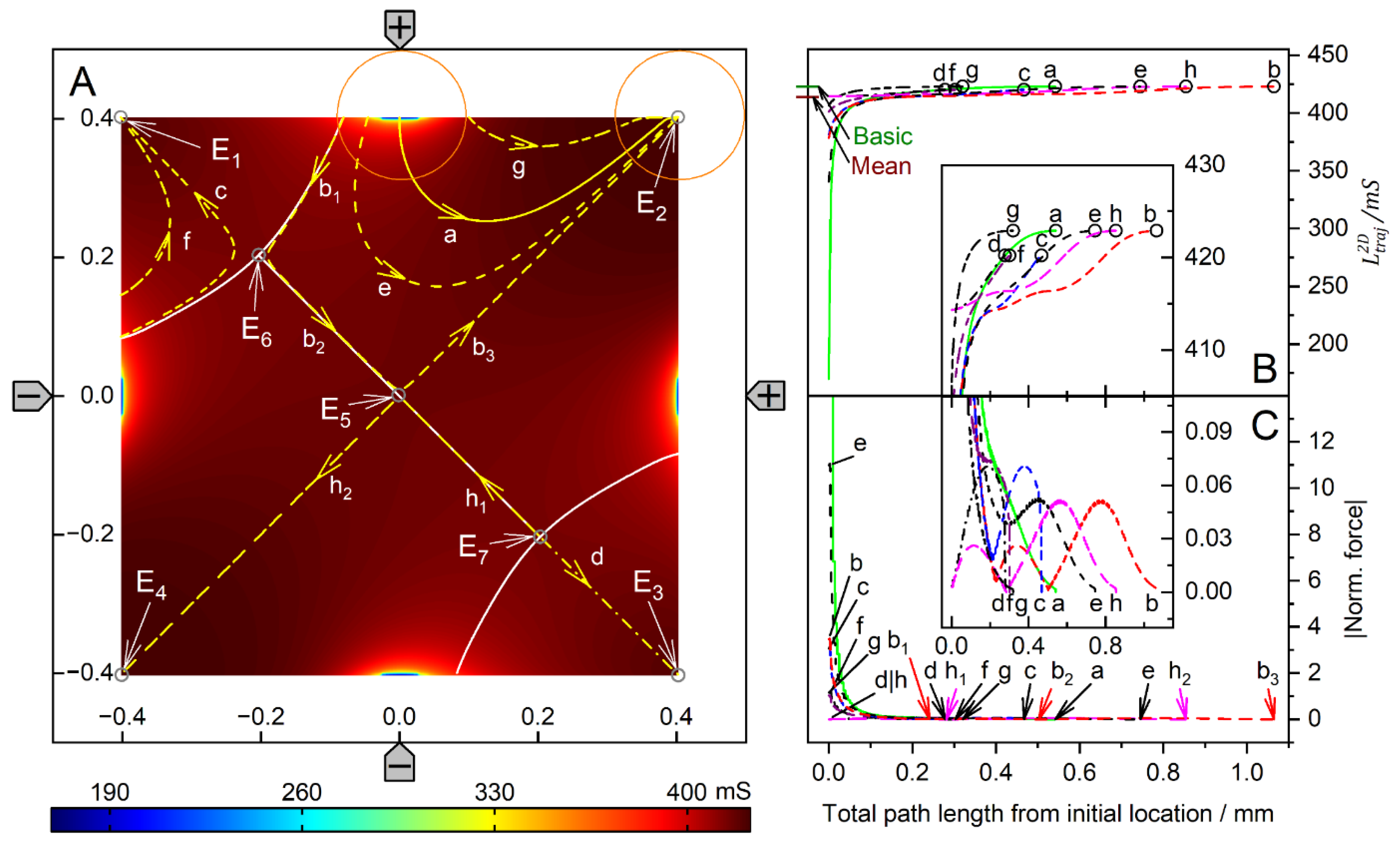
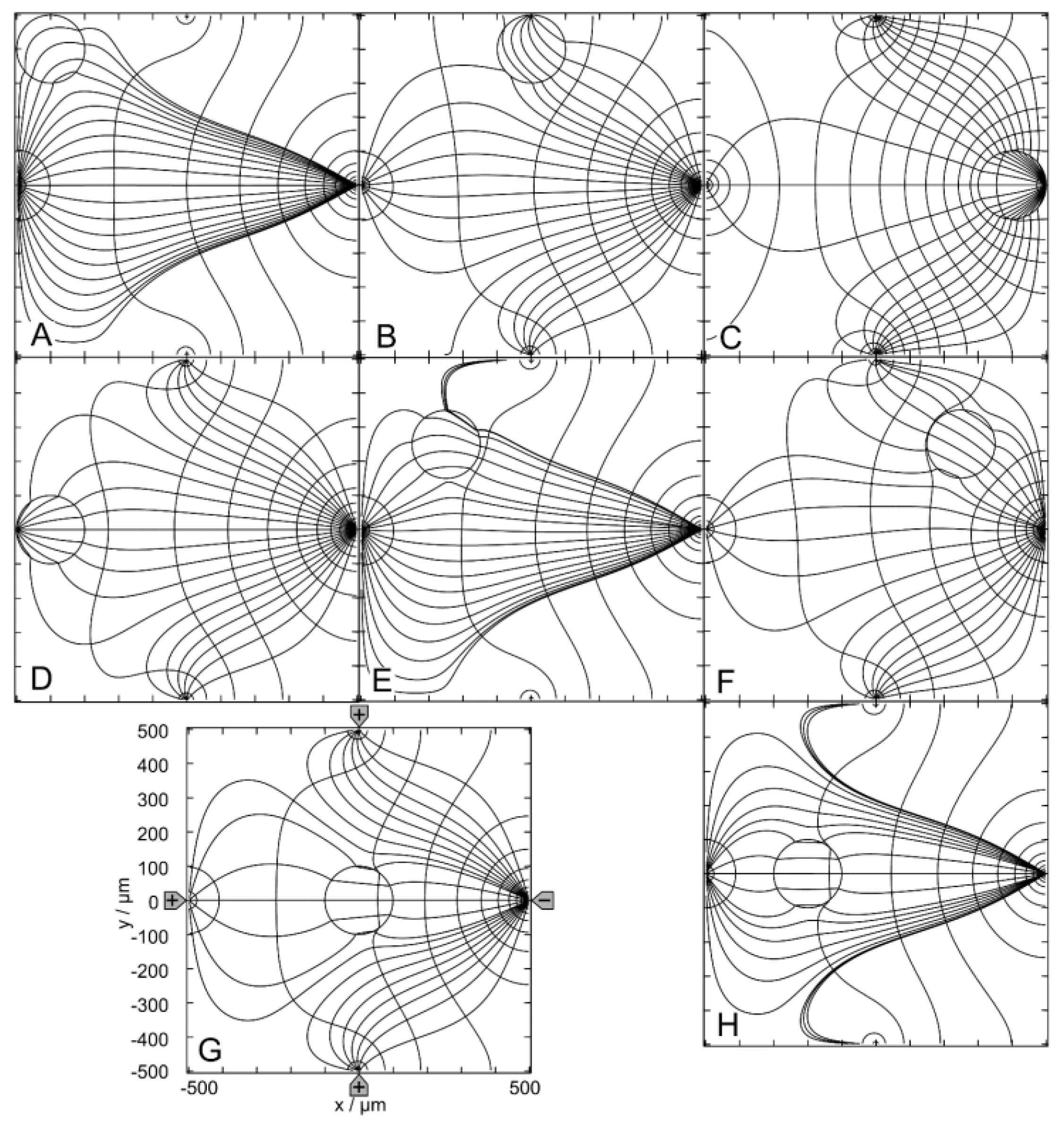
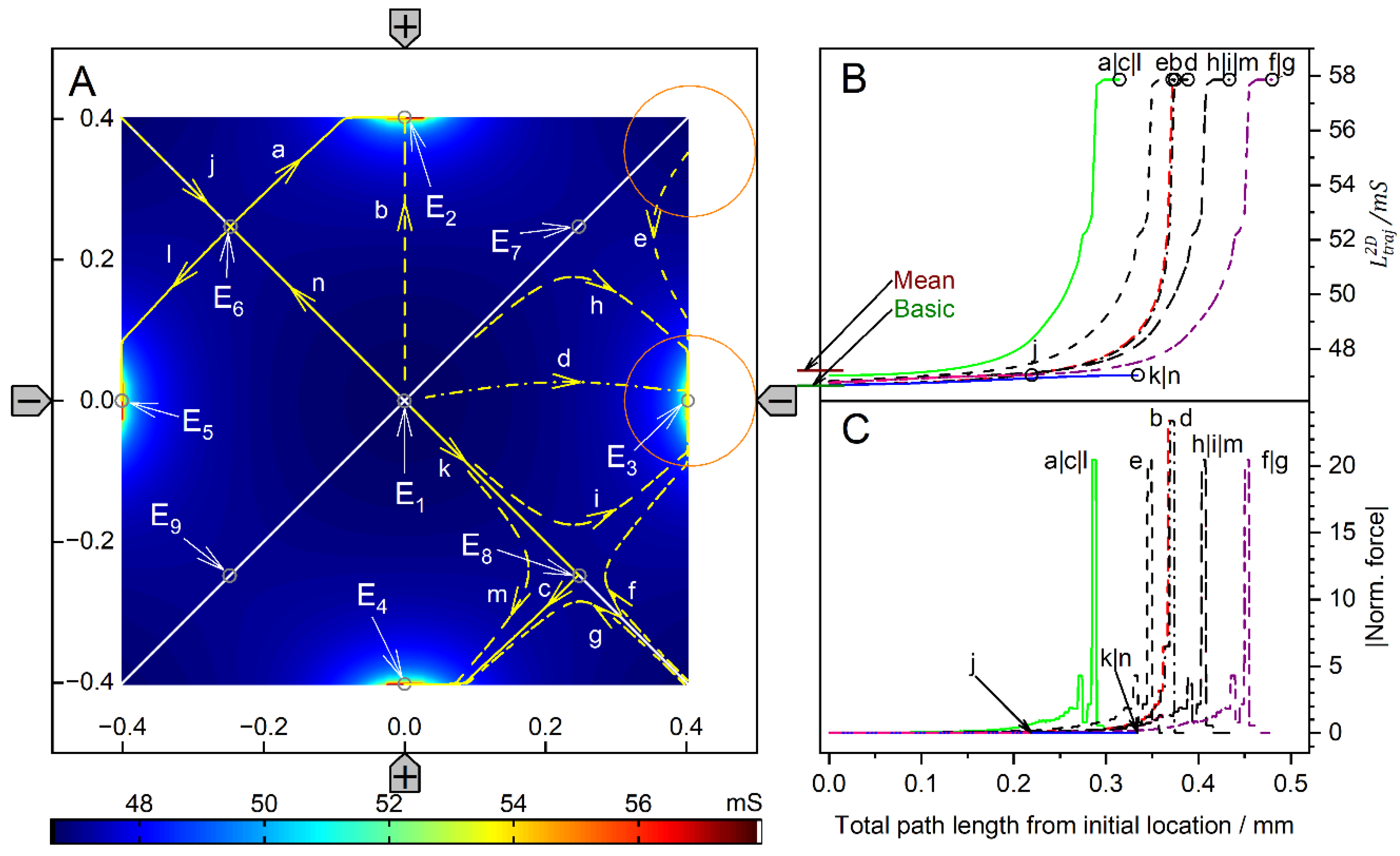
4.2. (++−−)—Drive Mode (Object-Shift Mode)
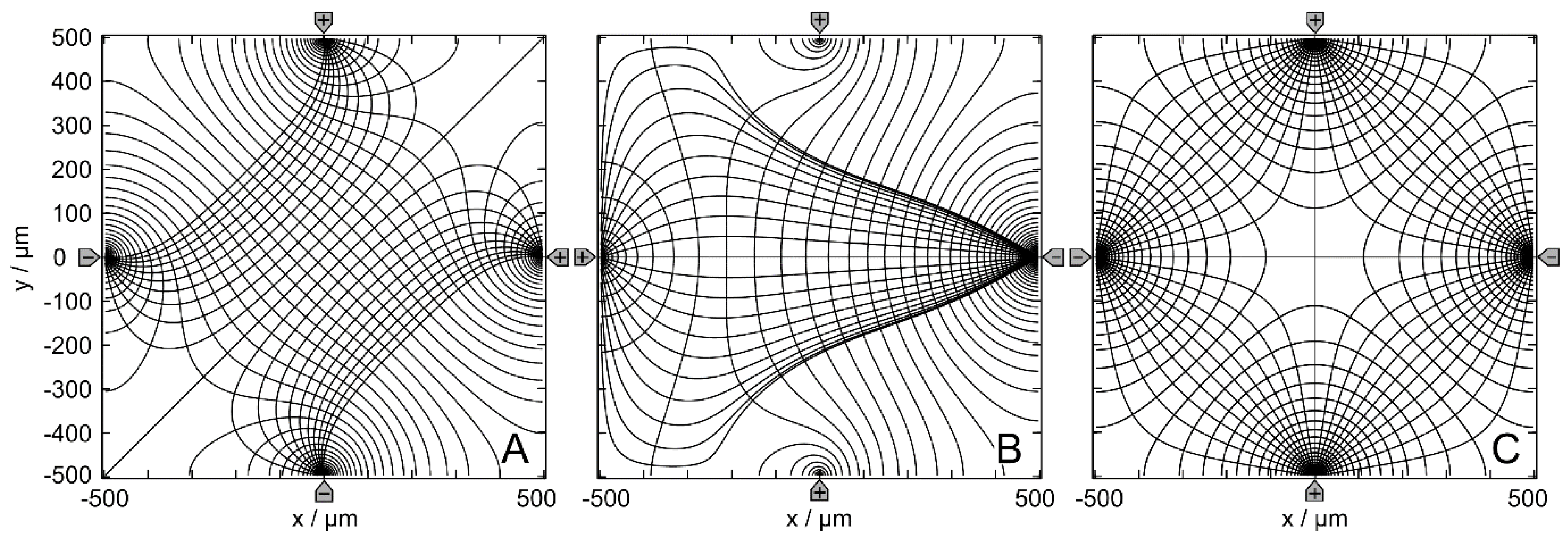
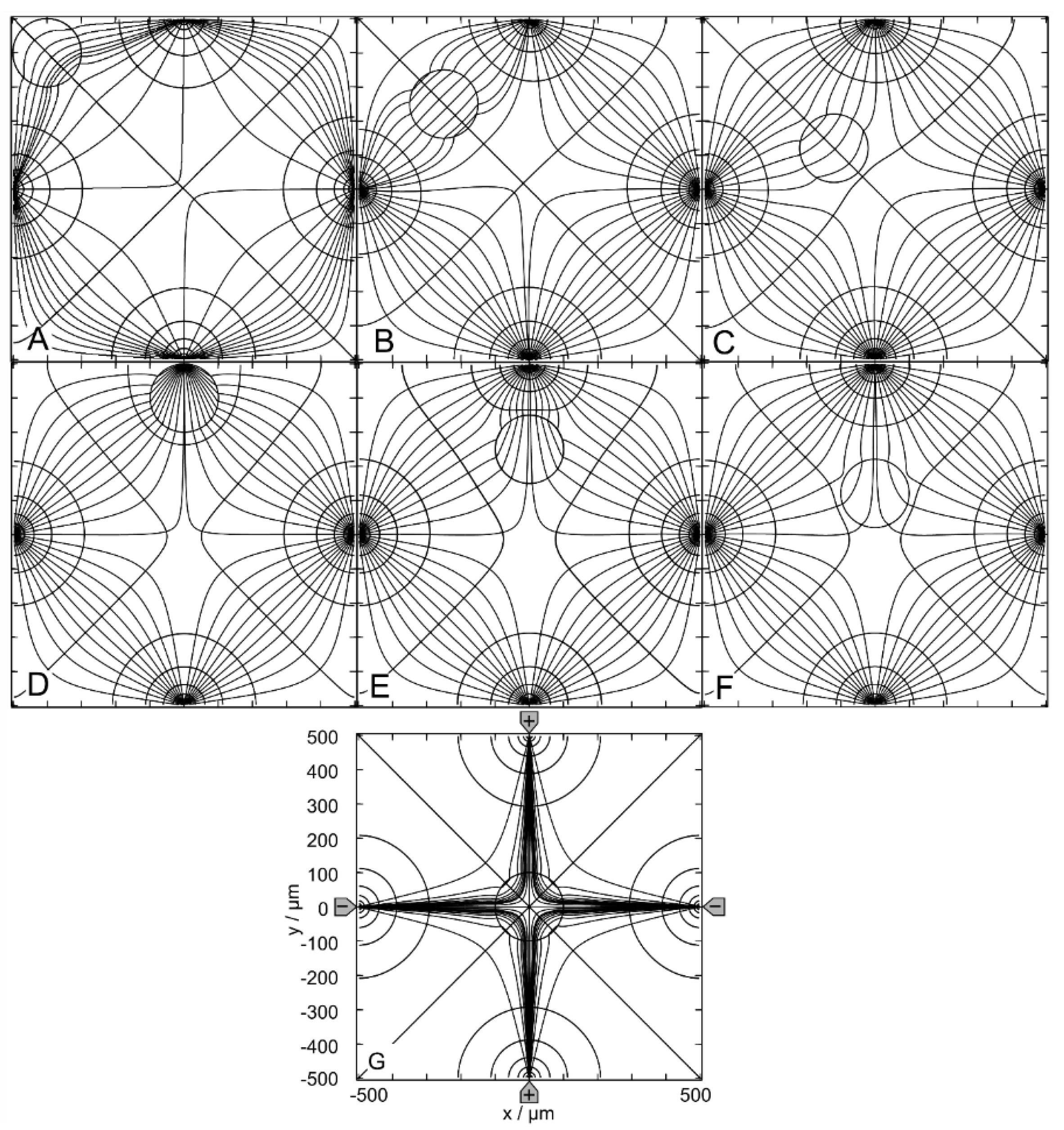
4.2.1. Field Distribution and Chamber Conductance
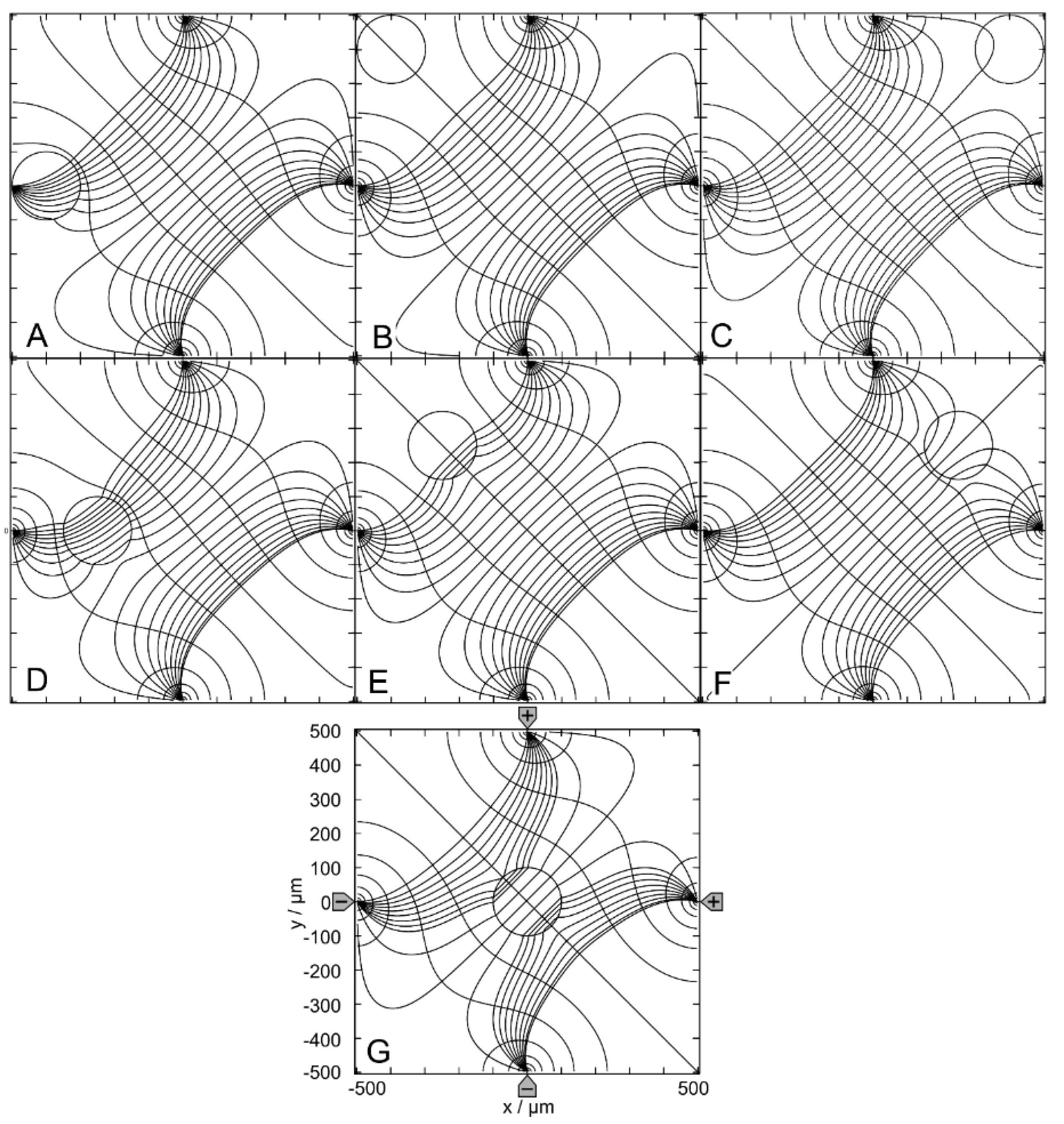
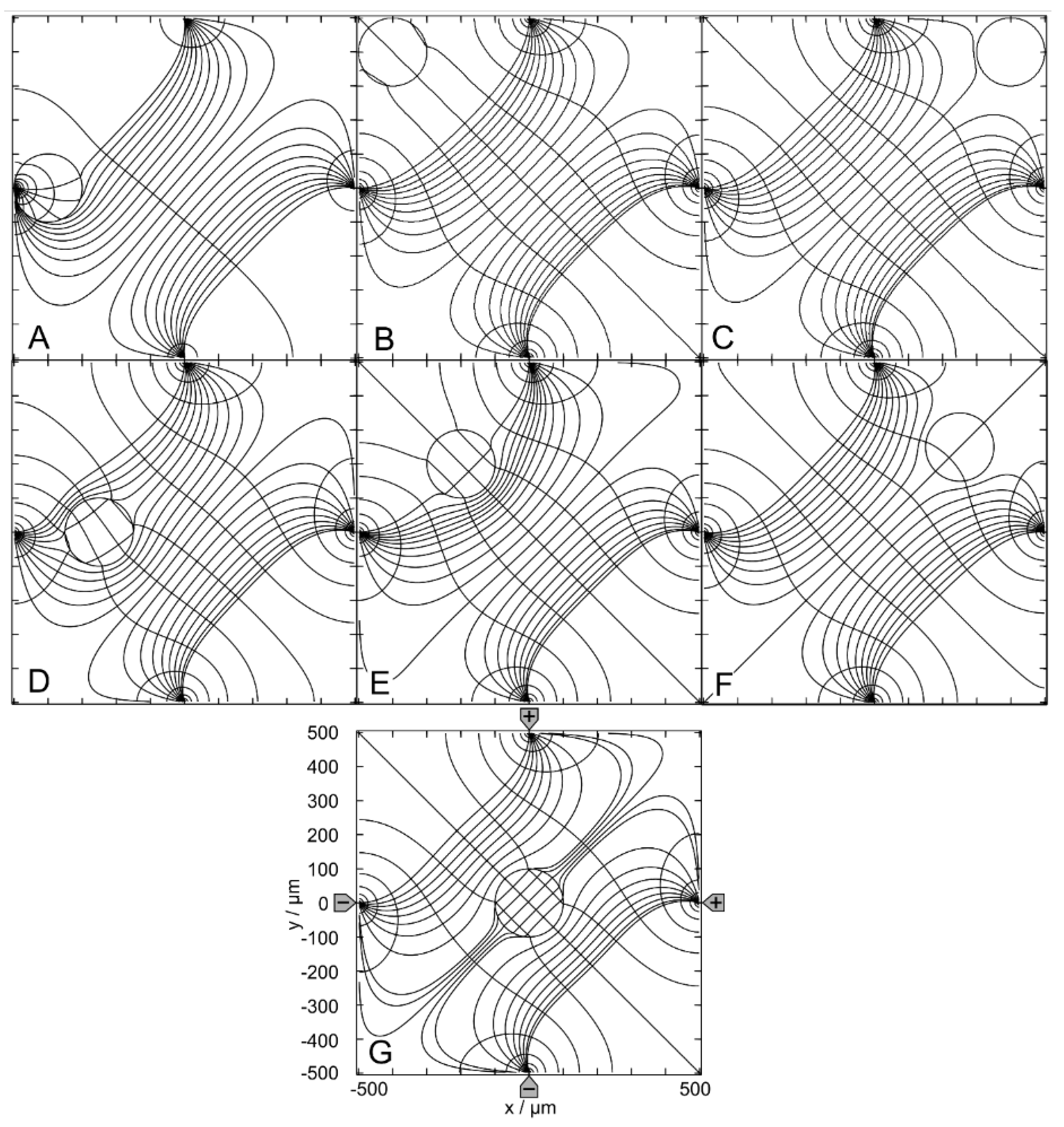
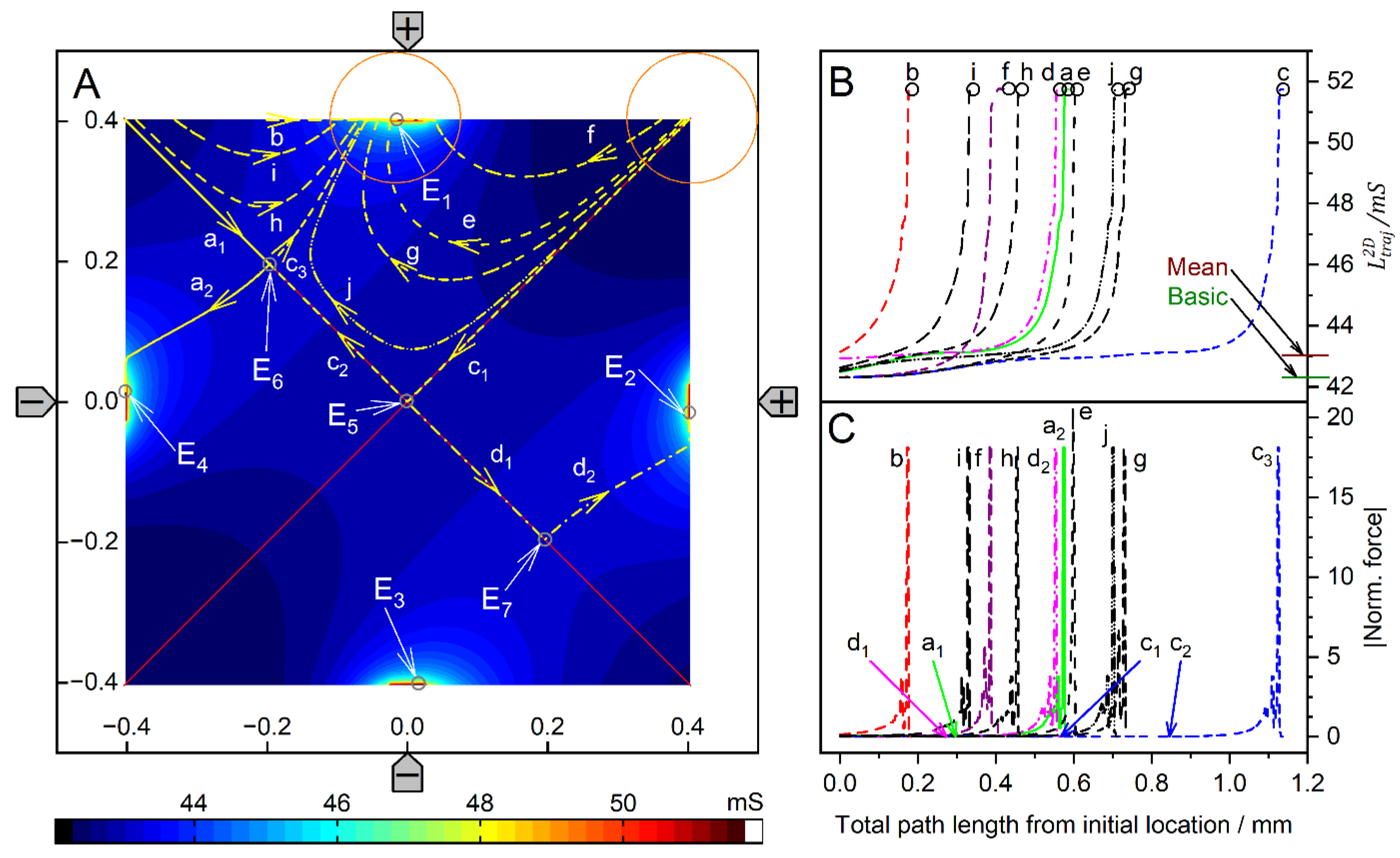
4.2.2. Trajectories and Forces
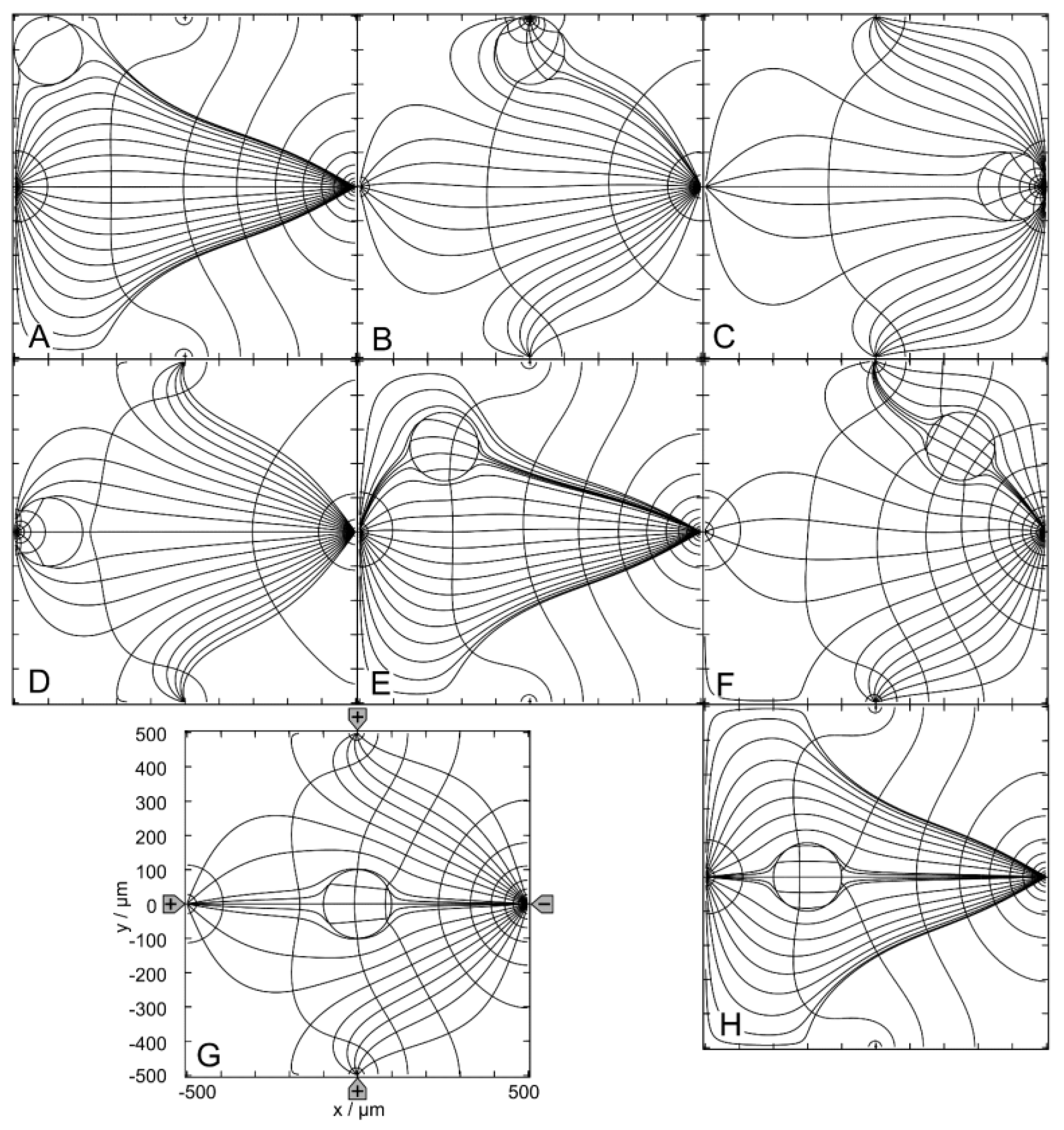
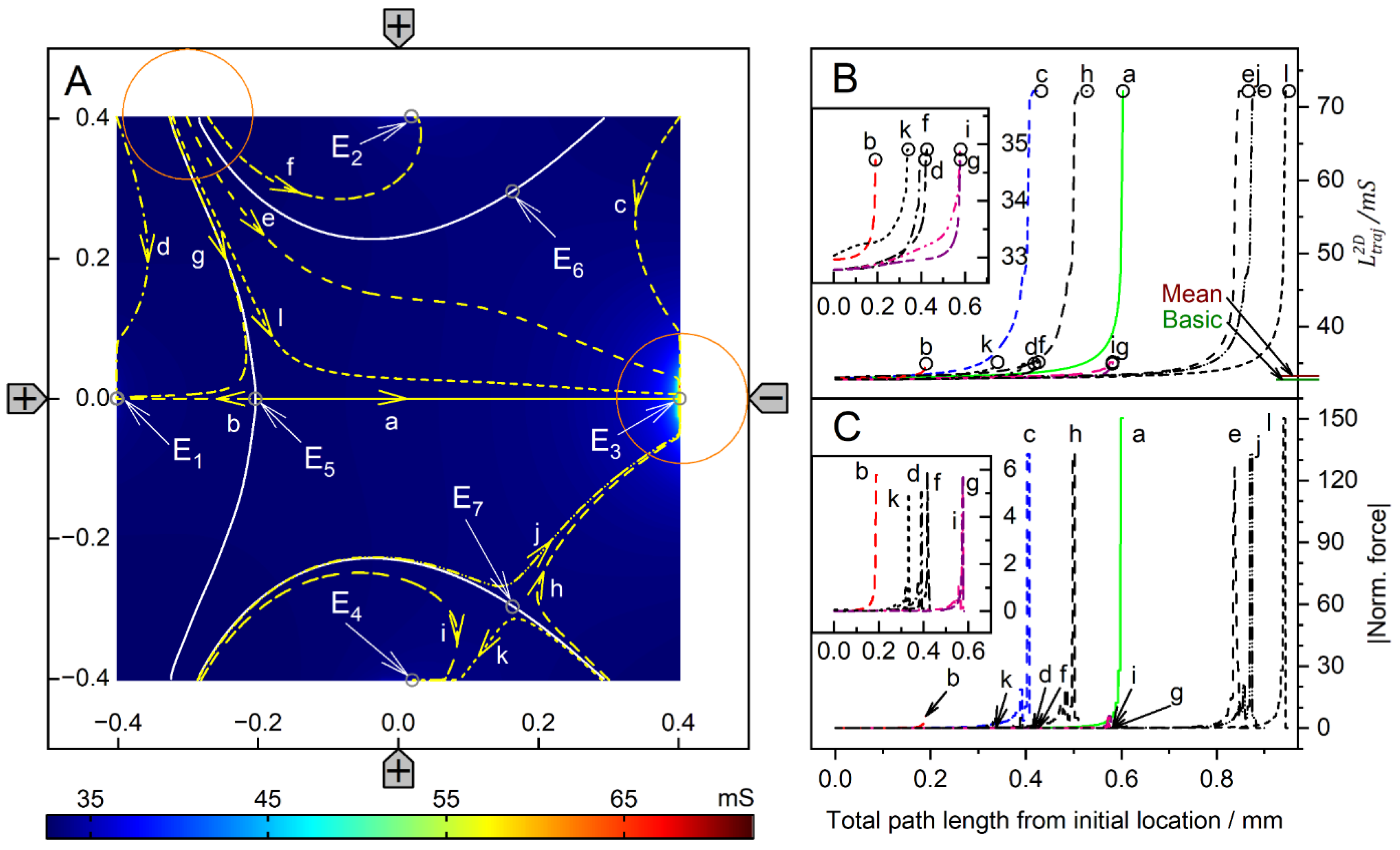
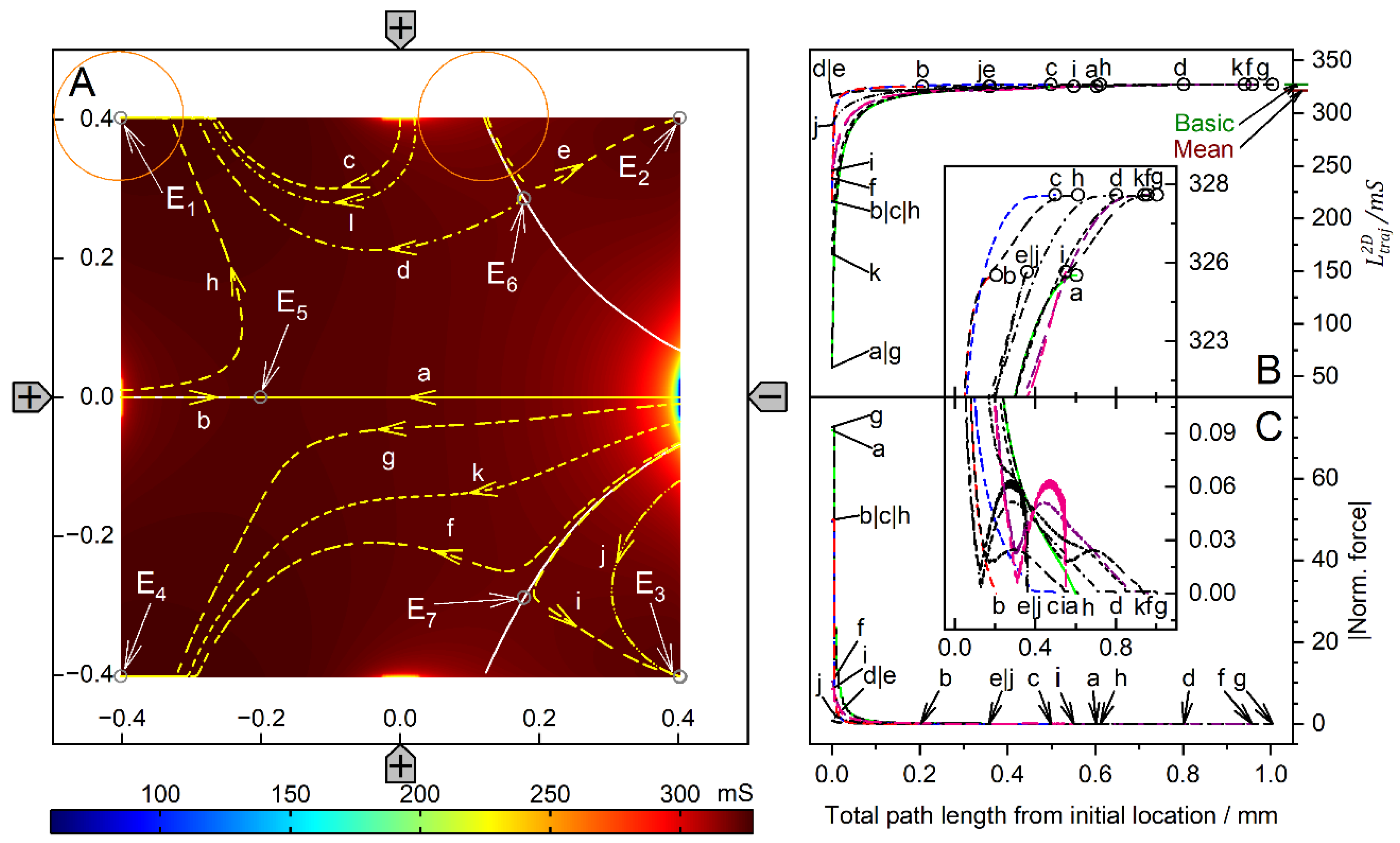
4.3. (+++−)—Drive Mode (DEP Mode)
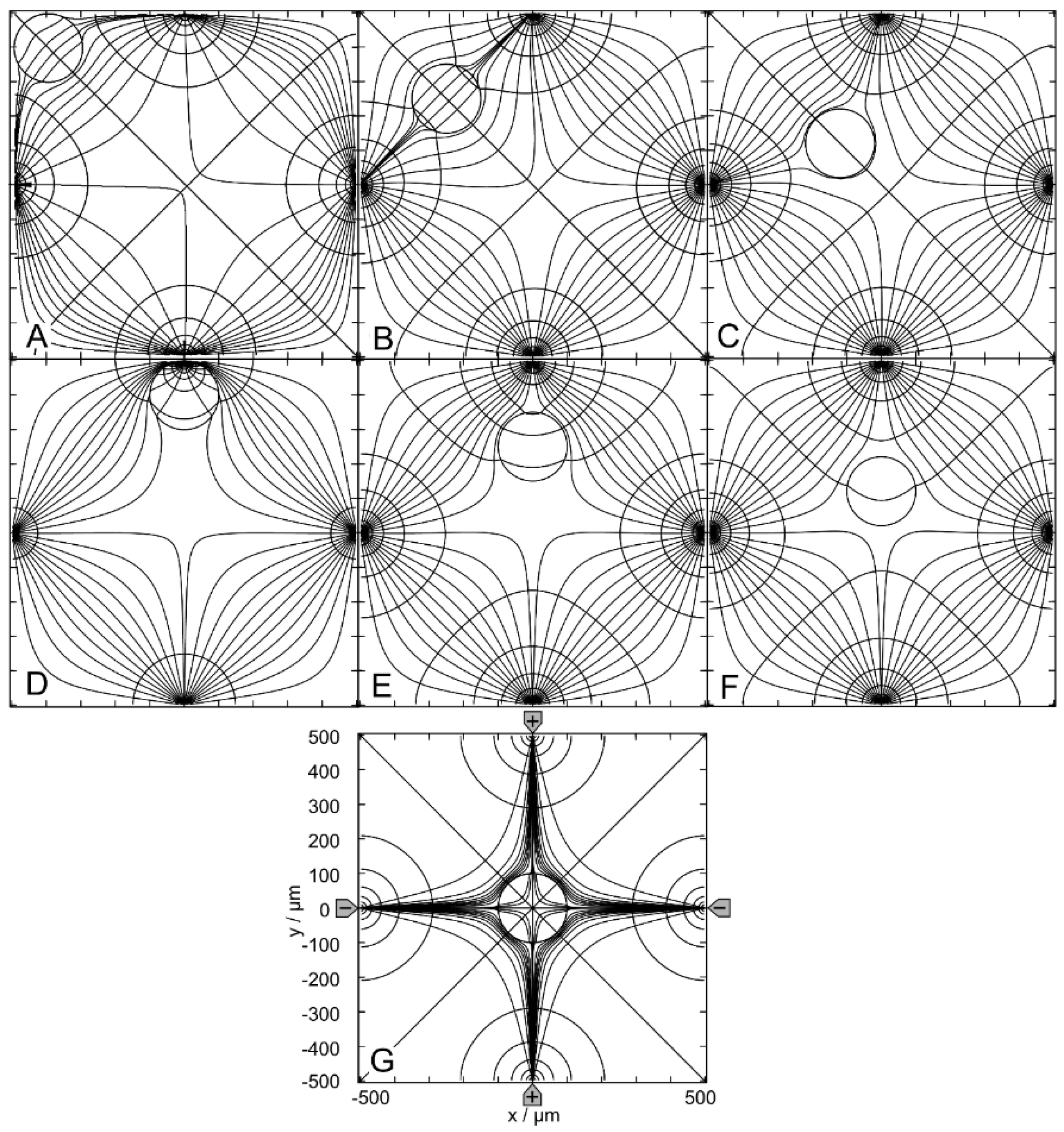
4.3.1. Field Distribution and Chamber Conductance
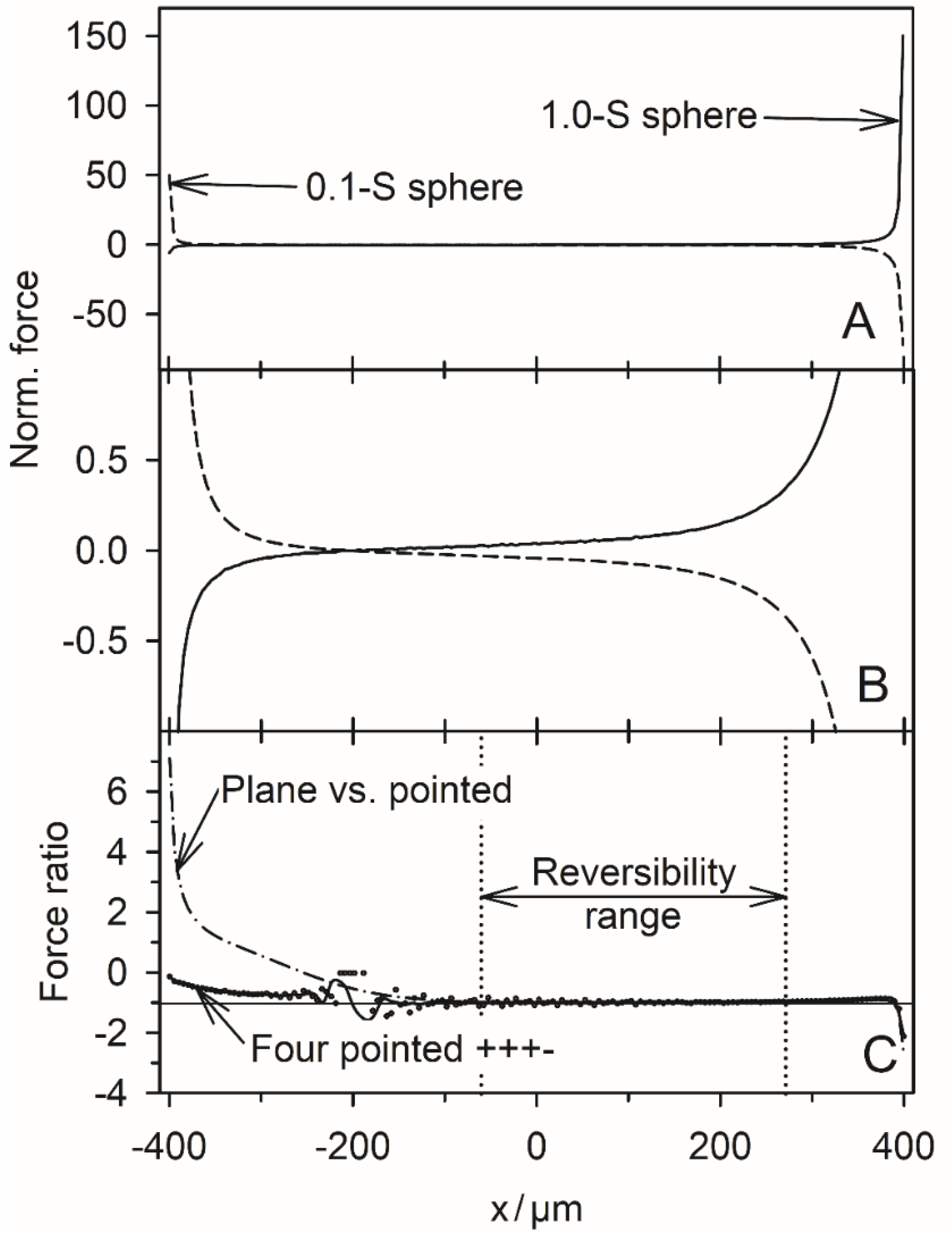
4.3.2. Trajectories and Forces
4.3.3. Relevance for DEP Measurements
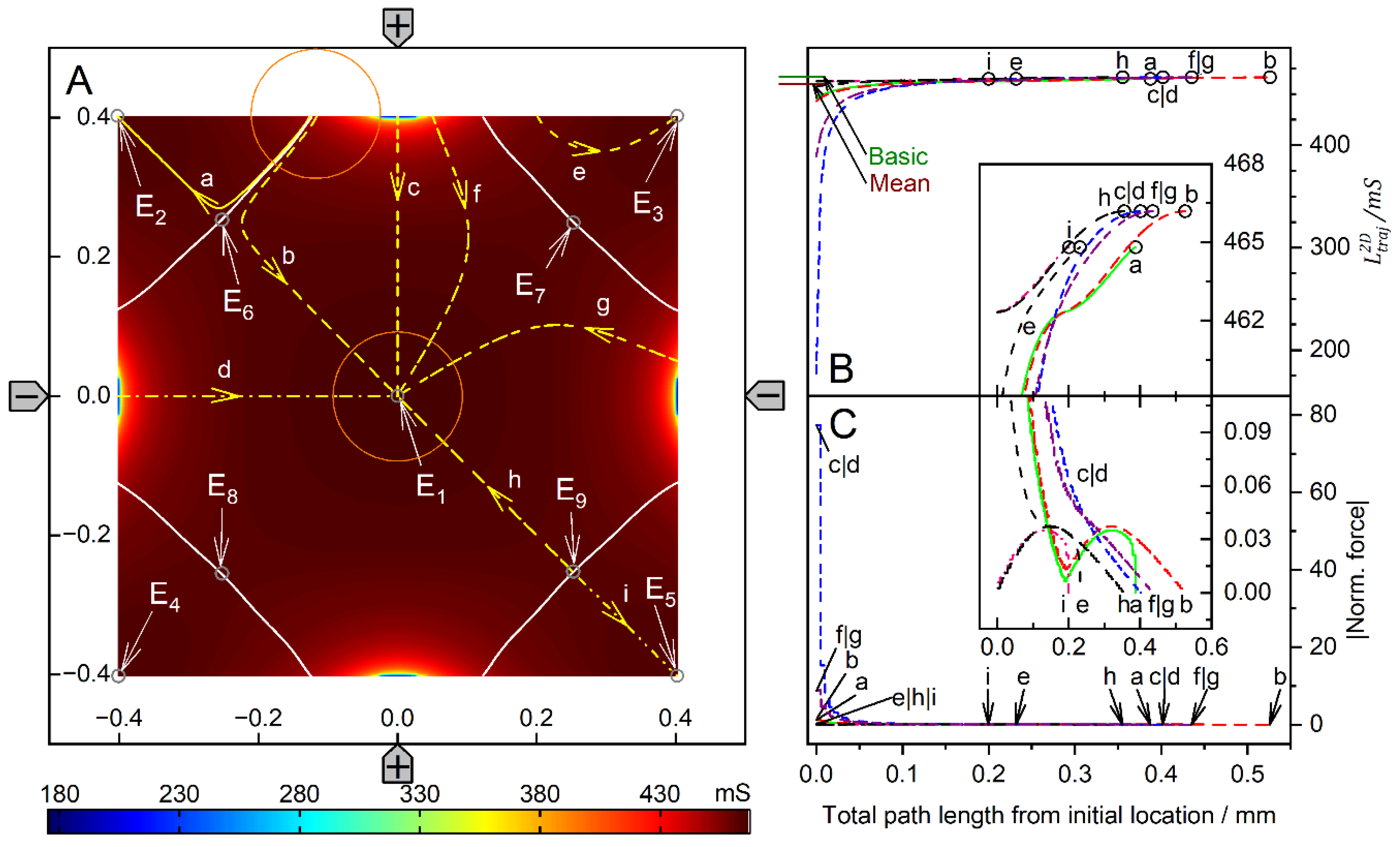
4.4. (+−+−)—Drive Mode (Field-Cage Mode)
4.4.1. Field Distribution and Chamber Conductance
4.4.2. Trajectories and Forces
5. General Discussion
5.1. Conductance Fields, Electric Work and Dissipation
5.2. Thermodynamic Aspects
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gimsa, J.; Radai, M.M. Dielectrophoresis from the System’s Point of View: A Tale of Inhomogeneous Object Polarization, Mirror Charges, High Repelling and Snap-to-Surface Forces and Complex Trajectories Featuring Bifurcation Points and Watersheds. Micromachines 2022, 13, 1002. [Google Scholar] [CrossRef] [PubMed]
- Gimsa, J.; Radai, M.M. The System’s Point of View Applied to Dielectrophoresis in Plate Capacitor and Pointed-versus-Pointed Electrode Chambers. Micromachines 2023, 14, 670. [Google Scholar] [CrossRef] [PubMed]
- Landau, L.D.; Lifšic, E.M.; Pitaevskij, L.P. Electrodynamics of Continuous Media, 2nd ed.; Pergamon Press: Oxford, UK, 1984; ISBN 0080302750. [Google Scholar]
- Grinstein, G.; Linsker, R. Comments on a derivation and application of the ‘maximum entropy production’ principle. J. Phys. A Math. Theor. 2007, 40, 9717–9720. [Google Scholar] [CrossRef]
- Martyushev, L.M.; Seleznev, V.D. Maximum entropy production principle in physics, chemistry and biology. Phys. Rep. 2006, 426, 1–45. [Google Scholar] [CrossRef]
- Swenson, R. The fourth law of thermodynamics or the law of maximum entropy production (LMEP). Chemistry 2009, 18, 333–339. [Google Scholar]
- Swenson, R. A grand unified theory for the unification of physics, life, information and cognition (mind). Philos. Trans. A Math. Phys. Eng. Sci. 2023, 381, 20220277. [Google Scholar] [CrossRef]
- Gimsa, J. Can the law of maximum entropy production describe the field-induced orientation of ellipsoids of rotation? J. Phys. Commun. 2020, 4, 085017. [Google Scholar] [CrossRef]
- Gimsa, J. Active, Reactive, and Apparent Power in Dielectrophoresis: Force Corrections from the Capacitive Charging Work on Suspensions Described by Maxwell-Wagner’s Mixing Equation. Micromachines 2021, 12, 738. [Google Scholar] [CrossRef]
- Scaife, B. On the Rayleigh dissipation function for dielectric media. J. Mol. Liq. 1989, 43, 101–107. [Google Scholar] [CrossRef]
- Rosenfeld, M.; Tanami, R.; Abboud, S. Numerical solution of the potential due to dipole sources in volume conductors with arbitrary geometry and conductivity. IEEE Trans. Biomed. Eng. 1996, 43, 679–689. [Google Scholar] [CrossRef]
- Gimsa, J.; Marszalek, P.; Löwe, U.; Tsong, T.Y. Dielectrophoresis and electrorotation of neurospora slime and murine myeloma cells. Biophys. J. 1991, 60, 749–760. [Google Scholar] [CrossRef]
- Pethig, R.; Menachery, A.; Pells, S.; de Sousa, P. Dielectrophoresis: A review of applications for stem cell research. J. Biomed. Biotechnol. 2010, 2010, 182581. [Google Scholar] [CrossRef] [PubMed]
- Gimsa, J. Combined AC-electrokinetic effects: Theoretical considerations on a three-axial ellipsoidal model. Electrophoresis 2018, 39, 1339–1348. [Google Scholar] [CrossRef] [PubMed]
- Ramos, A.; Morgan, H.; Green, N.G.; Castellanos, A. AC electrokinetics: A review of forces in microelectrode structures. J. Phys. D Appl. Phys. 1998, 31, 2338–2353. [Google Scholar] [CrossRef]
- Reichle, C.; Müller, T.; Schnelle, T.; Fuhr, G. Electro-rotation in octopole micro cages. J. Phys. D Appl. Phys. 1999, 32, 2128–2135. [Google Scholar] [CrossRef]
- Pethig, R. Protein Dielectrophoresis: A Tale of Two Clausius-Mossottis or Something Else? Micromachines 2022, 13, 261. [Google Scholar] [CrossRef] [PubMed]
- Broche, L.M.; Labeed, F.H.; Hughes, M.P. Extraction of dielectric properties of multiple populations from dielectrophoretic collection spectrum data. Phys. Med. Biol. 2005, 50, 2267–2274. [Google Scholar] [CrossRef]
- Dürr, M.; Kentsch, J.; Müller, T.; Schnelle, T.; Stelzle, M. Microdevices for manipulation and accumulation of micro- and nanoparticles by dielectrophoresis. Electrophoresis 2003, 24, 722–731. [Google Scholar] [CrossRef]
- Fritzsch, F.S.O.; Blank, L.M.; Dusny, C.; Schmid, A. Miniaturized octupole cytometry for cell type independent trapping and analysis. Microfluid. Nanofluid. 2017, 21, 130. [Google Scholar] [CrossRef]
- Kang, Y.; Li, D. Electrokinetic motion of particles and cells in microchannels. Microfluid. Nanofluid. 2009, 6, 431–460. [Google Scholar] [CrossRef]
- Foster, K.R.; Schwan, H.P. Dielectric Properties of Tissues, 2nd ed.; CRC Press: Boca Raton, FL, USA, 1996; pp. 25–102. [Google Scholar]
- Gimsa, J.; Stubbe, M.; Gimsa, U. A short tutorial contribution to impedance and AC-electrokinetic characterization and manipulation of cells and media: Are electric methods more versatile than acoustic and laser methods? J. Electr. Bioimpedance 2014, 5, 74–91. [Google Scholar] [CrossRef]
- Prigogine, I. Introduction to Thermodynamics of Irreversible Processes, 3rd ed.; Interscience Publishers: New York, NY, USA, 1967; ISBN 0470699280. [Google Scholar]
- Onsager, L.; Machlup, S. Fluctuations and Irreversible Processes. Phys. Rev. 1953, 91, 1505–1512. [Google Scholar] [CrossRef]
- Stenholm, S. On entropy production. Ann. Phys. 2008, 323, 2892–2904. [Google Scholar] [CrossRef]
- Huang, J.P.; Karttunen, M.; Yu, K.W.; Dong, L.; Gu, G.Q. Electrokinetic behavior of two touching inhomogeneous biological cells and colloidal particles: Effects of multipolar interactions. Phys. Rev. E 2004, 69, 51402. [Google Scholar] [CrossRef]
- Liu, W.; Ren, Y.; Tao, Y.; Yan, H.; Xiao, C.; Wu, Q. Buoyancy-Free Janus Microcylinders as Mobile Microelectrode Arrays for Continuous Microfluidic Biomolecule Collection within a Wide Frequency Range: A Numerical Simulation Study. Micromachines 2020, 11, 289. [Google Scholar] [CrossRef] [PubMed]
- Müller, T.; Pfennig, A.; Klein, P.; Gradl, G.; Jäger, M.; Schnelle, T. The potential of dielectrophoresis for single-cell experiments: The Achievements, Limitations, and Possibilities of Combining Dielectric Elements with Microfluidics for Live Cell Processing. IEEE Eng. Med. Biol. Mag. 2003, 22, 51–61. [Google Scholar] [CrossRef]
- Stuke, M.; Müller, K.; Müller, T.; Hagedorn, R.; Jaeger, M.; Fuhr, G. Laser-direct-write creation of three-dimensional OREST microcages for contact-free trapping, handling and transfer of small polarizable neutral objects in solution. Appl. Phys. A 2005, 81, 915–922. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | ++−− | +++− | +−+− | |||
|---|---|---|---|---|---|---|
| Conductance | 1.0-in-0.1 | 0.1-in-1.0 | 1.0-in-0.1 | 0.1-in-1.0 | 1.0-in-0.1 | 0.1-in-1.0 |
| Basic (w/o sphere) | 42.3103 | 422.9419 | 32.7518 | 327.3895 | 46.6665 | 466.4686 |
| Minimum | 42.3132 | 169.6693 | 32.7567 | 58.4465 | 46.6926 | 176.8777 |
| Mean | 43.0311 | 414.1074 | 33.2723 | 321.3707 | 47.2079 | 459.3097 |
| Maximum | 51.7546 | 422.9101 | 72.1644 | 327.3172 | 57.8512 | 466.1858 |
| A | 51.6242 | 172.9551 | 32.7572 | 327.3137 | 46.7797 | 464.7503 |
| B | 42.4985 | 420.1077 | 35.0269 | 217.9206 | 47.0445 | 462.2856 |
| C | 42.3139 | 422.9059 | 72.1854 | 60.0215 | 46.8354 | 464.6568 |
| D | 43.0865 | 414.6169 | 34.9014 | 218.8037 | 57.8507 | 180.4669 |
| E | 43.0702 | 414.2677 | 32.8186 | 326.6342 | 47.0987 | 461.7775 |
| F | 42.4621 | 421.2087 | 33.3379 | 321.0329 | 46.7698 | 465.3648 |
| G | 42.9407 | 416.3622 | 33.0919 | 323.8072 | 46.6926 | 466.1859 |
| H | -- | -- | 32.9595 | 325.1618 | -- | -- |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gimsa, J.; Radai, M.M. Trajectories and Forces in Four-Electrode Chambers Operated in Object-Shift, Dielectrophoresis and Field-Cage Modes—Considerations from the System’s Point of View. Micromachines 2023, 14, 2042. https://doi.org/10.3390/mi14112042
Gimsa J, Radai MM. Trajectories and Forces in Four-Electrode Chambers Operated in Object-Shift, Dielectrophoresis and Field-Cage Modes—Considerations from the System’s Point of View. Micromachines. 2023; 14(11):2042. https://doi.org/10.3390/mi14112042
Chicago/Turabian StyleGimsa, Jan, and Michal M. Radai. 2023. "Trajectories and Forces in Four-Electrode Chambers Operated in Object-Shift, Dielectrophoresis and Field-Cage Modes—Considerations from the System’s Point of View" Micromachines 14, no. 11: 2042. https://doi.org/10.3390/mi14112042
APA StyleGimsa, J., & Radai, M. M. (2023). Trajectories and Forces in Four-Electrode Chambers Operated in Object-Shift, Dielectrophoresis and Field-Cage Modes—Considerations from the System’s Point of View. Micromachines, 14(11), 2042. https://doi.org/10.3390/mi14112042