
A Control Method Based on a Simple Dynamic Optimizer: An Application to Micromachines with Friction


Abstract
:1. Introduction
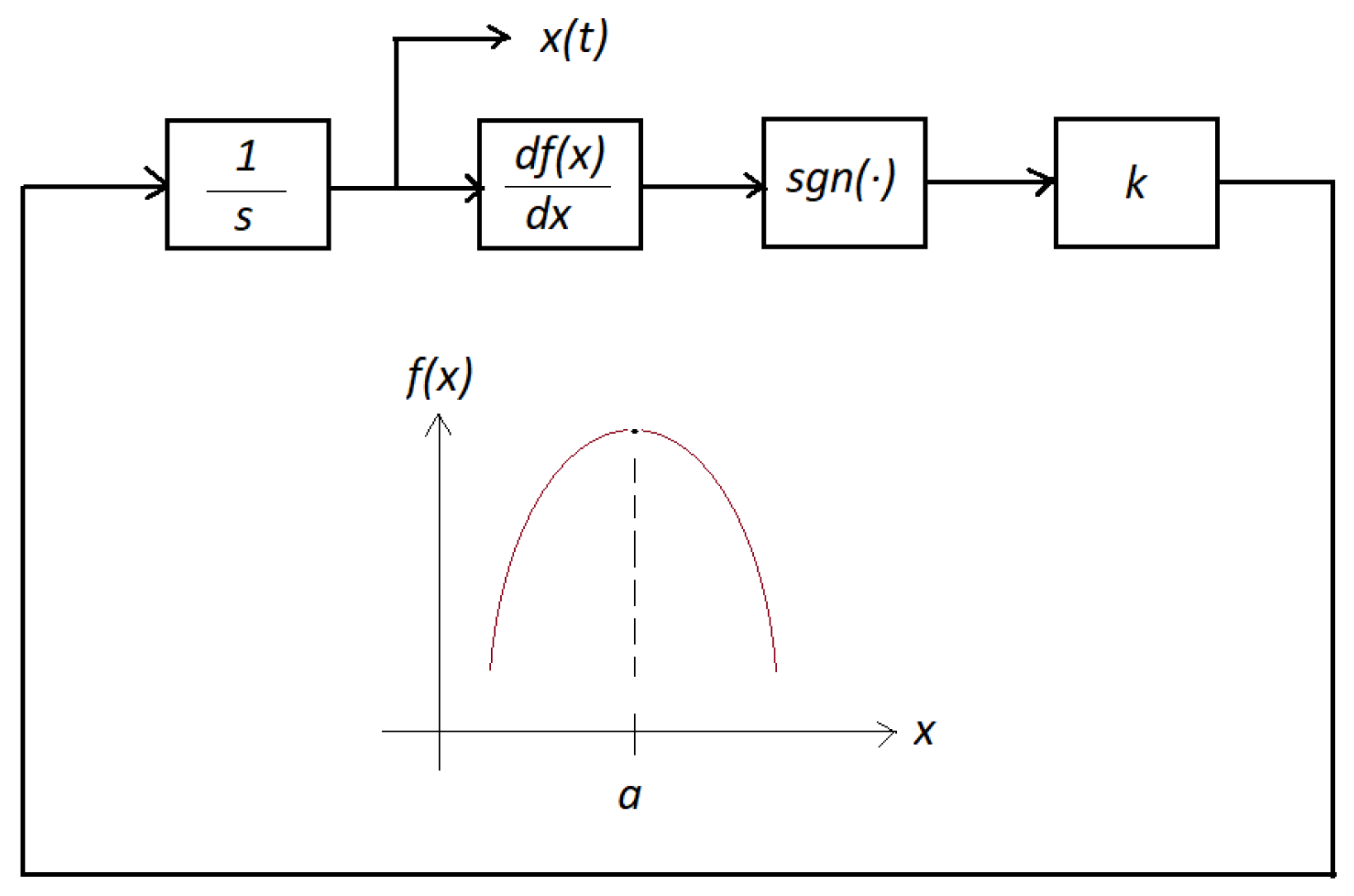
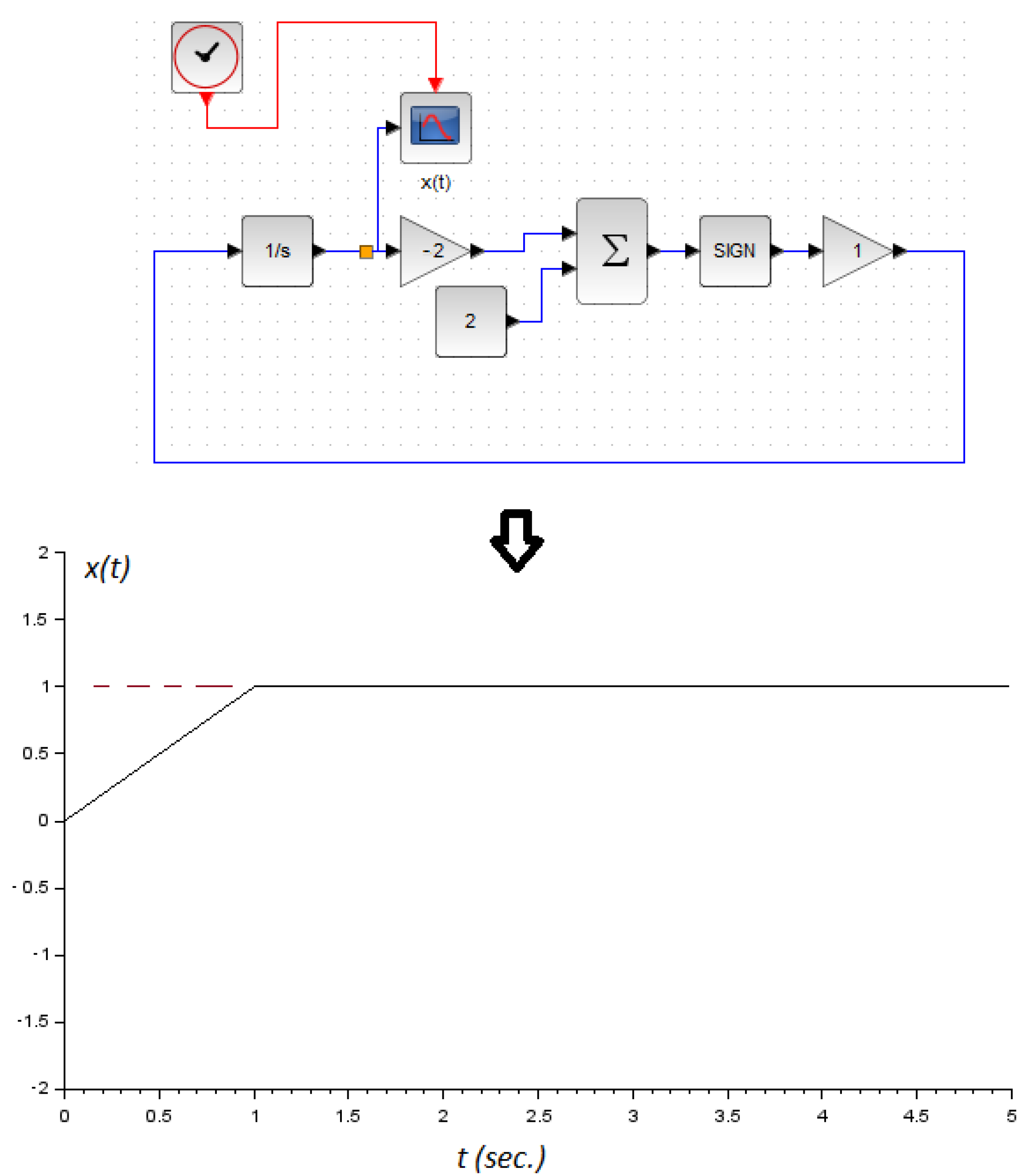
2. The Benchmark Dynamic Optimizer
- There is only one maximum point of the function.
- The function is concave.
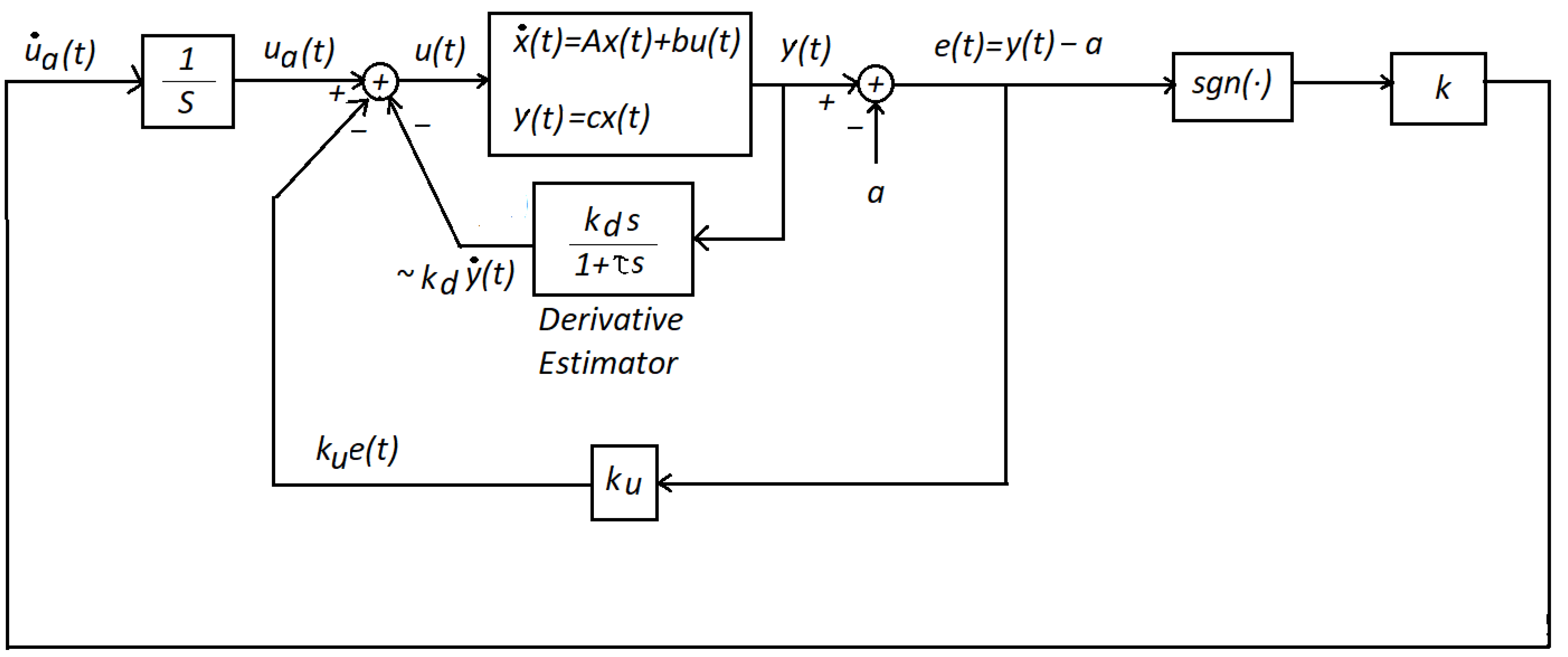
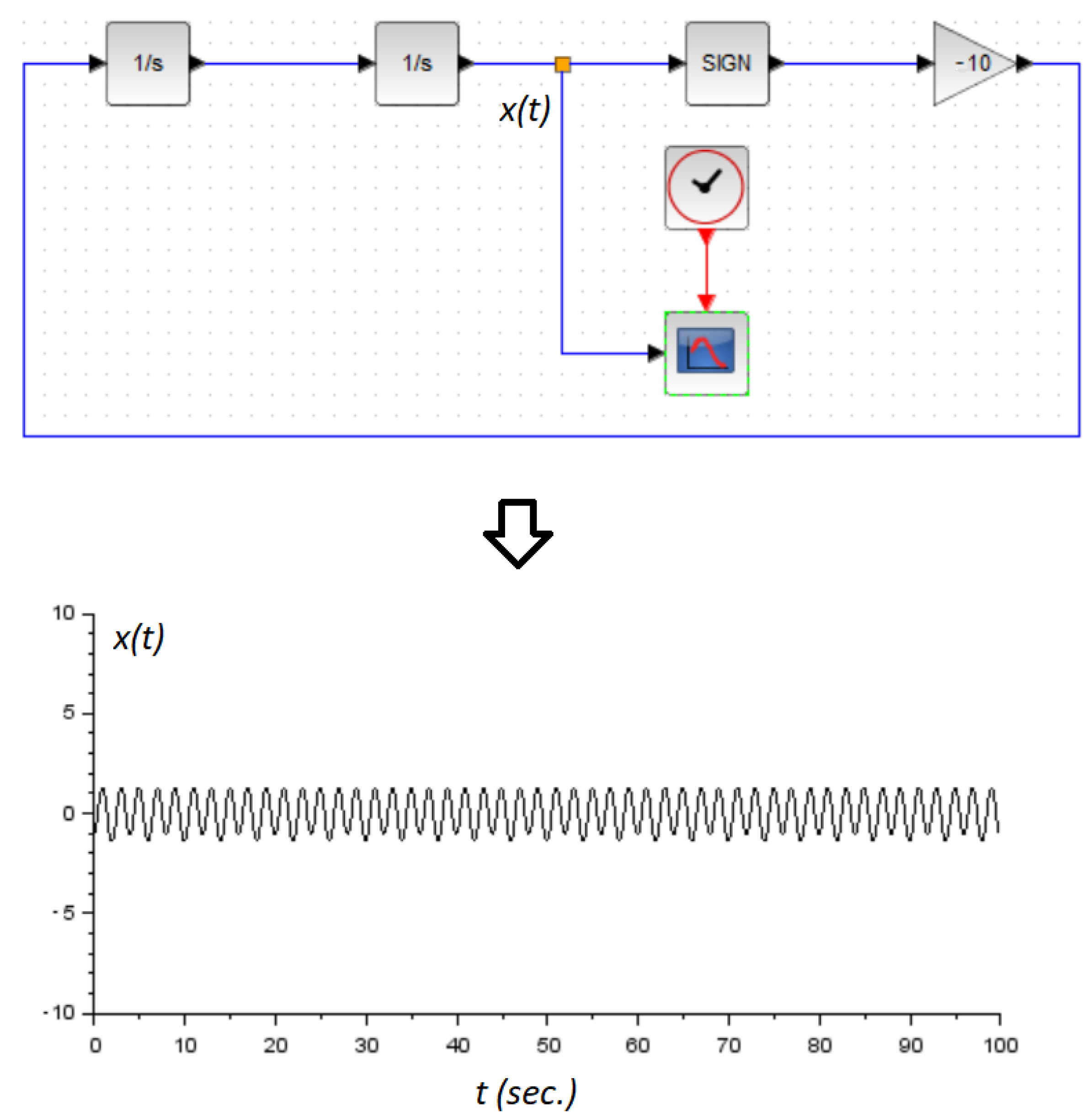
3. The Recent Control Scheme
- There is a real constant value such that , with ,
- There is a real constant value such that , with ,
- There is a real constant value k such that , with .
- The parameter was sufficiently large with respect to (),
- The relation was sufficiently small ().
- ; ,
- ; ,
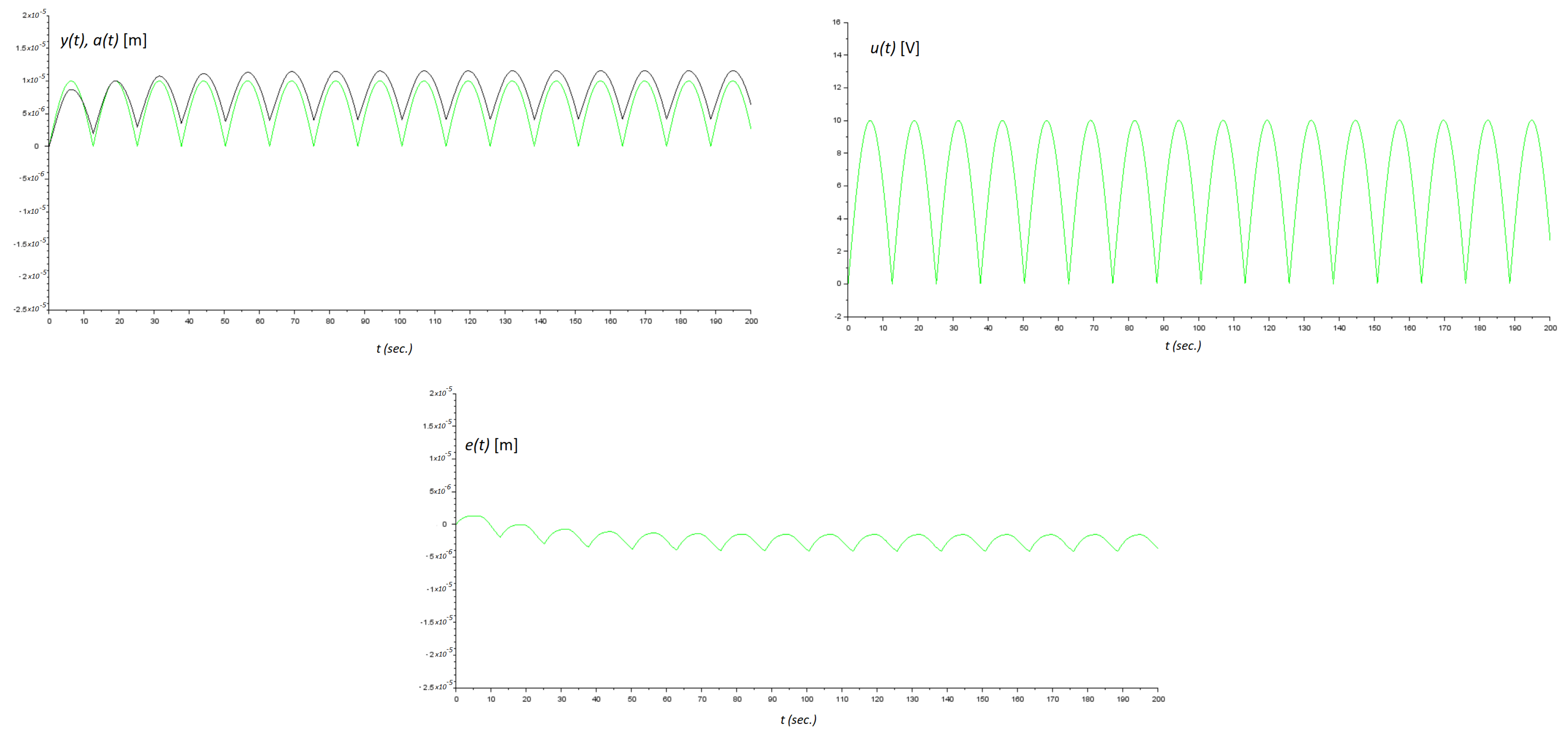
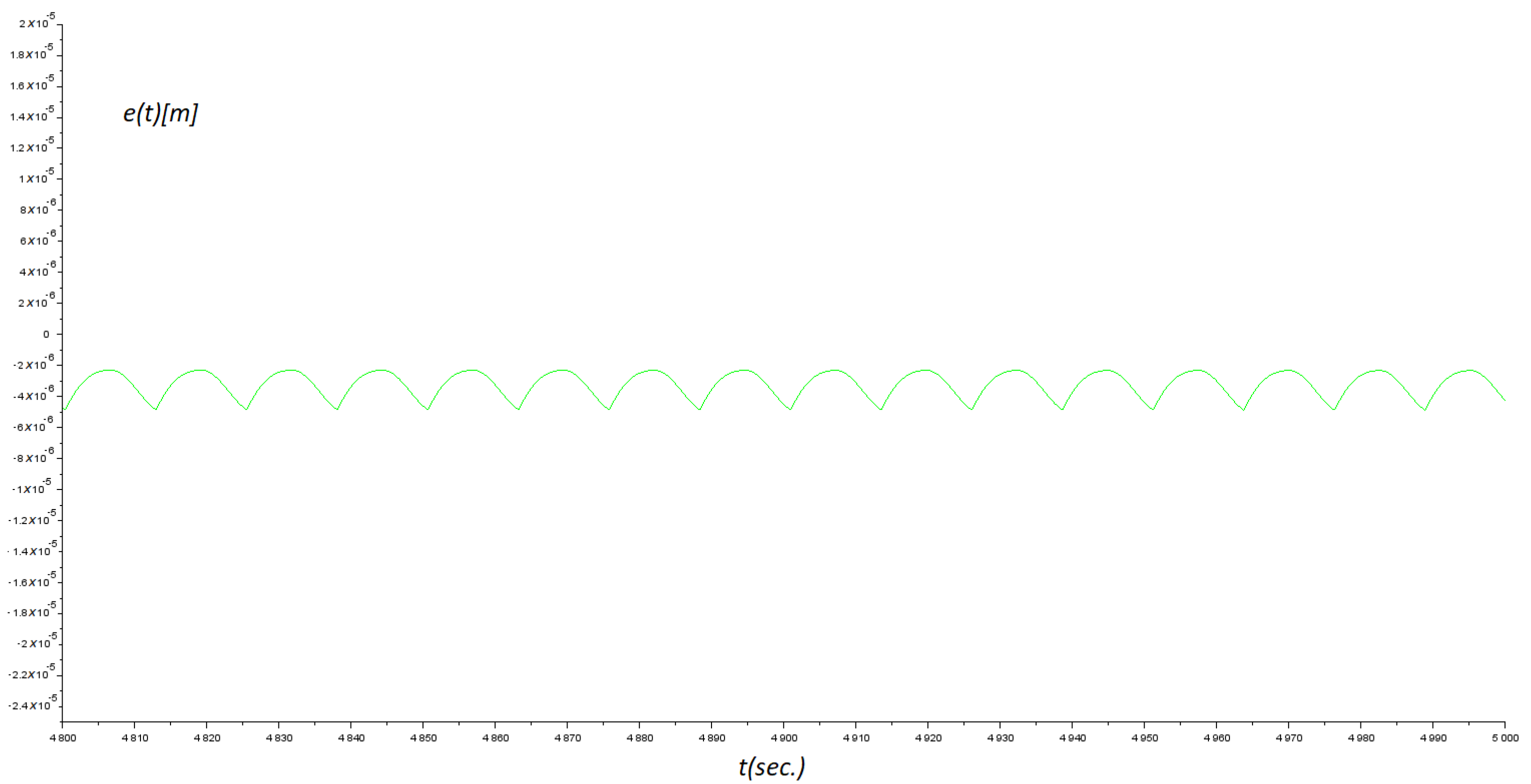
4. Application to a Micromachine Device
5. Future Work
6. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, G.; Xu, Q. LuGre model based hysteresis compensation of a piezo-actuated mechanism. In Proceedings of the International Conference on Intelligent Autonomous Systems, Shanghai, China, 3–7 July 2016; pp. 645–657. [Google Scholar]
- Liu, Y.T.; Chang, K.M.; Li, W.Z. Model reference adaptive control for a piezo-positioning system. Precis. Eng. 2010, 34, 62–69. [Google Scholar] [CrossRef]
- Lin, J.; Chiang, H.; Lin, C. Tuning PID control parameters for micro-piezo-stage by using grey relational analysis. Expert Syst. Appl. 2011, 38, 13924–13932. [Google Scholar] [CrossRef]
- Edeler, C.; Meyer, I.; Fatikow, S. Modeling of stick-slip micro-drives. J. Micro-Nano Mechatron. 2011, 6, 65–87. [Google Scholar] [CrossRef]
- Ounissi, A.; Yakoub, K.; Kaddouri, A.; Abdessemed, R. Robust adaptive displacement tracking control of a piezo-actuated stage. In Proceedings of the 2017 6th International Conference on Systems and Control (ICSC), Batna, Algeria, 7–9 May 2017; pp. 297–302. [Google Scholar]
- Fan, S.X.; Fan, D.P.; Hong, H.J.; Zhang, Z.Y. Robust tracking control for micro machine tools with load uncertainties. J. Cent. South Univ. 2012, 19, 117–127. [Google Scholar] [CrossRef]
- Dinh, T.X.; Ahn, K.K. Radial basis function neural network based adaptive fast nonsingular terminal sliding mode controller for piezo positioning stage. Int. J. Control Autom. Syst. 2017, 15, 2892–2905. [Google Scholar] [CrossRef]
- Acho, L. An educational example to the maximum power transfer objective in electric circuits using a PD-controlled DC—Driver. IFAC-PapersOnLine 2016, 49, 344–347. [Google Scholar] [CrossRef]
- Bryson, A.E. Optimal control-1950 to 1985. IEEE Control Syst. Mag. 1996, 16, 26–33. [Google Scholar] [CrossRef]
- Polak, E. An historical survey of computational methods in optimal control. SIAM Rev. 1973, 15, 553–584. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, S.; Liao, L. Near-optimal control of nonlinear dynamical systems: A brief survey. Annu. Rev. Control 2019, 47, 71–80. [Google Scholar] [CrossRef]
- Nešić, D. Extremum seeking control: Convergence analysis. Eur. J. Control 2009, 15, 331–347. [Google Scholar] [CrossRef]
- Salsbury, T.I.; House, J.M.; Alcala, C.F. Self-perturbing extremum-seeking controller with adaptive gain. Control Eng. Pract. 2020, 101, 104456. [Google Scholar] [CrossRef]
- Torres-Zúñiga, I.; Lopez-Caamal, F.; Hernandez-Escoto, H.; Alcaraz-Gonzalez, V. Extremum seeking control and gradient estimation based on the Super-Twisting algorithm. J. Process Control 2021, 105, 223–235. [Google Scholar] [CrossRef]
- Zhang, C.; Ordóñez, R. Extremum-Seeking Control and Applications: A Numerical Optimization-Based Approach; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Scheinker, A.; Krstić, M. Model-Free Stabilization by Extremum Seeking; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Tan, Y.; Moase, W.H.; Manzie, C.; Nešić, D.; Mareels, I.M. Extremum seeking from 1922 to 2010. In Proceedings of the 29th Chinese Control Conference, Beijing, China, 29–31 July 2010; pp. 14–26. [Google Scholar]
- Kim, D.; Cha, K.; Sung, I.; Bryan, J. Design of surface micro-structures for friction control in micro-systems applications. CIRP Ann. 2002, 51, 495–498. [Google Scholar] [CrossRef]
- Lumbantobing, A.; Komvopoulos, K. Static friction in polysilicon surface micromachines. J. Microelectromech. Syst. 2005, 14, 651–663. [Google Scholar] [CrossRef]
- Xiang, H.; Komvopoulos, K. Effect of fluorocarbon self-assembled monolayer films on sidewall adhesion and friction of surface micromachines with impacting and sliding contact interfaces. J. Appl. Phys. 2013, 113, 224505. [Google Scholar] [CrossRef]
- Shroff, S.S.; de Boer, M.P. Full Assessment of Micromachine Friction Within the Rate–State Framework: Experiments. Tribol. Lett. 2016, 63, 1–15. [Google Scholar] [CrossRef]
- Shroff, S.S.; de Boer, M.P. Direct observation of the velocity contribution to friction in monolayer-coated micromachines. Extrem. Mech. Lett. 2016, 8, 184–190. [Google Scholar] [CrossRef]
- Lu, Y.; Lu, J.; Tan, C.; Tian, M.; Dong, G. Adaptive Non-Singular Terminal Sliding Mode Control Method for Electromagnetic Linear Actuator. Micromachines 2022, 13, 1294. [Google Scholar] [CrossRef]
- Dumanli, A.; Sencer, B. Pre-compensation of servo tracking errors through data-based reference trajectory modification. CIRP Ann. 2019, 68, 397–400. [Google Scholar] [CrossRef]
- Khalil, H. Nonlinear Systems; Pearson Education, Prentice Hall: Englewood Cliffs, NJ, USA, 2002. [Google Scholar]
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991; Volume 199. [Google Scholar]
- Ho, H.; Wong, Y.K.; Rad, A.B. Adaptive fuzzy sliding mode control with chattering elimination for nonlinear SISO systems. Simul. Model. Pract. Theory 2009, 17, 1199–1210. [Google Scholar] [CrossRef]
- Bartolini, G.; Punta, E. Chattering elimination with second-order sliding modes robust to coulomb friction. J. Dyn. Syst. Meas. Control 2000, 122, 679–686. [Google Scholar] [CrossRef]
- Al-Hadithi, B.M.; Barragan, A.J.; Andújar, J.M.; Jimenez, A. Variable Structure Control with chattering elimination and guaranteed stability for a generalized TS model. Appl. Soft Comput. 2013, 13, 4802–4812. [Google Scholar] [CrossRef]
- Levant, A. Homogeneity approach to high-order sliding mode design. Automatica 2005, 41, 823–830. [Google Scholar] [CrossRef]
- Orlov, Y.; Aguilar, L.T.; Acho, L.; Ortiz, A. Asymptotic harmonic generator and its application to finite time orbital stabilization of a friction pendulum with experimental verification. Int. J. Control 2008, 81, 227–234. [Google Scholar] [CrossRef]
- Shtessel, Y.; Kaveh, P.; Ashrafi, A. Harmonic oscillator utilizing double-fold integral, traditional and second-order sliding mode control. J. Frankl. Inst. 2009, 346, 872–888. [Google Scholar] [CrossRef]
- Olsson, H.; Åström, K.J.; De Wit, C.C.; Gäfvert, M.; Lischinsky, P. Friction models and friction compensation. Eur. J. Control 1998, 4, 176–195. [Google Scholar] [CrossRef]
- Guerra, R.; Acho, L.; Aguilar, L. Adaptive friction compensation for mechanisms: A new perspective. Int. J. Robot. Autom. 2007, 22, 155–159. [Google Scholar] [CrossRef]
- Guerra, R.; Acho, L. Adaptive friction compensation for tracking control of mechanisms. Asian J. Control 2007, 9, 422–425. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Challenge | Strategy | Evidence |
|---|---|---|
| Incorporate a dynamic optimizer in a closed-loop system | Search for a structure where the control signal is integrated to reduce the vibration that the optimizer and the plant could produce | Through numerical experiments |
| Closed-loop stability test | Invoke the theory of stability in the sense of Lyapunov | Verifying that the conditions of Lyapunov’s theory are met |
| To test control performance in a frictional micromachine using an experimentally validated system model | Use of numerical experiments | From numerical data, observe acceptable performance |
| Control Parameter | Steady-State Error | Transient Time Duration |
|---|---|---|
| k | – | ↓ |
| ↑ | ↓ | |
| ↑ | – |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Acho, L. A Control Method Based on a Simple Dynamic Optimizer: An Application to Micromachines with Friction. Micromachines 2023, 14, 387. https://doi.org/10.3390/mi14020387
Acho L. A Control Method Based on a Simple Dynamic Optimizer: An Application to Micromachines with Friction. Micromachines. 2023; 14(2):387. https://doi.org/10.3390/mi14020387
Chicago/Turabian StyleAcho, Leonardo. 2023. "A Control Method Based on a Simple Dynamic Optimizer: An Application to Micromachines with Friction" Micromachines 14, no. 2: 387. https://doi.org/10.3390/mi14020387
APA StyleAcho, L. (2023). A Control Method Based on a Simple Dynamic Optimizer: An Application to Micromachines with Friction. Micromachines, 14(2), 387. https://doi.org/10.3390/mi14020387