
A High Sensitivity AlN-Based MEMS Hydrophone for Pipeline Leak Monitoring
Abstract
:1. Introduction
2. The Design of the MEMS Hydrophone
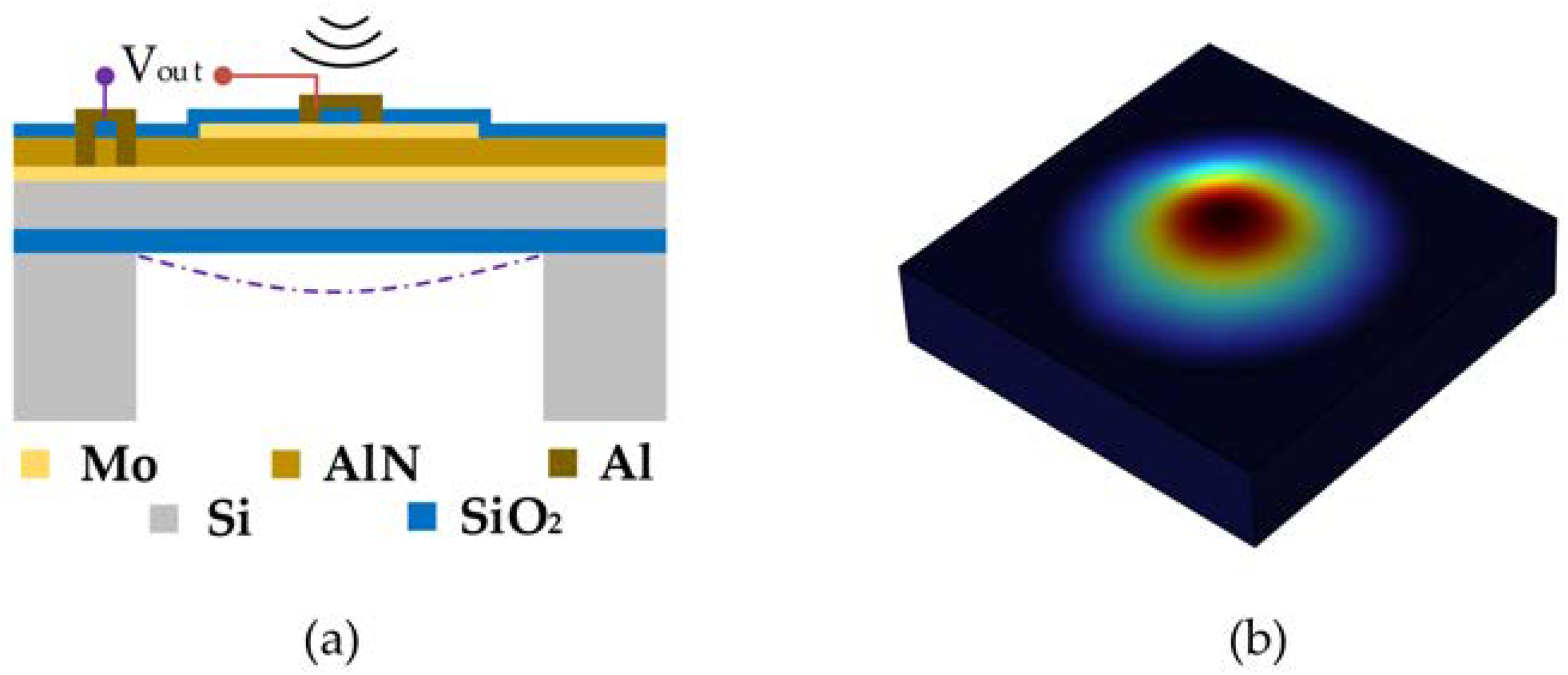
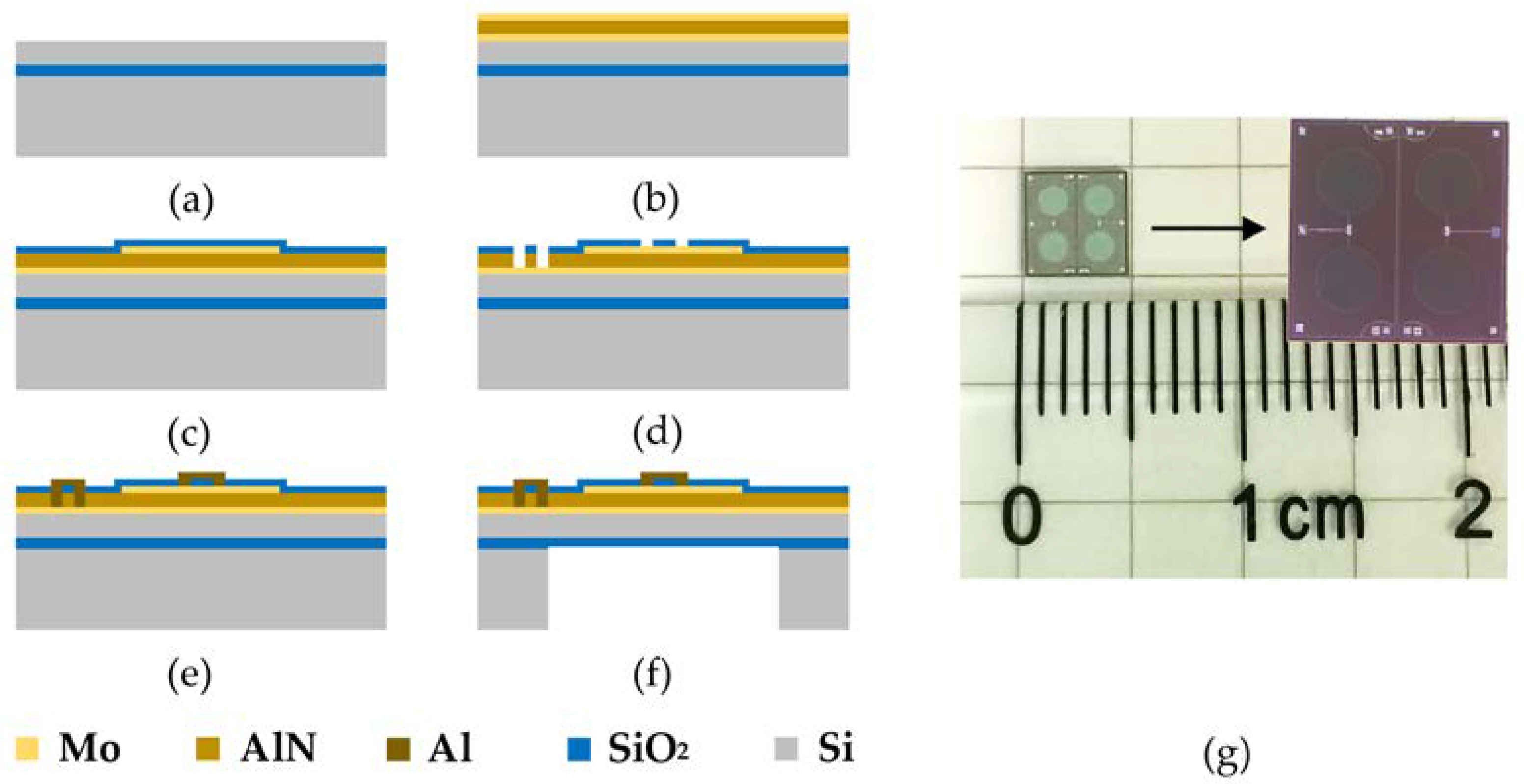
2.1. The Working Principle and Fabrication of PMUT
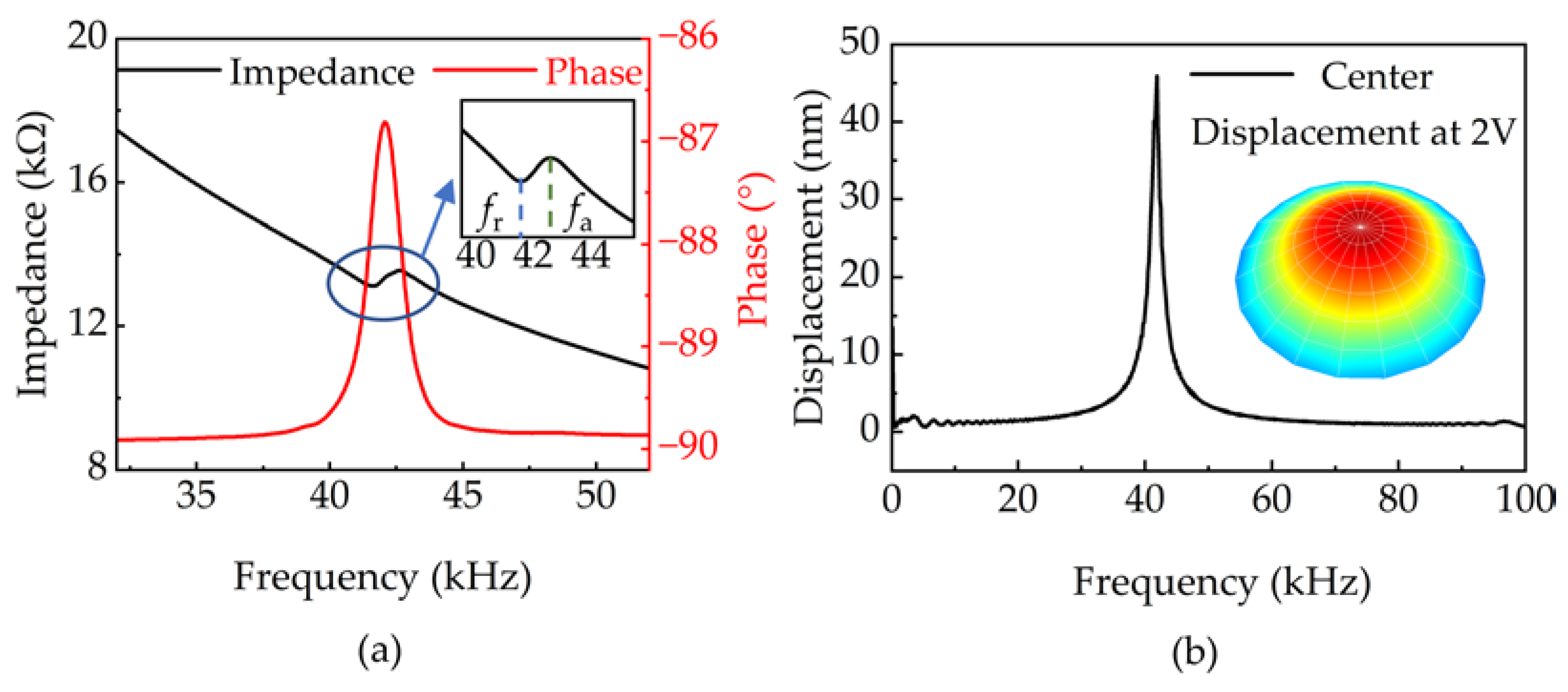
2.2. Characterizations of PMUT
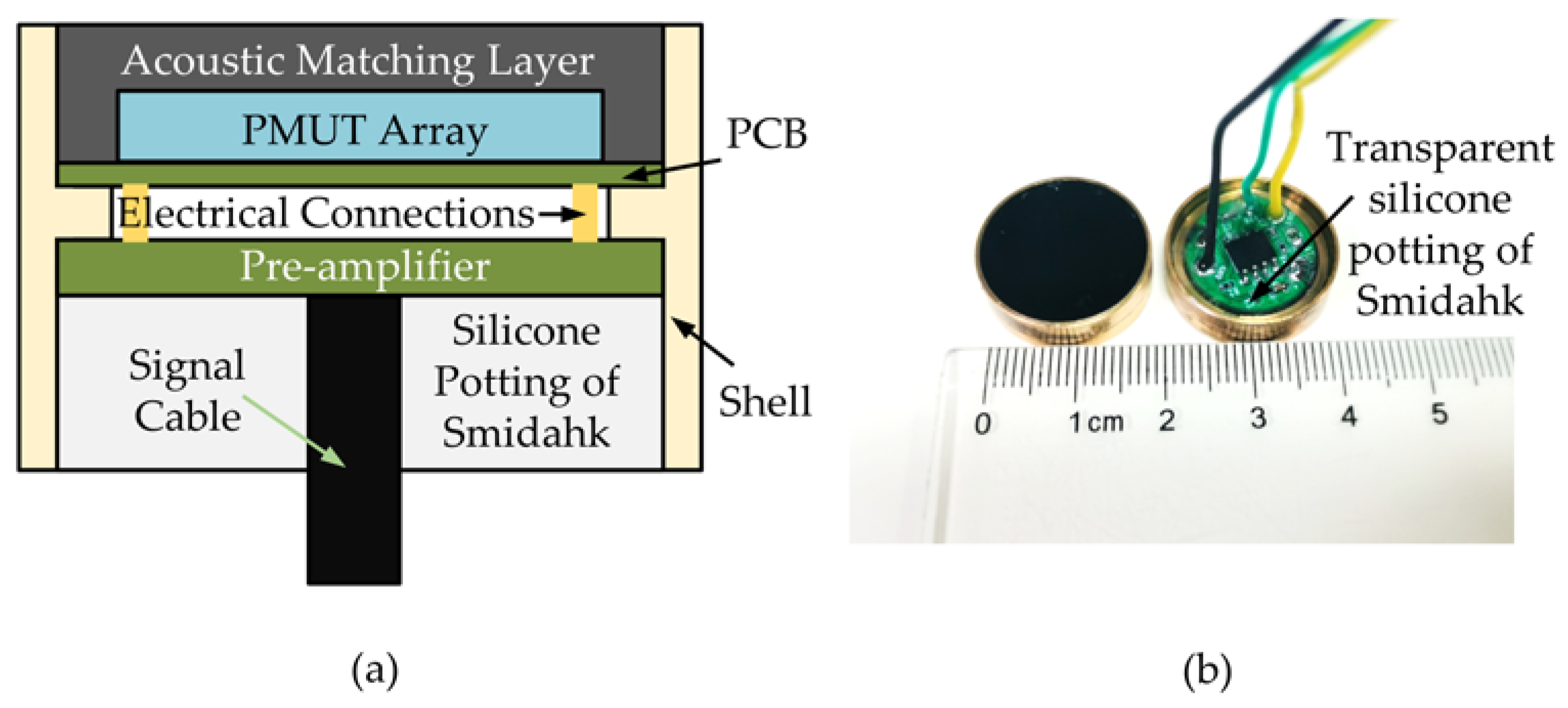
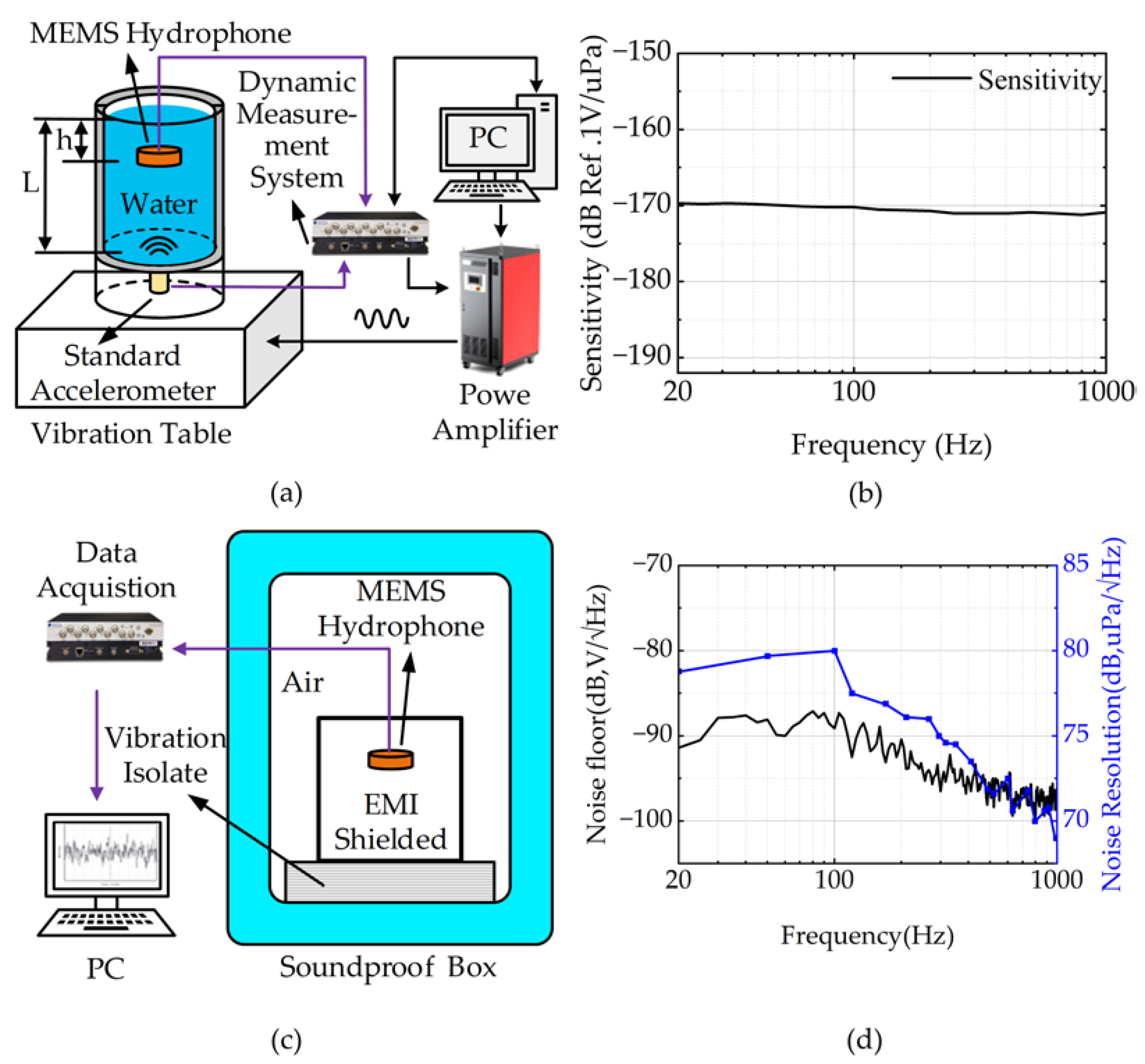
2.3. Package and Characterizations of MEMS Hydrophone
3. Results and Discussion
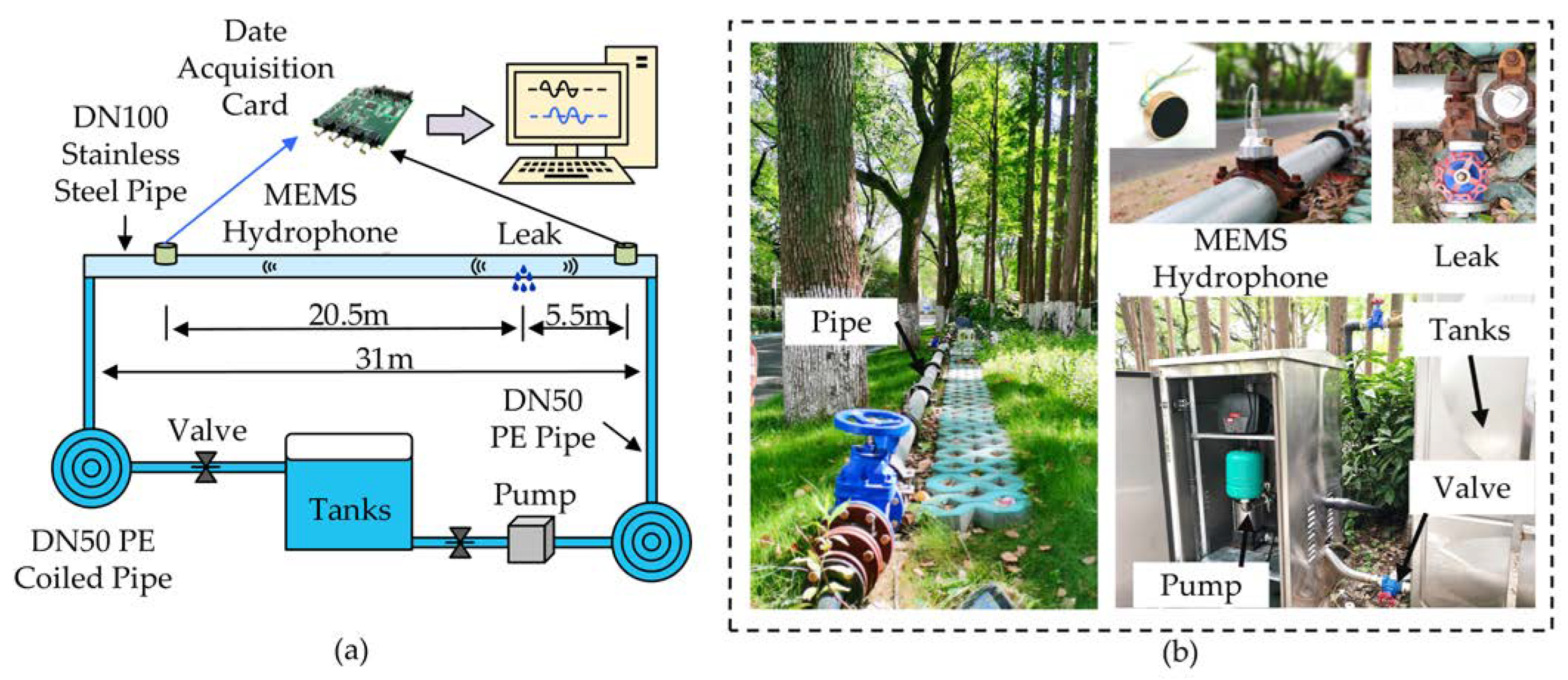
3.1. Experimental Setup
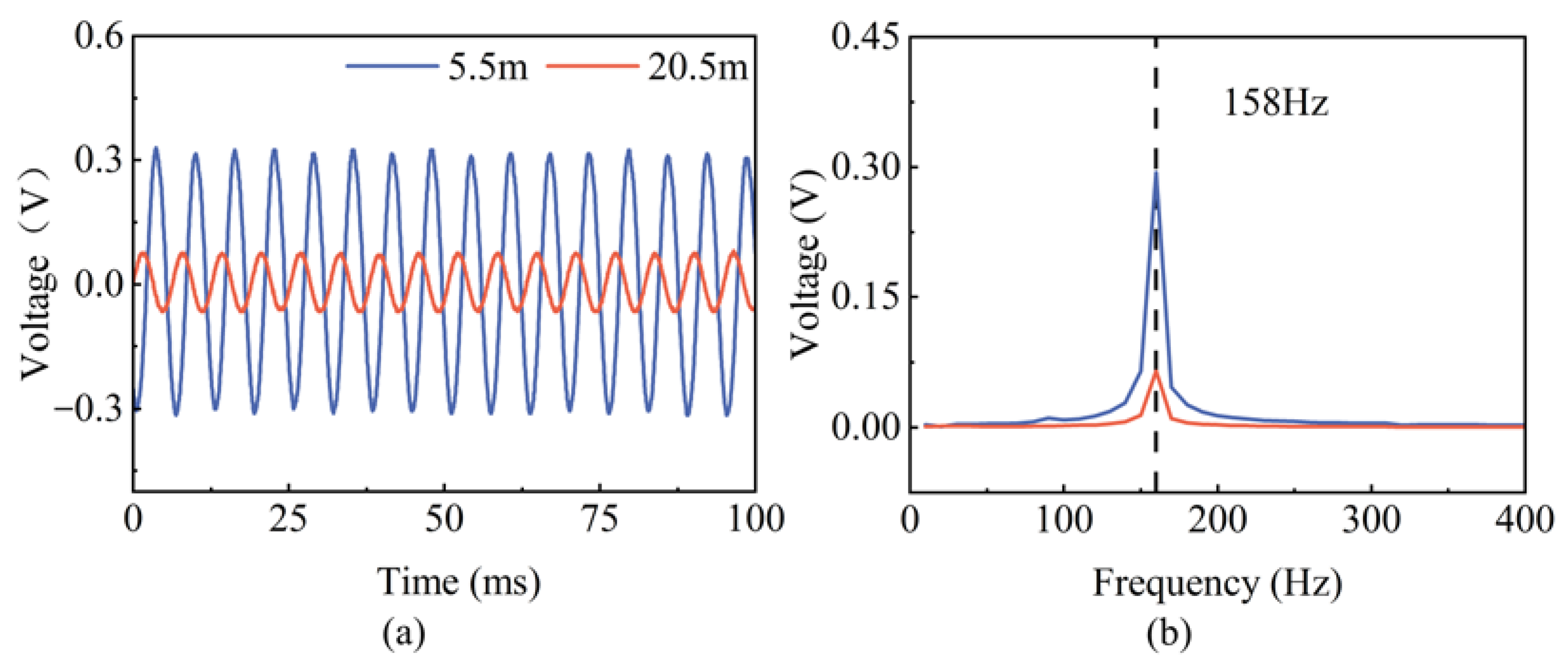
3.2. The Characteristics of Pipeline Acoustics
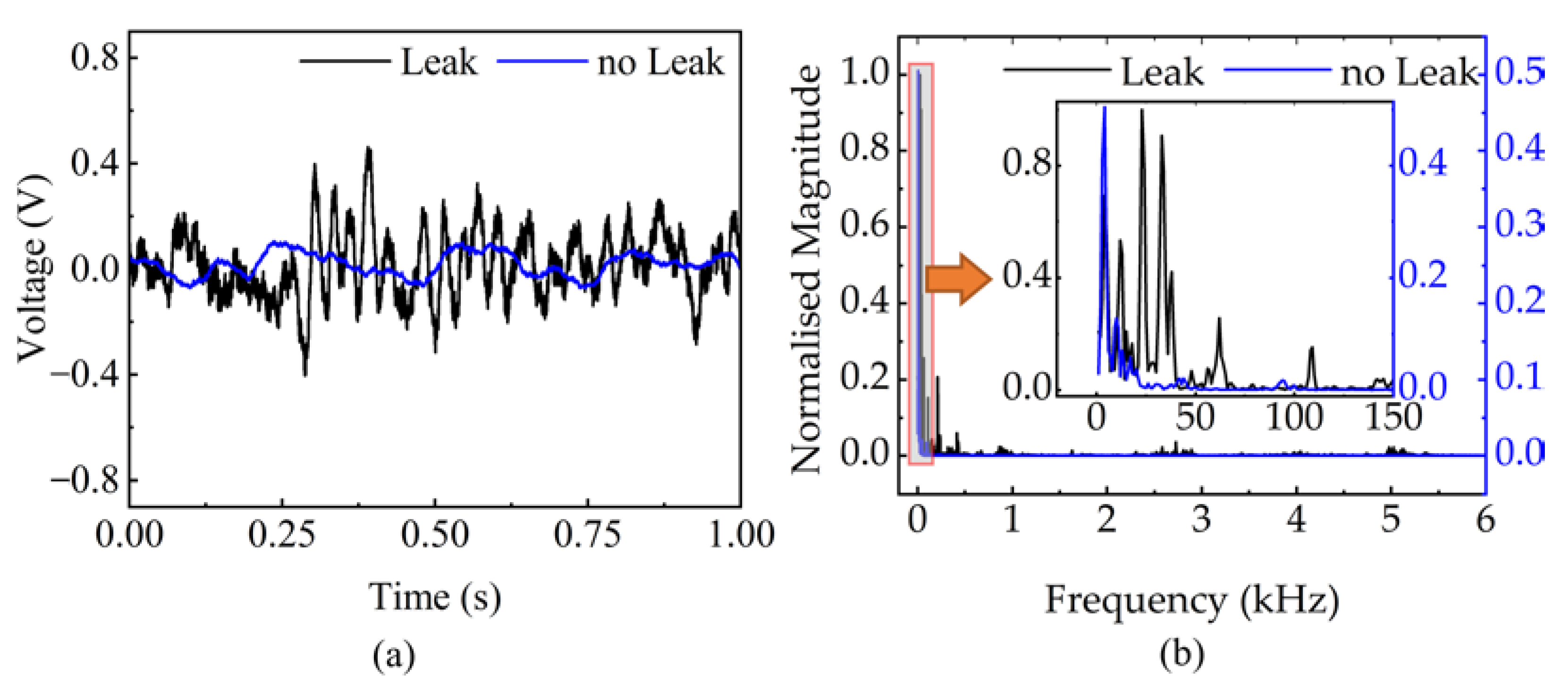
3.3. The Characteristics of Leakage Sound
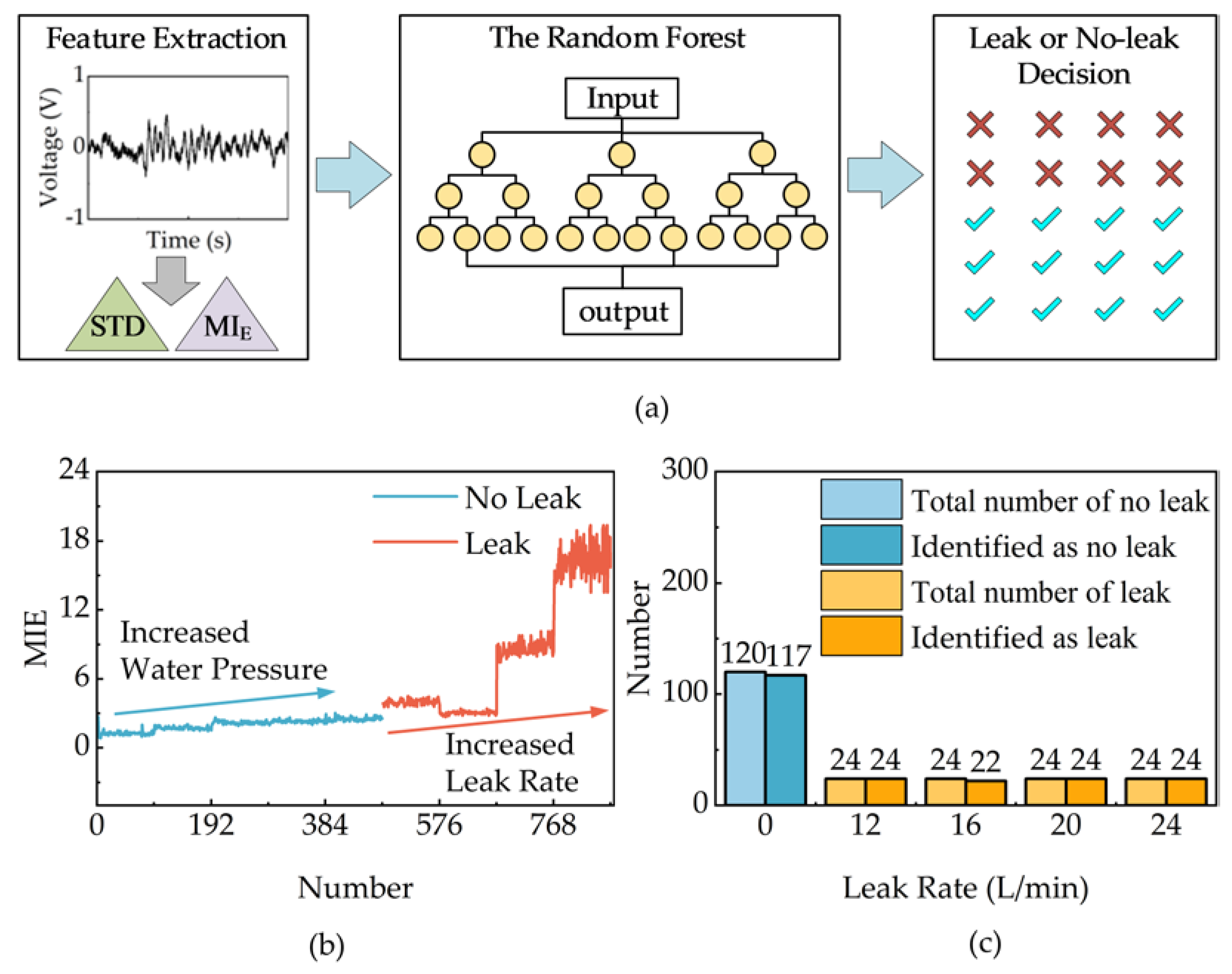
3.4. Leak Detection
- STD is calculated every 5 s. The non-leak signals return 600 STD values, and the leak signals return 480 STD values.
- The monitoring threshold MI0 is established. MI0 is the average of the ten smallest STDs in the non-leak and leak cases. It is obtained by Equation (6) [21],
- Calculating the MIE. The non-leak signals return 600 MIE values, and the leak signals return 480 MIE values. The MIE is obtained through Equation (7) [21],
- Training the Random Forest model. The STD and MIE are used as features for supervised training. Before the application of the Random Forest, the data are separated randomly according to an 8:2 ratio, of which 80% are used to train the Random Forest model and 20% are used to validate the model.
- Validating the model. The accuracy is obtained through Equation (8) [21],where true positive (TP) means a positive event identified correctly, true negative (TN) means a negative event identified correctly, false negative (FN) means a positive event incorrectly identified as negative and false positive (FP) means a negative event incorrectly identified as positive.
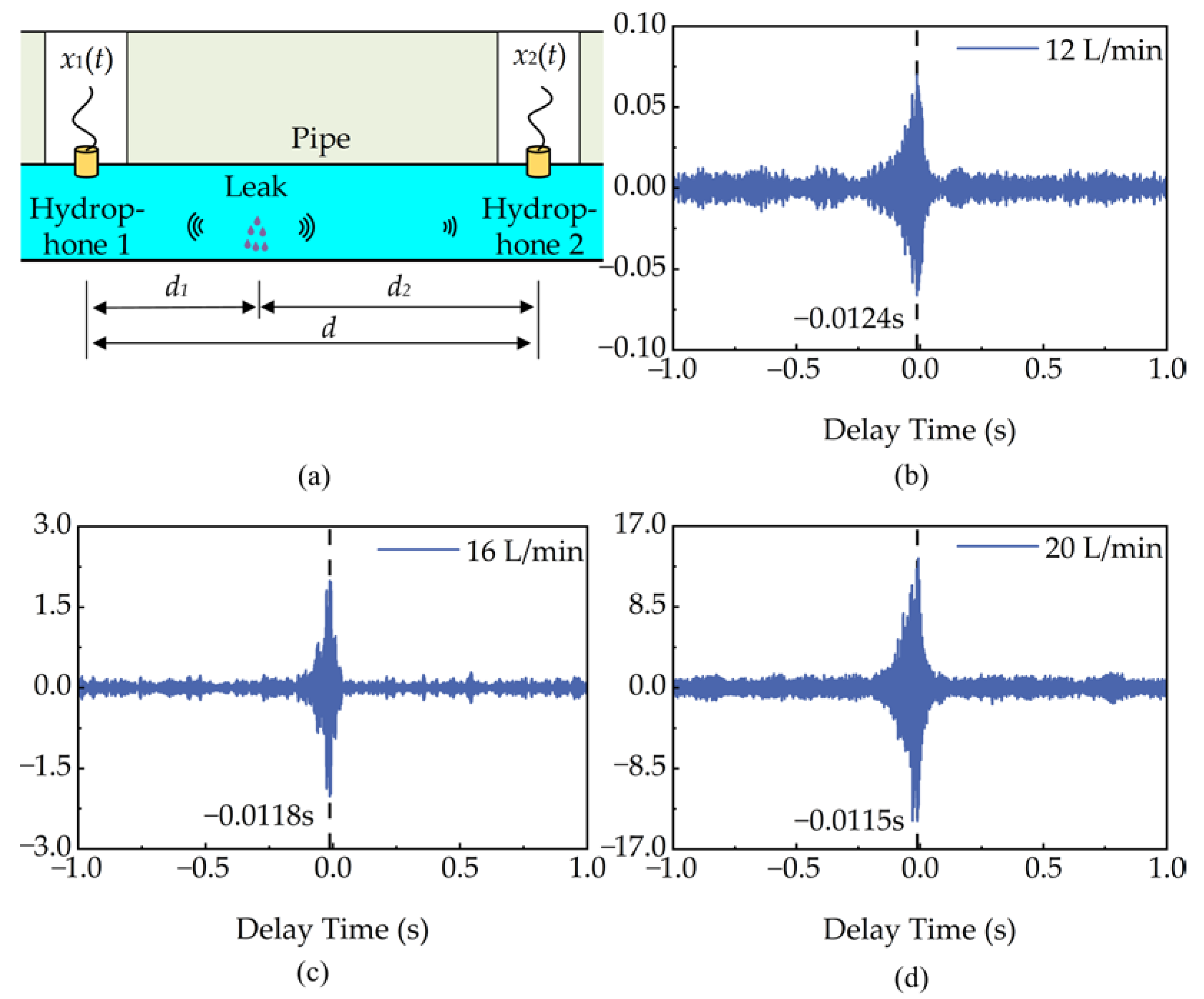
3.5. Leak Localization
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chan, T.K.; Chin, C.S.; Zhong, X. Review of Current Technologies and Proposed Intelligent Methodologies for Water Distributed Network Leakage Detection. IEEE Access 2018, 6, 78846–78867. [Google Scholar] [CrossRef]
- Liemberger, R.; Wyatt, A. Quantifying the Global Non-Revenue Water Problem. Water Supply 2019, 19, 831–837. [Google Scholar] [CrossRef]
- Li, R.; Huang, H.; Xin, K.; Tao, T. A Review of Methods for Burst/Leakage Detection and Location in Water Distribution Systems. Water Supply 2015, 15, 429–441. [Google Scholar] [CrossRef]
- Chatzigeorgiou, D.M.; Khalifa, A.E.; Youcef-Toumi, K.; Ben-Mansour, R. An In-Pipe Leak Detection Sensor: Sensing Capabilities and Evaluation. In Proceedings of the 2011 ASME/IEEE International Conference on Mechatronic and Embedded Systems and Applications, Washington, DC, USA, 28–31 August 2011; Parts A and B. ASMEDC: Washington, DC, USA; Volume 3, pp. 481–489. [Google Scholar]
- Cody, R.A.; Tolson, B.A.; Orchard, J. Detecting Leaks in Water Distribution Pipes Using a Deep Autoencoder and Hydroacoustic Spectrograms. J. Comput. Civ. Eng. 2020, 34, 04020001. [Google Scholar] [CrossRef]
- Puust, R.; Kapelan, Z.; Savic, D.A.; Koppel, T. A Review of Methods for Leakage Management in Pipe Networks. Urban Water J. 2010, 7, 25–45. [Google Scholar] [CrossRef]
- Yu, Y.; Safari, A.; Niu, X.; Drinkwater, B.; Horoshenkov, K.V. Acoustic and Ultrasonic Techniques for Defect Detection and Condition Monitoring in Water and Sewerage Pipes: A Review. Appl. Acoust. 2021, 183, 108282. [Google Scholar] [CrossRef]
- Sun, P.; Gao, Y.; Jin, B.; Brennan, M.J. Use of PVDF Wire Sensors for Leakage Localization in a Fluid-Filled Pipe. Sensors 2020, 20, 692. [Google Scholar] [CrossRef] [Green Version]
- Bakhtawar, B.; Zayed, T. Review of Water Leak Detection and Localization Methods through Hydrophone Technology. J. Pipeline Syst. Eng. Pract. 2021, 12, 03121002. [Google Scholar] [CrossRef]
- Gao, Y.; Brennan, M.J.; Joseph, P.F.; Muggleton, J.M.; Hunaidi, O. On the Selection of Acoustic/Vibration Sensors for Leak Detection in Plastic Water Pipes. J. Sound Vib. 2005, 283, 927–941. [Google Scholar] [CrossRef]
- Hunaidi, O.; Chu, W.; Wang, A.; Guan, W. Detecting Leaks in Plastic Pipes. J. Am. Water Work. Assoc. 2000, 92, 82–94. [Google Scholar] [CrossRef] [Green Version]
- Hunaidi, O.; Chu, W.T. Acoustical Characteristics of Leak Signals in Plastic Water Distribution Pipes. Appl. Acoust. 1999, 58, 235–254. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Brennan, M.J.; Joseph, P.F. Detecting Leaks in Buried Plastic Pipes Using Correlation Techniques: Part 1. A Model of the Correlation Function of Leak Noise. In Proceedings of the 18th International Congress on Acoustics, Kyoto, Japan, 4–9 April 2004. [Google Scholar]
- Almeida, F.; Brennan, M.; Joseph, P.; Whitfield, S.; Dray, S.; Paschoalini, A. On the Acoustic Filtering of the Pipe and Sensor in a Buried Plastic Water Pipe and Its Effect on Leak Detection: An Experimental Investigation. Sensors 2014, 14, 5595–5610. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Brennan, M.J.; Liu, Y.; Almeida, F.C.L.; Joseph, P.F. Improving the Shape of the Cross-Correlation Function for Leak Detection in a Plastic Water Distribution Pipe Using Acoustic Signals. Appl. Acoust. 2017, 127, 24–33. [Google Scholar] [CrossRef] [Green Version]
- Kafle, M.D.; Narasimhan, S. Active Acoustic Leak Detection in a Pressurized PVC Pipe. Urban Water J. 2020, 17, 315–324. [Google Scholar] [CrossRef]
- Martini, A.; Rivola, A.; Troncossi, M. Autocorrelation Analysis of Vibro-Acoustic Signals Measured in a Test Field for Water Leak Detection. Appl. Sci. 2018, 8, 2450. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Liu, Y.; Ma, Y.; Cheng, X.; Yang, J. Application of the Differentiation Process into the Correlation-Based Leak Detection in Urban Pipeline Networks. Mech. Syst. Signal Process. 2018, 112, 251–264. [Google Scholar] [CrossRef]
- Tariq, S.; Hu, Z.; Zayed, T. Micro-Electromechanical Systems-Based Technologies for Leak Detection and Localization in Water Supply Networks: A Bibliometric and Systematic Review. J. Clean. Prod. 2021, 289, 125751. [Google Scholar] [CrossRef]
- Mohd Ismail, M.I.; Dziyauddin, R.A.; Ahmad Salleh, N.A.; Muhammad-Sukki, F.; Aini Bani, N.; Mohd Izhar, M.A.; Latiff, L.A. A Review of Vibration Detection Methods Using Accelerometer Sensors for Water Pipeline Leakage. IEEE Access 2019, 7, 51965–51981. [Google Scholar] [CrossRef]
- Tariq, S.; Bakhtawar, B.; Zayed, T. Data-Driven Application of MEMS-Based Accelerometers for Leak Detection in Water Distribution Networks. Sci. Total Environ. 2022, 809, 151110. [Google Scholar] [CrossRef]
- Xu, J.; Chai, K.T.-C.; Wu, G.; Han, B.; Wai, E.L.-C.; Li, W.; Yeo, J.; Nijhof, E.; Gu, Y. Low-Cost, Tiny-Sized MEMS Hydrophone Sensor for Water Pipeline Leak Detection. IEEE Trans. Ind. Electron. 2019, 66, 6374–6382. [Google Scholar] [CrossRef]
- Phua, W.K.; Rabeek, S.M.; Han, B.; Njihof, E.; Huang, T.T.; Chai, K.T.C.; Yeo, J.H.H.; Lim, S.T. AIN-Based MEMS (Micro-Electro-Mechanical System) Hydrophone Sensors for IoT Water Leakage Detection System. Water 2020, 12, 2966. [Google Scholar] [CrossRef]
- Lu, Y.; Tang, H.-Y.; Fung, S.; Boser, B.E.; Horsley, D.A. Pulse-Echo Ultrasound Imaging Using an AlN Piezoelectric Micromachined Ultrasonic Transducer Array with Transmit Beam-Forming. J. Microelectromech. Syst. 2016, 25, 179–187. [Google Scholar] [CrossRef]
- Hake, A.E.; Zhao, C.; Ping, L.; Grosh, K. Ultraminiature AlN Diaphragm Acoustic Transducer. Appl. Phys. Lett. 2020, 117, 143504. [Google Scholar] [CrossRef]
- Roy, K.; Kalyan, K.; Ashok, A.; Shastri, V.; Jeyaseelan, A.A.; Mandal, A.; Pratap, R. A PMUT Integrated Microfluidic System for Fluid Density Sensing. J. Microelectromech. Syst. 2021, 30, 642–649. [Google Scholar] [CrossRef]
- Li, Z.; Gao, Y.; Chen, M.; Lou, L.; Ren, H. An AlN Piezoelectric Micromachined Ultrasonic Transducer-Based Liquid Density Sensor. IEEE Trans. Electron Devices 2023, 70, 261–268. [Google Scholar] [CrossRef]
- Roy, K.; Gupta, H.; Shastri, V.; Dangi, A.; Jeyaseelan, A.; Dutta, S.; Pratap, R. Fluid Density Sensing Using Piezoelectric Micromachined Ultrasound Transducers. IEEE Sens. J. 2020, 20, 6802–6809. [Google Scholar] [CrossRef]
- Le, X.; Shi, Q.; Vachon, P.; Ng, E.J.; Lee, C. Piezoelectric MEMS—Evolution from Sensing Technology to Diversified Applications in the 5G/Internet of Things (IoT) Era. J. Micromech. Microeng. 2022, 32, 014005. [Google Scholar] [CrossRef]
- Ledesma, E.; Zamora, I.; Yanez, J.; Uranga, A.; Barniol, N. Single-Cell System Using Monolithic PMUTs-on-CMOS to Monitor Fluid Hydrodynamic Properties. Microsyst. Nanoeng. 2022, 8, 76. [Google Scholar] [CrossRef]
- Shi, Q.; Sun, Z.; Le, X.; Xie, J.; Lee, C. Soft Robotic Perception System with Ultrasonic Auto-Positioning and Multimodal Sensory Intelligence. ACS Nano 2023, 17, 4985–4998. [Google Scholar] [CrossRef] [PubMed]
- Dausch, D.E.; Gilchrist, K.H.; Carlson, J.B.; Hall, S.D.; Castellucci, J.B.; von Ramm, O.T. In Vivo Real-Time 3-D Intracardiac Echo Using PMUT Arrays. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2014, 61, 1754–1764. [Google Scholar] [CrossRef]
- Lu, Y.; Tang, H.; Fung, S.; Wang, Q.; Tsai, J.M.; Daneman, M.; Boser, B.E.; Horsley, D.A. Ultrasonic Fingerprint Sensor Using a Piezoelectric Micromachined Ultrasonic Transducer Array Integrated with Complementary Metal Oxide Semiconductor Electronics. Appl. Phys. Lett. 2015, 106, 263503. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.; Zhang, X.; Fernando, S.N.; Chai, K.T.; Gu, Y. AlN-on-SOI Platform-Based Micro-Machined Hydrophone. Appl. Phys. Lett. 2016, 109, 032902. [Google Scholar] [CrossRef]
- Jia, L.; Shi, L.; Liu, C.; Yao, Y.; Sun, C.; Wu, G. Design and Characterization of an Aluminum Nitride-Based MEMS Hydrophone with Biologically Honeycomb Architecture. IEEE Trans. Electron Devices 2021, 68, 4656–4663. [Google Scholar] [CrossRef]
- Fournier, S.; Chappel, E. Modeling of a Piezoelectric MEMS Micropump Dedicated to Insulin Delivery and Experimental Validation Using Integrated Pressure Sensors: Application to Partial Occlusion Management. J. Sens. 2017, 2017, 3719853. [Google Scholar] [CrossRef]
- Jiang, X.; Lu, Y.; Tang, H.-Y.; Tsai, J.M.; Ng, E.J.; Daneman, M.J.; Boser, B.E.; Horsley, D.A. Monolithic Ultrasound Fingerprint Sensor. Microsyst. Nanoeng. 2017, 3, 17059. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.; Liu, W.; Tong, Z.; Zhang, S.; Gu, Y.; Wu, G.; Tovstopyat, A.; Sun, C.; Lou, L. A Novel Transfer Function Based Ring-Down Suppression System for PMUTs. Sensors 2021, 21, 6414. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Liu, W.; Tong, Z.; Cai, Y.; Sun, C.; Lou, L. Tuning Characteristics of AlN-Based Piezoelectric Micromachined Ultrasonic Transducers Using DC Bias Voltage. IEEE Trans. Electron Devices 2022, 69, 729–735. [Google Scholar] [CrossRef]
- Yang, D.; Yang, L.; Chen, X.; Qu, M.; Zhu, K.; Ding, H.; Li, D.; Bai, Y.; Ling, J.; Xu, J.; et al. A Piezoelectric AlN MEMS Hydrophone with High Sensitivity and Low Noise Density. Sens. Actuators A Phys. 2021, 318, 112493. [Google Scholar] [CrossRef]
- Gao, Y.; Brennan, M.J.; Joseph, P.F.; Muggleton, J.M.; Hunaidi, O. A Model of the Correlation Function of Leak Noise in Buried Plastic Pipes. J. Sound Vib. 2004, 277, 133–148. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Top Mo | AlN | Bottom Mo | Si | Cavity |
|---|---|---|---|---|---|
| Radius (µm) | 690 | - | - | - | 950 |
| Thickness (µm) | 0.2 | 1 | 0.2 | 5 | 400 |
| Mean Value | STD | Maximum Value | Minimum Value | |
|---|---|---|---|---|
| Leakage | 0.01608 | 0.12466 | 0.46154 | −0.40293 |
| Non-leakage | 0.01833 | 0.04378 | 0.10501 | −0.07082 |
| Leak Rate | Delay Time | Distance | Relative Error |
|---|---|---|---|
| 12 L/min | −0.0124 s | 4.904 m | 10.84% |
| 16 L/min | −0.0118 s | 5.303 m | 3.58% |
| 20 L/min | −0.0115 s | 5.502 m | 0.04% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhi, B.; Wu, Z.; Chen, C.; Chen, M.; Ding, X.; Lou, L. A High Sensitivity AlN-Based MEMS Hydrophone for Pipeline Leak Monitoring. Micromachines 2023, 14, 654. https://doi.org/10.3390/mi14030654
Zhi B, Wu Z, Chen C, Chen M, Ding X, Lou L. A High Sensitivity AlN-Based MEMS Hydrophone for Pipeline Leak Monitoring. Micromachines. 2023; 14(3):654. https://doi.org/10.3390/mi14030654
Chicago/Turabian StyleZhi, Baoyu, Zhipeng Wu, Caihui Chen, Minkan Chen, Xiaoxia Ding, and Liang Lou. 2023. "A High Sensitivity AlN-Based MEMS Hydrophone for Pipeline Leak Monitoring" Micromachines 14, no. 3: 654. https://doi.org/10.3390/mi14030654
APA StyleZhi, B., Wu, Z., Chen, C., Chen, M., Ding, X., & Lou, L. (2023). A High Sensitivity AlN-Based MEMS Hydrophone for Pipeline Leak Monitoring. Micromachines, 14(3), 654. https://doi.org/10.3390/mi14030654