
Heterogeneous Multi-Material Flexible Piezoresistive Sensor with High Sensitivity and Wide Measurement Range



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Experimental
2.1. Materials
2.2. Preparation of HMFPS
2.3. Characterizations and Measurement
3. Results and Discussion
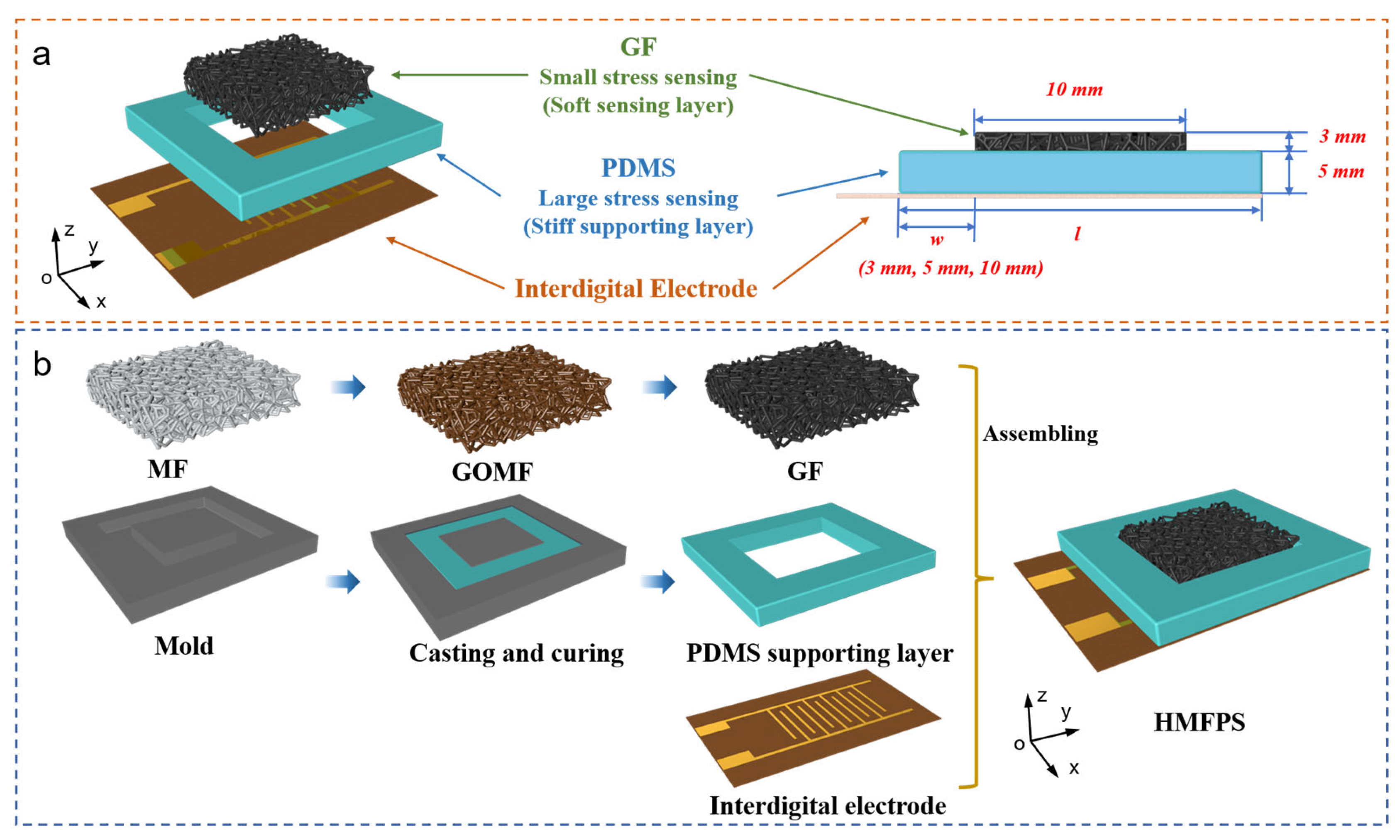
3.1. Structure and Morphology
3.2. Sensing Mechanism and Piezoresistivity of the HMFPS
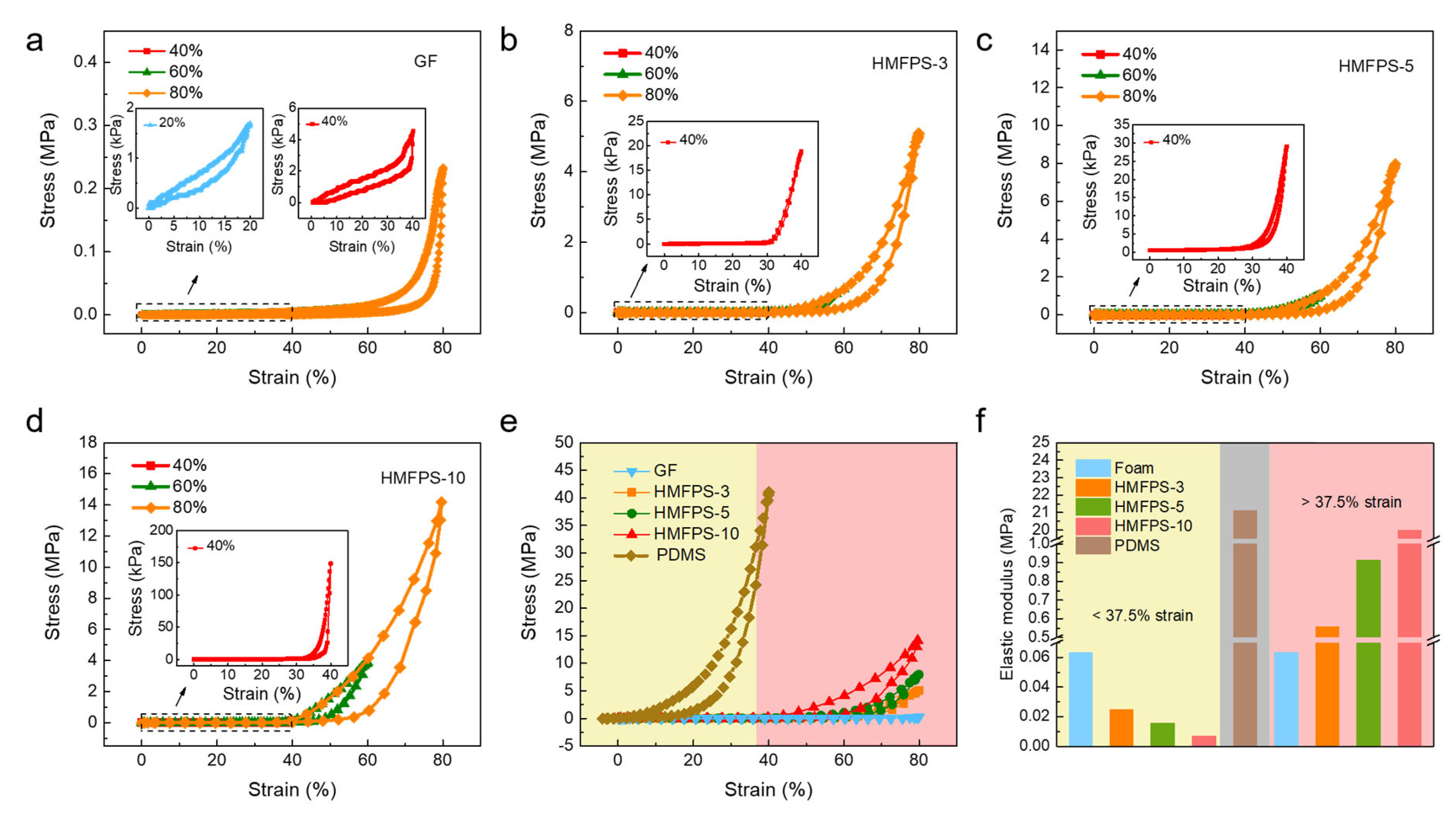
3.3. Mechanical Properties of the HMFPS
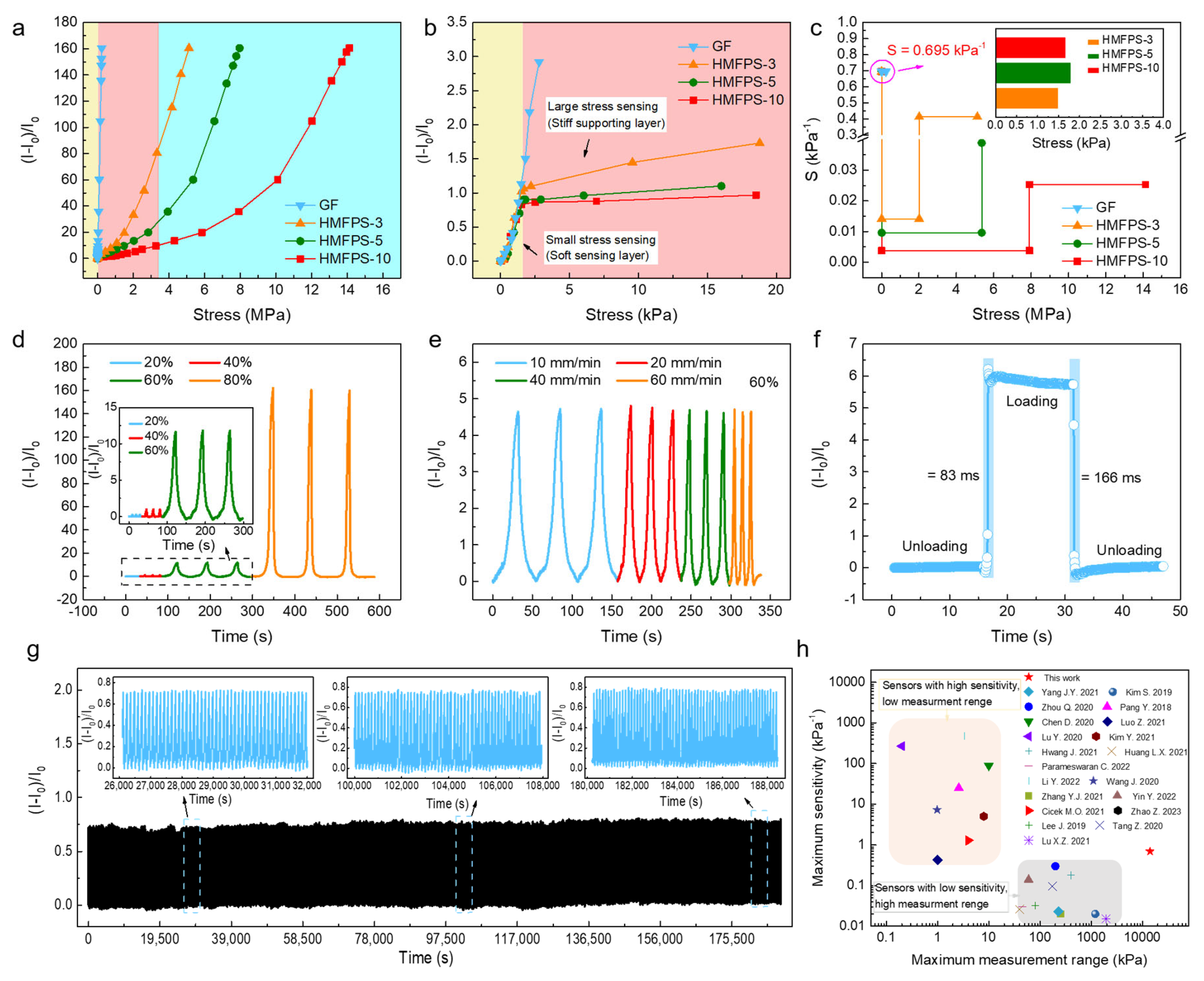
3.4. Piezoresistivity of the HMFPS
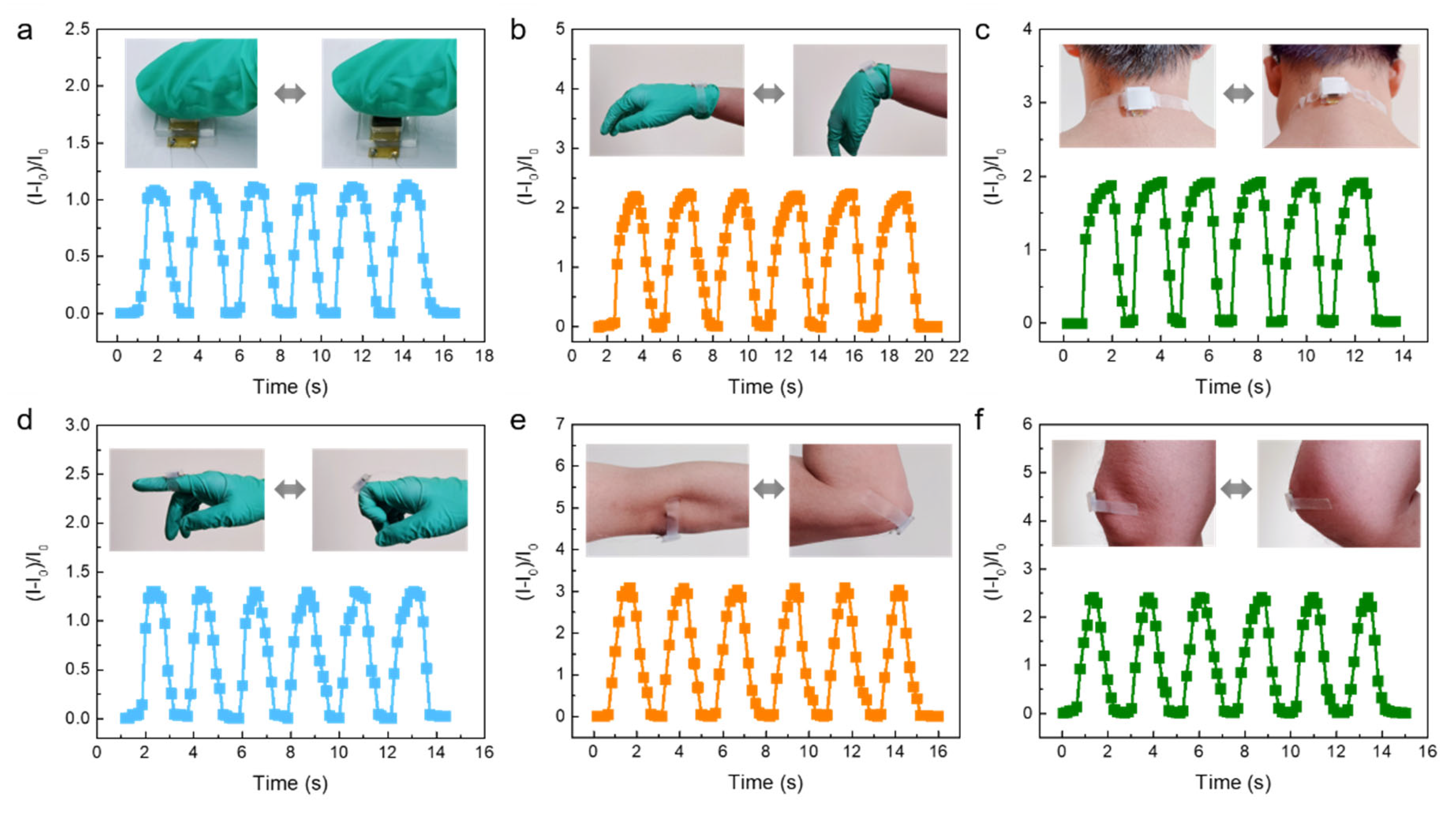
3.5. Applications of the HMFPS
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhu, M.L.; He, T.Y.Y.; Lee, C.K. Technologies toward next generation human machine interfaces: From machine learning enhanced tactile sensing to neuromorphic sensory systems. Appl. Phys. Rev. 2020, 7, 031305. [Google Scholar] [CrossRef]
- Yang, J.C.; Mun, J.; Kwon, S.Y.; Park, S.; Bao, Z.; Park, S. Electronic Skin: Recent Progress and Future Prospects for Skin-Attachable Devices for Health Monitoring, Robotics, and Prosthetics. Adv. Mater. 2019, 31, e1904765. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ge, G.; Wang, Q.; Zhang, Y.Z.; Alshareef, H.N.; Dong, X. 3D Printing of Hydrogels for Stretchable Ionotronic Devices. Adv. Funct. Mater. 2021, 31, 2107437. [Google Scholar] [CrossRef]
- Ge, G.; Mandal, K.; Haghniaz, R.; Li, M.; Xiao, X.; Carlson, L.; Jucaud, V.; Dokmeci, M.R.; Ho, G.W.; Khademhosseini, A. Deep Eutectic Solvents-Based Ionogels with Ultrafast Gelation and High Adhesion in Harsh Environments. Adv. Funct. Mater. 2023, 33, 2207388. [Google Scholar] [CrossRef]
- Xu, J.; Wang, Z.M.; Wang, X.X.; Wu, Y.L.; Xing, R.Z.; Yu, T.T.; Li, Y.; Ao, J.P.; Tao, Y.B.; Bai, B.W.; et al. Breathable Encapsulated Liquid Metal Foam-Based Soft Stress Sensor. Adv. Mater. Technol. 2023, 2201193. [Google Scholar] [CrossRef]
- White, E.L.; Yuen, M.C.; Case, J.C.; Kramer, R.K. Low-Cost, Facile, and Scalable Manufacturing of Capacitive Sensors for Soft Systems. Adv. Mater. Technol. 2017, 2, 1700072. [Google Scholar] [CrossRef]
- Shintake, J.; Piskarev, E.; Jeong, S.H.; Floreano, D. Ultrastretchable Strain Sensors Using Carbon Black-Filled Elastomer Composites and Comparison of Capacitive Versus Resistive Sensors. Adv. Mater. Technol. 2018, 3, 1700284. [Google Scholar] [CrossRef] [Green Version]
- You, I.; Mackanic, D.G.; Matsuhisa, N.; Kang, J.; Kwon, J.; Beker, L.; Mun, J.; Suh, W.; Kim, T.Y.; Tok, J.B.; et al. Artificial multimodal receptors based on ion relaxation dynamics. Science 2020, 370, 961–965. [Google Scholar] [CrossRef]
- Mannsfeld, S.C.; Tee, B.C.; Stoltenberg, R.M.; Chen, C.V.; Barman, S.; Muir, B.V.; Sokolov, A.N.; Reese, C.; Bao, Z. Highly sensitive flexible pressure sensors with microstructured rubber dielectric layers. Nat. Mater. 2010, 9, 859–864. [Google Scholar] [CrossRef]
- Xue, X.T.; Zhang, D.G.; Wu, Y.L.; Xing, R.Z.; Li, H.; Yu, T.T.; Bai, B.W.; Tao, Y.B.; Dickey, M.D.; Yang, J.Y. Segregated and Non-Settling Liquid Metal Elastomer via Jamming of Elastomeric Particles. Adv. Funct. Mater. 2022, 33, 2210553. [Google Scholar] [CrossRef]
- Yan, Y.; Hu, Z.; Yang, Z.; Yuan, W.; Song, C.; Pan, J.; Shen, Y. Soft magnetic skin for super-resolution tactile sensing with force self-decoupling. Sci. Robot 2021, 6, eabc8801. [Google Scholar] [CrossRef]
- Ge, G.; Zhang, Y.Z.; Zhang, W.; Yuan, W.; El-Demellawi, J.K.; Zhang, P.; Di Fabrizio, E.; Dong, X.; Alshareef, H.N. Ti3C2Tx MXene-Activated Fast Gelation of Stretchable and Self-Healing Hydrogels: A Molecular Approach. ACS Nano 2021, 15, 2698–2706. [Google Scholar] [CrossRef]
- Jin, Y.; Lin, Y.; Kiani, A.; Joshipura, I.D.; Ge, M.; Dickey, M.D. Materials tactile logic via innervated soft thermochromic elastomers. Nat. Commun. 2019, 10, 4187. [Google Scholar] [CrossRef] [Green Version]
- Ji, B.; Zhou, Q.; Hu, B.; Zhong, J.; Zhou, J.; Zhou, B. Bio-Inspired Hybrid Dielectric for Capacitive and Triboelectric Tactile Sensors with High Sensitivity and Ultrawide Linearity Range. Adv. Mater. 2021, 33, e2100859. [Google Scholar] [CrossRef]
- Ge, G.; Lu, Y.; Qu, X.; Zhao, W.; Ren, Y.; Wang, W.; Wang, Q.; Huang, W.; Dong, X. Muscle-Inspired Self-Healing Hydrogels for Strain and Temperature Sensor. ACS Nano 2020, 14, 218–228. [Google Scholar] [CrossRef]
- Yu, T.T.; Zhang, D.G.; Wu, Y.L.; Guo, S.Z.; Lei, F.; Li, Y.; Yang, J.Y. Graphene foam pressure sensor based on fractal electrode with high sensitivity and wide linear range. Carbon 2021, 182, 497–505. [Google Scholar] [CrossRef]
- Zhang, D.G.; Wang, X.X.; Wu, Y.L.; Song, H.L.; Ma, Z.; Zhang, X.Y.; Yang, X.F.; Xing, R.Z.; Li, Y.; Yang, J.Y. Passive Particle Jamming Variable Stiffness Material-Based Flexible Capacitive Stress Sensor with High Sensitivity and Large Measurement Limit. Adv. Mater. Technol. 2021, 6, 2100106. [Google Scholar] [CrossRef]
- Yang, J.Y.; Kwon, K.Y.; Kanetkar, S.; Xing, R.Z.; Nithyanandam, P.; Li, Y.; Jung, W.; Gong, W.; Tuman, M.; Shen, Q.C.; et al. Skin-Inspired Capacitive Stress Sensor with Large Dynamic Range via Bilayer Liquid Metal Elastomers. Adv. Mater. Technol. 2022, 7, 2101074. [Google Scholar] [CrossRef]
- Lin, W.; Wang, B.; Peng, G.; Shan, Y.; Hu, H.; Yang, Z. Skin-Inspired Piezoelectric Tactile Sensor Array with Crosstalk-Free Row+Column Electrodes for Spatiotemporally Distinguishing Diverse Stimuli. Adv. Sci. 2021, 8, 2002817. [Google Scholar] [CrossRef]
- Lai, Y.C.; Lu, H.W.; Wu, H.M.; Zhang, D.G.; Yang, J.Y.; Ma, J.; Shamsi, M.; Vallem, V.; Dickey, M.D. Elastic Multifunctional Liquid-Metal Fibers for Harvesting Mechanical and Electromagnetic Energy and as Self-Powered Sensors. Adv. Energy Mater. 2021, 11, 2100411. [Google Scholar] [CrossRef]
- Yang, R.; Zhang, W.; Tiwari, N.; Yan, H.; Li, T.; Cheng, H. Multimodal Sensors with Decoupled Sensing Mechanisms. Adv. Sci. 2022, 9, e2202470. [Google Scholar] [CrossRef] [PubMed]
- Trung, T.Q.; Lee, N.E. Flexible and Stretchable Physical Sensor Integrated Platforms for Wearable Human-Activity Monitoringand Personal Healthcare. Adv. Mater. 2016, 28, 4338–4372. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.Y.; Tang, D.; Ao, J.P.; Ghosh, T.; Neumann, T.V.; Zhang, D.G.; Piskarev, Y.; Yu, T.T.; Truong, V.K.; Xie, K.; et al. Ultrasoft Liquid Metal Elastomer Foams with Positive and Negative Piezopermittivity for Tactile Sensing. Adv. Funct. Mater. 2020, 30, 2002611. [Google Scholar] [CrossRef]
- Zhang, D.G.; Zhong, Y.Q.; Wu, Y.L.; Zhang, X.F.; Dickey, M.D.; Yang, J.Y. Liquid metal elastomer with flytrap-inspired pillar structure for stress sensing. Compos. Sci. Technol. 2021, 216, 109066. [Google Scholar] [CrossRef]
- Choi, S.; Han, S.I.; Kim, D.; Hyeon, T.; Kim, D.H. High-performance stretchable conductive nanocomposites: Materials, processes, and device applications. Chem. Soc. Rev. 2019, 48, 1566–1595. [Google Scholar] [CrossRef]
- Wu, Q.; Qiao, Y.; Guo, R.; Naveed, S.; Hirtz, T.; Li, X.; Fu, Y.; Wei, Y.; Deng, G.; Yang, Y.; et al. Triode-Mimicking Graphene Pressure Sensor with Positive Resistance Variation for Physiology and Motion Monitoring. ACS Nano 2020, 14, 10104–10114. [Google Scholar] [CrossRef]
- Zhang, Z.M.; Zhang, Y.X.; Jiang, X.; Bukhari, H.; Zhang, Z.X.; Han, W.H.; Xie, E.Q. Simple and efficient pressure sensor based on PDMS wrapped CNT arrays. Carbon 2019, 155, 71–76. [Google Scholar] [CrossRef]
- Han, S.; Alvi, N.U.H.; Granlof, L.; Granberg, H.; Berggren, M.; Fabiano, S.; Crispin, X. A Multiparameter Pressure-Temperature-Humidity Sensor Based on Mixed Ionic-Electronic Cellulose Aerogels. Adv. Sci. 2019, 6, 1802128. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.L.; Wang, Y.S.; Wan, B.L.; Han, B.G.; Cai, G.C.; Li, Z.Z. Properties and mechanisms of self-sensing carbon nanofibers/epoxy composites for structural health monitoring. Compos. Struct. 2018, 200, 669–678. [Google Scholar] [CrossRef]
- Zhao, S.; Zhang, G.; Gao, Y.; Deng, L.; Li, J.; Sun, R.; Wong, C.P. Strain-driven and ultrasensitive resistive sensor/switch based on conductive alginate/nitrogen-doped carbon-nanotube-supported Ag hybrid aerogels with pyramid design. ACS Appl. Mater. Interfaces 2014, 6, 22823–22829. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, H.; Yang, S.; Shi, X.; Zhang, D.; Shan, C.; Mi, L.; Liu, C.; Shen, C.; Guo, Z. Ultrasensitive and Highly Compressible Piezoresistive Sensor Based on Polyurethane Sponge Coated with a Cracked Cellulose Nanofibril/Silver Nanowire Layer. ACS Appl. Mater. Interfaces 2019, 11, 10922–10932. [Google Scholar] [CrossRef]
- Yang, J.Y.; Ye, Y.S.; Li, X.P.; Lu, X.Z.; Chen, R.J. Flexible, conductive, and highly pressure-sensitive graphene-polyimide foam for pressure sensor application. Compos. Sci. Technol. 2018, 164, 187–194. [Google Scholar] [CrossRef]
- Ai, Y.F.; Hsu, T.H.; Wu, D.C.; Lee, L.; Chen, J.H.; Chen, Y.Z.; Wu, S.C.; Wu, C.; Wang, Z.M.M.; Chueh, Y.L. An ultrasensitive flexible pressure sensor for multimodal wearable electronic skins based on large-scale polystyrene ball@reduced graphene-oxide core-shell nanoparticles. J. Mater. Chem. C 2018, 6, 5514–5520. [Google Scholar] [CrossRef]
- Wang, L.L.; Jackman, J.A.; Tan, E.L.; Park, J.H.; Potroz, M.G.; Hwang, E.T.; Cho, N.J. High-performance, flexible electronic skin sensor incorporating natural microcapsule actuators. Nano Energy 2017, 36, 38–45. [Google Scholar] [CrossRef]
- Davoodi, E.; Montazerian, H.; Haghniaz, R.; Rashidi, A.; Ahadian, S.; Sheikhi, A.; Chen, J.; Khademhosseini, A.; Milani, A.S.; Hoorfar, M.; et al. 3D-Printed Ultra-Robust Surface-Doped Porous Silicone Sensors for Wearable Biomonitoring. ACS Nano 2020, 14, 1520–1532. [Google Scholar] [CrossRef]
- Wang, L.; Wang, D.; Wu, Z.; Luo, J.; Huang, X.; Gao, Q.; Lai, X.; Tang, L.C.; Xue, H.; Gao, J. Self-Derived Superhydrophobic and Multifunctional Polymer Sponge Composite with Excellent Joule Heating and Photothermal Performance for Strain/Pressure Sensors. ACS Appl. Mater. Interfaces 2020, 12, 13316–13326. [Google Scholar] [CrossRef]
- Kim, S.; Amjadi, M.; Lee, T.I.; Jeong, Y.; Kwon, D.; Kim, M.S.; Kim, K.; Kim, T.S.; Oh, Y.S.; Park, I. Wearable, Ultrawide-Range, and Bending-Insensitive Pressure Sensor Based on Carbon Nanotube Network-Coated Porous Elastomer Sponges for Human Interface and Healthcare Devices. ACS Appl. Mater. Interfaces 2019, 11, 23639–23648. [Google Scholar] [CrossRef]
- Kweon, O.Y.; Lee, S.J.; Oh, J.H. Wearable high-performance pressure sensors based on three-dimensional electrospun conductive nanofibers. NPG Asia Mater. 2018, 10, 540–551. [Google Scholar] [CrossRef] [Green Version]
- Guo, Y.; Guo, Z.; Zhong, M.; Wan, P.; Zhang, W.; Zhang, L. A Flexible Wearable Pressure Sensor with Bioinspired Microcrack and Interlocking for Full-Range Human-Machine Interfacing. Small 2018, 14, e1803018. [Google Scholar] [CrossRef]
- Li, Y.; Luo, S.D.; Yang, M.C.; Liang, R.; Zeng, C.C. Poisson Ratio and Piezoresistive Sensing: A New Route to High-Performance 3D Flexible and Stretchable Sensors of Multimodal Sensing Capability. Adv. Funct. Mater. 2016, 26, 2900–2908. [Google Scholar] [CrossRef]
- Huang, X.; Guo, W.; Liu, S.Y.; Li, Y.Y.; Qiu, Y.Q.; Fang, H.; Yang, G.G.; Zhu, K.H.; Yin, Z.P.; Li, Z.; et al. Flexible Mechanical Metamaterials Enabled Electronic Skin for Real-Time Detection of Unstable Grasping in Robotic Manipulation. Adv. Funct. Mater. 2022, 32, 2109109. [Google Scholar] [CrossRef]
- Cao, K.L.; Wu, M.; Bai, J.B.; Wen, Z.; Zhang, J.W.; Wang, T.Y.; Peng, M.W.; Liu, T.; Jia, Z.; Liang, Z.Q.; et al. Beyond Skin Pressure Sensing: 3D Printed Laminated Graphene Pressure Sensing Material Combines Extremely Low Detection Limits with Wide Detection Range. Adv. Funct. Mater. 2022, 32, 2202360. [Google Scholar] [CrossRef]
- Rafiee, M.; Farahani, R.D.; Therriault, D. Multi-Material 3D and 4D Printing: A Survey. Adv. Sci. 2020, 7, 1902307. [Google Scholar] [CrossRef] [PubMed]
- Ravanbakhsh, H.; Karamzadeh, V.; Bao, G.Y.; Mongeau, L.; Juncker, D.; Zhang, Y.S. Emerging Technologies in Multi-Material Bioprinting. Adv. Mater. 2021, 33, 2104730. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Q.; Ji, B.; Hu, B.; Li, S.B.; Xu, Y.; Gao, Y.B.; Wen, W.J.; Zhou, J.; Zhou, B.P. Tilted magnetic micropillars enabled dual-mode sensor for tactile/touchless perceptions. Nano Energy 2020, 78, 105382. [Google Scholar] [CrossRef]
- Pang, Y.; Zhang, K.; Yang, Z.; Jiang, S.; Ju, Z.; Li, Y.; Wang, X.; Wang, D.; Jian, M.; Zhang, Y.; et al. Epidermis Microstructure Inspired Graphene Pressure Sensor with Random Distributed Spinosum for High Sensitivity and Large Linearity. ACS Nano 2018, 12, 2346–2354. [Google Scholar] [CrossRef]
- Chen, D.; Liu, Z.; Li, Y.; Sun, D.; Liu, X.; Pang, J.; Liu, H.; Zhou, W. Unsymmetrical Alveolate PMMA/MWCNT Film as a Piezoresistive E-Skin with Four-Dimensional Resolution and Application for Detecting Motion Direction and Airflow Rate. ACS Appl. Mater. Interfaces 2020, 12, 30896–30904. [Google Scholar] [CrossRef]
- Luo, Z.; Chen, J.; Zhu, Z.; Li, L.; Su, Y.; Tang, W.; Omisore, O.M.; Wang, L.; Li, H. High-Resolution and High-Sensitivity Flexible Capacitive Pressure Sensors Enhanced by a Transferable Electrode Array and a Micropillar-PVDF Film. ACS Appl. Mater. Interfaces 2021, 13, 7635–7649. [Google Scholar] [CrossRef]
- Lu, Y.; He, Y.; Qiao, J.; Niu, X.; Li, X.; Liu, H.; Liu, L. Highly Sensitive Interlocked Piezoresistive Sensors Based on Ultrathin Ordered Nanocone Array Films and Their Sensitivity Simulation. ACS Appl. Mater. Interfaces 2020, 12, 55169–55180. [Google Scholar] [CrossRef]
- Kim, Y.; Yang, H.; Oh, J.H. Simple fabrication of highly sensitive capacitive pressure sensors using a porous dielectric layer with cone-shaped patterns. Mater. Des. 2021, 197, 109203. [Google Scholar] [CrossRef]
- Hwang, J.; Kim, Y.; Yang, H.; Oh, J.H. Fabrication of hierarchically porous structured PDMS composites and their application as a flexible capacitive pressure sensor. Compos. Part B-Eng. 2021, 211, 108607. [Google Scholar] [CrossRef]
- Huang, L.X.; Wang, H.; Zhan, D.H.; Fang, F.Y. Flexible Capacitive Pressure Sensor Based on Laser-Induced Graphene and Polydimethylsiloxane Foam. IEEE Sens. J. 2021, 21, 12048–12056. [Google Scholar] [CrossRef]
- Parameswaran, C.; Chaudhary, R.P.; Prutvi, S.H.; Gupta, D. Rapid One Step Fabrication of Hydrophilic Hierarchical Porous PDMS with Negative Piezopermittivity for Sensing and Energy Storage Applications. ACS Appl. Polym. Mater. 2022, 4, 2047–2056. [Google Scholar] [CrossRef]
- Li, Y.; Cui, Y.; Zhang, M.; Li, X.; Li, R.; Si, W.; Sun, Q.; Yu, L.; Huang, C. Ultrasensitive Pressure Sensor Sponge Using Liquid Metal Modulated Nitrogen-Doped Graphene Nanosheets. Nano Lett. 2022, 22, 2817–2825. [Google Scholar] [CrossRef]
- Wang, J.; Lou, Y.; Wang, B.; Sun, Q.; Zhou, M.; Li, X. Highly Sensitive, Breathable, and Flexible Pressure Sensor Based on Electrospun Membrane with Assistance of AgNW/TPU as Composite Dielectric Layer. Sensors 2020, 20, 2459. [Google Scholar] [CrossRef]
- Zhang, Y.J.; Zhao, Y.; Zhai, W.; Zheng, G.Q.; Ji, Y.X.; Dai, K.; Mi, L.W.; Zhang, D.B.; Liu, C.T.; Shen, C.Y. Multifunctional interlocked e-skin based on elastic micropattern array facilely prepared by hot-air-gun. Chem. Eng. J. 2021, 407, 127960. [Google Scholar] [CrossRef]
- Yin, Y.; Wang, Y.; Li, H.; Xu, J.; Zhang, C.; Li, X.; Cao, J.; Feng, H.; Zhu, G. A flexible dual parameter sensor with hierarchical porous structure for fully decoupled pressure–temperature sensing. Chem. Eng. J. 2022, 430, 133158. [Google Scholar] [CrossRef]
- Cicek, M.O.; Doganay, D.; Durukan, M.B.; Gorur, M.C.; Unalan, H.E. Seamless Monolithic Design for Foam Based, Flexible, Parallel Plate Capacitive Sensors. Adv. Mater. Technol. 2021, 6, 2001168. [Google Scholar] [CrossRef]
- Zhao, Z.; Guo, Q.K.; Sun, Y.; An, N.L.; Hui, P.Z.; Yang, L.H.; Chen, X.F. Bioinspired Hierarchical Structure for an Ultrawide-Range Multifunctional Flexible Sensor Using Porous Expandable Polyethylene/Loofah-Like Polyurethane Sponge Material. Adv. Intell. Syst. 2023, 5, 2200295. [Google Scholar] [CrossRef]
- Lee, J.; Kim, J.; Shin, Y.; Jung, I. Ultra-robust wide-range pressure sensor with fast response based on polyurethane foam doubly coated with conformal silicone rubber and CNT/TPU nanocomposites islands. Compos. Part B-Eng. 2019, 177, 107364. [Google Scholar] [CrossRef]
- Tang, Z.; Jia, S.; Zhou, C.; Li, B. 3D Printing of Highly Sensitive and Large-Measurement-Range Flexible Pressure Sensors with a Positive Piezoresistive Effect. ACS Appl. Mater. Interfaces 2020, 12, 28669–28680. [Google Scholar] [CrossRef] [PubMed]
- Lu, X.Z.; Yu, T.T.; Meng, F.C.; Bao, W.M. Wide-Range and High-Stability Flexible Conductive Graphene/Thermoplastic Polyurethane Foam for Piezoresistive Sensor Applications. Adv. Mater. Technol. 2021, 6, 2100248. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, T.; Tao, Y.; Wu, Y.; Zhang, D.; Yang, J.; Ge, G. Heterogeneous Multi-Material Flexible Piezoresistive Sensor with High Sensitivity and Wide Measurement Range. Micromachines 2023, 14, 716. https://doi.org/10.3390/mi14040716
Yu T, Tao Y, Wu Y, Zhang D, Yang J, Ge G. Heterogeneous Multi-Material Flexible Piezoresistive Sensor with High Sensitivity and Wide Measurement Range. Micromachines. 2023; 14(4):716. https://doi.org/10.3390/mi14040716
Chicago/Turabian StyleYu, Tingting, Yebo Tao, Yali Wu, Dongguang Zhang, Jiayi Yang, and Gang Ge. 2023. "Heterogeneous Multi-Material Flexible Piezoresistive Sensor with High Sensitivity and Wide Measurement Range" Micromachines 14, no. 4: 716. https://doi.org/10.3390/mi14040716
APA StyleYu, T., Tao, Y., Wu, Y., Zhang, D., Yang, J., & Ge, G. (2023). Heterogeneous Multi-Material Flexible Piezoresistive Sensor with High Sensitivity and Wide Measurement Range. Micromachines, 14(4), 716. https://doi.org/10.3390/mi14040716