

An In-Situ Tester for Extracting Piezoresistive Coefficients


Abstract
:1. Introduction
2. Theoretical Model and Design Concept
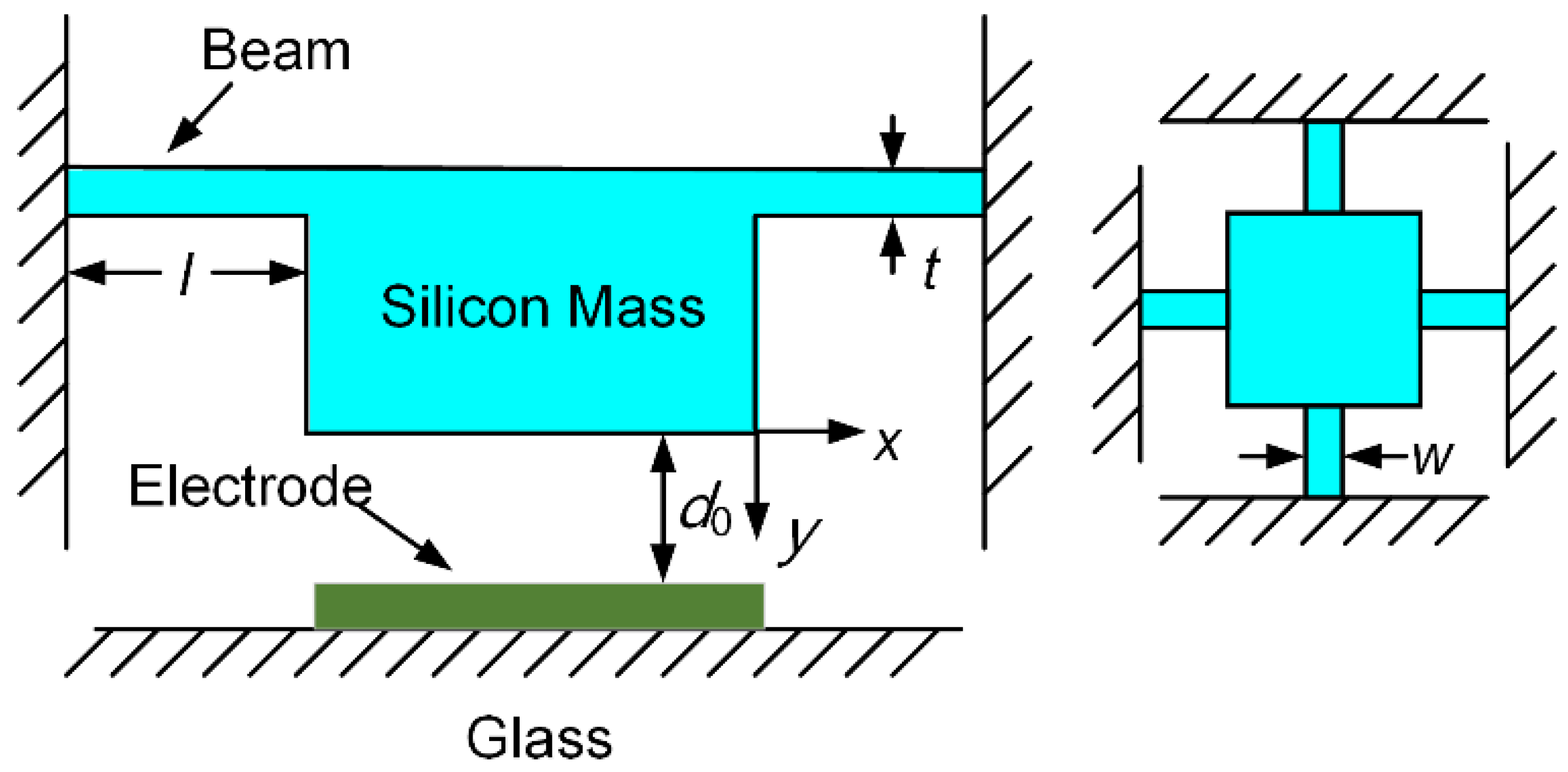
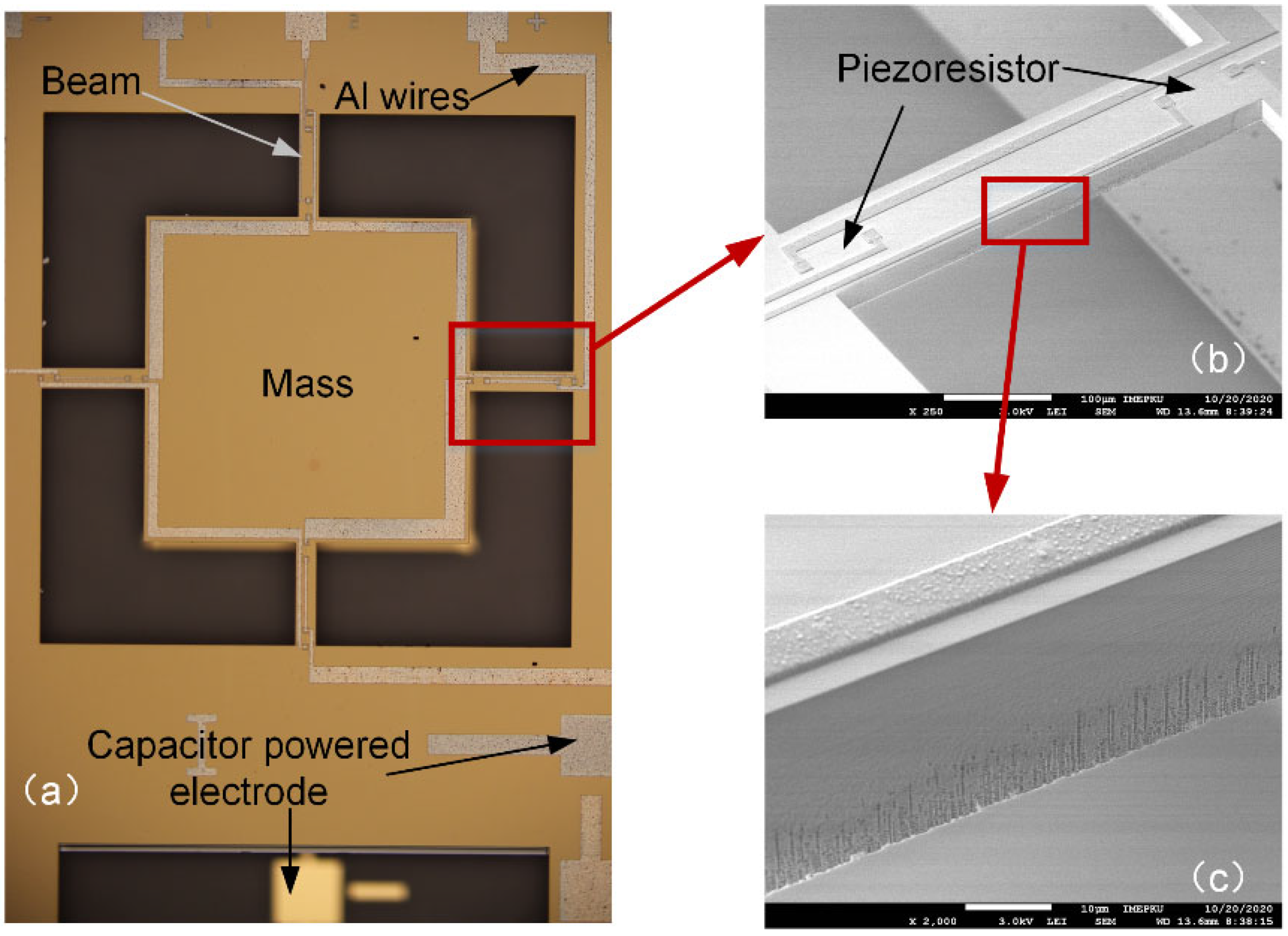
2.1. Structure of FGCBs
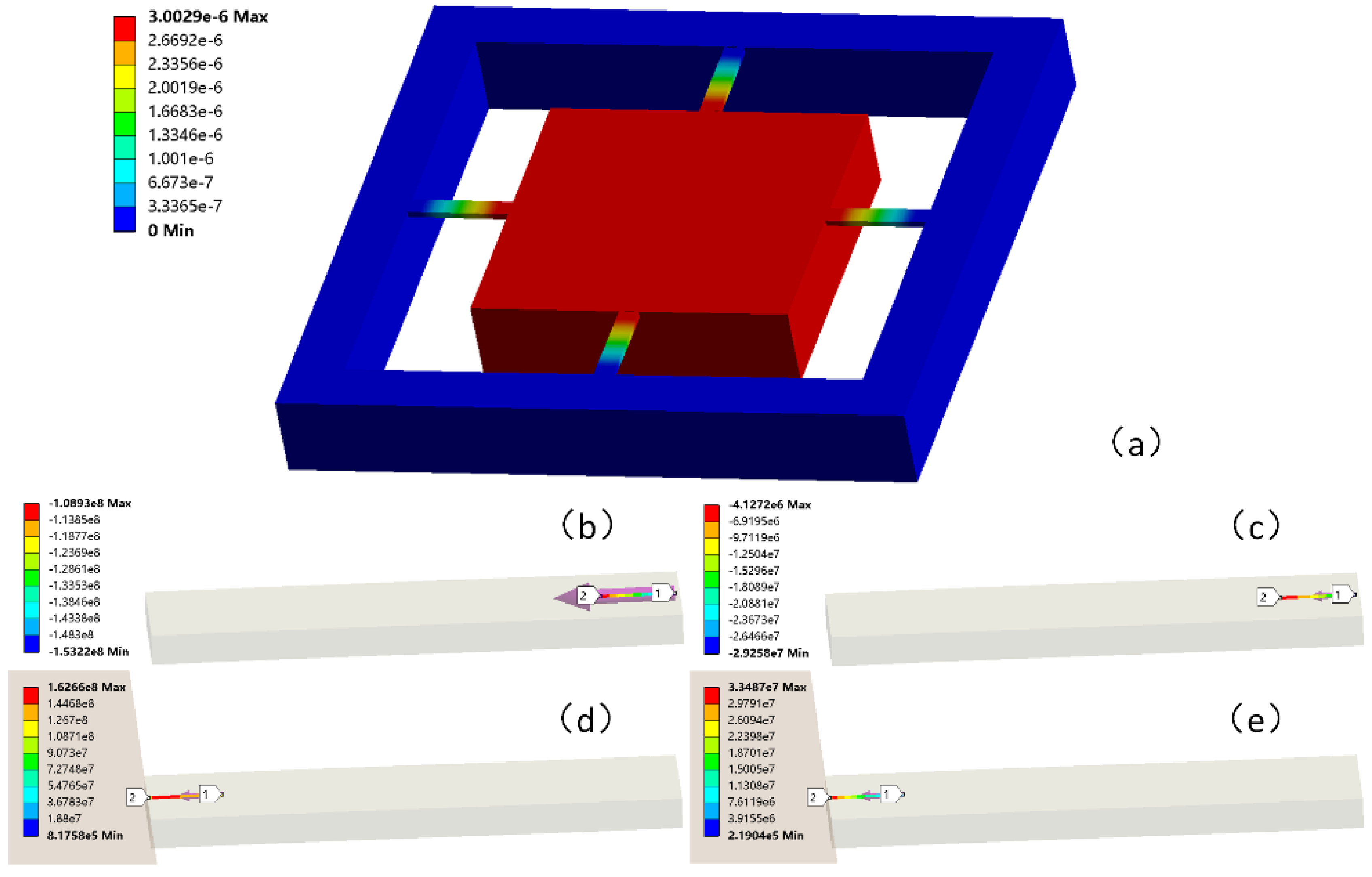
2.2. Pull-In Model
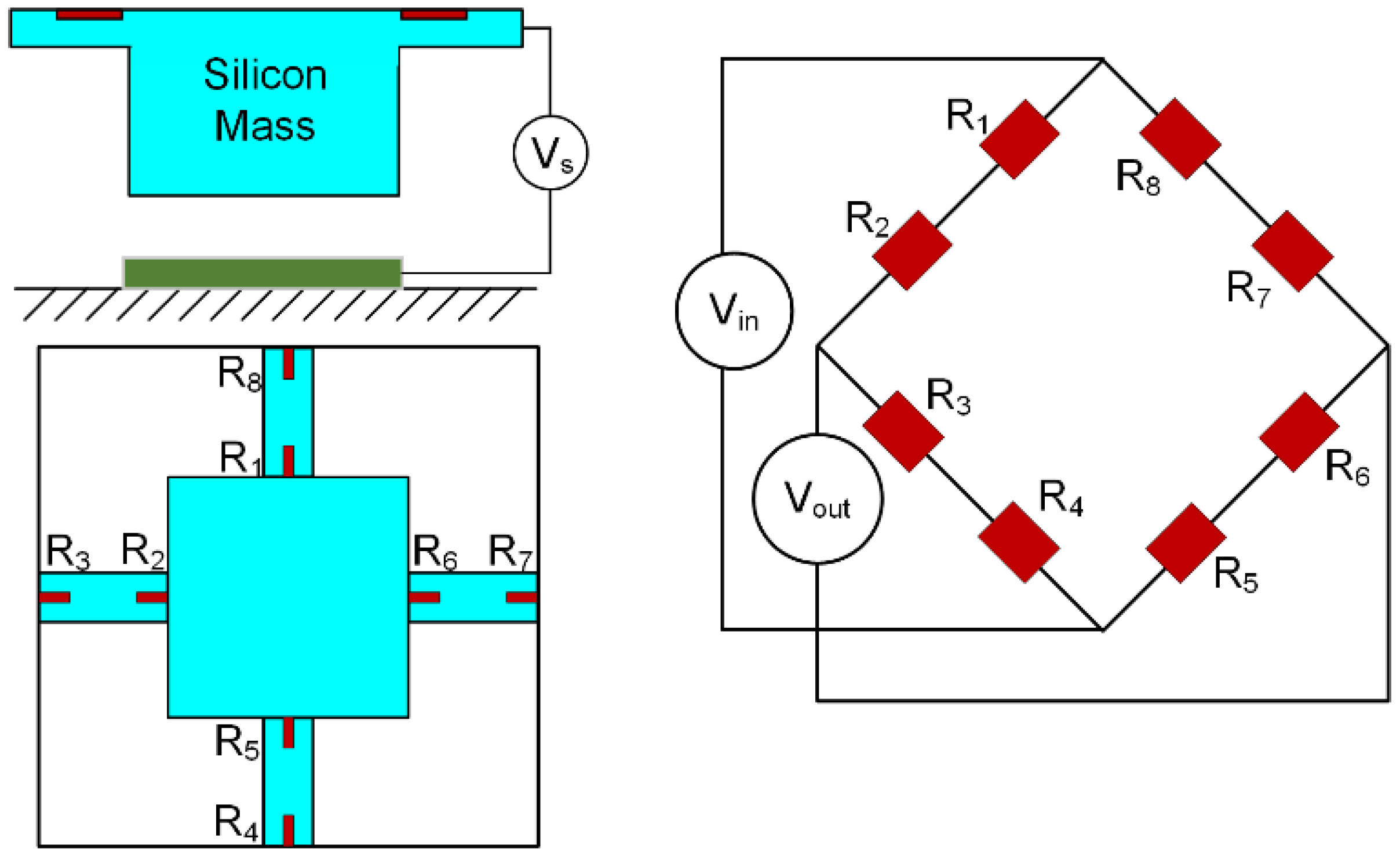
2.3. Piezoresistive Coefficient Measuring Circuit
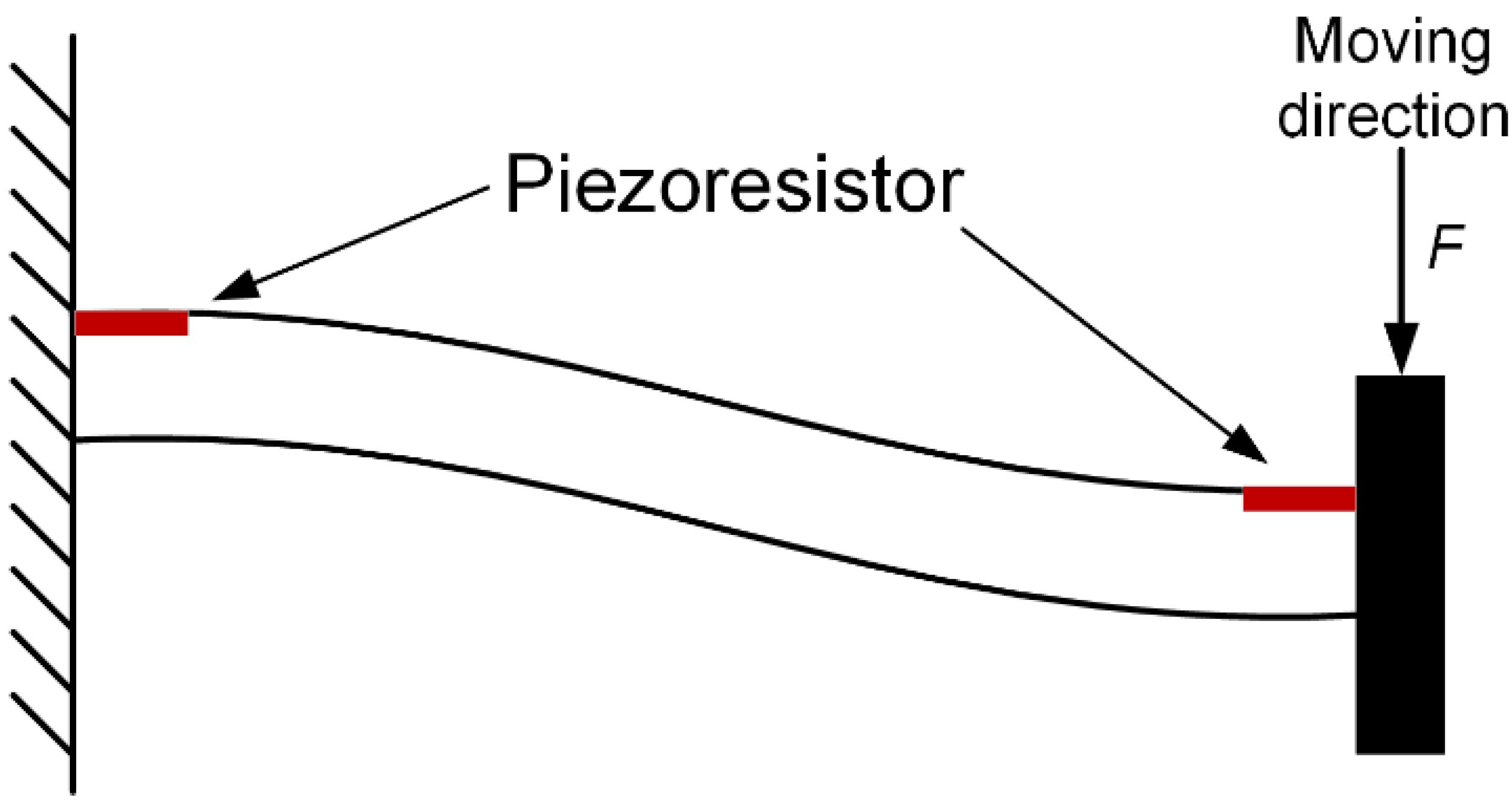
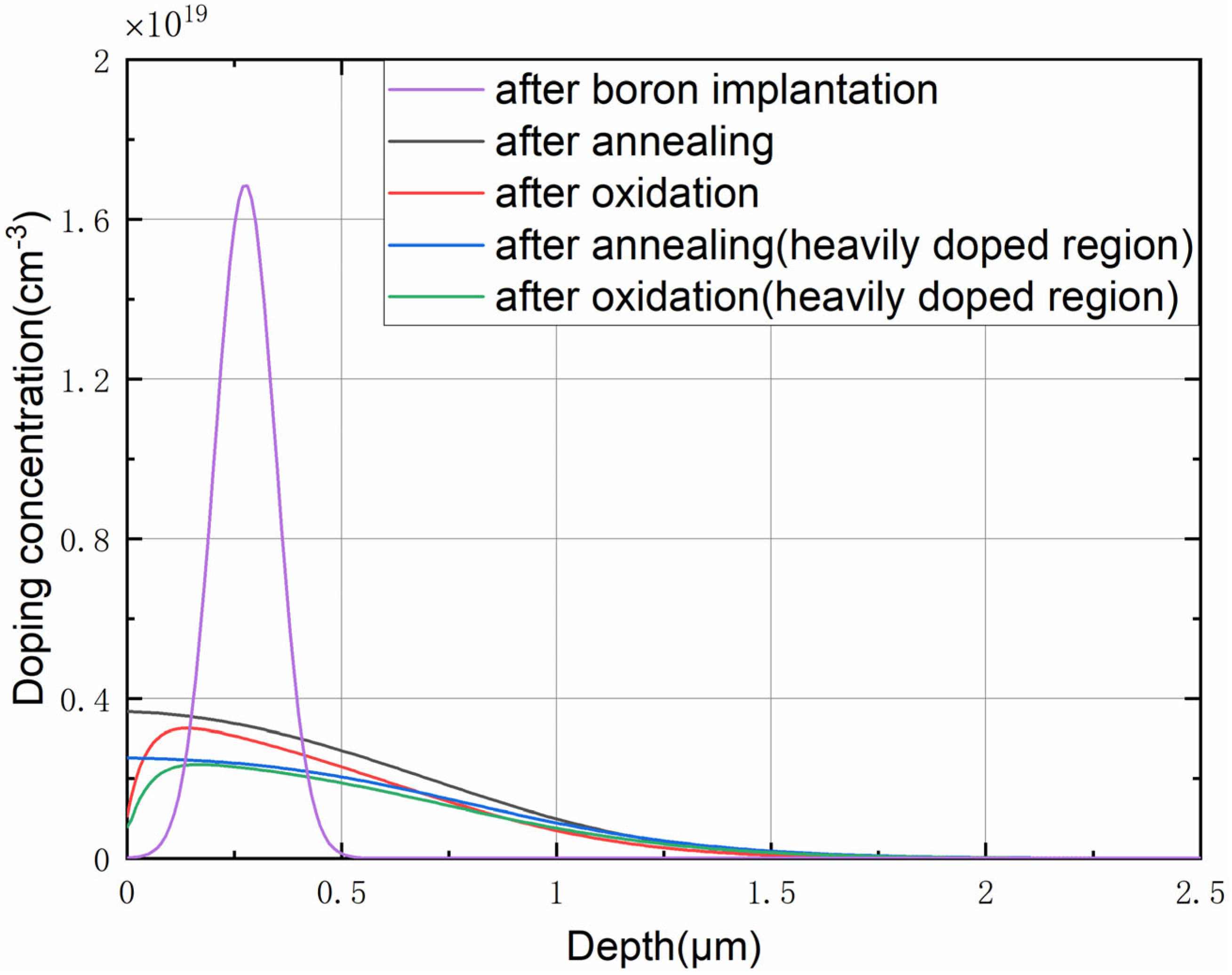
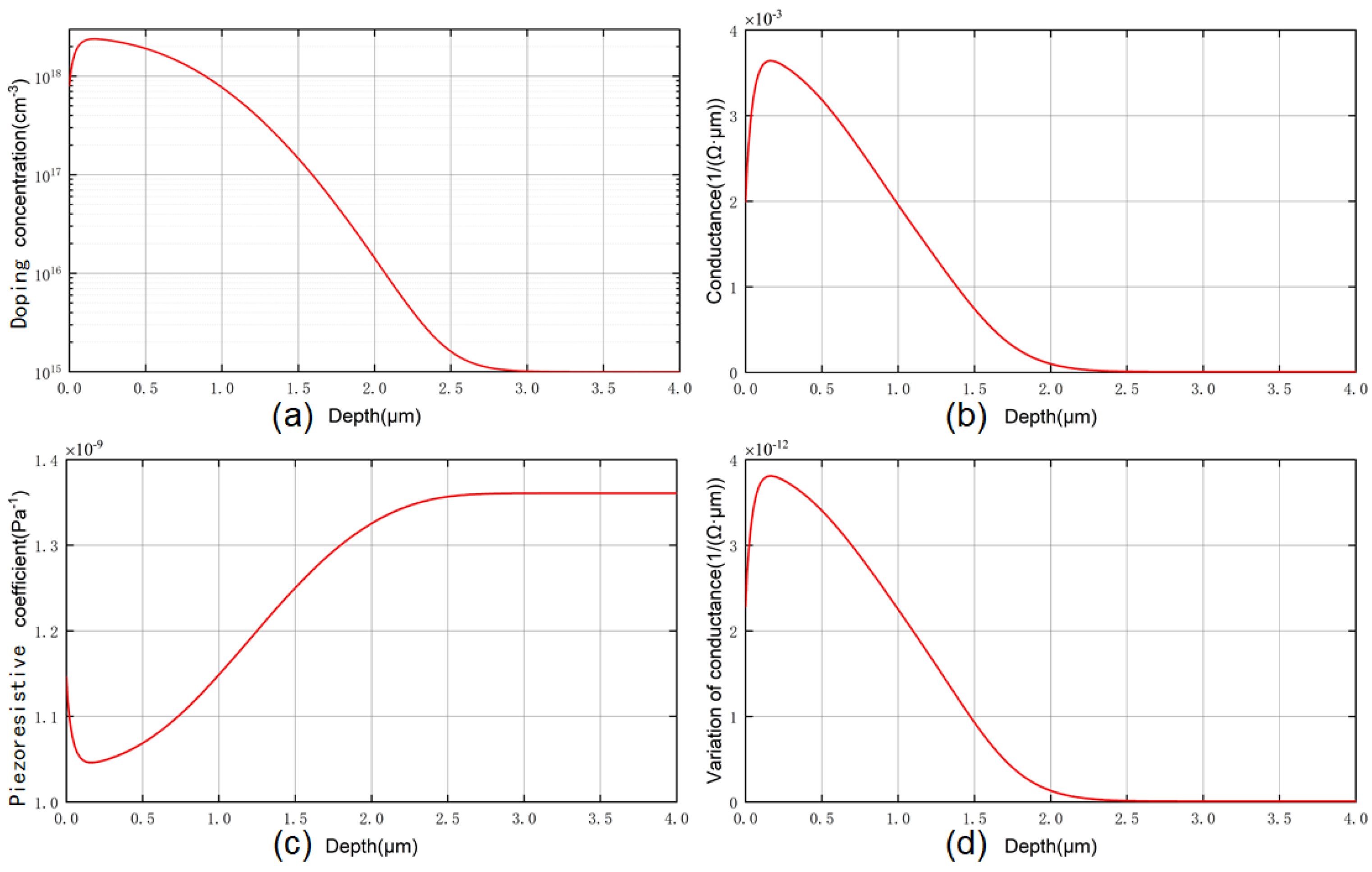
2.4. Piezoresistive Coefficient Based on Doping Concentration Distribution
3. Analysis of Measurement Uncertainty
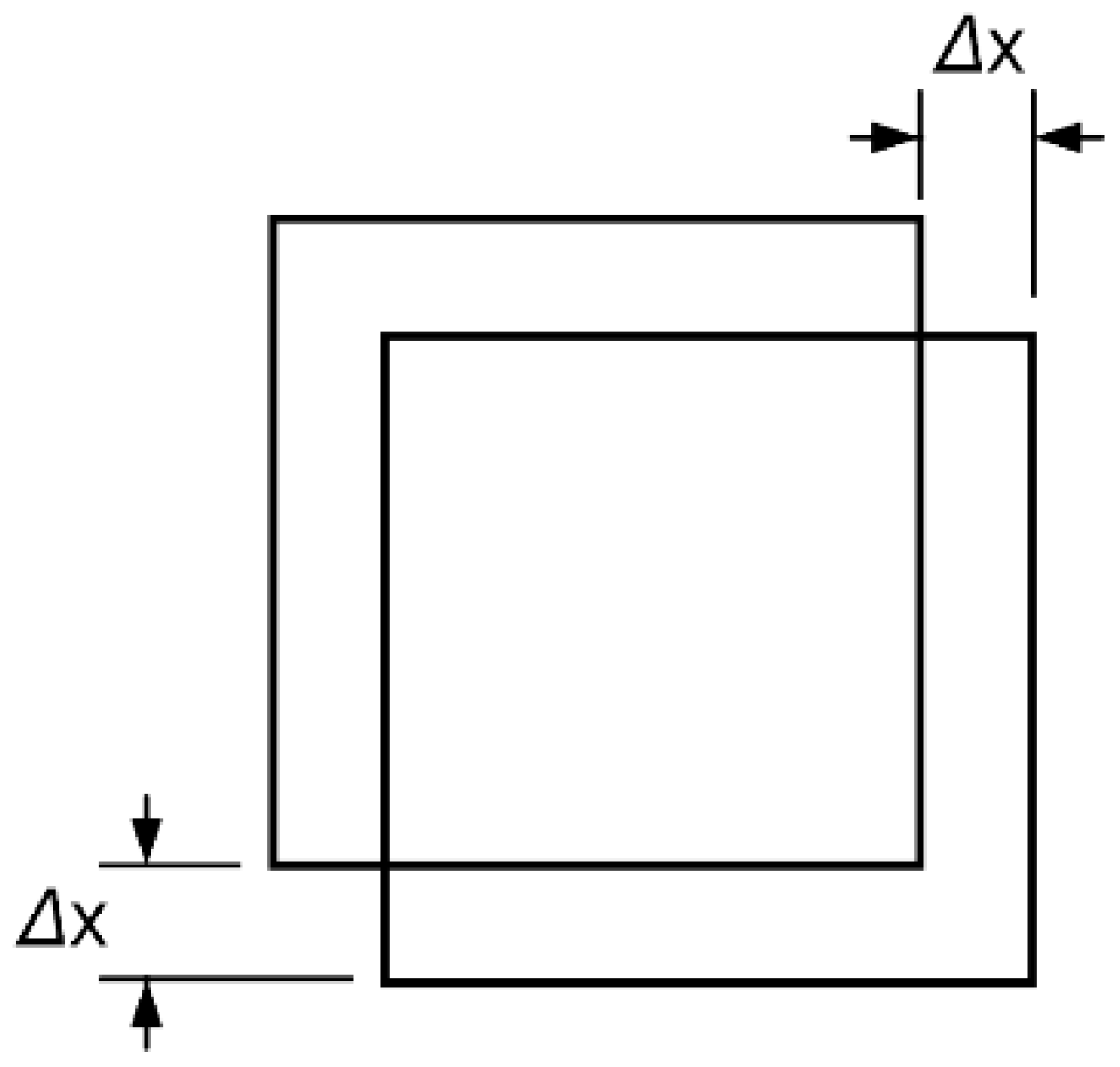
3.1. Alignment Error
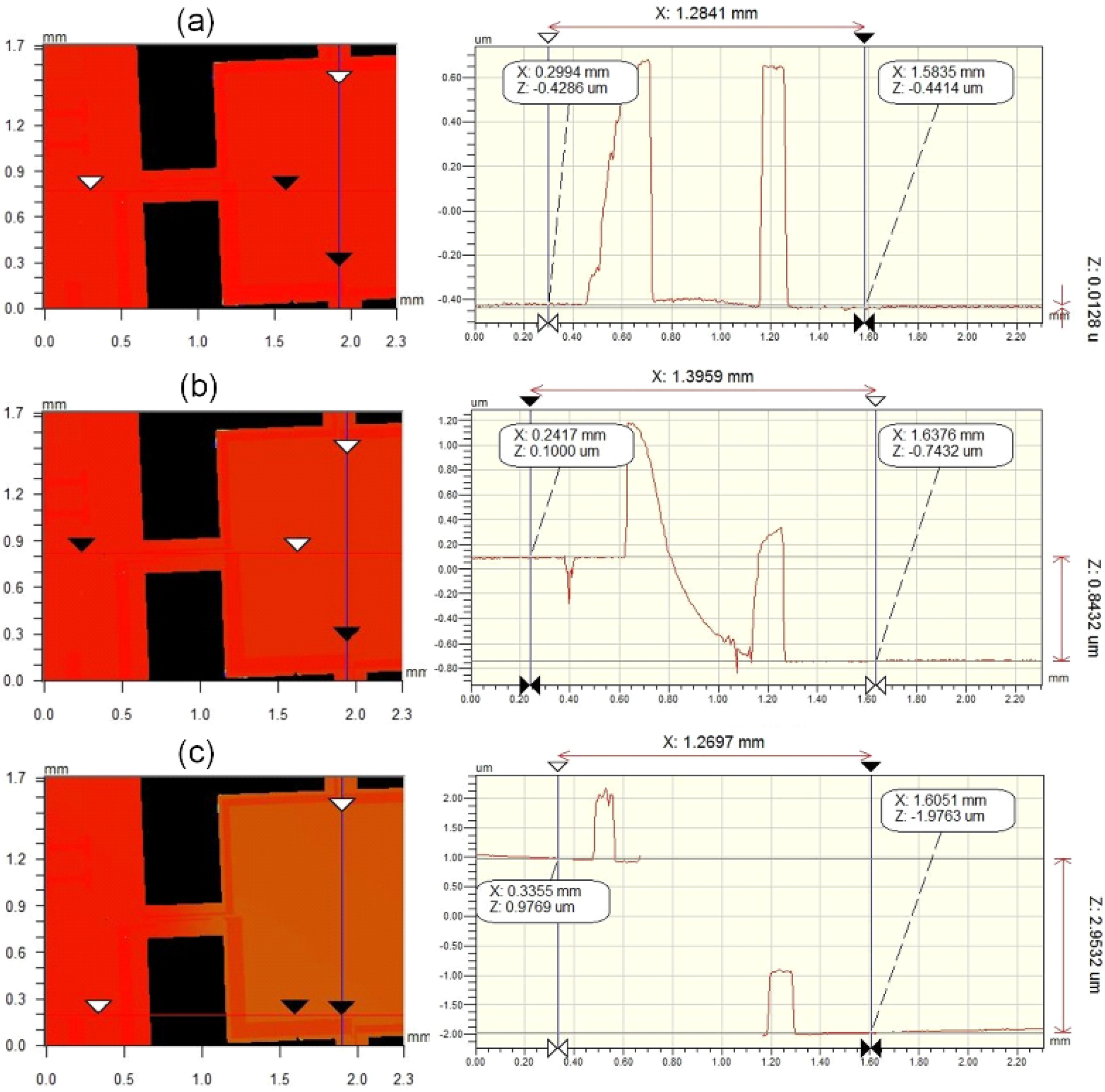
3.2. Line Width
3.3. Vibration
3.4. Temperature
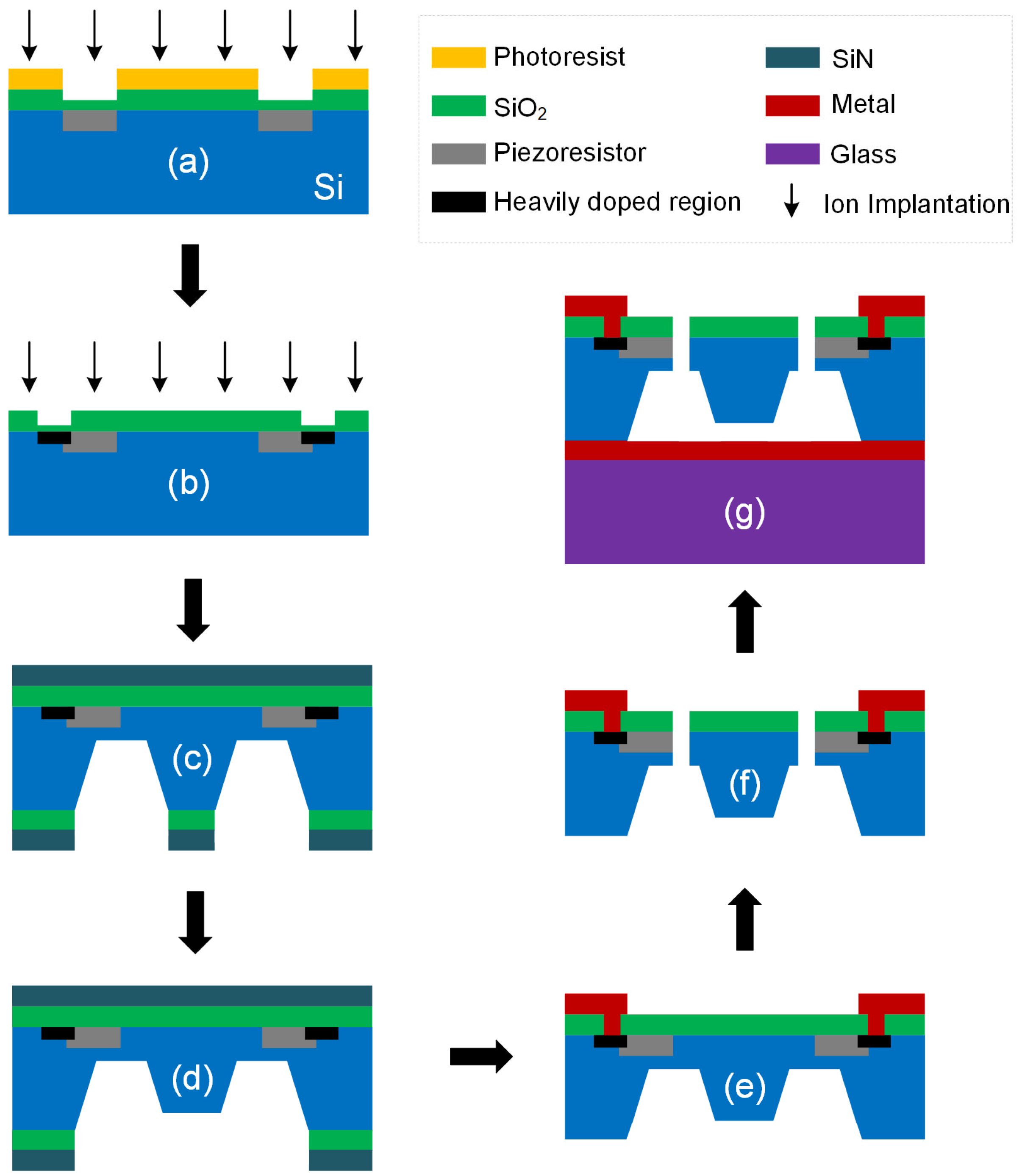
4. Fabrication Process
5. Experimental Results and Discussion
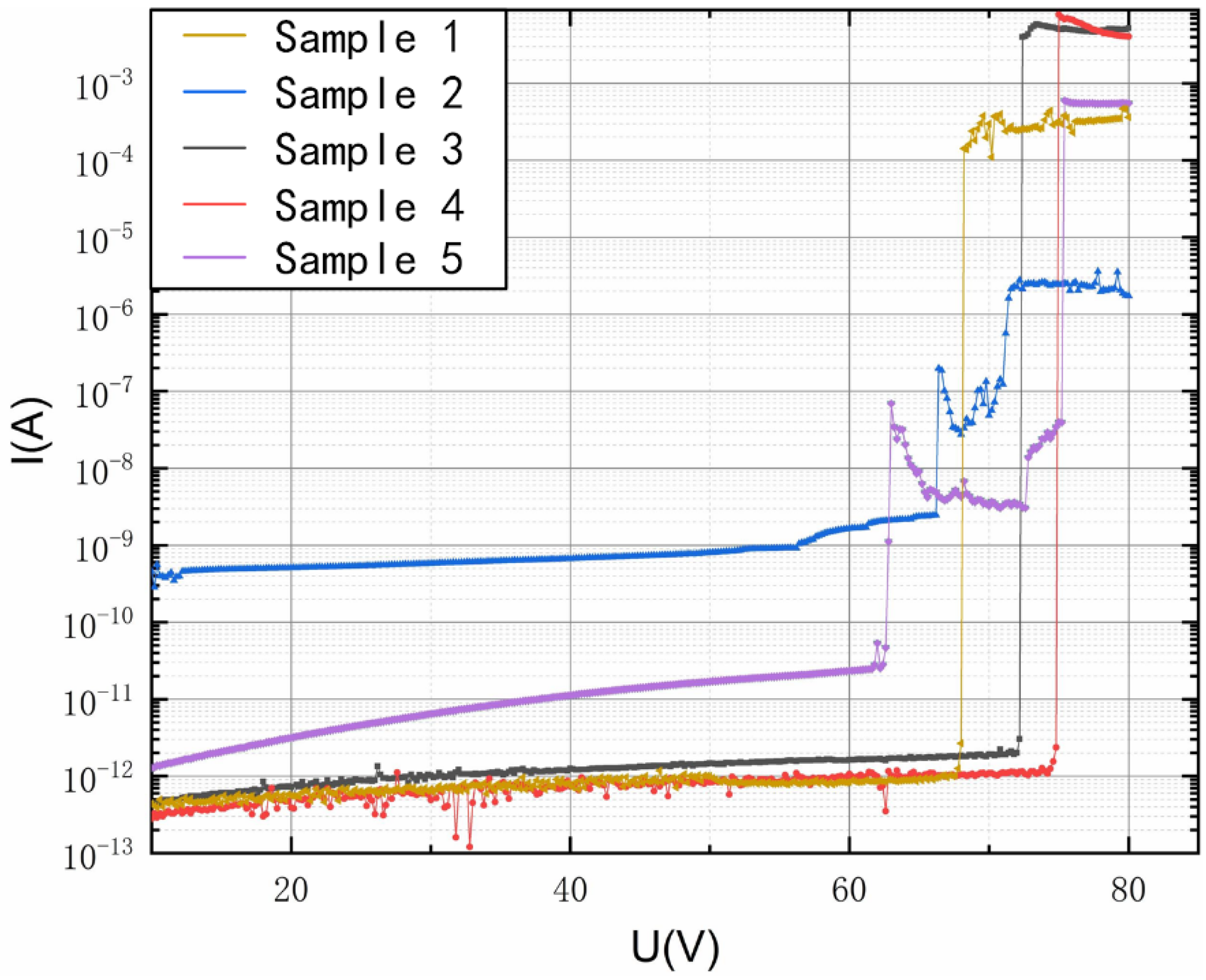
5.1. Effective Stiffness
5.2. Piezoresistive Coefficient
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Smith, C.S. Piezoresistance effect in germanium and silicon. Phys. Rev. 1954, 94, 42–49. [Google Scholar] [CrossRef]
- Balbola, A.A.; Kayed, M.O.; Moussa, W.A. Studying the influence of n-type strained (111) silicon on the piezoresistive coefficients. IEEE Sens. J. 2016, 17, 302–310. [Google Scholar] [CrossRef]
- Tufte, O.N.; Stelzer, E.L. Piezoresistive properties of silicon diffused layers. J. Appl. Phys. 1963, 34, 313–318. [Google Scholar] [CrossRef]
- Matsuda, K.; Suzuki, K.; Yamamura, K.; Kanda, Y. Nonlinear piezoresistance effects in silicon. J. Appl. Phys. 1993, 73, 1838–1847. [Google Scholar] [CrossRef]
- Suthram, S.; Ziegert, J.C.; Nishida, T.; Thompson, S.E. Piezoresistive coefficients of (100) Silicon nMOSFETs Measured at Low and High Channel Stress. IEEE Electron Device Lett. 2006, 28, 58–61. [Google Scholar] [CrossRef]
- Lund, E.; Finstad, T.G. Design and construction of a four-point bending based set-up for measurement of piezoresistance in semiconductors. Rev. Sci. Instrum. 2004, 75, 4960–4966. [Google Scholar] [CrossRef]
- Cho, C.H.; Jaeger, R.C.; Suhling, J.C. Characterization of the Temperature Dependence of the Piezoresistive Coefficients of Silicon From −150 °C to +125 °C. IEEE Sens. J. 2008, 8, 1455–1468. [Google Scholar] [CrossRef]
- Jaeger, R.C.; Suhling, J.C.; Carey, M.T.; Johnson, R.W. Off-axis sensor rosettes for measurement of the piezoresistive coefficients of silicon. IEEE Trans. Compon. Hybrids Manuf. Technol. 2002, 16, 925–931. [Google Scholar] [CrossRef]
- Richter, J.; Pedersen, J.; Brandbyge, M.; Thomsen, E.V.; Hansen, O. Piezoresistance in p-type silicon revisited. J. Appl. Phys. 2008, 104, 023715. [Google Scholar] [CrossRef]
- Petersen, K.E. Dynamic micromechanics on silicon: Techniques and devices. IEEE Trans. Electron Devices 1978, 25, 1241–1250. [Google Scholar] [CrossRef]
- Wan, J.X.; Tang, L.Y.; Chen, W.J.; Tong, M.S. A digital compensation method for piezoresistive pressure sensor. In Proceedings of the 2016 Progress in Electromagnetic Research Symposium, Shanghai, China, 8–11 August 2016. [Google Scholar]
- Lauer, K.; Brokmann, G.; Bähr, M.; Ortlepp, T. Determination of piezo-resistive coefficient π 44 in p-type silicon by comparing simulation and measurement of pressure sensors. AIP Adv. 2021, 11, 085005. [Google Scholar] [CrossRef]
- Osterberg, P.M.; Senturia, S.D. M-TEST: A test chip for MEMS material property measurement using electrostatically actuated test structures. J. Microelectromech. Syst. 1997, 6, 107–118. [Google Scholar] [CrossRef]
- Tan, S.I.; Berry, B.S.; Crowder, B.L. Elastic and Anelastic Behavior of Ion-Implanted Silicon. Appl. Phys. Lett. 1972, 20, 88–90. [Google Scholar] [CrossRef]
- Kulikovsky, V.; Vorlíček, V.; Boháč, P.; Stranyánek, M.; Čtvrtlík, R.; Kurdyumov, A. Mechanical properties of amorphous and microcrystalline silicon films. Thin Solid Film. 2005, 516, 5368–5375. [Google Scholar] [CrossRef]
- Saxena, S.; Sharma, R.; Pant, B.D. Design and development of guided four beam cantilever type MEMS based piezoelectric energy harvester. Microsyst. Technol. 2016, 23, 1751–1759. [Google Scholar] [CrossRef]
- Goldsmith, C.L.; Malczewski, A.; Yao, Z.J.; Chen, S.; Ehmke, J.; Hinzel, D.H. RF MEMs variable capacitors for tunable filters. Int. J. RF Microw. Comput.-Aided Eng. 2015, 9, 362–374. [Google Scholar] [CrossRef]
- Jensen, B.D.; de Boer, M.P.; Masters, N.D.; Bitsie, F.; LaVan, D.A. Interferometry of actuated microcantilevers to determine material properties and test structure nonidealities in MEMS. J. Microelectromech. Syst. 2001, 10, 336–346. [Google Scholar] [CrossRef]
- Oberg, E.; Jones, F.D.; Horton, H.L.; Ryffel, H.H.; Mccauley, C.J.; Heald, R.; Hussain, M.I. Beams, Beam Calculations. In Machinery Handbook; Industrial Press Inc.: New York, NY, USA, 2009; pp. 257–264. [Google Scholar]
- Guan, T.; Yang, F.; Wang, W.; Huang, X.; Jiang, B.; Zhang, D. The Design and Analysis of Piezoresistive Shuriken-structured Diaphragm Micro-Pressure Sensors. J. Microelectromech. Syst. 2017, 26, 206–214. [Google Scholar] [CrossRef]
- Kanda, Y. A graphical representation of the piezoresistive coefficients in silicon. IEEE Trans. Electron Devices 1982, 29, 64–70. [Google Scholar] [CrossRef]
- Doll, J.C.; Pruitt, B.L. Microsystems and Nanosystems. In Piezoresistor Design and Applications; Springer: New York, NY, USA, 2013; pp. 129–130. [Google Scholar]
- Arora, N.D.; Hauser, J.R.; Roulston, D.J. Electron and hole mobilities in silicon as a function of concentration and temperature. IEEE Trans. Electron Devices 1982, 29, 292–295. [Google Scholar] [CrossRef]
- Wortman, J.J.; Evans, R.A. Young’s modulus, shear modulus, and Poisson’s ratio in silicon and germanium. J. Appl. Phys. 1965, 36, 153–156. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Parameter | Measured Value from SEM | Difference (%) |
|---|---|---|
| l = 500 μm | l = 501.3 μm | 0.26 |
| w = 100 μm | w = 100.5 μm | 0.5 |
| t = 30 μm | t = 30.8 μm | 2.7 |
| A = 2.5 × 106 μm2 | A = 2.5 × 106 μm2 | - |
| d0 = 3 μm | d0 = 2.95 μm | 1.6 |
| L = 70 μm | - | - |
| W = 10 μm | - | - |
| Sample Number | Pull-In Voltage (V) | Effective Stiffness (N/m) | Effective Young’s Modulus (GPa) |
|---|---|---|---|
| 1 | 68.0 | 3198.6 | 147.9 |
| 2 | 71.0 | 3487.0 | 161.2 |
| 3 | 71.2 | 3506.7 | 162.1 |
| 4 | 74.6 | 3849.6 | 178.0 |
| 5 | 75.2 | 3911.8 | 180.8 |
| Sample Number | Pull-In Voltage (V) | Shear Piezoresistive Coefficient (Pa−1) |
|---|---|---|
| 1 | 68.0 | 10.556 × 10−10 |
| 2 | 71.0 | 10.170 × 10−10 |
| 3 | 71.2 | 9.845 × 10−10 |
| 4 | 74.6 | 9.554 × 10−10 |
| 5 | 75.2 | 9.128 × 10−10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, F.; Yu, R.; Zhang, D. An In-Situ Tester for Extracting Piezoresistive Coefficients. Micromachines 2023, 14, 885. https://doi.org/10.3390/mi14040885
Li F, Yu R, Zhang D. An In-Situ Tester for Extracting Piezoresistive Coefficients. Micromachines. 2023; 14(4):885. https://doi.org/10.3390/mi14040885
Chicago/Turabian StyleLi, Fengyang, Runze Yu, and Dacheng Zhang. 2023. "An In-Situ Tester for Extracting Piezoresistive Coefficients" Micromachines 14, no. 4: 885. https://doi.org/10.3390/mi14040885
APA StyleLi, F., Yu, R., & Zhang, D. (2023). An In-Situ Tester for Extracting Piezoresistive Coefficients. Micromachines, 14(4), 885. https://doi.org/10.3390/mi14040885