
FEM Analysis of Buckled Dielectric Thin-Film Packaging Based on 3D Direct Numerical Simulation


Abstract
:1. Introduction
2. Thin-Film Transfer Packaging Process
3. Theory of Thin-Film Buckling on Polymer Substrate
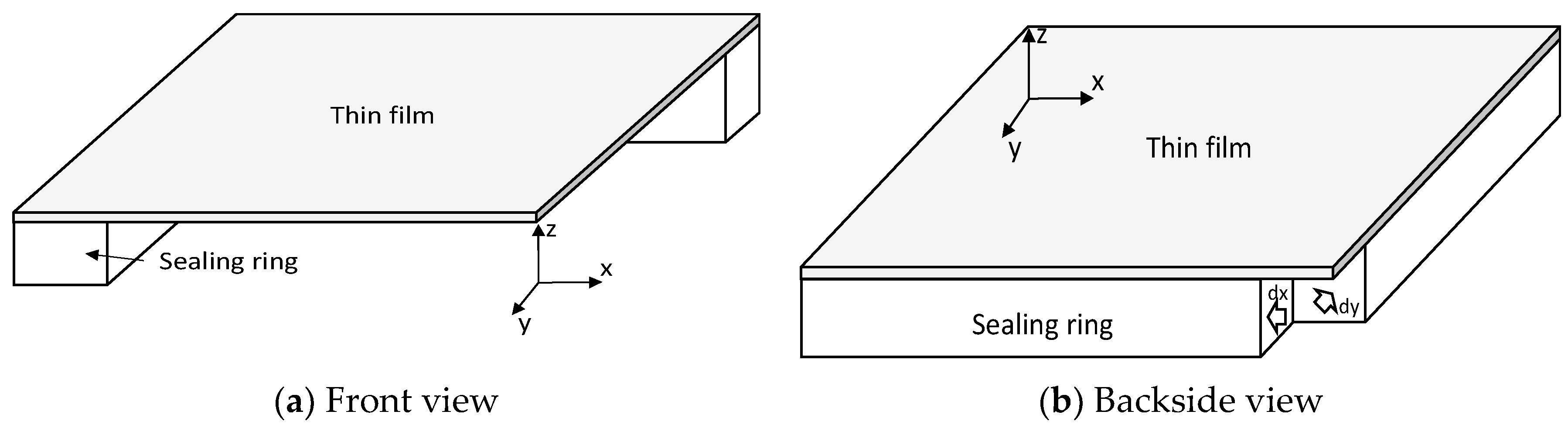
4. Direct 3D FEM Modeling and Simulation
4.1. Uniaxial Loading of Thin Film/Polymeric Ring Stack
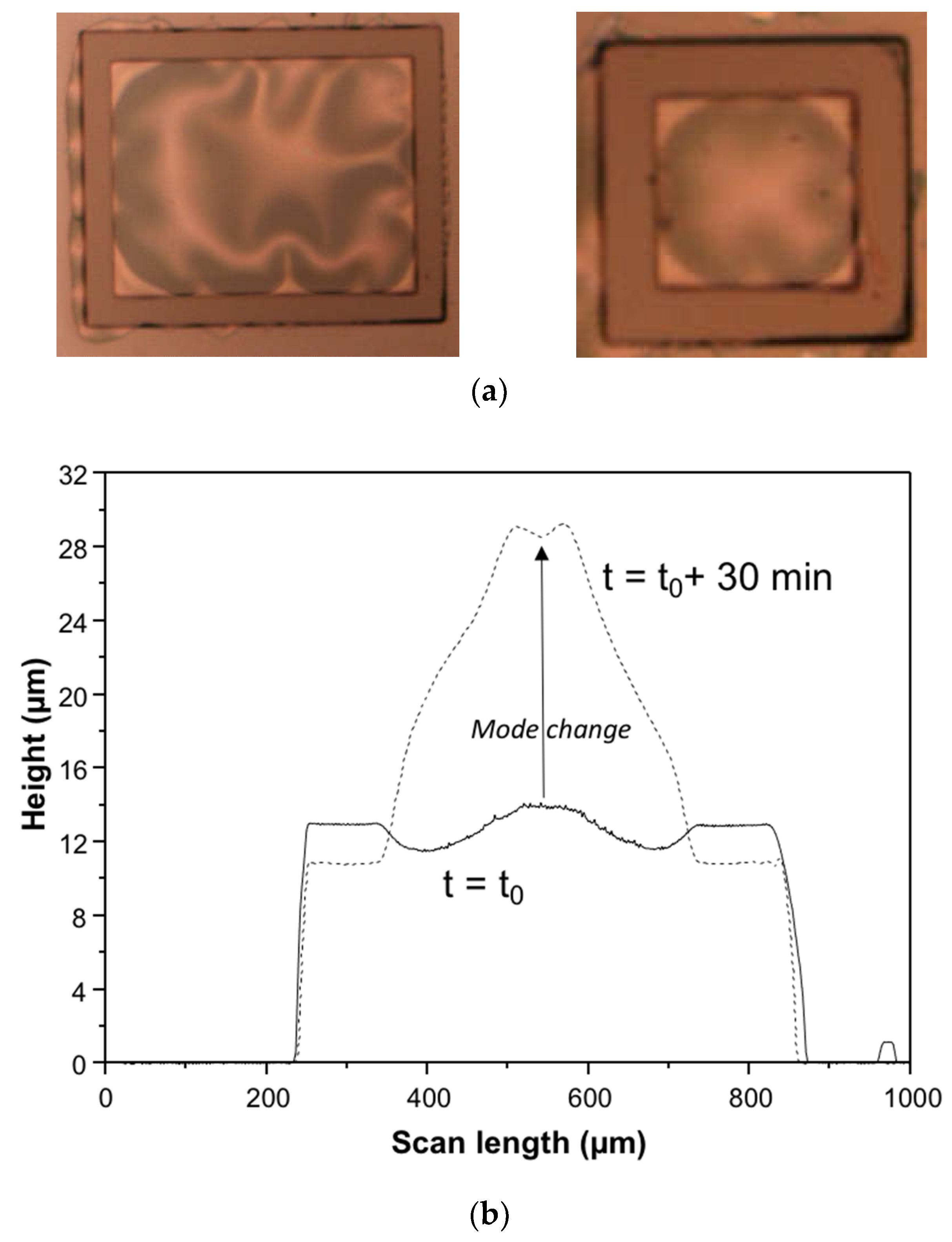
4.2. Buckled Thin-Film Package Transferred on Polymer Sealing Ring
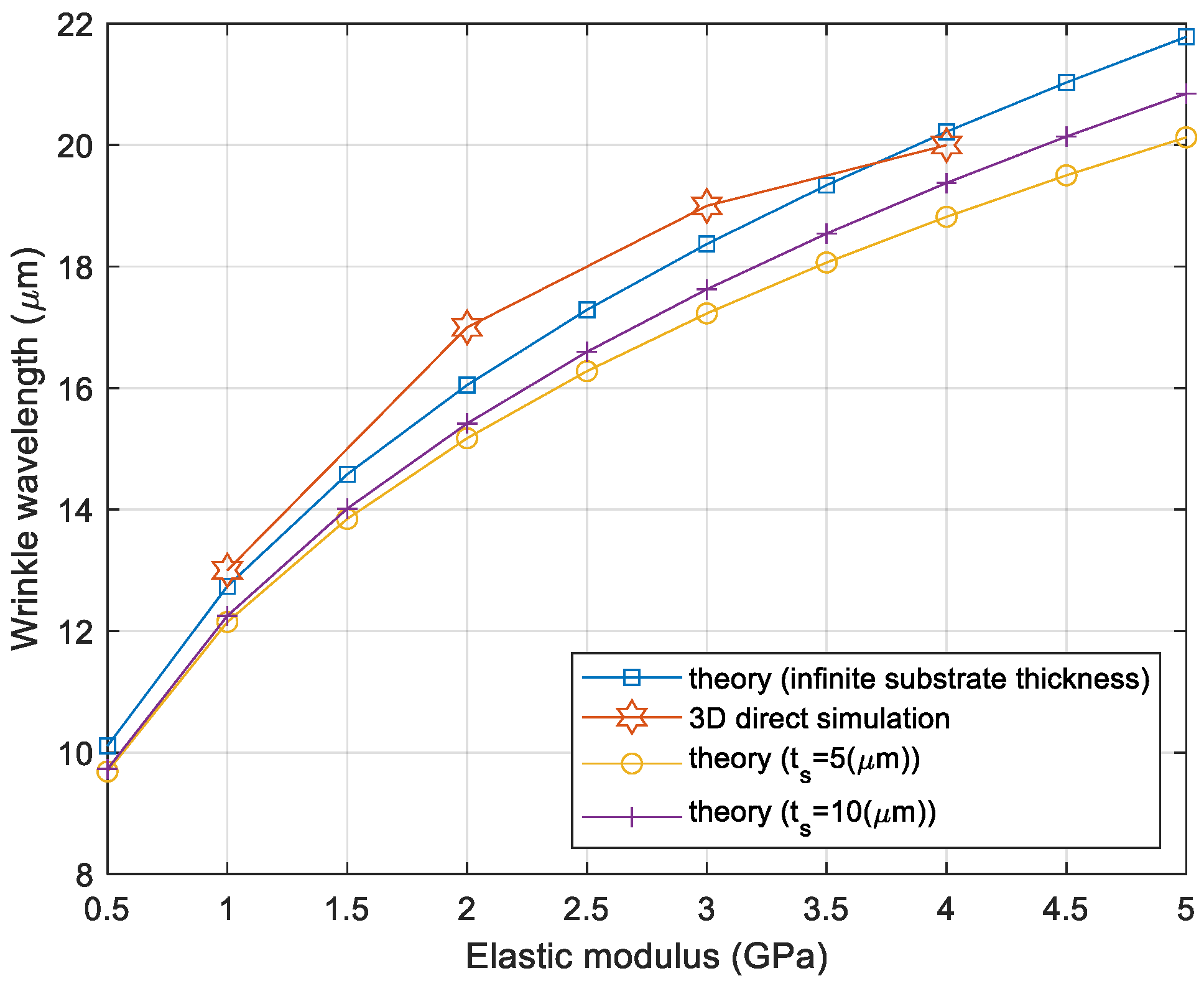
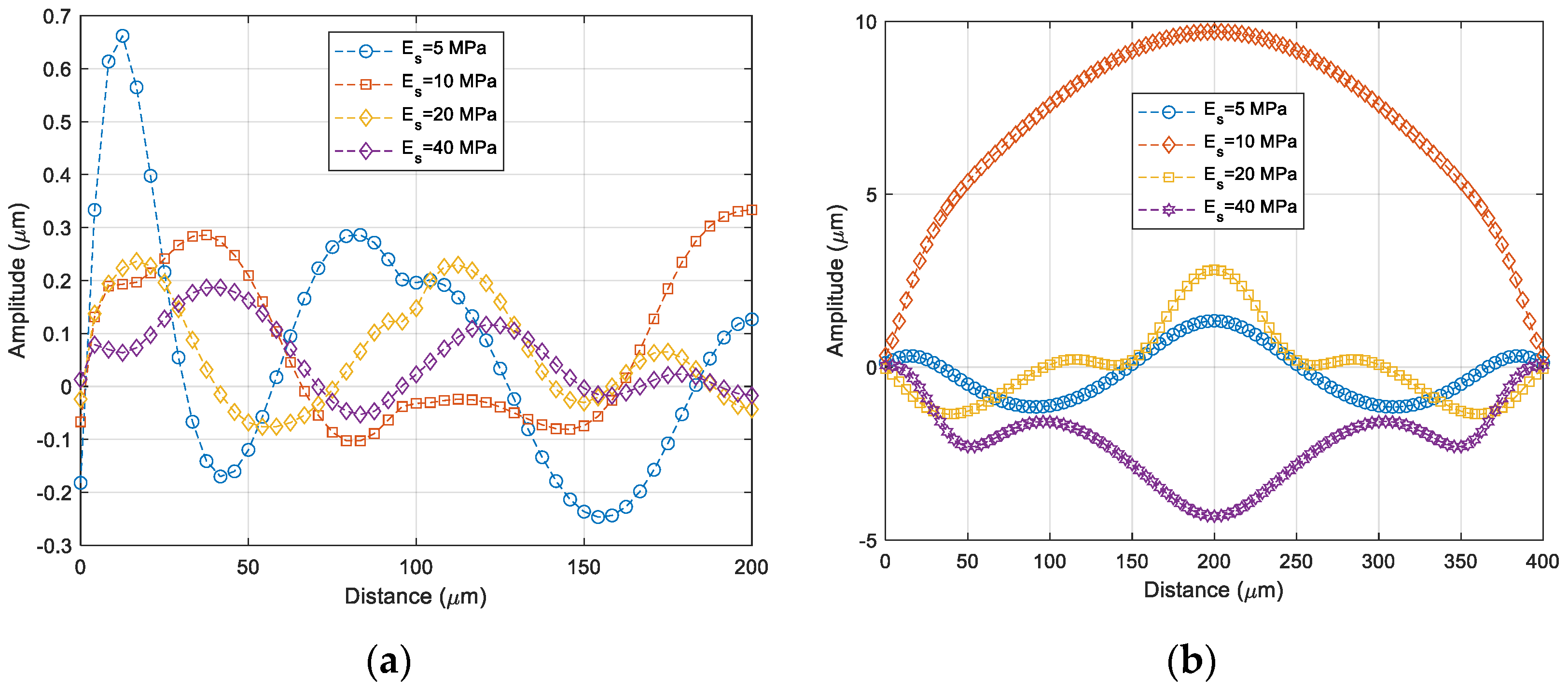
4.2.1. Elasticity Ratio Ef/Es
4.2.2. Applied Strain
5. Conclusions and Perspectives
Funding
Conflicts of Interest
Abbreviations
| BCB | Benzocyclobutene |
| FEM | Finite Element Method |
| CZM | Cohesive Zone Model |
| SAM | Self-Aligned Monolayer |
| MEMS | Microelectromechanical system |
References
- Santagata, F.; Zaal, J.J.M.; Huerta, V.G.; Mele, L.; Creemer, J.F.; Sarro, P.M. Mechanical design and characterization for MEMS thin-film packaging. J. Microelectromech. Syst. 2012, 21, 100–109. [Google Scholar] [CrossRef]
- Guo, B.; Wang, B.; Wen, L.; Helin, P.; Claes, G.; De Coster, J.; Du Bois, B.; Verbist, A.; Van Hoof, R.; Vereecke, G.; et al. Poly-SiGe-based MEMS thin-film encapsulation. J. Microelectromech. Syst. 2012, 21, 100–120. [Google Scholar] [CrossRef]
- Gillot, C.; Lagoutte, E.; Charvet, P.L.; Souchon, F.; Sillon, N. Wafer level thin film encapsulation for MEMS. In Proceedings of the 2005 Conference on High Density Microsystem Design and Packaging and Component Failure Analysis, Shanghai, China, 27–29 June 2005; pp. 1–4. [Google Scholar]
- Brault, S.; Garel, O.; Schelcher, G.; Isac, N.; Parrain, F.; Bosseboeuf, A.; Verjus, F.; Desgeorges, M.; Dufour-Gergam, E. MEMS packaging process by film transfer using an anti-adhesive layer. Microsyst. Technol. 2010, 16, 1277–1284. [Google Scholar] [CrossRef]
- Seok, S.; Kim, J.; Fryziel, M.; Rolland, N.; Grandchamp, B.; Simon, W.; Baggen, R. BCB cap packaging of MEMS switches integrated with 100-μm MMIC wafer. IEEE Trans. Compon. Packag. Manuf. Technol. 2013, 3, 1799–1803. [Google Scholar] [CrossRef]
- Kim, J.-G.; Seok, S.; Rolland, N.; Rolland, P.-A. Polymer-based zero-level packaging technology for high frequency RF applications by wafer bonding/debonding technique using an anti-adhesion layer. Int. J. Precis. Eng. Manuf. 2012, 13, 1861–1867. [Google Scholar] [CrossRef]
- Welch, W.C., III. Vacuum and Hermetic Packaging of MEMS Using Solder. Ph.D. Dissertation, University of Michigan, Ann Arbor, MI, USA, 2008. [Google Scholar]
- Weide, K. Impact of FEM simulation on reliability improvement of packaging. Microelectron. Reliab. 1999, 39, 1079–1088. [Google Scholar] [CrossRef]
- Suk, K.-L.; Lee, S.H.; Kim, J.Y.; Lee, S.W.; Kim, H.J.; Lee, S.C.; Kim, P.W.; Byun, J.S.; Kim, D.-W.; Oh, D. Low Cost Si-less RDL Interposer Package for High Performance Computing Applications. In Proceedings of the 2018 IEEE 68th Electronic Components and Technology Conference (ECTC), San Diego, CA, USA, 29 May–1 June 2018; pp. 64–69. [Google Scholar]
- Li, M.; Torah, R.; Liu, J.; Tudor, J.; Beeby, S. Finite element analysis (FEA) modelling and experimental verification to optimise flexible electronic packaging for e-textiles. Microsyst. Technol. 2022, 28, 1515–1524. [Google Scholar] [CrossRef] [Green Version]
- Walwadkar, S.S.; Cho, J. Evaluation of die stress in MEMS packaging: Experimental and theoretical approaches. IEEE Trans. Compon. Packag. Technol. 2006, 29, 735–742. [Google Scholar] [CrossRef]
- Yang, K.; Im, J.; Heistand, R.H. Significance of coating stress on substrate bow in large area processing of MCM. IEEE Trans. Compon. Packag. Technol. 2001, 24, 33–36. [Google Scholar]
- An, J.E.; Park, U.; Jung, D.G.; Park, C.; Kong, S.H. Die-Attach Structure of Silicon-on-Glass MEMS Devices Considering Asymmetric Packaging Stress and Thermal Stress. Sensors 2019, 19, 3979. [Google Scholar] [CrossRef] [Green Version]
- Seok, S.; Rolland, N.; Rolland, P.-A. A Theoretical and Experimental Study of BCB Thin-Film Cap Zero-Level Package Based on FEM Simulations. J. Micromech. Microeng. 2010, 20, 095010. [Google Scholar] [CrossRef]
- Seok, S. A Theoretical Study on Post-it-like Debonding Process for BCB Cap Transfer Packaging Based on FEM Simulation. IEEE Trans. Compon. Packag. Manuf. Technol. 2015, 5, 1417–1422. [Google Scholar] [CrossRef]
- Yan, Y.; Shang, F. Cohesive zone modeling of interfacial delamination in PZT thin films. Int. J. Solids Struct. 2009, 46, 2739–2749. [Google Scholar] [CrossRef] [Green Version]
- Wei, Y.G.; Hutchinson, J.W. Nonlinear delamination mechanics of thin films. J. Mech. Phys. Solids 1997, 45, 1137–1159. [Google Scholar] [CrossRef] [Green Version]
- Chandra, N.; Li, H.; Shet, C.; Ghonem, H. Some issues in the application of cohesive zone models for metal–ceramic interfaces. Int. J. Solids Struct. 2002, 39, 2827–2855. [Google Scholar] [CrossRef]
- Yin, J.; Chen, X. Buckling patterns of thin films on compliant substrates: The effect of plasticity. J. Phys. D Appl. Phys. 2011, 44, 045401. [Google Scholar] [CrossRef]
- Mei, H.; Landis, C.M.; Huang, R. Concomitant wrinkling and buckle-delamination of elastic thin films on compliant substrates. Mech. Mater. 2011, 43, 627–642. [Google Scholar] [CrossRef]
- Stafford, C.M.; Harrison, C.; Beers, K.L.; Karim, A.; Amis, E.J.; VanLandingham, M.R.; Kim, H.C.; Volksen, W.; Miller, R.D.; Simonyi, E.E. A buckling-based metrology for measuring the elastic moduli of polymeric thin films. Nat. Mater. 2004, 3, 545–550. [Google Scholar] [CrossRef]
- Stafford, C.M.; Harrison, C.; Karim, A.; Amis, E.J. Measuring the modulus of polymer films by strain-induced buckling instabilities. Polym. Prepr. 2002, 43, 1335. [Google Scholar]
- Niinivaara, E.; Desmaisons, J.; Dufresne, A.; Bras, J.; Cranston, E.D. Film thickness limits of a buckling-based method to determine mechanical properties of polymer coatings. J. Colloid Interface Sci. 2021, 582, 227–235. [Google Scholar] [CrossRef]
- Nikravesh, S.; Ryu, D.; Shen, Y.-L. Direct numerical simulation of buckling instability of thin films on a compliant substrate. Adv. Mech. Eng. 2019, 11, 1687814019840470. [Google Scholar] [CrossRef] [Green Version]
- Nikravesh, S.; Ryu, D.; Shen, Y.-L. Instabilities of thin films on a compliant substrate: Direct numerical simulations from surface wrinkling to global buckling. Sci. Rep. 2020, 10, 5728. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nikravesh, S.; Ryu, D.; Shen, Y.-L. Surface Wrinkling versus Global Buckling Instabilities in Thin Film-Substrate Systems under Biaxial Loading: Direct 3D Numerical Simulations. Adv. Theory Simul. 2022, 5, 2200183. [Google Scholar] [CrossRef]
- Seok, S.; Park, H.D.; Kim, J.S. Scotch-tape surface wrinkling based thin-film material properties extraction. J. Micromech. Microeng. 2022, 32, 045002. [Google Scholar] [CrossRef]
- Seok, S. Fabrication and Modeling of Nitride Thin Film Encapsulation Based on Anti-Adhesion-Assisted Transfer Technique and Nitride/BCB Bilayer Wrinkling. IEEE Trans. Compon. Packag. Manuf. Technol. 2016, 6, 1301–1307. [Google Scholar] [CrossRef]
- Chung, J.Y.; Nolte, A.J.; Stafford, C.M. Surface Wrinkling: A Versatile Platform for Measuring Thin-Film Properties. Adv. Mater. 2011, 23, 349–368. [Google Scholar] [CrossRef]
- Yoo, P.J.; Suh, K.Y.; Park, S.Y.; Lee, H.H. Physical Self-Assembly of Microstructures by Anisotropic Buckling. Adv. Mater 2002, 14, 1383–1387. [Google Scholar] [CrossRef]
- Seok, S.; Park, H.; Coste, P.; Kim, J. Direct Numerical Simulation of Surface Wrinkling for Extraction of Thin Metal Film Material Properties. Micromachines 2023, 14, 747. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Part Name | Dimension | Material Properties |
|---|---|---|
| Thin film | 200 µm (L) × 200 µm (W) × 1 µm (H) | Ef = 2 GPa, νf = 0.3 |
| Sealing ring | 200 µm (L) × 25 µm (W) × 25 µm (H) | Es = 5 MPa, νs = 0.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seok, S. FEM Analysis of Buckled Dielectric Thin-Film Packaging Based on 3D Direct Numerical Simulation. Micromachines 2023, 14, 1312. https://doi.org/10.3390/mi14071312
Seok S. FEM Analysis of Buckled Dielectric Thin-Film Packaging Based on 3D Direct Numerical Simulation. Micromachines. 2023; 14(7):1312. https://doi.org/10.3390/mi14071312
Chicago/Turabian StyleSeok, Seonho. 2023. "FEM Analysis of Buckled Dielectric Thin-Film Packaging Based on 3D Direct Numerical Simulation" Micromachines 14, no. 7: 1312. https://doi.org/10.3390/mi14071312
APA StyleSeok, S. (2023). FEM Analysis of Buckled Dielectric Thin-Film Packaging Based on 3D Direct Numerical Simulation. Micromachines, 14(7), 1312. https://doi.org/10.3390/mi14071312