
Parametric Amplification of Acoustically Actuated Micro Beams Using Fringing Electrostatic Fields

Abstract
:1. Introduction
2. Methodology
2.1. Device Architecture
2.2. Model
3. Experiment
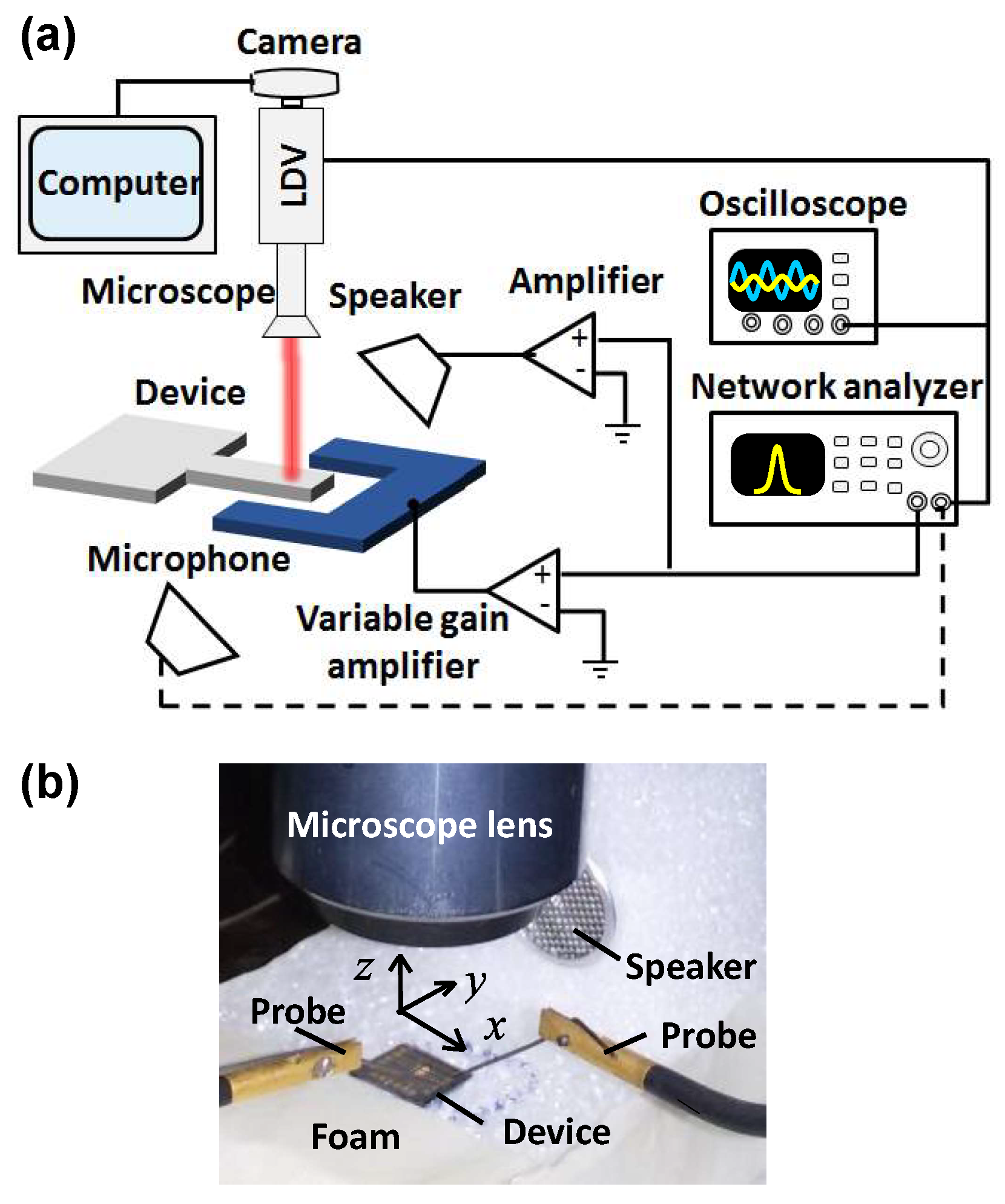
3.1. Experimental Setup
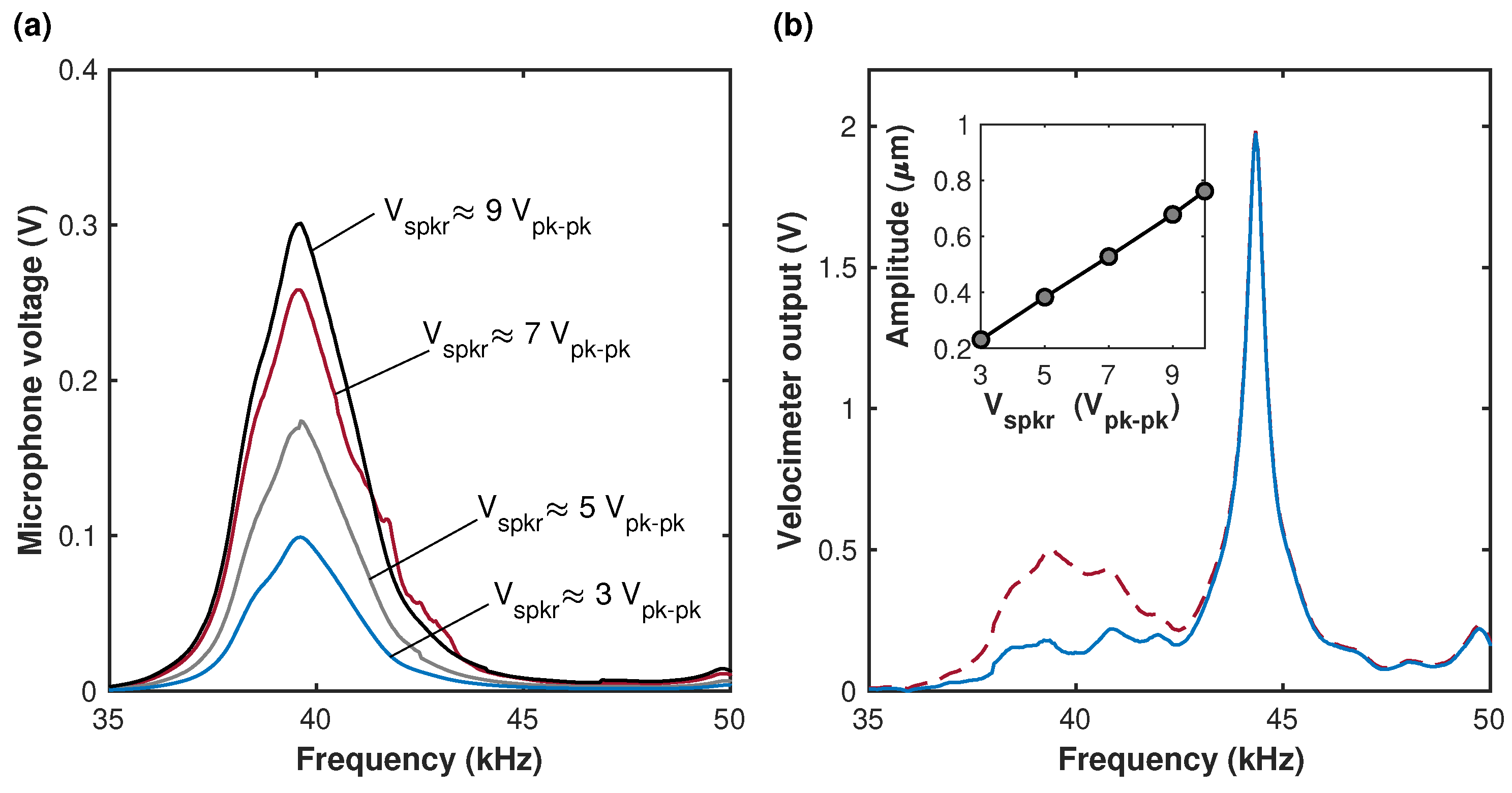
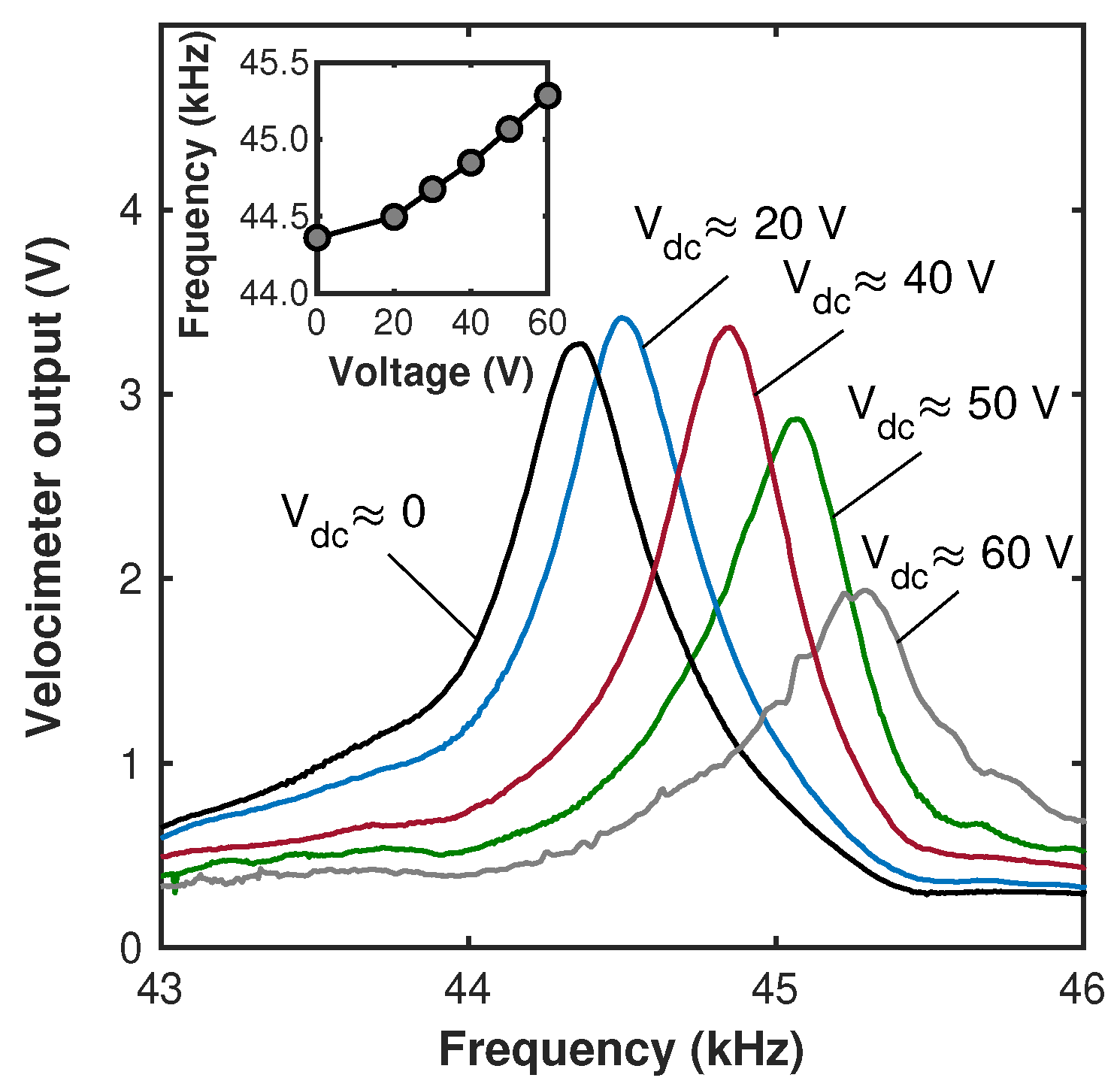
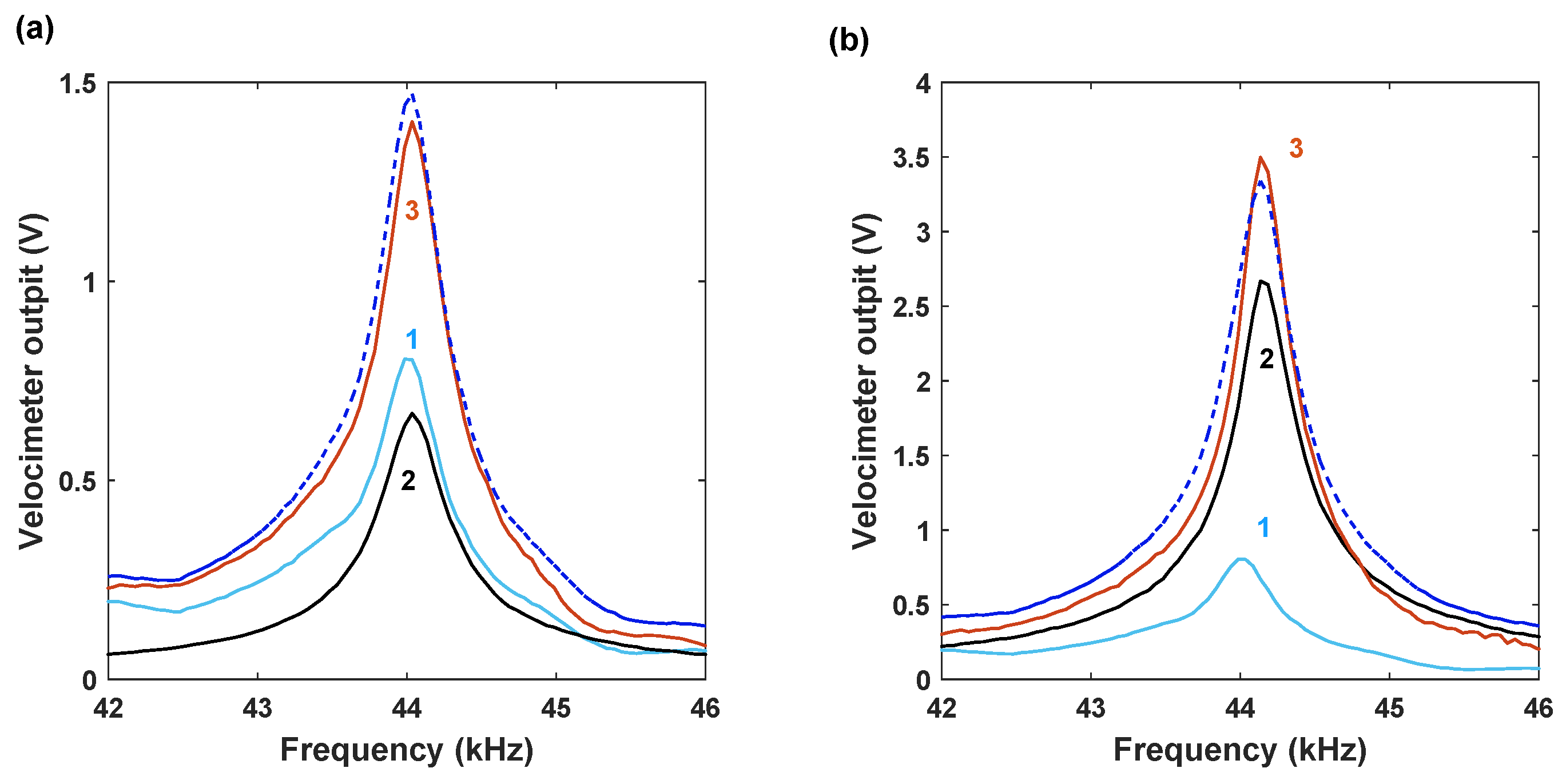
3.2. Experimental Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rugar, D.; Grütter, P. Mechanical parametric amplification and thermomechanical noise squeezing. Phys. Rev. Lett. 1991, 67, 699. [Google Scholar] [CrossRef] [PubMed]
- Karabalin, R.; Masmanidis, S.; Roukes, M. Efficient parametric amplification in high and very high frequency piezoelectric nanoelectromechanical systems. Appl. Phys. Lett. 2010, 97, 183101. [Google Scholar] [CrossRef]
- Rhoads, J.F.; Miller, N.J.; Shaw, S.W.; Feeny, B.F. Mechanical domain parametric amplification. J. Vib. Acoust. 2008, 130, 061006. [Google Scholar] [CrossRef]
- Carr, D.W.; Evoy, S.; Sekaric, L.; Craighead, H.; Parpia, J. Parametric amplification in a torsional microresonator. Appl. Phys. Lett. 2000, 77, 1545–1547. [Google Scholar] [CrossRef]
- Zhang, W.; Baskaran, R.; Turner, K.L. Effect of cubic nonlinearity on auto-parametrically amplified resonant MEMS mass sensor. Sens. Actuators A Phys. 2002, 102, 139–150. [Google Scholar] [CrossRef]
- Rhoads, J.F.; Shaw, S.W.; Turner, K.L. Nonlinear Dynamics and Its Applications in Micro- and Nanoresonators. J. Dyn. Syst. Meas. Control. 2010, 132, 034001. [Google Scholar] [CrossRef]
- Rhoads, J.F.; Kumar, V.; Shaw, S.W.; Turner, K.L. The non-linear dynamics of electromagnetically actuated microbeam resonators with purely parametric excitations. Int. J.-Non-Linear Mech. 2013, 55, 79–89. [Google Scholar] [CrossRef]
- Barakat, A.A.; Hagedorn, P. Broadband parametric amplification for micro-ring gyroscopes. Sens. Actuators A Phys. 2021, 332, 113130. [Google Scholar] [CrossRef]
- Pribošek, J.; Eder, M. Parametric amplification of a resonant MEMS mirror with all-piezoelectric excitation. Appl. Phys. Lett. 2022, 120, 244103. [Google Scholar] [CrossRef]
- Bousse, N.E.; Miller, J.M.; Vukasin, G.D.; Kwon, H.K.; Shaw, S.W.; Kenny, T.W. Tuning Frequency Stability in Micromechanical Resonators with Parametric Pumping. In Proceedings of the 35th IEEE Micro Electro Mechanical Systems (MEMS), Tokyo, Japan, 9–13 January 2022; IEEE: Piscataway, NJ, USA, 2022; Volume 2022, pp. 987–990. [Google Scholar]
- Mohammadi, Z.; Heugel, T.L.; Miller, J.M.; Shin, D.D.; Kwon, H.K.; Kenny, T.W.; Chitra, R.; Zilberberg, O.; Villanueva, L.G. On the effect of linear feedback and parametric pumping on a resonator’s frequency stability. New J. Phys. 2020, 22, 093049. [Google Scholar] [CrossRef]
- Rhoads, J.F.; Shaw, S.W. The impact of nonlinearity on degenerate parametric amplifiers. Appl. Phys. Lett. 2010, 96, 234101. [Google Scholar] [CrossRef]
- Kumar, V.; Miller, J.K.; Rhoads, J.F. Nonlinear parametric amplification and attenuation in a base-excited cantilever beam. J. Sound Vib. 2011, 330, 5401–5409. [Google Scholar] [CrossRef]
- Li, L.; Liu, H.; Li, D.; Zhang, W. Theoretical analysis and experiment of multi-modal coupled vibration of piezo-driven Π-shaped resonator. Mech. Syst. Signal Process. 2023, 192, 110223. [Google Scholar] [CrossRef]
- Shmulevich, S.; Elata, D. A MEMS Implementation of the Classic Meissner Parametric Resonator: Exploring High-Order Windows of Unbounded Response. J. Microelectromechanical Syst. 2017, 26, 325–332. [Google Scholar] [CrossRef]
- Kassie, D.; Elata, D. Parametric Resonators with a Floating Rotor: Sensing Strategy for Devices with an Increased Stiffness and Compact Design. J. Microelectromechanical Syst. 2021, 30, 411–418. [Google Scholar] [CrossRef]
- Scheeper, P.; Van der Donk, A.; Olthuis, W.; Bergveld, P. A review of silicon microphones. Sens. Actuators A Phys. 1994, 44, 1–11. [Google Scholar] [CrossRef]
- Weigold, J.; Brosnihan, T.; Bergeron, J.; Zhang, X. A MEMS Condenser Microphone for Consumer Applications. In Proceedings of the 19th IEEE Conference on Micro Electro Mechanical Systems (MEMS), Istanbul, Turkey, 22–26 January 2006; IEEE: Piscataway, NJ, USA, 2006; Volume 2006, pp. 86–89. [Google Scholar]
- Chan, C.K.; Lai, W.C.; Wu, M.; Wang, M.Y.; Fang, W. Design and implementation of a capacitive-type microphone with rigid diaphragm and flexible spring using the two poly silicon micromachining processes. IEEE Sens. J. 2011, 11, 2365–2371. [Google Scholar] [CrossRef]
- Lhermet, H.; Verdot, T.; Berthelot, A.; Desloges, B.; Souchon, F. First microphones based on an in-plane deflecting micro-diaphragm and piezoresistive nano-gauges. In Proceedings of the 2018 IEEE Conference on Micro Electro Mechanical Systems (MEMS), Belfast, UK, 21–25 January 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 249–252. [Google Scholar]
- Brenner, K.; Ergun, A.S.; Firouzi, K.; Rasmussen, M.F.; Stedman, Q.; Khuri-Yakub, B. Advances in capacitive micromachined ultrasonic transducers. Micromachines 2019, 10, 152. [Google Scholar] [CrossRef]
- Ozdogan, M.; Towfighian, S.; Miles, R.N. Modeling and Characterization of a Pull-in Free MEMS Microphone. IEEE Sens. J. 2020, 20, 6314–6323. [Google Scholar] [CrossRef]
- Kaiser, B.; Langa, S.; Ehrig, L.; Stolz, M.; Schenk, H.; Conrad, H.; Schenk, H.; Schimmanz, K.; Schuffenhauer, D. Concept and proof for an all-silicon MEMS micro speaker utilizing air chambers. Microsystems Nanoeng. 2019, 5, 43. [Google Scholar] [CrossRef]
- Miles, R.N.; Cui, W.; Su, Q.T.; Homentcovschi, D. A MEMS low-noise sound pressure gradient microphone with capacitive sensing. J. Microelectromechanical Syst. 2014, 24, 241–248. [Google Scholar] [CrossRef]
- Mackie, D.J.; Jackson, J.C.; Brown, J.G.; Uttamchandani, D.; Windmill, J.F.C. Directional acoustic response of a silicon disc-based microelectromechanical systems structure. Micro Nano Lett. 2014, 9, 276–279. [Google Scholar] [CrossRef]
- Chowdhury, S.; Ahmadi, M.; Miller, W. Design of a MEMS acoustical beamforming sensor microarray. IEEE Sens. J. 2002, 2, 617–627. [Google Scholar] [CrossRef]
- Krijnen, G.; Dijkstra, M.; Van Baar, J.; Shankar, S.; Kuipers, W.; De Boer, R.; Altpeter, D.; Lammerink, T.; Wiegerink, R. MEMS based hair flow-sensors as model systems for acoustic perception studies. Nanotechnology 2006, 17, S84–S89. [Google Scholar] [CrossRef]
- Wilmott, D.; Alves, F.; Karunasiri, G. Bio-Inspired Miniature Direction Finding Acoustic Sensor. Sci. Rep. 2016, 6, 29957. [Google Scholar] [CrossRef] [PubMed]
- Rahaman, A.; Kim, B. Fly-Inspired MEMS Directional Acoustic Sensor for Sound Source Direction. In Proceedings of the TRANSDUCERS 2019 and EUROSENSORS XXXIII, Berlin, Germany, 23–27 June 2019; pp. 905–908. [Google Scholar]
- Dean, R.N.; Castro, S.T.; Flowers, G.T.; Roth, G.; Ahmed, A.; Hodel, A.S.; Grantham, B.E.; Bittle, D.A.; Brunsch, J.P. A characterization of the performance of a MEMS gyroscope in acoustically harsh environments. IEEE Trans. Ind. Electron. 2010, 58, 2591–2596. [Google Scholar] [CrossRef]
- Perl, T.; Maimon, R.; Krylov, S.; Shimkin, N. Control of Vibratory MEMS Gyroscope with the Drive Mode Excited through Parametric Resonance. J. Vib. Acoust. Trans. ASME 2021, 143, 051013. [Google Scholar] [CrossRef]
- Ahmida, K.M.; Ferreira, L.O.S. Design and modeling of an acoustically excited double-paddle scanner. J. Micromechanics Microengineering 2004, 14, 1337. [Google Scholar] [CrossRef]
- Cetinkaya, C.; Ban, L.; Subramanian, G.; Akseli, I. Multimode air-coupled excitation of micromechanical structures. IEEE Trans. Instrum. Meas. 2008, 57, 2457–2461. [Google Scholar] [CrossRef]
- Latif, I.; Toda, M.; Ono, T. Acoustic Amplification Using Characteristic Geometry-Based Integrated Platforms for Micromechanical Resonant Detection. In Proceedings of the 33th IEEE Conference on Micro Electro Mechanical Systems (MEMS), Vancouver, BC, Canada, 18–22 January 2020; IEEE: Piscataway, NJ, USA, 2020; Volume 2020, pp. 834–837. [Google Scholar]
- Linzon, Y.; Ilic, B.; Lulinsky, S.; Krylov, S. Efficient parametric excitation of silicon-on-insulator microcantilever beams by fringing electrostatic fields. J. Appl. Phys. 2013, 113, 163508. [Google Scholar] [CrossRef]
- Krakover, N.; Ilic, B.; Krylov, S. Micromechanical resonant cantilever sensors actuated by fringing electrostatic fields. J. Micromechanics Microengineering 2022, 32, 054001. [Google Scholar] [CrossRef]
- Krylov, S.; Ilic, B.R.; Lulinsky, S. Bistability of curved microbeams actuated by fringing electrostatic fields. Nonlinear Dyn. 2011, 66, 403. [Google Scholar] [CrossRef]
- Rand, R.H. Lecture Notes on Nonlinear Vibrations; Cornell University Library: Ithaca, NY, USA, 2005; Volume 52. [Google Scholar]
- Halevy, O.; Benjamin, E.B.; Kessler, Y.; Krylov, S. Resonant Sensing Element Realized as a Single Crystal Si Cantilever Actuated by Fringing Electrostatic Fields. IEEE Sens. J. 2021, 21, 10454–10464. [Google Scholar] [CrossRef]
- Geva-Sagiv, M.; Las, L.; Yovel, Y.; Ulanovsky, N. Spatial cognition in bats and rats: From sensory acquisition to multiscale maps and navigation. Nat. Rev. Neurosci. 2015, 16, 94–108. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Nominal | Measured |
|---|---|---|
| Length of the beam L | 300 | ≈296.13 |
| Width of the beam b | 16 | ≈15.13 |
| Thickness of the beam d | 3 | - |
| Distance to electrode | 5 | ≈5.61 |
| Length of the electrode | 100 | ≈97.27 |
| Notations | Parameter |
|---|---|
| Deflection | |
| Time | |
| Frequency | |
| Voltage parameter |
| Parameter | Value |
|---|---|
| Density (kg/) | 2300 |
| Young’s modulus E (GPa) | 169 |
| Modal electrostatic force parameter s | |
| Modal mass m | |
| Modal coeff. of the acoustic force | |
| Electrostatic force fitting parameter a | |
| Electrostatic force fitting parameter | |
| Electrostatic force fitting parameter p |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lulinsky, S.; Torteman, B.; Ilic, B.R.; Krylov, S. Parametric Amplification of Acoustically Actuated Micro Beams Using Fringing Electrostatic Fields. Micromachines 2024, 15, 257. https://doi.org/10.3390/mi15020257
Lulinsky S, Torteman B, Ilic BR, Krylov S. Parametric Amplification of Acoustically Actuated Micro Beams Using Fringing Electrostatic Fields. Micromachines. 2024; 15(2):257. https://doi.org/10.3390/mi15020257
Chicago/Turabian StyleLulinsky, Stella, Ben Torteman, Bojan R. Ilic, and Slava Krylov. 2024. "Parametric Amplification of Acoustically Actuated Micro Beams Using Fringing Electrostatic Fields" Micromachines 15, no. 2: 257. https://doi.org/10.3390/mi15020257
APA StyleLulinsky, S., Torteman, B., Ilic, B. R., & Krylov, S. (2024). Parametric Amplification of Acoustically Actuated Micro Beams Using Fringing Electrostatic Fields. Micromachines, 15(2), 257. https://doi.org/10.3390/mi15020257