
Automotive Augmented Reality Head-Up Displays




Abstract
:1. Introduction to Heads-Up Displays (HUDs)
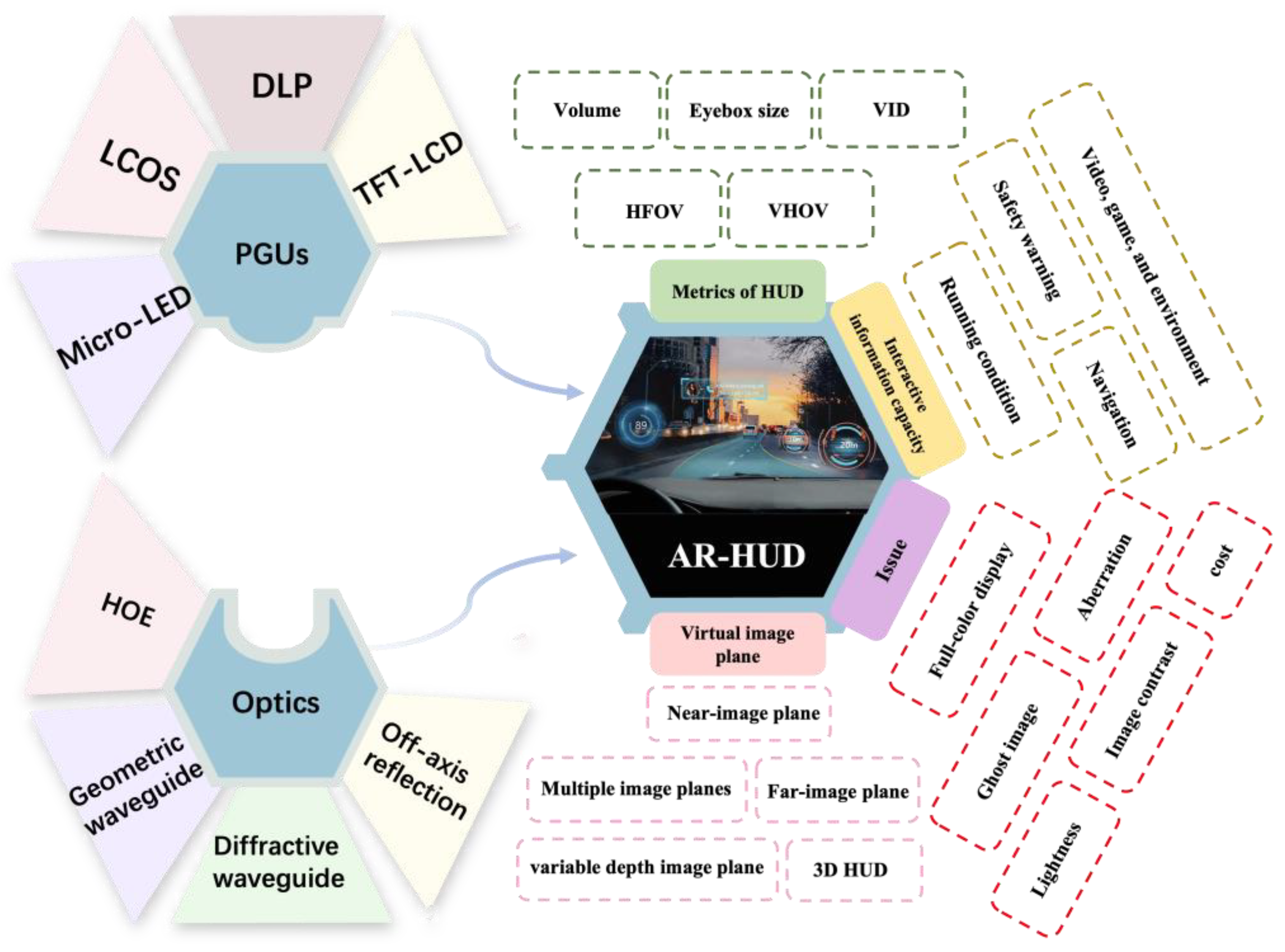
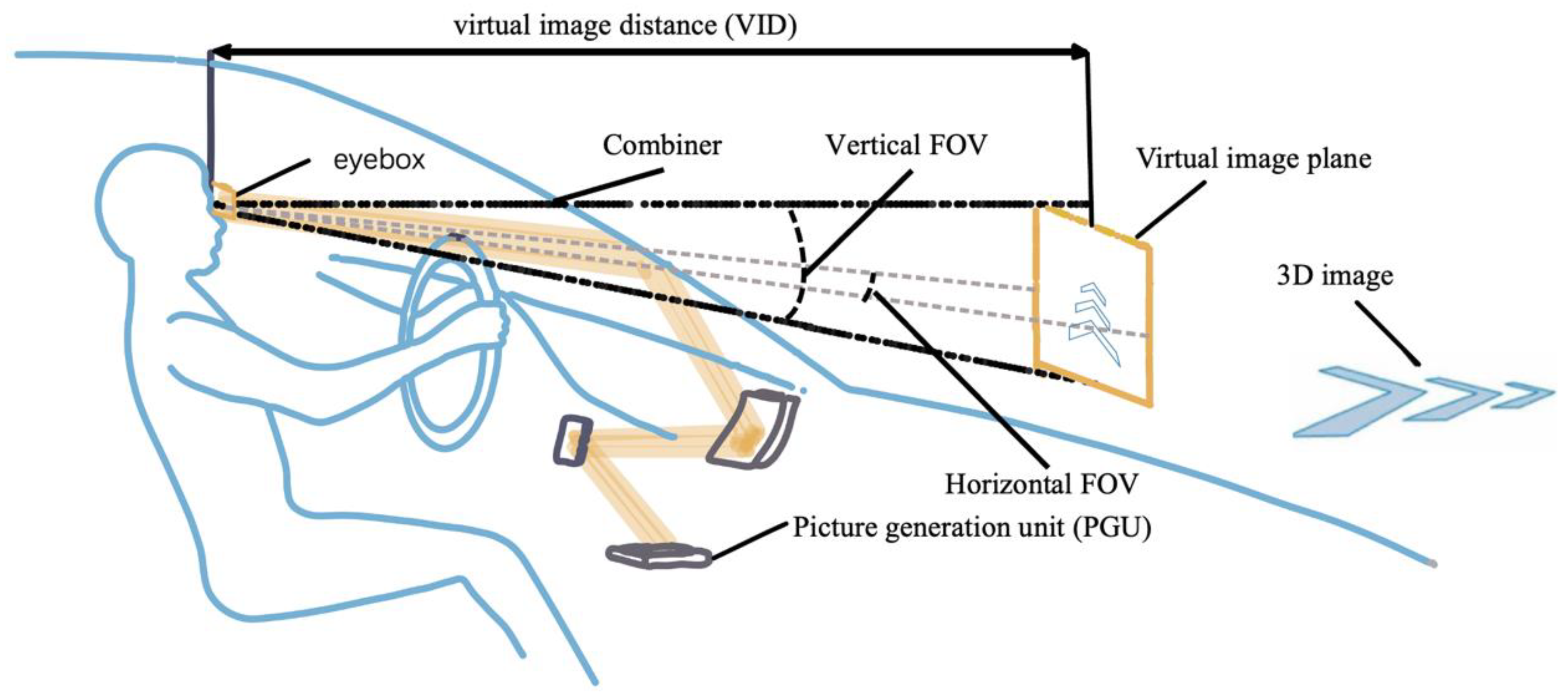
2. Metrics of HUDs
3. Picture Generation Unit for HUDs
4. Optics for HUDs
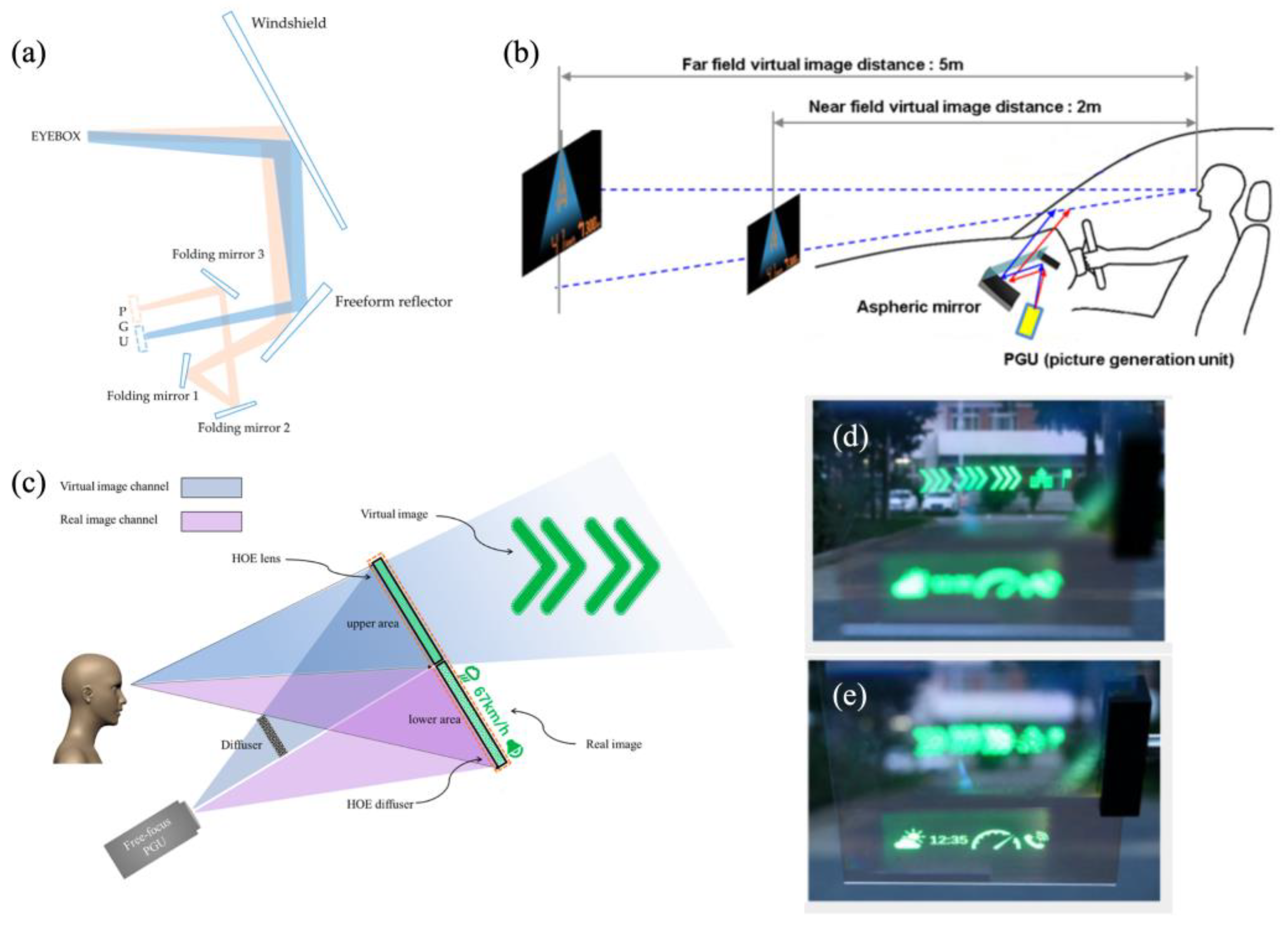
4.1. Virtual Image Distance within 10 m
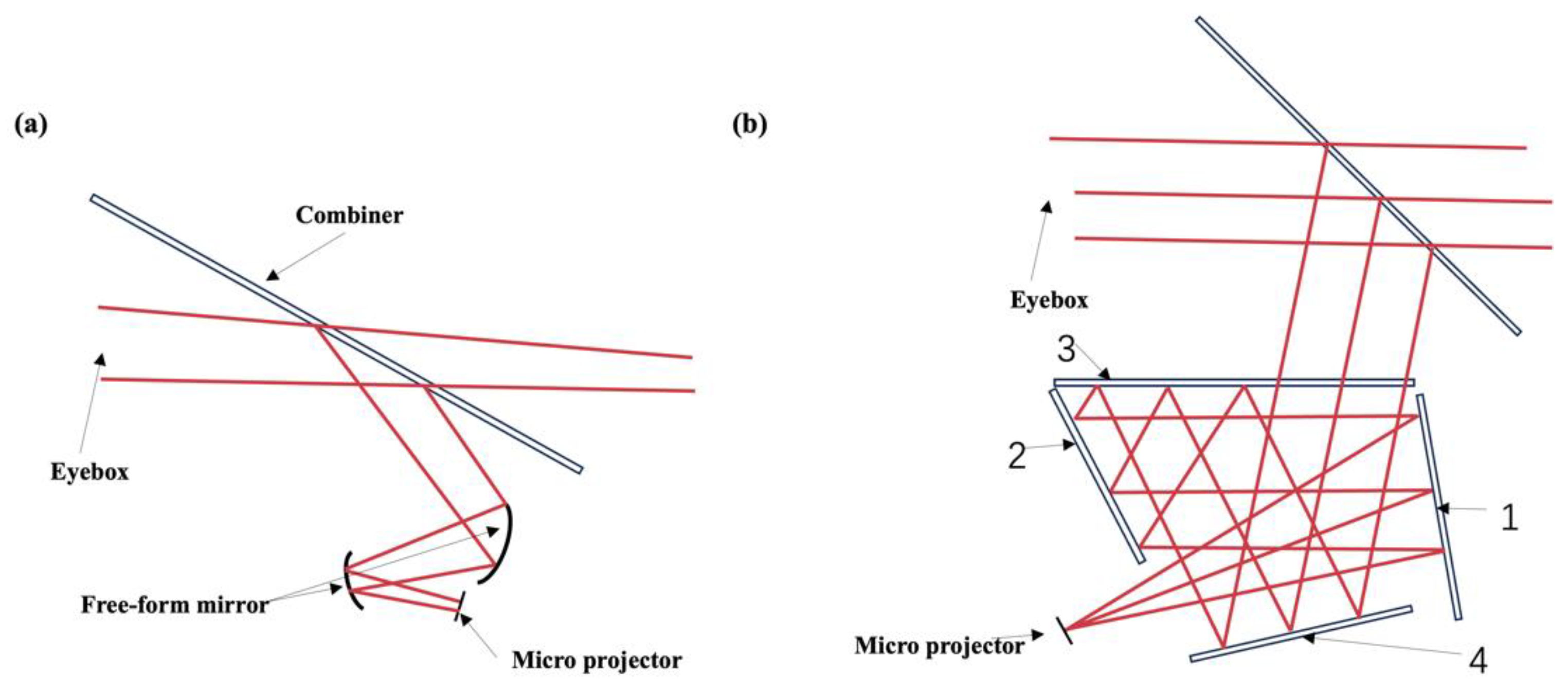
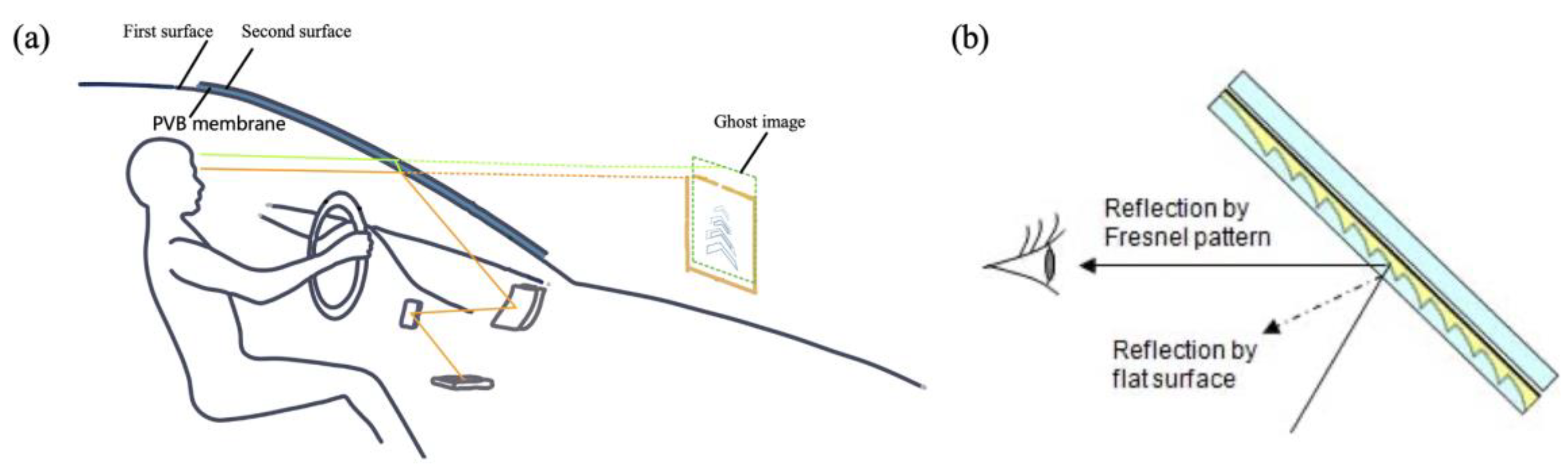
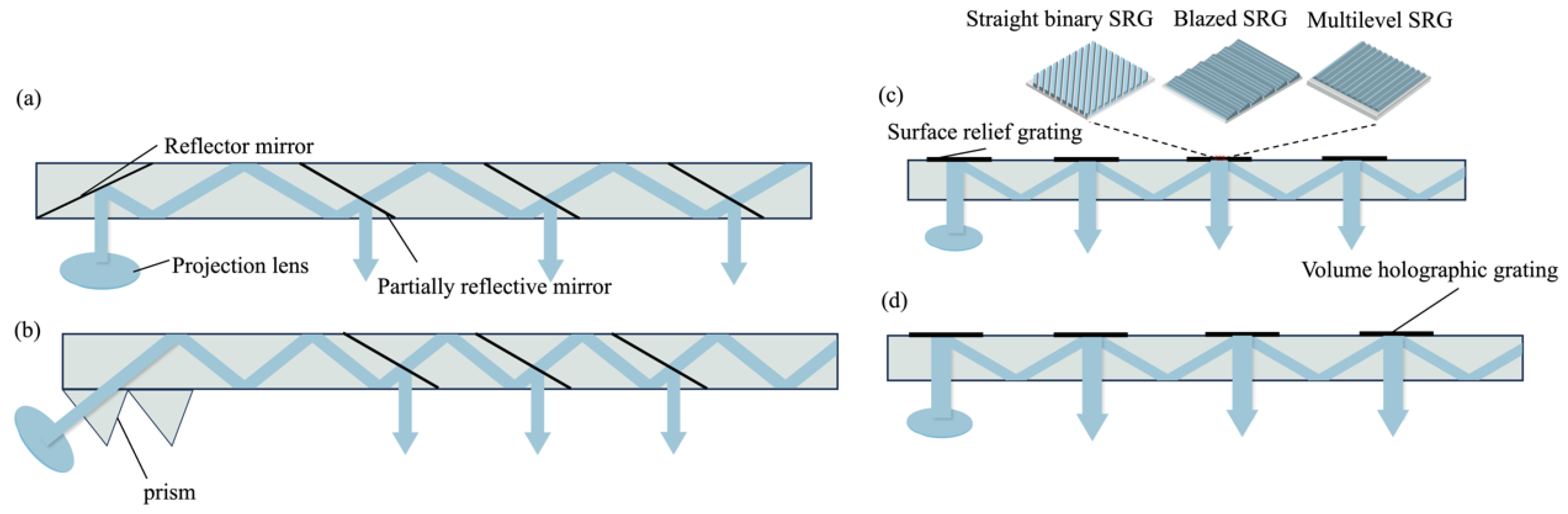
4.2. VID Larger Than 10 m
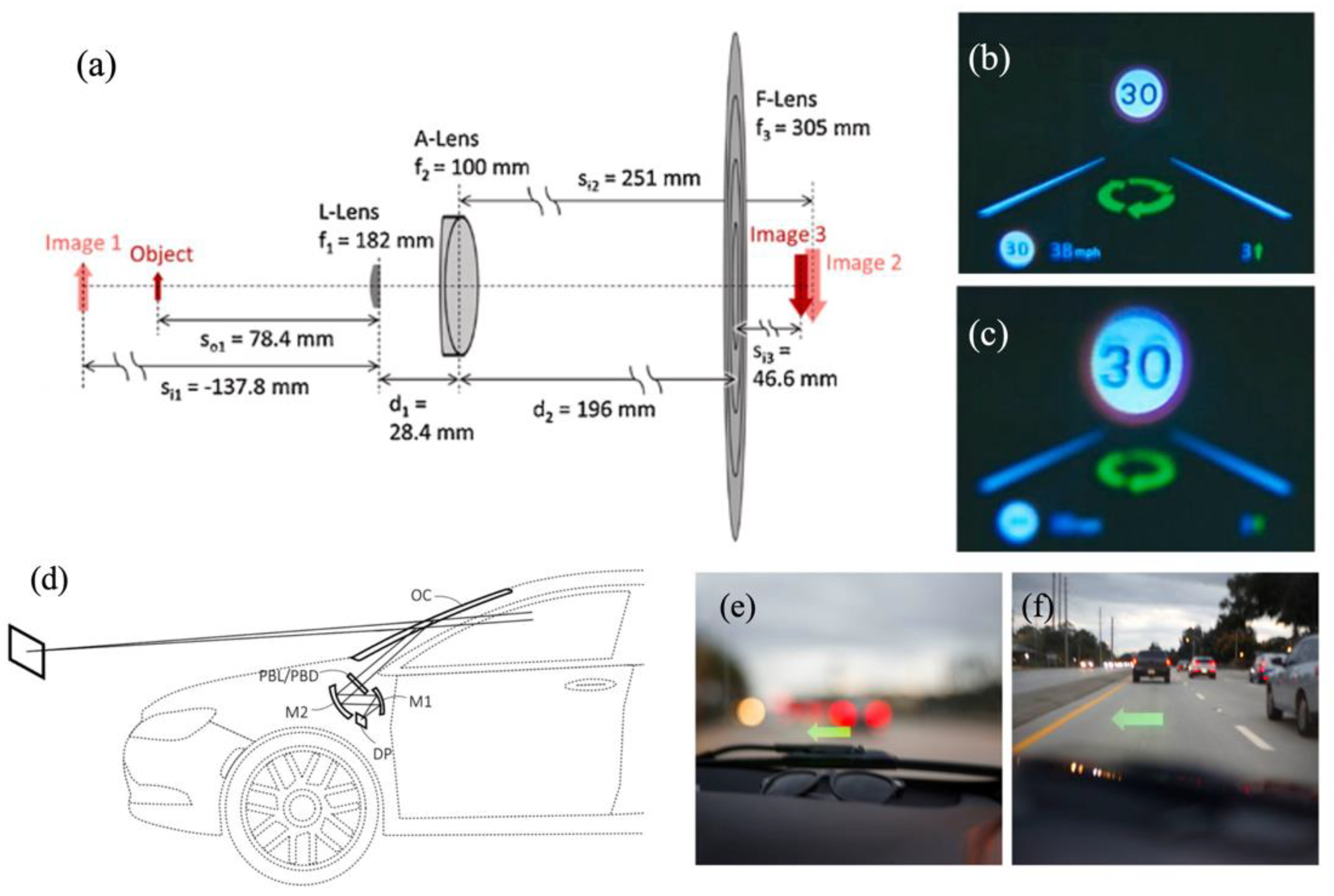
4.3. Multi-Image Distance

4.4. Variable Image Distance
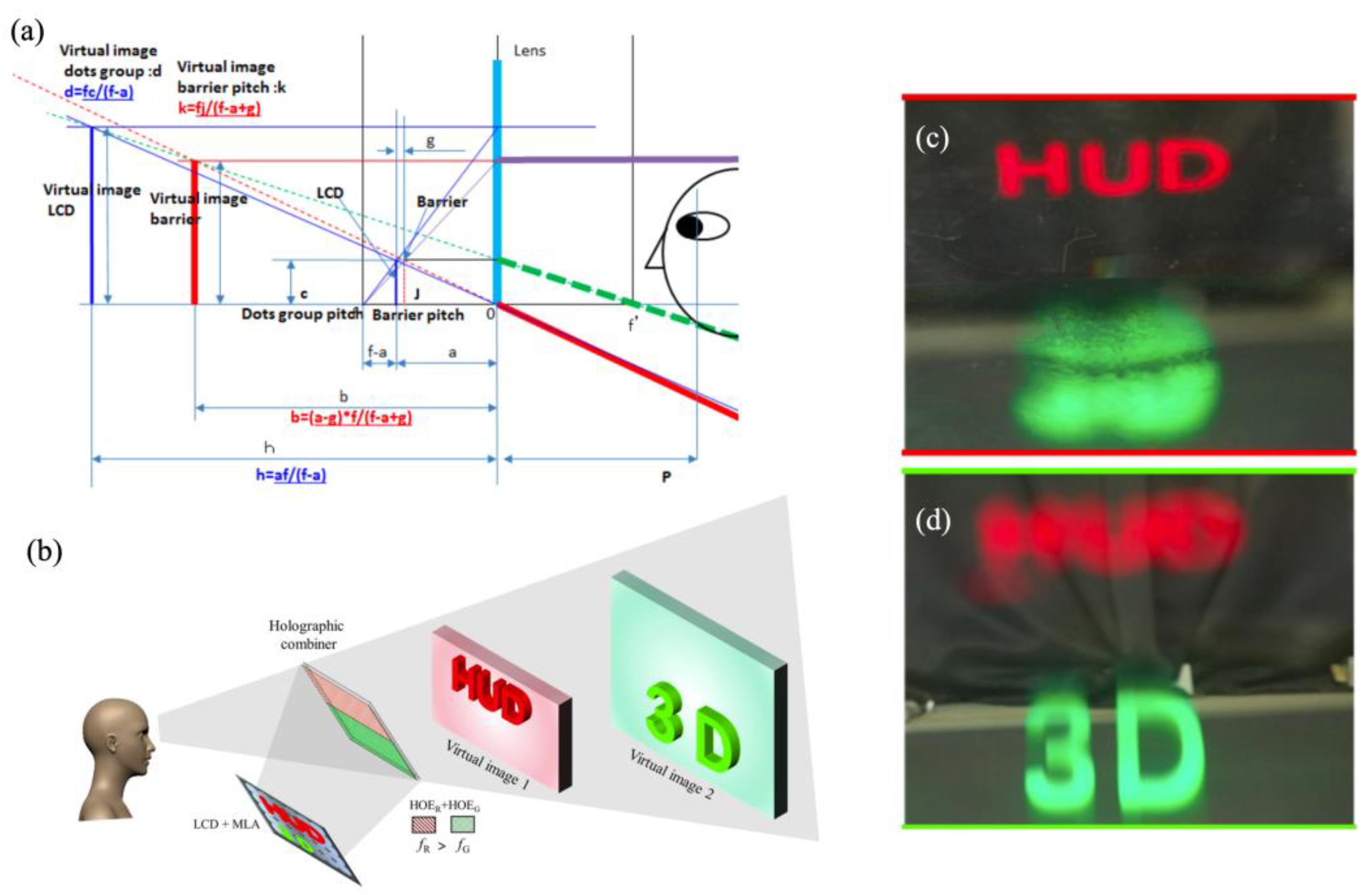
4.5. Three-Dimensional HUDs
5. Conclusions and Outlook
Funding
Conflicts of Interest
References
- Available online: https://www.who.int/data/gho/data/themes/mortality-and-global-health-estimates/global-health-estimates-leading-causes-of-dalys (accessed on 1 January 2020).
- Available online: https://www.who.int/news-room/fact-sheets/detail/road-traffic-injuries (accessed on 1 January 2019).
- Kuhnert, F.; Sturmer, C.; Koster, A. Five Trends Transforming the Automotive Industry; Pricewaterhouse Coopers GmbH: Berlin, Germany, 2018. [Google Scholar]
- Wang, Z.; Wu, Y.; Niu, Q. Multi-Sensor Fusion in Automated Driving: A Survey. IEEE Access 2020, 8, 2847–2868. [Google Scholar] [CrossRef]
- Klauer, S.G.; Dingus, T.A.; Le, T.V. The Impact of Driver Inattention on Near-Crash/Crash Risk: An Analysis Using the 100-Car Naturalistic Driving Study Data; U.S. Department of Transportation: Washington, DC, USA, 2006.
- Lee, V.K.; Champagne, C.R.; Francescutti, L.H. Fatal distraction: Cell phone use while driving. Can. Fam. Physician 2013, 59, 723–725. [Google Scholar] [PubMed]
- Shen, C.Y.; Cheng, Y.; Huang, S.H.; Huang, Y.P. Presented at SID Symposium Digest of Technical Papers. In Book 3: Display Systems Posters: AR/VR/MR; SID: San Jose, CA, USA, 2019. [Google Scholar]
- Crawford, J.; Neal, A. A review of the perceptual and cognitive issues associated with the use of head-up displays in commercial aviation. Int. J. Aviat. Psychol. 2006, 16, 1–19. [Google Scholar] [CrossRef]
- Bast, H.; Delling, D.; Goldberg, A. Route planning in transportation networks. In Algorithm Engineering: Selected Results and Surveys; Springer: Berlin/Heidelberg, Germany, 2016; pp. 19–80. [Google Scholar]
- Skrypchuk, L.; Mouzakitis, A.; Langdon, P.M.; Clarkson, P.J. The effect of age and gender on task performance in the automobile. In Breaking Down Barriers: Usability, Accessibility and Inclusive Design; Springer International Publishing: Berlin/Heidelberg, Germany, 2018; pp. 17–27. [Google Scholar]
- Štrumbelj, E.; Kononenko, I. Explaining Prediction Models and Individual Predictions with Feature Contributions. Knowl. Inf. Syst. 2014, 41, 647–665. [Google Scholar] [CrossRef]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Skirnewskaja, J.; Wilkinson, T.D. Automotive Holographic Head-Up Displays. Adv. Mater. 2022, 34, 2110463. [Google Scholar] [CrossRef] [PubMed]
- Cai, J.H. Research on Diffraction Head-Up Display Technology; Nanjing University of Technology: Nanjing, China, 2013. [Google Scholar]
- Chen, X.W.; Cao, Y.; Xue, J.L. Optimal design of optical module of the head-up display system with two free-form surfaces. Prog. Laser Optoelectron. 2022, 59, 1722004. [Google Scholar]
- Blankenbach, K. Requirements and System Aspects of AR-Head-Up Displays. IEEE Consum. Electron. Mag. 2019, 8, 62–67. [Google Scholar] [CrossRef]
- Ou, G.H. Design and Research of Optical System for Vehicle Augmented Reality Head-Up Display; University of Chinese Academy of Sciences: Beijing, China, 2019. [Google Scholar]
- Draper, C.T.; Bigler, C.M.; Mann, M.S.; Sarma, K.; Blanche, P.-A. Holographic Waveguide Head-up Display with 2-D Pupil Expansion and Longitudinal Image Magnification. Appl. Opt. 2019, 58, A251. [Google Scholar] [CrossRef] [PubMed]
- Cao, Y. Optimal Design of Optical Module of Vehicular Head-Up Display System; Xi’an University of Technology: Xi’an, China, 2022. [Google Scholar]
- Singh, I.; Kumar, A.; Singh, H.S.; Nijhawan, O.P. Optical Design and Performance Evaluation of a Dual-Beam Combiner Head-up Display. Opt. Eng. 1996, 35, 813–818. [Google Scholar] [CrossRef]
- Park, H.S.; Park, M.W.; Won, K.H.; Kim, K.; Jung, S.K. In-Vehicle AR-HUD System to Provide Driving-Safety Information. ETRI J. 2013, 35, 1038–1047. [Google Scholar] [CrossRef]
- Qin, Z.; Lin, F.-C.; Huang, Y.-P.; Shieh, H.-P.D. Maximal Acceptable Ghost Images for Designing a Legible Windshield-Type Vehicle Head-Up Display. IEEE Photonics J. 2017, 9, 1–12. [Google Scholar] [CrossRef]
- Available online: https://www.adayome.com/product/57.html (accessed on 1 January 2020).
- Available online: https://www.adayome.com/product/58.html (accessed on 1 January 2020).
- Available online: https://www.adayome.com/product/59.html (accessed on 1 January 2020).
- Shim, G.W.; Hong, W.; Cha, J.; Park, J.H.; Lee, K.J.; Choi, S. TFT Channel Materials for Display Applications: From Amorphous Silicon to Transition Metal Dichalcogenides. Adv. Mater. 2020, 32, 1907166. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Mao, Q.; Yin, J.; Wang, Y.; Fu, J.; Huang, Y. Theoretical Prediction and Experimental Validation of the Digital Light Processing (DLP) Working Curve for Photocurable Materials. Addit. Manuf. 2021, 37, 101716. [Google Scholar] [CrossRef]
- Zhang, Z.; You, Z.; Chu, D. Fundamentals of Phase-Only Liquid Crystal on Silicon (LCOS) Devices. Light Sci. Appl. 2014, 3, e213. [Google Scholar] [CrossRef]
- Wakunami, K.; Hsieh, P.-Y.; Oi, R.; Senoh, T.; Sasaki, H.; Ichihashi, Y.; Okui, M.; Huang, Y.-P.; Yamamoto, K. Projection-Type See-through Holographic Three-Dimensional Display. Nat. Commun. 2016, 7, 12954. [Google Scholar] [CrossRef] [PubMed]
- Stephen, M.J.; Straley, J.P. Physics of Liquid Crystals. Rev. Mod. Phys. 1974, 46, 617–704. [Google Scholar] [CrossRef]
- Oh, J.-H.; Kwak, S.-Y.; Yang, S.-C.; Bae, B.-S. Highly Condensed Fluorinated Methacrylate Hybrid Material for Transparent Low- k Passivation Layer in LCD-TFT. ACS Appl. Mater. Interfaces 2010, 2, 913–918. [Google Scholar] [CrossRef]
- Gabor, D. A New Microscopi Prinnciple. Nature 1948, 161, 777–778. [Google Scholar] [CrossRef] [PubMed]
- Anwar, A.R.; Sajjad, M.T.; Johar, M.A.; Hernández-Gutiérrez, C.A.; Usman, M.; Łepkowski, S.P. Recent Progress in Micro-LED-Based Display Technologies. Laser Photonics Rev. 2022, 16, 2100427. [Google Scholar] [CrossRef]
- Li, L.; Tang, G.; Shi, Z.; Ding, H.; Liu, C.; Cheng, D.; Zhang, Q.; Yin, L.; Yao, Z.; Duan, L.; et al. Transfer-Printed, Tandem Microscale Light-Emitting Diodes for Full-Color Displays. Proc. Natl. Acad. Sci. USA 2021, 118, e2023436118. [Google Scholar] [CrossRef]
- Mun, S.; Kang, C.; Min, J.; Choi, S.; Jeong, W.; Kim, G.; Lee, J.; Kim, K.; Ko, H.C.; Lee, D. Highly Efficient Full-Color Inorganic LEDs on a Single Wafer by Using Multiple Adhesive Bonding. Adv. Mater. Interfaces 2021, 8, 2100300. [Google Scholar] [CrossRef]
- Hyun, B.-R.; Sher, C.-W.; Chang, Y.-W.; Lin, Y.; Liu, Z.; Kuo, H.-C. Dual Role of Quantum Dots as Color Conversion Layer and Suppression of Input Light for Full-Color Micro-LED Displays. J. Phys. Chem. Lett. 2021, 12, 6946–6954. [Google Scholar] [CrossRef]
- Luo, J.-W.; Wang, Y.-S.; Hu, T.-C.; Tsai, S.-Y.; Tsai, Y.-T.; Wang, H.-C.; Chen, F.-H.; Lee, Y.-C.; Tsai, T.-L.; Chung, R.-J.; et al. Microfluidic Synthesis of CsPbBr3/Cs4PbBr6 Nanocrystals for Inkjet Printing of Mini-LEDs. Chem. Eng. J. 2021, 426, 130849. [Google Scholar]
- Triana, M.A.; Hsiang, E.-L.; Zhang, C.; Dong, Y.; Wu, S.-T. Luminescent Nanomaterials for Energy-Efficient Display and Healthcare. ACS Energy Lett. 2022, 7, 1001–1020. [Google Scholar] [CrossRef]
- Wu, Y.; Ma, J.; Su, P.; Zhang, L.; Xia, B. Full-Color Realization of Micro-LED Displays. Nanomaterials 2020, 10, 2482. [Google Scholar] [CrossRef]
- Wei, S.; Fan, Z.; Zhu, Z.; Ma, D. Design of a Head-up Display Based on Freeform Reflective Systems for Automotive Applications. Appl. Opt. 2019, 58, 1675–1681. [Google Scholar] [CrossRef]
- Shih, C.-Y.; Tseng, C.-C. Dual-Eyebox Head-up Display. In Proceedings of the 2018 3rd IEEE International Conference on Intelligent Transportation Engineering (ICITE), Singapore, 3–5 September 2018; IEEE: Singapore, 2018; pp. 105–109. [Google Scholar]
- Zhou, M.; Cheng, D.; Wang, Q.; Chen, H.; Wang, Y. Design of an Off-Axis Four-Mirror System for Automotive Head-up Display. In Proceedings of the AOPC 2020: Display Technology; Photonic MEMS, THz MEMS, and Metamaterials, and AI in Optics and Photonics, Beijing, China, 5 November 2020; Wang, Q., Luo, H., Xie, H., Lee, C., Cao, L., Yang, B., Cheng, J., Xu, Z., Wang, Y., Wang, Y., et al., Eds.; SPIE: Beijing, China, 2020; p. 6. [Google Scholar]
- Chand, T.; Debnath, S.K.; Rayagond, S.K.; Karar, V. Design of Refractive Head-up Display System Using Rotational Symmetric Aspheric Optics. Optik 2017, 131, 515–519. [Google Scholar] [CrossRef]
- Born, M.; Wolf, E. Principles of Optics; Pergamon Press INC: New York, NY, USA, 1959. [Google Scholar]
- Gao, L. Introduction of Head Up Display (HUD). China Terminol. 2014, 16, 19–21. [Google Scholar]
- Huang, X.Z. Research on Optical Module Technology of Vehicle Head-Up Display System; Institute of Optoelectronic Technology, Chinese Academy of Sciences: Chengdu, China, 2019. [Google Scholar]
- Lee, J.-H.; Yanusik, I.; Choi, Y.; Kang, B.; Hwang, C.; Malinovskaya, E.; Park, J.; Nam, D.; Lee, C.; Kim, C.; et al. Optical Design of Automotive Augmented Reality 3D Head-up Display with Light-Field Rendering. In Proceedings of the Advances in Display Technologies XI; Lee, J.-H., Wang, Q.-H., Yoon, T.-H., Eds.; SPIE: Online Only, USA, 5 March 2021; p. 16. [Google Scholar]
- Okumura, H.; Hotta, A.; Sasaki, T.; Horiuchi, K.; Okada, N. Wide Field of View Optical Combiner for Augmented Reality Head-up Displays. In Proceedings of the 2018 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 12–14 January 2018; IEEE: Las Vegas, NV, USA, 2018; pp. 1–4. [Google Scholar]
- Homan, M. The Use of Optical Waveguides in Head up Display (HUD) Applications. In Proceedings of the Display Technologies and Applications for Defense, Security, and Avionics VII, Baltimore, MD, USA, 29 April–3 May 2013; Desjardins, D.D., Sarma, K.R., Eds.; SPIE: Bellingham, DC, USA, 2013; Volume 8736, p. 87360E. [Google Scholar]
- Amitai, Y. P-21: Extremely Compact High-Performance HMDs Based on Substrate-Guided Optical Element. SID Symp. Dig. Tech. Pap. 2004, 35, 310–313. [Google Scholar] [CrossRef]
- Amitai, Y. P-27: A Two-Dimensional Aperture Expander for Ultra-Compact, High-Performance Head-Worn Displays. SID Symp. Dig. Tech. Pap. 2005, 36, 360. [Google Scholar] [CrossRef]
- Gu, L.; Cheng, D.; Wang, Q.; Hou, Q.; Wang, Y. Design of a Two-Dimensional Stray-Light-Free Geometrical Waveguide Head-up Display. Appl. Opt. 2018, 57, 9246–9256. [Google Scholar] [CrossRef] [PubMed]
- Gu, L.; Cheng, D.; Wang, Q.; Hou, Q.; Wang, S.; Yang, T.; Wang, Y. Design of a Uniform-Illumination Two-Dimensional Waveguide Head-up Display with Thin Plate Compensator. Opt. Express 2019, 27, 12692. [Google Scholar] [CrossRef]
- Chen, C.-Y.; Yang, T.-T.; Sun, W.-S. Optics System Design Applying a Micro-Prism Array of a Single Lens Stereo Image Pair. Opt. Express 2008, 16, 15495–15505. [Google Scholar] [CrossRef] [PubMed]
- Aoyagi, T.; Aoyagi, Y.; Namba, S. High-Efficiency Blazed Grating Couplers. Appl. Phys. Lett. 1976, 29, 303–304. [Google Scholar] [CrossRef]
- Xu, J.; Yang, S.; Wu, L.; Xu, L.; Li, Y.; Liao, R.; Qu, M.; Quan, X.; Cheng, X. Design and Fabrication of a High-Performance Binary Blazed Grating Coupler for Perfectly Perpendicular Coupling. Opt. Express 2021, 29, 42999–43010. [Google Scholar] [CrossRef]
- Xiong, J.; Yin, K.; Li, K.; Wu, S.-T. Holographic Optical Elements for Augmented Reality: Principles, Present Status, and Future Perspectives. Adv. Photonics Res. 2021, 2, 2000049. [Google Scholar] [CrossRef]
- Draper, C.T.; Blanche, P.-A. Examining Aberrations Due to Depth of Field in Holographic Pupil Replication Waveguide Systems. Appl. Opt. 2021, 60, 1653–1659. [Google Scholar] [CrossRef]
- Lee, Y.-H.; Yin, K.; Wu, S.-T. Reflective Polarization Volume Gratings for High Efficiency Waveguide-Coupling Augmented Reality Displays. Opt. Express 2017, 25, 27008–27014. [Google Scholar] [CrossRef] [PubMed]
- Sakhno, O.; Gritsai, Y.; Sahm, H.; Stumpe, J. Fabrication and Performance of Efficient Thin Circular Polarization Gratings with Bragg Properties Using Bulk Photo-Alignment of a Liquid Crystalline Polymer. Appl. Phys. B 2018, 124, 52. [Google Scholar] [CrossRef]
- Yaroshchuk, O.; Reznikov, Y. Photoalignment of Liquid Crystals: Basics and Current Trends. J. Mater. Chem. 2012, 22, 286–300. [Google Scholar] [CrossRef]
- Mukawa, H.; Akutsu, K.; Matsumura, I.; Nakano, S.; Yoshida, T.; Kuwahara, M.; Aiki, K. A Full-color Eyewear Display Using Planar Waveguides with Reflection Volume Holograms. J. Soc. Inf. Disp. 2009, 17, 185–193. [Google Scholar] [CrossRef]
- Guo, J.; Tu, Y.; Yang, L.; Wang, L.; Wang, B. Design of a Multiplexing Grating for Color Holographic Waveguide. Opt. Eng. 2015, 54, 125105. [Google Scholar] [CrossRef]
- Ditcovski, R.; Avayu, O.; Ellenbogen, T. Full-Color Optical Combiner Based on Multilayered Metasurface Design. In Proceedings of the Advances in Display Technologies IX, San Francisco, CA, USA, 1 March 2019; Wang, Q.-H., Yoon, T.-H., Lee, J.-H., Eds.; SPIE: San Francisco, CA, USA, 1 March 2019; p. 27. [Google Scholar]
- Cheng, D.; Wang, Q.; Liu, Y.; Chen, H.; Ni, D.; Wang, X.; Yao, C.; Hou, Q.; Hou, W.; Luo, G.; et al. Design and Manufacture AR Head-Mounted Displays: A Review and Outlook. Light Adv. Manuf. 2021, 2, 336. [Google Scholar] [CrossRef]
- Han, J.; Liu, J.; Yao, X.; Wang, Y. Portable Waveguide Display System with a Large Field of View by Integrating Freeform Elements and Volume Holograms. Opt. Express 2015, 23, 3534–3549. [Google Scholar] [CrossRef] [PubMed]
- Gabbard, J.L.; Fitch, G.M.; Kim, H. Behind the Glass: Driver Challenges and Opportunities for AR Automotive Applications. Proc. IEEE 2014, 102, 124–136. [Google Scholar] [CrossRef]
- Tufano, D.R. Automotive HUDs: The Overlooked Safety Issues. Human Factors 1997, 39, 303–311. [Google Scholar] [CrossRef] [PubMed]
- Ng-Thow-Hing, V.; Bark, K.; Beckwith, L. User-centered perspectives for automotive augmented reality. In Proceedings of the IEEE International Symposium on Mixed and Augmented Reality, Adelaide, SA, Australia, 1–4 October 2013; pp. 13–22. [Google Scholar]
- Ward, N.J.; Parkes, A. Head-up Displays and Their Automotive Application: An Overview of Human Factors Issues Affecting Safety. Accid. Anal. Prev. 1994, 26, 703–717. [Google Scholar] [CrossRef] [PubMed]
- Continental’s 2017 Augmented Reality-Head Up Display Prototype. Available online: https://continental-head-up-display.com (accessed on 1 January 2018).
- Jiang, Q.; Guo, Z. AR-HUD Optical System Design and Its Multiple Configurations Analysis. Photonics 2023, 10, 954. [Google Scholar] [CrossRef]
- Seo, J.H.; Yoon, C.Y.; Oh, J.H.; Kang, S.B.; Yang, C.; Lee, M.R.; Han, Y.H. 59-4: A Study on Multi-depth Head-Up Display. SID Symp. Dig. Tech. Pap. 2017, 48, 883–885. [Google Scholar] [CrossRef]
- Coni, P.; Bardon, J.-L.; Damamme, N.; Coe-Sullivan, S.; Dimov, F.I. 56-1: A Multiplane Holographic HUD Using Light Selectivity of Bragg Grating. SID Symp. Dig. Tech. Pap. 2019, 50, 775–778. [Google Scholar] [CrossRef]
- Lv, Z.; Xu, Y.; Yang, Y.; Liu, J. Multiplane Holographic Augmented Reality Head-up Display with a Real–Virtual Dual Mode and Large Eyebox. Appl. Opt. 2022, 61, 9962–9971. [Google Scholar] [CrossRef]
- Ukkusuri, S.; Gkritza, K.; Qian, X.; Sadri, A.M. Best Practices for Maximizing Driver Attention to Work Zone Warning Signs; Purdue University: West Lafayette, IN, USA, 2017. [Google Scholar] [CrossRef]
- Zhan, T.; Yin, K.; Xiong, J.; He, Z.; Wu, S.-T. Augmented Reality and Virtual Reality Displays: Perspectives and Challenges. iScience 2020, 23, 101397. [Google Scholar] [CrossRef]
- Li, K.; Geng, Y.; Yöntem, A.Ö.; Chu, D.; Meijering, V.; Dias, E.; Skrypchuk, L. Head-up Display with Dynamic Depth-Variable Viewing Effect. Optik 2020, 221, 165319. [Google Scholar] [CrossRef]
- Werber, A.; Zappe, H. Tunable Microfluidic Microlenses. Appl. Opt. 2005, 44, 3238–3245. [Google Scholar] [CrossRef]
- Dong, L.; Agarwal, A.K.; Beebe, D.J.; Jiang, H. Adaptive Liquid Microlenses Activated by Stimuli-Responsive Hydrogels. Nature 2006, 442, 551–554. [Google Scholar] [CrossRef]
- Waibel, P.; Mader, D.; Liebetraut, P.; Zappe, H.; Seifert, A. Chromatic Aberration Control for Tunable All-Silicone Membrane Microlenses. Opt. Express 2011, 19, 18584–18592. [Google Scholar] [CrossRef]
- Shian, S.; Diebold, R.M.; Clarke, D.R. High-Speed, Compact, Adaptive Lenses Using in-Line Transparent Dielectric Elastomer Actuator Membranes. In Proceedings of the Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 11–14 March 2013; Bar-Cohen, Y., Ed.; SPIE: Bellingham, DC, USA, 2013; Volume 8687, p. 86872D. [Google Scholar]
- Zhan, T.; Lee, Y.; Xiong, J.; Tan, G.; Yin, K.; Yang, J.; Liu, S.; Wu, S. High-efficiency Switchable Optical Elements for Advanced Head-up Displays. J. Soc. Inf. Disp. 2019, 27, 223–231. [Google Scholar] [CrossRef]
- Mu, C.-T.; Lin, W.-T.; Chen, C.-H. Zoomable Head-up Display with the Integration of Holographic and Geometrical Imaging. Opt. Express 2020, 28, 35716–35723. [Google Scholar] [CrossRef]
- Matsumoto, T.; Kusafuka, K.; Hamagishi, G.; Takahashi, H. P-87: Glassless 3D Head Up Display Using Parallax Barrier with Eye Tracking Image Processing. SID Symp. Dig. Tech. Pap. 2018, 49, 1511–1514. [Google Scholar] [CrossRef]
- Kalinina, A.; Yanusik, I.; Dubinin, G.; Morozov, A.; Lee, J.-H. Full-Color AR 3D Head-up Display with Extended Field of View Based on a Waveguide with Pupil Replication. In Proceedings of the Advances in Display Technologies XII, San Francisco, CA, USA, 4 March 2022; Lee, J.-H., Wang, Q.-H., Yoon, T.-H., Eds.; SPIE: San Francisco, CA, USA, 2022; p. 17. [Google Scholar]
- Lv, Z.; Li, J.; Yang, Y.; Liu, J. 3D Head-up Display with a Multiple Extended Depth of Field Based on Integral Imaging and Holographic Optical Elements. Opt. Express 2023, 31, 964. [Google Scholar] [CrossRef]
- Zhou, F.; Zhou, F.; Chen, Y.; Hua, J.; Qiao, W.; Chen, L. Vector Light Field Display Based on an Intertwined Flat Lens with Large Depth of Focus. Optica 2022, 9, 288. [Google Scholar] [CrossRef]
- Shi, J.; Hua, J.; Zhou, F.; Yang, M.; Qiao, W. Augmented Reality Vector Light Field Display with Large Viewing Distance Based on Pixelated Multilevel Blazed Gratings. Photonics 2021, 8, 337. [Google Scholar] [CrossRef]
- Hua, J.; Hua, E.; Zhou, F.; Shi, J.; Wang, C.; Duan, H.; Hu, Y.; Qiao, W.; Chen, L. Foveated Glasses-Free 3D Display with Ultrawide Field of View via a Large-Scale 2D-Metagrating Complex. Light Sci. Appl. 2021, 10, 213. [Google Scholar] [CrossRef]
- Hahn, J.; Kim, H.; Lim, Y.; Park, G.; Lee, B. Wide Viewing Angle Dynamic Holographic Stereogram with a Curved Array of Spatial Light Modulators. Opt. Express 2008, 16, 12372–12386. [Google Scholar] [CrossRef]
- Ting, C.-H.; Chang, Y.-C.; Chen, C.-H.; Huang, Y.-P.; Tsai, H.-W. Multi-User 3D Film on a Time-Multiplexed Side-Emission Backlight System. Appl. Opt. 2016, 55, 7922–7928. [Google Scholar] [CrossRef]
- Fattal, D.; Peng, Z.; Tran, T.; Vo, S.; Fiorentino, M.; Brug, J.; Beausoleil, R.G. A Multi-Directional Backlight for a Wide-Angle, Glasses-Free Three-Dimensional Display. Nature 2013, 495, 348–351. [Google Scholar] [CrossRef]
- Li, J.; Tu, H.-Y.; Yeh, W.-C.; Gui, J.; Cheng, C.-J. Holographic Three-Dimensional Display and Hologram Calculation Based on Liquid Crystal on Silicon Device. Appl. Opt. 2014, 53, G222–G231. [Google Scholar] [CrossRef]
- Fan, Z.; Weng, Y.; Chen, G.; Liao, H. 3D Interactive Surgical Visualization System Using Mobile Spatial Information Acquisition and Autostereoscopic Display. J. Biomed. Inform. 2017, 71, 154–164. [Google Scholar] [CrossRef]
- Paturzo, M.; Memmolo, P.; Finizio, A.; Näsänen, R.; Naughton, T.J.; Ferraro, P. Synthesis and Display of Dynamic Holographic 3D Scenes with Real-World Objects. Opt. Express 2010, 18, 8806–8815. [Google Scholar] [CrossRef]
- Takaki, Y. Super Multi-View and Holographic Displays Using MEMS Devices. Displays 2015, 37, 19–24. [Google Scholar] [CrossRef]
- Xue, G.; Liu, J.; Li, X.; Jia, J.; Zhang, Z.; Hu, B.; Wang, Y. Multiplexing Encoding Method for Full-Color Dynamic 3D Holographic Display. Opt. Express 2014, 22, 18473–18482. [Google Scholar] [CrossRef] [PubMed]
- Teich, M.; Schuster, T.; Leister, N.; Zozgornik, S.; Fugal, J.; Wagner, T.; Zschau, E.; Häussler, R.; Stolle, H. Real-Time, Large-Depth Holographic 3D Head-up Display: Selected Aspects. Appl. Opt. 2022, 61, B156–B163. [Google Scholar] [CrossRef] [PubMed]
- Shi, L.; Li, B.; Kim, C.; Kellnhofer, P.; Matusik, W. Towards Real-Time Photorealistic 3D Holography with Deep Neural Networks. Nature 2021, 591, 234–239. [Google Scholar] [CrossRef] [PubMed]
- Chang, C.; Zhu, D.; Li, J.; Wang, D.; Xia, J.; Zhang, X. Three-Dimensional Computer Holography Enabled from a Single 2D Image. Opt. Lett. 2022, 47, 2202–2205. [Google Scholar] [CrossRef] [PubMed]
- Gao, Q.; Liu, J.; Han, J.; Li, X. Monocular 3D See-through Head-Mounted Display via Complex Amplitude Modulation. Opt. Express 2016, 24, 17372–17383. [Google Scholar] [CrossRef] [PubMed]
- Shiraki, A.; Takada, N.; Niwa, M.; Ichihashi, Y.; Shimobaba, T.; Masuda, N.; Ito, T. Simplified Electroholographic Color Reconstruction System Using Graphics Processing Unit and Liquid Crystal Display Projector. Opt. Express 2009, 17, 16038–16045. [Google Scholar] [CrossRef] [PubMed]
- Makowski, M.; Ducin, I.; Sypek, M.; Siemion, A.; Siemion, A.; Suszek, J.; Kolodziejczyk, A. Color Image Projection Based on Fourier Holograms. Opt. Lett. 2010, 35, 1227–1229. [Google Scholar] [CrossRef] [PubMed]
- Makowski, M.; Ducin, I.; Kakarenko, K.; Suszek, J.; Sypek, M.; Kolodziejczyk, A. Simple Holographic Projection in Color. Opt. Express 2012, 20, 25130–25136. [Google Scholar] [CrossRef]
- Oikawa, M.; Shimobaba, T.; Yoda, T.; Nakayama, H.; Shiraki, A.; Masuda, N.; Ito, T. Time-Division Color Electroholography Using One-Chip RGB LED and Synchronizing Controller. Opt. Express 2011, 19, 12008–12013. [Google Scholar] [CrossRef]
- Bigler, C.M.; Mann, M.S.; Blanche, P.A. Holographic waveguide HUD with in-line pupil expansion and 2D FOV expansion. Appl. Opt. 2019, 58, G326–G331. [Google Scholar] [CrossRef]
- Fehrembach, A.-L.; Popov, E.; Tayeb, G.; Maystre, D. Narrow-Band Filtering with Whispering Modes in Gratings Made of Fibers. Opt. Express 2007, 15, 15734–15740. [Google Scholar] [CrossRef] [PubMed]
- Bertin, H.; Brûlé, Y.; Magno, G.; Lopez, T.; Gogol, P.; Pradere, L.; Gralak, B.; Barat, D.; Demésy, G.; Dagens, B. Correlated Disordered Plasmonic Nanostructures Arrays for Augmented Reality. ACS Photonics 2018, 5, 2661–2668. [Google Scholar] [CrossRef]
- Zhu, R.; Chen, H.; Kosa, T.; Coutino, P.; Tan, G.; Wu, S.-T. High-Ambient-Contrast Augmented Reality with a Tunable Transmittance Liquid Crystal Film and a Functional Reflective Polarizer. J. Soc. Inf. Disp. 2016, 24, 229–233. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metrics | C-HUD [23] | W-HUD [24] | AR-HUD [25] | Ideal |
|---|---|---|---|---|
| FOV | <5° × 1.4° | 6° × 2° | >13° × 5° | >20° × 10° |
| VID | ~1 m | <4.5 m | >7 m | >20 m |
| Brightness | <10,000 cd/m2 | <10,000 cd/m2 | >10,000 cd/m2 | >10,000 cd/m2 |
| Volume | <2 L | <4 L | <10 L | <3 L |
| Micro Projector | Principle | Resolution | Optical Efficiency | Image Contrast | Formfactor |
|---|---|---|---|---|---|
| LCD-TFT | Transmissive | Low | Low | Medium | Small |
| DLP | Reflective | Medium | High | High | High |
| LCOS | Reflective | High | Medium | Medium | Medium |
| Micro LED | Self-emissive | High | High | High | Small |
| Technology | FOV | VID | Eyebox | Volume | |
|---|---|---|---|---|---|
| Near-image plane | Off-axis four-mirror system [42] | 6° × 3° | 5 m | 106 × 66 mm | big |
| Far-image plane | Geometric waveguide [54] | 24° × 15° | >10 m | 80 × 80 mm | small |
| SRG [107] | 16° × 14.25° | >10 m | 50 × 50 mm | ~2 V | |
| VHG [58] | 24° × 12.6° | >10 m | 50 × 100 mm | small | |
| Multiple image planes | Dual optical routes [72] | 6° × 2°/10° × 3° | 2/8~24 m | 120 × 60 mm | — |
| Laser scanning [73] | 6° × 1°/8° × 2° | 2/5 m | 130 × 40 mm | — | |
| Variable-depth image plane | Liquid lens [78] | — | 2 m | 86 × 84/139 × 139 mm | — |
| Spatial light modulator [84] | — | 3–30 m | — | — | |
| 3D-HUD | Parallax barrier [85] | — | 3.5 m | 126 × — mm | — |
| Binocular parallax based on a lens array | 20° × 7° | — | 130 × 60 mm | — | |
| Microlens-array-based binocular parallax [86] | — | 2.2 m | — | — | |
| Computer-generated hologram [99] | 5° × 3° | 1.9–4.5 m | — | — |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, C.; Qiao, W.; Hua, J.; Chen, L. Automotive Augmented Reality Head-Up Displays. Micromachines 2024, 15, 442. https://doi.org/10.3390/mi15040442
Zhou C, Qiao W, Hua J, Chen L. Automotive Augmented Reality Head-Up Displays. Micromachines. 2024; 15(4):442. https://doi.org/10.3390/mi15040442
Chicago/Turabian StyleZhou, Chen, Wen Qiao, Jianyu Hua, and Linsen Chen. 2024. "Automotive Augmented Reality Head-Up Displays" Micromachines 15, no. 4: 442. https://doi.org/10.3390/mi15040442
APA StyleZhou, C., Qiao, W., Hua, J., & Chen, L. (2024). Automotive Augmented Reality Head-Up Displays. Micromachines, 15(4), 442. https://doi.org/10.3390/mi15040442