4.1. Featureless Flat Surface
As mentioned in
Section 2.3, the bending angle
θ1 is a function only of the deployment factor
Df and the normalized hole spacing
.
Figure 5 shows contours of different bending angles as a function of
Df and the normalized hole spacing
. For a given deployment factor, larger values of the normalized spacing result in larger bending angles. To achieve a given targeted bending angle, one needs larger values of the normalized spacing for larger algebraic values of the deployment factor.
In this study, we mainly focus on how the behavior of the deployable device with fixed dimensions (l, s) changes as we vary the elastocapillary lengths by using membranes of different thicknesses. The model predictions presented below are plotted as a function of the normalized length to more explicitly show the effects of elastocapillary interactions between the membranes and the interfacial liquids.
Figure 6 shows representative captured images of the polyimide membranes under different deployment conditions on the featureless flat surfaces. As expected, for a given hole spacing
s = 1.5 mm, the bending angle is smaller for larger deployment distances (
Figure 6a
versus Figure 6b and
Figure 6c
versus Figure 6d). A larger membrane thickness leads to a smaller bending angle (
Figure 6a
versus Figure 6c and
Figure 6b
versus Figure 6d).
Figure 7 shows the predicted and experimentally observed bending angles for three different values of the deployment factor
Df = (
d –
l)/
s as a function of the normalized membrane length
l/
LEC. The two results agree well with each other.
As mentioned before, there exists a lower bound to the bending angle, θmin, due to the geometric constraints imposed by the push-pull wire and the holes punctured in the membrane. Recall that our energy minimization approach was applied only over the range (θmin, 180). For small normalized membrane lengths, the bending angle stays fixed at this value θmin. Only when the normalized membrane length l/LEC exceeds a threshold value corresponding to this θmin, then the bending angle increases with increasing normalized membrane lengths (or, for a given membrane length, as decreasing membrane thickness h, since LEC is inversely proportional to h3/2). A membrane with length l much larger than LEC is strongly deflected by surface tension forces and, thus, gives rise to large bending angles. A shorter or thicker membrane (l smaller than LEC) in contrast will not be significantly bent by surface tension forces.
For a given normalized membrane length, smaller algebraic values of the deployment factor result in larger bending angles (
Figure 8). From the constraint 0 <
d < l +
s, the deployment factor
Df can vary only within the range of (−
l/
s, 1). The deployment factor
Df governs the lower bound to the bending angle
θmin, which is also the initial bending angle of the membrane before it makes contact with the contact surface. Smaller deployment factors result in larger values of
θmin. For a given membrane length
l and a hole spacing
s, a smaller deployment distance
d leads to a smaller deployment factor
Df and, hence, a larger initial bending angle. Once again, the experimental results agree well with the modeling results.
Figure 5.
Contours of the predicted bending angle as a function of the normalized spacing and the deployment factor.
Figure 5.
Contours of the predicted bending angle as a function of the normalized spacing and the deployment factor.
Figure 6.
Optical images of the membranes of different thicknesses in contact with a featureless flat surface for different deployment distances.
Figure 6.
Optical images of the membranes of different thicknesses in contact with a featureless flat surface for different deployment distances.
Figure 7.
Modeling and experimental results of the bending angle of the membranes (l = 7 mm, s = 1.5 mm) in contact with featureless flat surfaces. The results are shown as a function of the normalized membrane length for different deployment factors.
Figure 7.
Modeling and experimental results of the bending angle of the membranes (l = 7 mm, s = 1.5 mm) in contact with featureless flat surfaces. The results are shown as a function of the normalized membrane length for different deployment factors.
Figure 8.
Modeling and experimental results of the bending angle as a function of the deployment factor.
Figure 8.
Modeling and experimental results of the bending angle as a function of the deployment factor.
Figure 9 shows the calculated membrane utilization and coverage ratios as a function of the normalized membrane length for different values of the deployment factor
Df. Recall that the membrane utilization ratio is defined as
ru = (
l2 + 2
Rsθ2)/
l and the membrane coverage ratio as
rc = (
l2 + 2
Rsθ2)/
d. For a given combination of the deployment factor and the hole spacing, as the normalized length increases, the membrane is more readily deformed to make larger contact areas, leading to enhanced coverage and utilization ratios. These quantitative results allow the selection of an optimal membrane thickness to achieve acceptable coverage or utilization ratios without severely compromising the mechanical robustness of the membrane.
The deployment factor and hole spacing also affect the coverage and utilization ratios, but in different ways. As the deployment factor increases (
i.e.,
s = 1 mm in
Figure 9b) or the hole spacing decreases (
i.e.,
Df =−0.3 in
Figure 9b), the utilization ratio monotonically increases. The coverage ratio, in contrast, decreases with the increasing deployment factor (
i.e.,
s = 1 mm in
Figure 9a) or decreasing hole spacing (
i.e.,
Df = −0.3 in
Figure 9a) when the normalized length is large (
l/
LEC > 15 in
Figure 9a). When the normalized length is small (
l/
LEC < 12 in
Figure 9a), the coverage ratio increases with the increasing deployment factor or decreasing hole spacing. This can be understood from the asymmetric behavior of the coverage ratio depending on whether the bending angle
θ1 is smaller or larger than 90°. As schematically illustrated in
Figure 10, for given values of
l and
s, the surface contact length
l2 increases with the deployment distance
d when
θ1 < 90°, whereas
l2 decreases with
d when
θ1 > 90°.
Figure 9.
The predicted membrane coverage and utilization ratios as a function of the normalized length.
Figure 9.
The predicted membrane coverage and utilization ratios as a function of the normalized length.
Figure 10.
Schematic illustrations and optical images of the changes in the membrane bending behavior for different deployment factors when θ1 < 90° and when θ1 > 90°.
Figure 10.
Schematic illustrations and optical images of the changes in the membrane bending behavior for different deployment factors when θ1 < 90° and when θ1 > 90°.
4.2. Flat Surface Incorporating a Sulcus
For the model surface with a single sulcus, the bending angles (
θ1,
θ2) are a function only of the deployment factor
Df, the normalized sulcus radius
Sf and the normalized spacing
.
Figure 11 shows the predicted contours of the bending angles as a function of the normalized spacing and the deployment factors for different normalized sulcus radii. For a given deployment factor and normalized sulcus radius, larger values of the normalized spacing result in larger bending angles. To achieve a given targeted bending angle
θ1, one needs larger values of the normalized spacing for larger algebraic values of the deployment factor. In contrast, smaller values of the normalized spacing are preferred for large values of the deployment factor to achieve a given targeted bending angle
θ2.
Figure 11.
The predicted contours of the bending angles as a function of the normalized spacing and the deployment factor for different normalized sulcus radii.
Figure 11.
The predicted contours of the bending angles as a function of the normalized spacing and the deployment factor for different normalized sulcus radii.
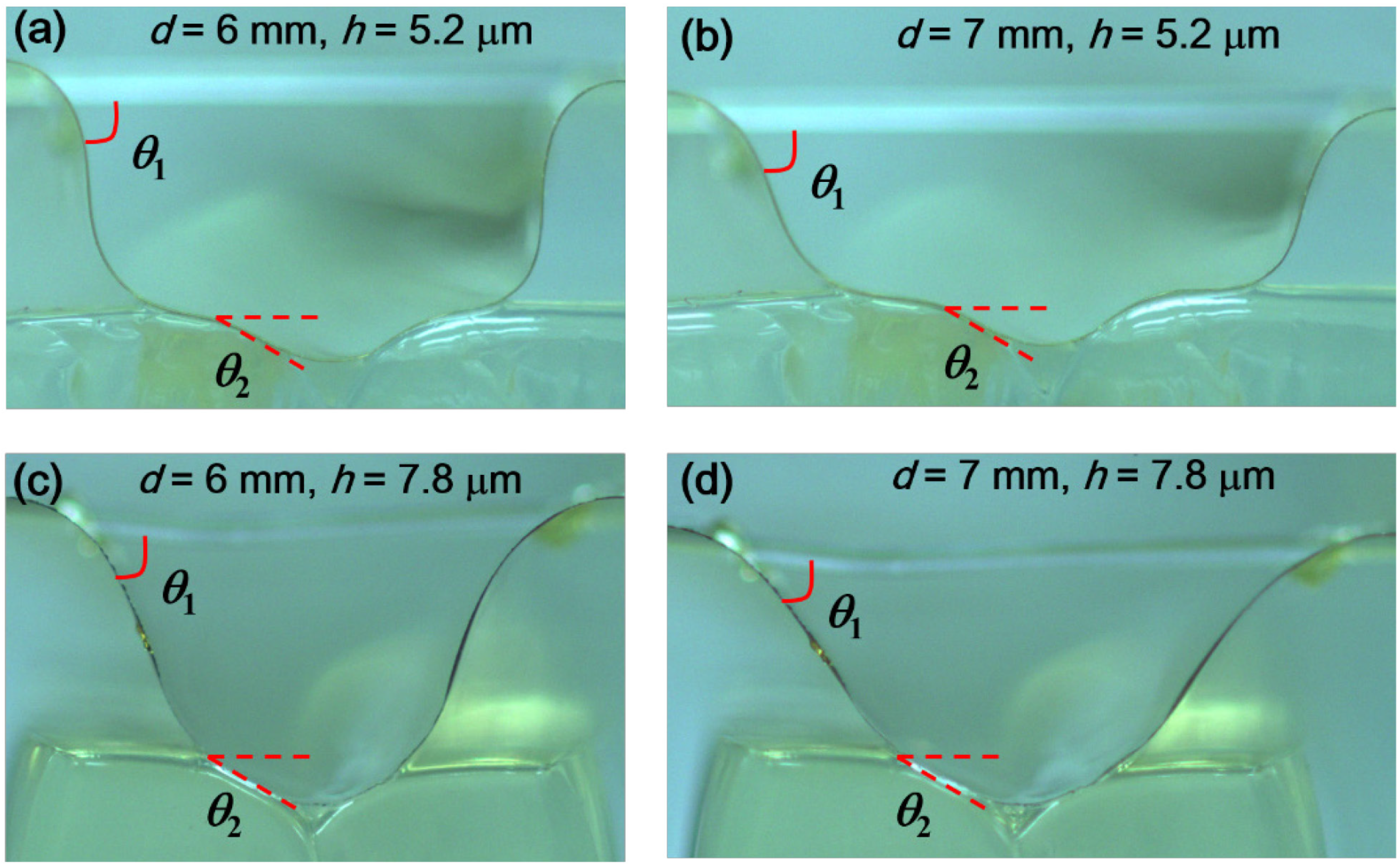
Like the cases of the featureless flat surface, the model predictions shown below are plotted as a function of the normalized length to help more explicitly illustrate the elastocapillary interactions between the membranes of different thicknesses. The single-fold total membrane length l and the hole spacing s are fixed at 7 mm and 1.5 mm, respectively.
Figure 12 shows representative optical images of the polyimide membranes. For a given deployment factor, as the thickness of the membrane increases (and, hence, as the normalized length decreases), the two bending angles
θ1 and
θ2 decrease.
Figure 13a,b shows the predicted and measured bending angles
θ1 and
θ2 as a function of the normalized membrane length. The general qualitative trend for
θ1 is similar to that for the featureless flat surfaces. Larger normalized membrane lengths lead to larger bending angles and, therefore, higher conformality. For the given set of the deployment factors and the radii of curvature of the sulci examined here, normalized lengths of the order of 20 and greater are necessary to achieve good conformality over the surface of the sulcus. The results of three different cases are shown in
Figure 13: (I)
Df = 0,
Sf = 1 (
Rs = 1.5 mm); (II)
Df = −1/3,
Sf = 1; (III)
Df = 0,
Sf = 4/3 (
Rs = 2 mm).
Figure 12.
Optical images of the membranes in contact with a surface incorporating a single valley for different deployment factors and normalized lengths.
Figure 12.
Optical images of the membranes in contact with a surface incorporating a single valley for different deployment factors and normalized lengths.
Figure 13.
Modeling and experimental results of the bending angles (a) θ1 and (b) θ2 of the membranes in contact with a surface incorporating a sulcus as a function of the normalized length.
Figure 13.
Modeling and experimental results of the bending angles (a) θ1 and (b) θ2 of the membranes in contact with a surface incorporating a sulcus as a function of the normalized length.
Figure 14 shows the predicted and measured bending angles
θ1 and
θ2 as a function of the deployment factor when
Sf = 1. For a normalized radius of curvature
Sf of 1, the deployment factor has a significant effect on the top bending angle
θ1, but a much smaller effect on the bottom bending angle
θ2 (Case I and II). However, for a given deployment factor
Df = 0,
θ2 is a strong function of
Sf, whereas
θ1 is only a weak function of
Sf (Case I and III). The presence of the valley reduces the length of the top membrane segments (adjacent to the wires) and, thereby, decreases the top bending angle when compared with the membrane on the featureless flat surfaces.
Comparing
Figure 8a and
Figure 14a, especially for the case with the smallest dimensionless membrane length
l/
LEC of six, we note that the bending angle decreases more rapidly with the increasing deployment factor for the surface with a sulcus than the featureless flat surface. When the spatial extent of the sulcus is sufficiently small, the top membrane segments are separated by the flat segments from the bottom segments covering the sulcus. Therefore, the geometric details of the sulcus do not significantly influence the top bending angle. In contrast,
θ2 is dependent on the sulcus dimension, increasing with
Sf.
Figure 15a,b shows the two bending angles as a function of the normalized radius of the sulcus. As the normalized sulcus radius increases, the bending angle
θ1 decreases, whereas bending angle
θ2 increases. A larger valley radius causes a longer portion of the membrane to be bent along the valley surface and, thus, a larger bending angle
θ2. Since the total membrane length is fixed, the effective membrane length is reduced and, thus, the bending angle
θ1 is decreased.
Figure 14.
Modeling and experimental results of the bending angles (a) θ1 and (b) θ2 as a function of the deployment factor.
Figure 14.
Modeling and experimental results of the bending angles (a) θ1 and (b) θ2 as a function of the deployment factor.
Figure 15.
Modeling and experimental results of the bending angles (a) θ1 and (b) θ2 as a function of the sulcus length factor.
Figure 15.
Modeling and experimental results of the bending angles (a) θ1 and (b) θ2 as a function of the sulcus length factor.
Figure 16 shows the calculated membrane utilization and coverage ratios as a function of the normalized membrane length for different values of the deployment factor
Df. For a given combination of the deployment factor and the hole spacing, as the normalized length increases, the membrane is more readily deformed and, thus, has a larger coverage and utilization ratios. However, the presence of a valley (or sulcus) reduces the effective length of membrane when compared with the featureless flat surface. Therefore, the membrane is less deformed and has smaller coverage and utilization ratios than a surface without a valley. Similar to the featureless flat surface, the deployment factor also affects the coverage and utilization ratios in different ways. As the deployment factor increases (
i.e.,
Sf = 1.5 in
Figure 16b) or the normalized sulcus radius increases (
i.e.,
Df = −0.3 in
Figure 16b), the utilization ratio monotonically increases. The coverage ratio, in contrast, decreases with the increasing deployment factor (
i.e.,
Sf = 1.5 in
Figure 16a) or increasing normalized sulcus radius (
i.e.,
Df = −0.3 in
Figure 16a) when the normalized length is large (
l/
LEC > 15 in
Figure 16a). However, when the normalized length is small (
l/
LEC < 12 in
Figure 16a), the coverage ratio increases with the increasing deployment factor or increasing normalized sulcus radius. This can be once again explained by the asymmetric behavior of the coverage ratio between when the bending angle
θ1 < 90° and when
θ1 > 90°. The surface contact length increases with the deployment distance
d when
θ1 < 90°, whereas it decreases with
d when
θ1 > 90° for given values of
l and
s.
Figure 16.
Predicted values of (a) the membrane coverage ratio and (b) the utilization ratio as a function of the normalized length for different combinations of the deployment factor and the normalized sulcus radius.
Figure 16.
Predicted values of (a) the membrane coverage ratio and (b) the utilization ratio as a function of the normalized length for different combinations of the deployment factor and the normalized sulcus radius.
4.3. Design Flow of the Deployable Device
The geometric parameters of the device (l, s, d and h), the mechanical properties of the membrane (E, v) and, if applicable, the surface tension of the liquid (γlg) must be selected to ensure successful device operation under the constraints and requirements of a specific application. Details of the design process flows differ for different applications. As an illustrative example, we present below a design process for a subdural ECoG device that can be introduced into and deployed along a gap between the skull and the cortical surface of a patient through minimally-invasive procedures.
In this subdural application, the gap
hg between the skull and the cortical surface (typically 1–2 mm) determines the maximum acceptable height
hmax of the device in its collapsed state. Assuming that the membrane segments located between two adjacent holes are bent to form hemispherical arcs in the collapsed state (
Figure 17a), one can then write:
The initial deployment distance of a single fold of the membrane (in the collapsed state) may be approximated as
d0 ≈ 2
s/π. Smaller values of
s are therefore preferred to make the device more compact in its collapsed state and also to make more of the membrane surface available for functional ECG electrodes. In practice, the minimum value of
s is limited by the precision of a manufacturing technique and typically:
where
rhole is the radius of the holes. With
s set at its minimum value, one can determine the maximum acceptable value of
l using Equation (17).
Next, one needs to ensure that the membrane can achieve sufficient conformal contact with a sulcus of the cortical surface by setting a minimum acceptable value of the non-dimensionalized sulcus radius (
Sf)
min:
This places one limit on the achievable deployment distance
dtarget in the fully-deployed state of the device:
If the push-pull wires are not allowed to bend down under the fully-deployed state, there is another limit on the achievable deployment distance
dtarget one needs to consider to ensure that the membrane extends below the bottom surface of the stem and thereby maintains contact with the cortical surface (
Figure 17b):
By considering trade-offs with the membrane utilization ratio or the membrane coverage ratio as illustrated in
Figure 16, one then determines the minimum acceptable value of the membrane normalized length (
l/
LEC)
min and hence the maximum acceptable value of the elastocapillary length (
LEC)
max.
The elastocapillary length is a function of the bending modulus of the membrane and the surface tension coefficient of the interfacial liquid, which may be a cerebrospinal fluid or a saline solution. For general engineering applications, one may choose low-volatility liquids of high surface tension coefficients γ and of negligible health or environmental hazard (e.g., glycerol). For a given interfacial liquid, the maximum acceptable value of the bending modulus of the membrane is:
A membrane material with a small Young’s modulus is generally preferred to minimize the bending stiffness and, thereby, increase the maximum acceptable membrane thickness. Practical values of the membrane thickness are limited by the requirements of manufacturing and device reliability/robustness. The value of the thickness is then chosen satisfying these requirements.
Figure 17.
The initial collapsed state (a) and the full deployment state (b) of the device.
Figure 17.
The initial collapsed state (a) and the full deployment state (b) of the device.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















