Uncalibrated Visual Servo Control of Magnetically Actuated Microrobots in a Fluid Environment

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Electromagnetic Actuation for Microrobotic Control

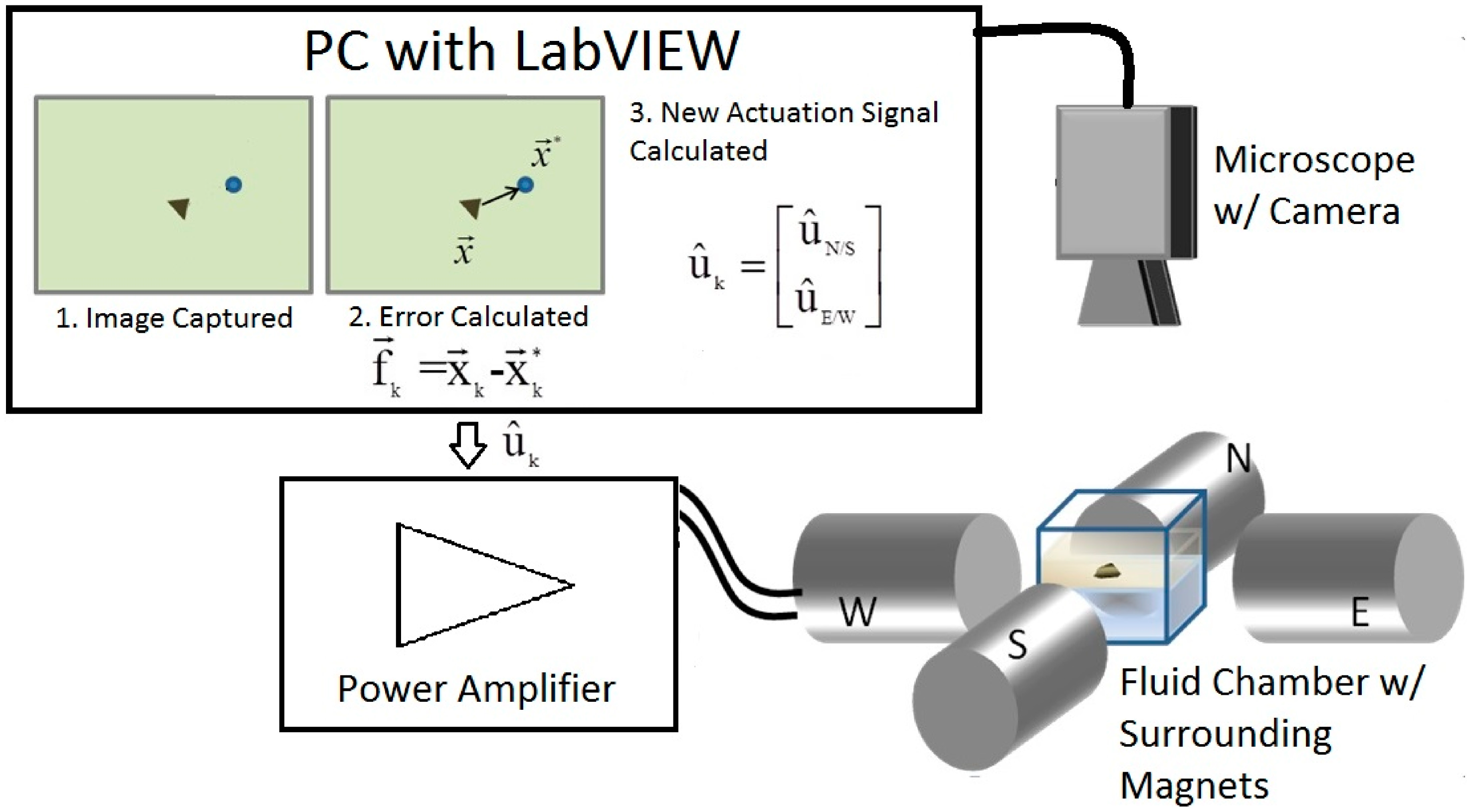
3. Uncalibrated Visual Servoing
3.1. Recursive Least Squares (RLS) Jacobian Estimation and Control
Algorithm 1. Recursive least squares control
| Given | |
| Do for k = 1, 2, … | |
| (9) | |
| (10) | |
| (11) | |
| (12) | |
| (13) | |
| End for | |
| End | |

3.2. Practical Implementation
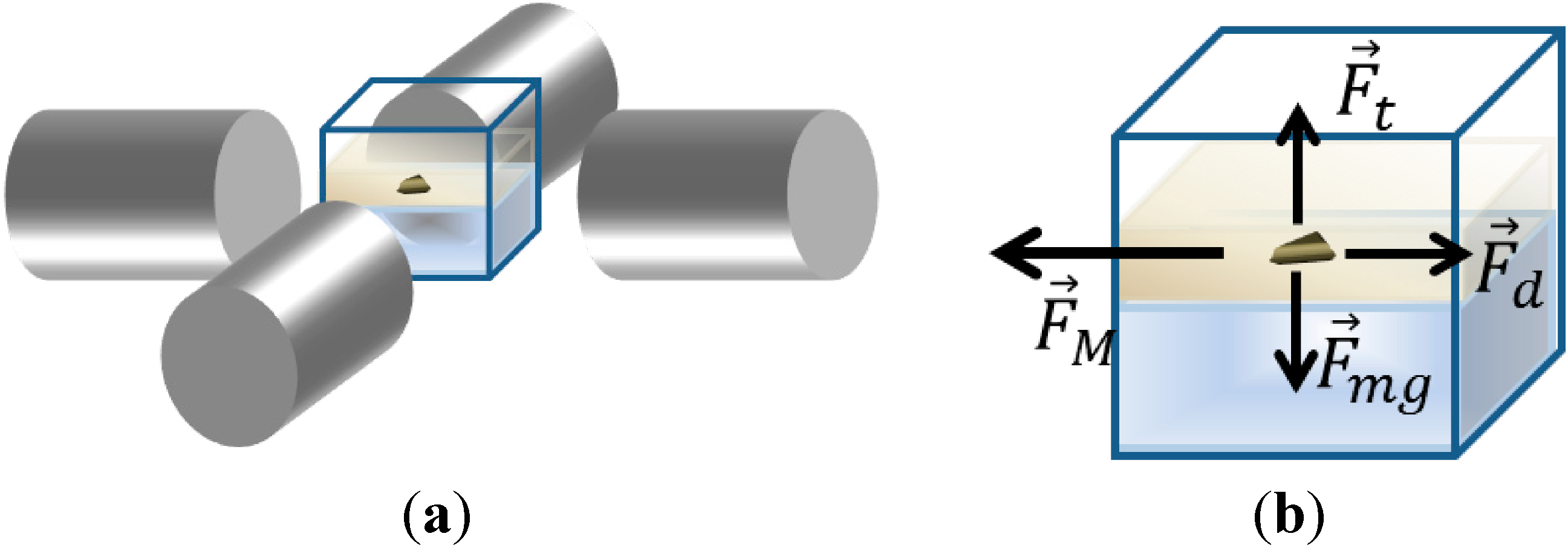
4. Experimental Work
4.1. Experimental System


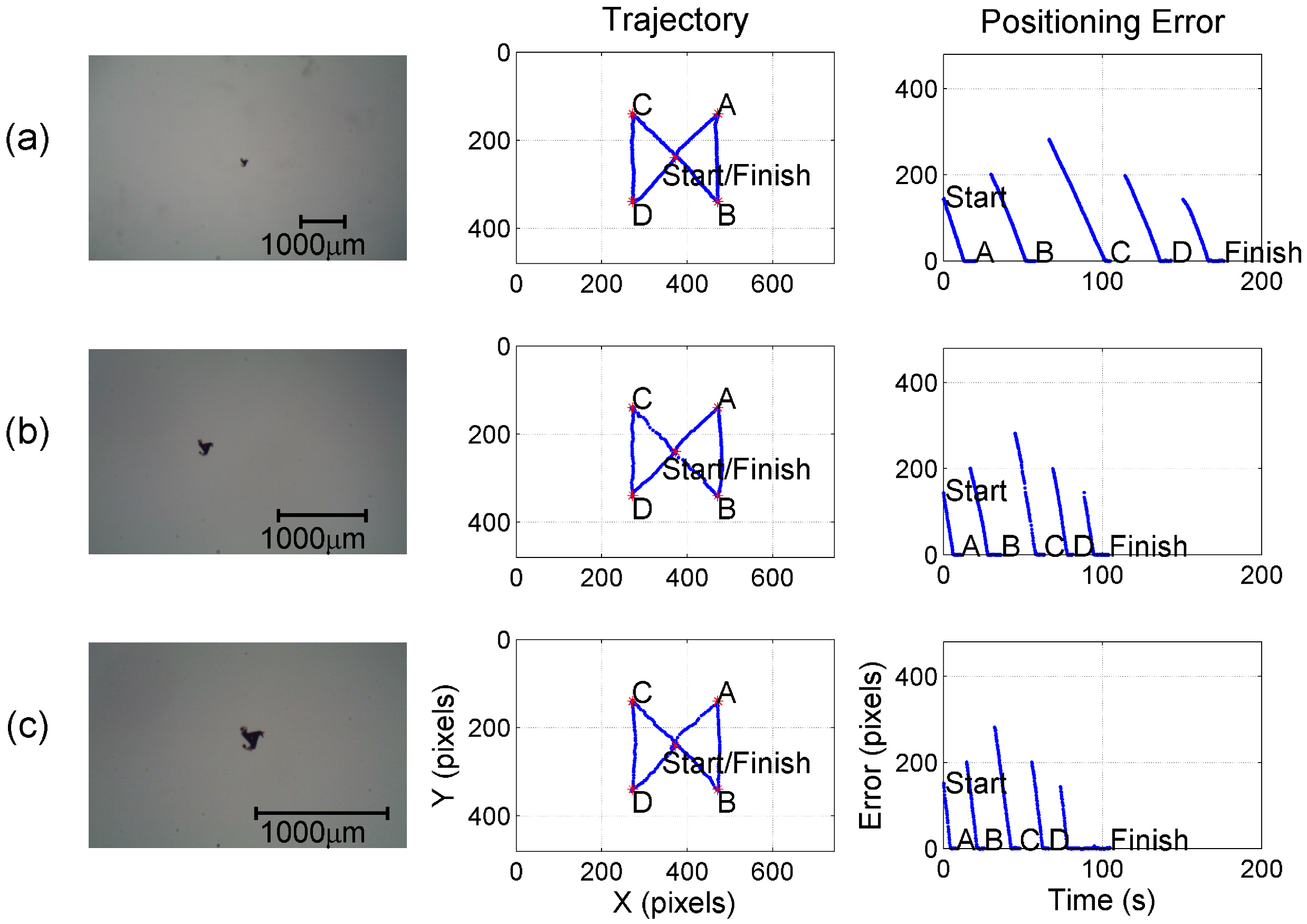
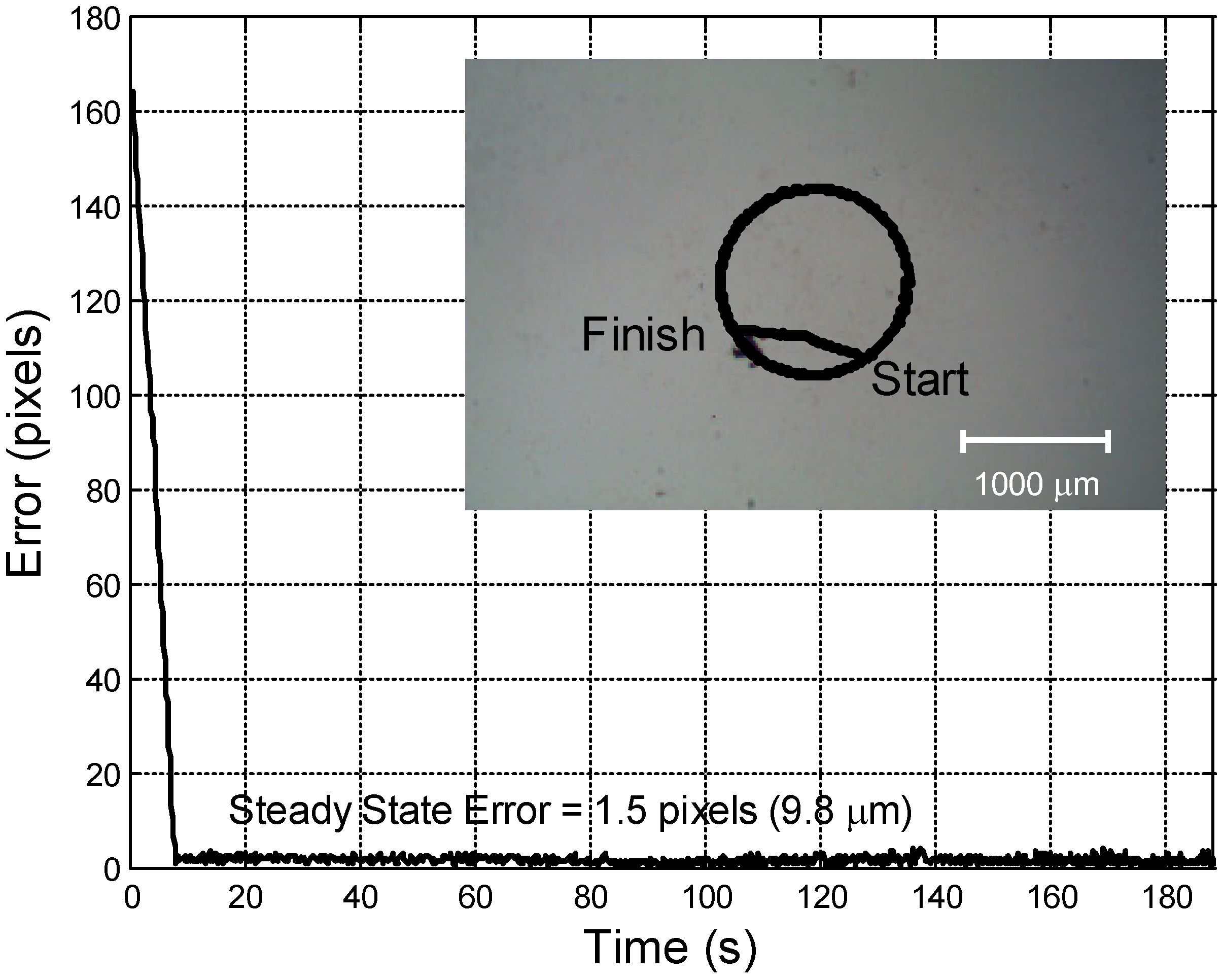
4.2. Stationary Target: Point to Point Motion
- Magnification
- Electromagnet position and orientation
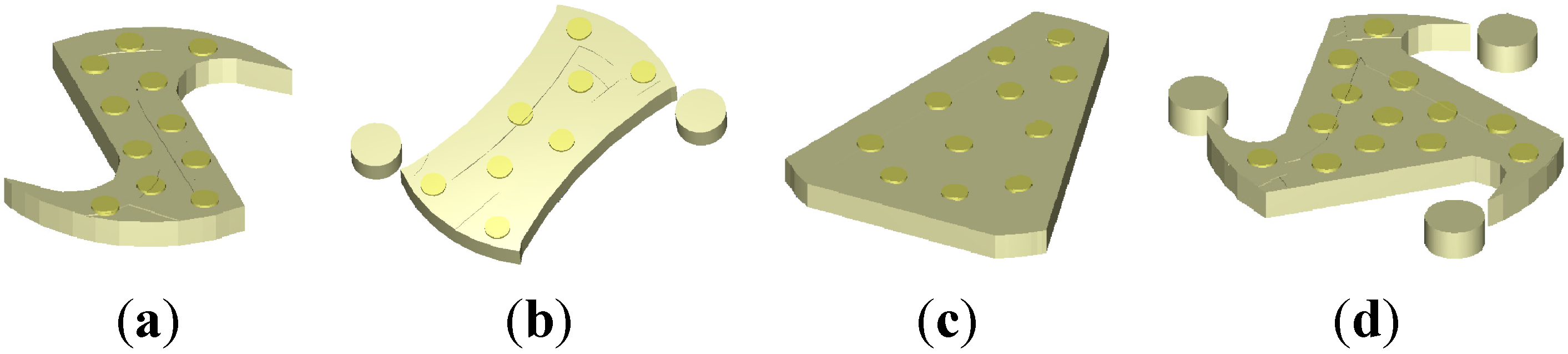
- Microrobot device morphology



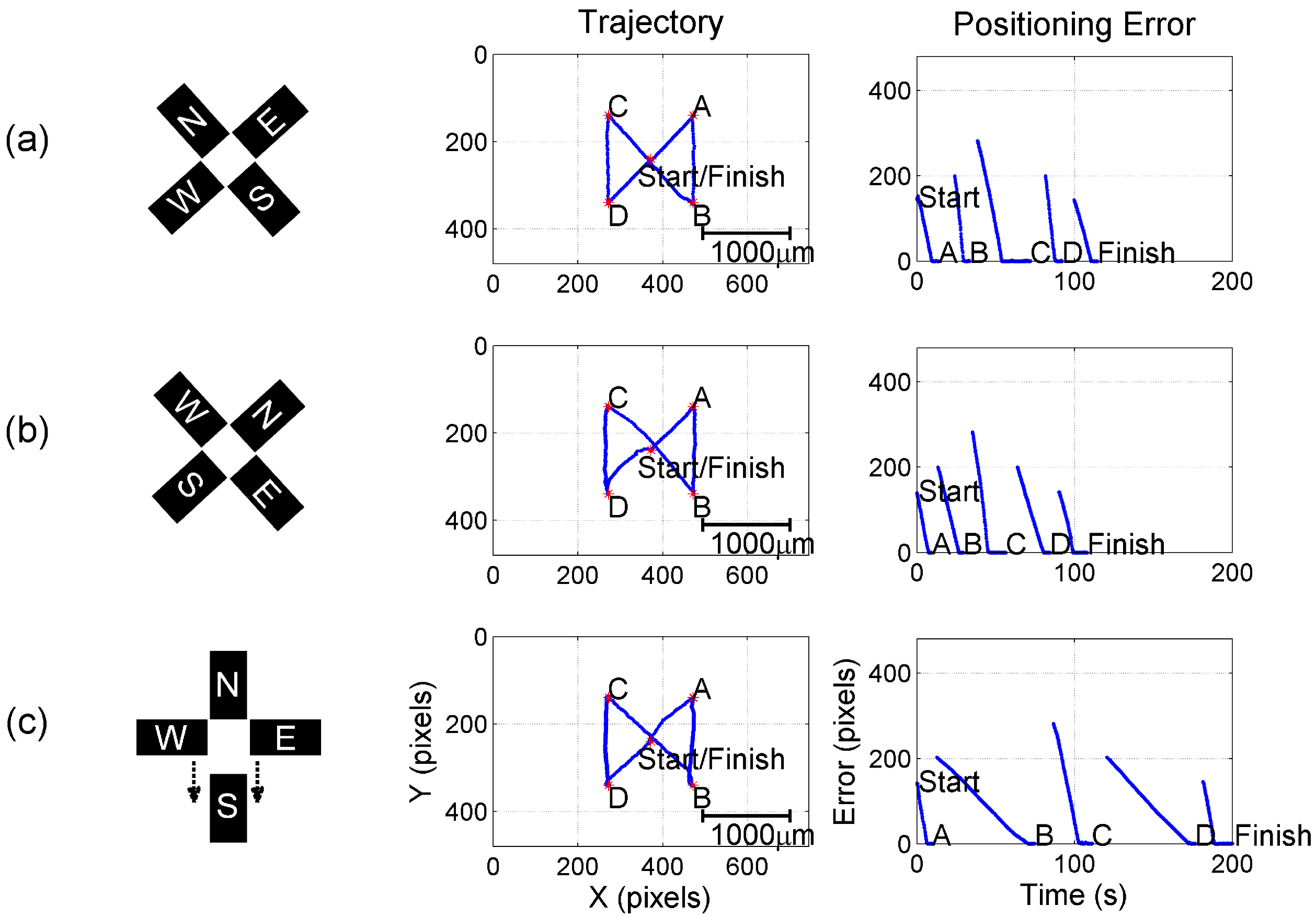
4.3. Moving Target: Circular Motion
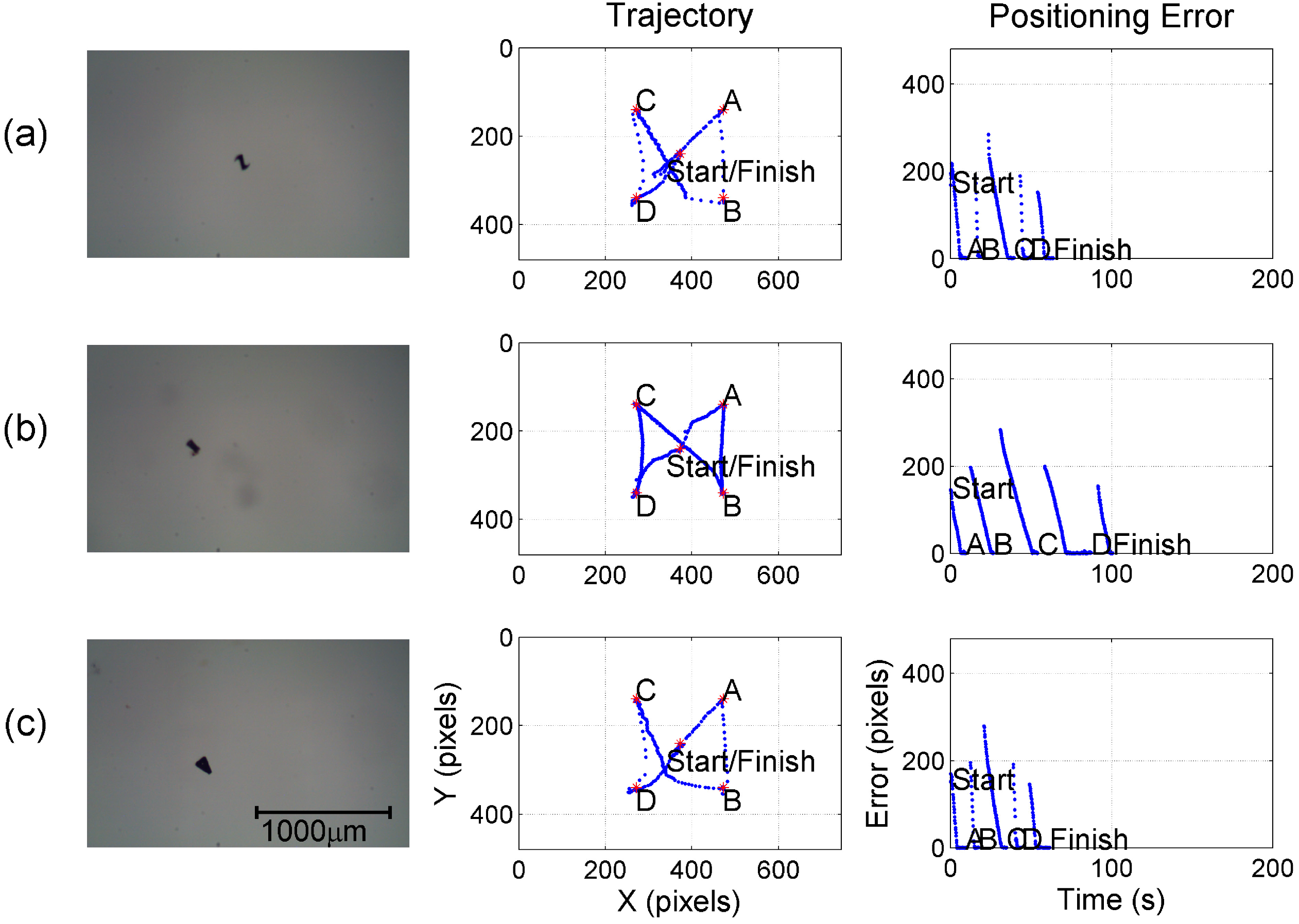
- Magnification
- Target speed
- Electromagnet array orientation
- Microrobot morphologies
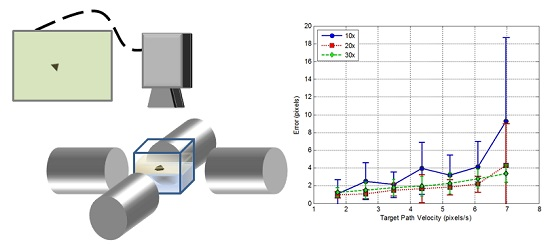
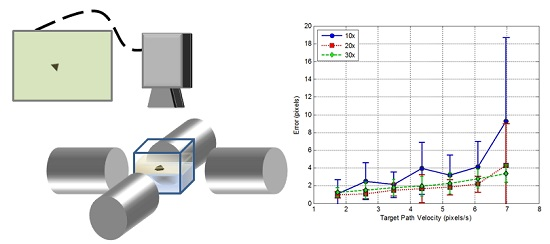
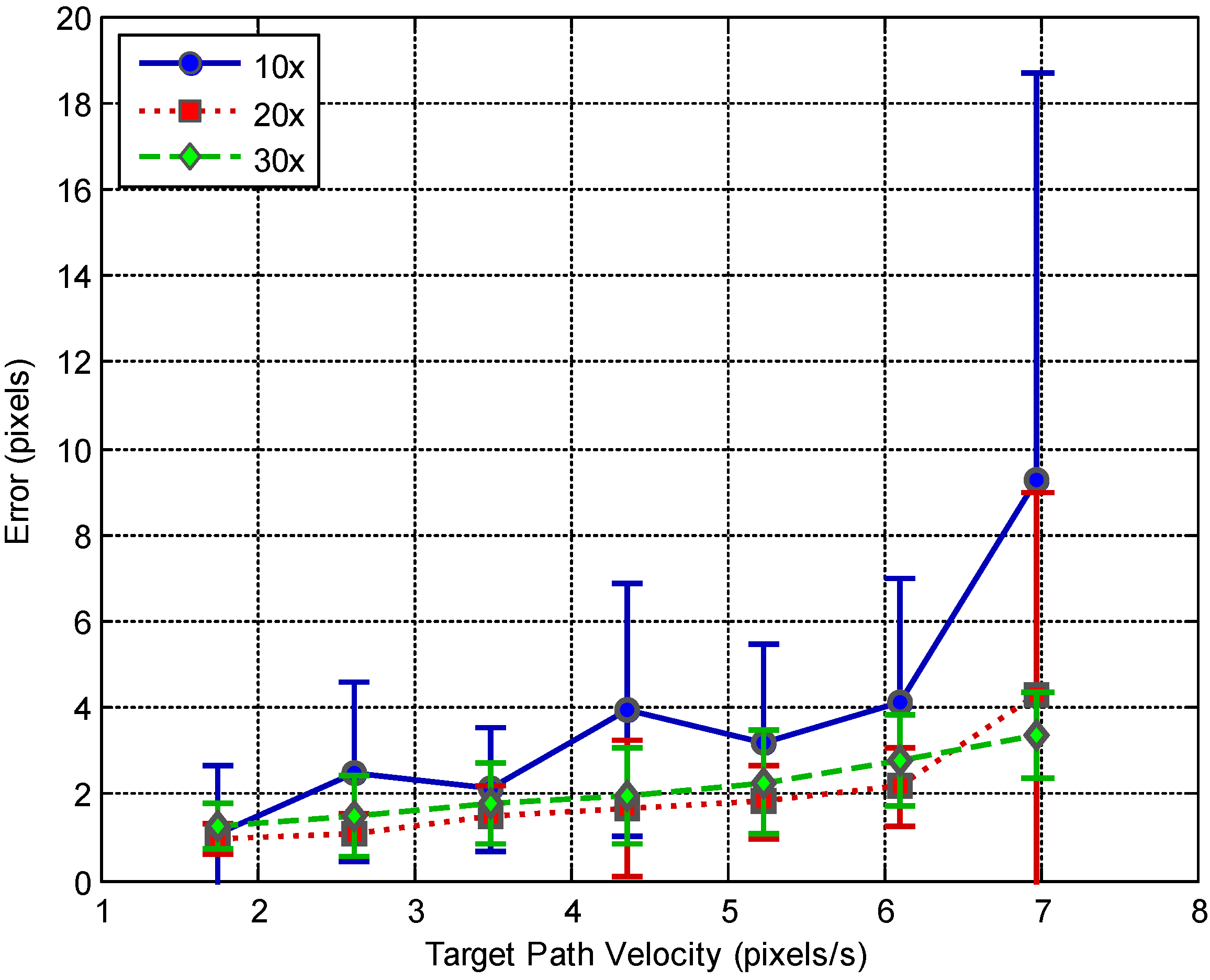
4.3.1. System Performance for Various Magnification and Target Speeds



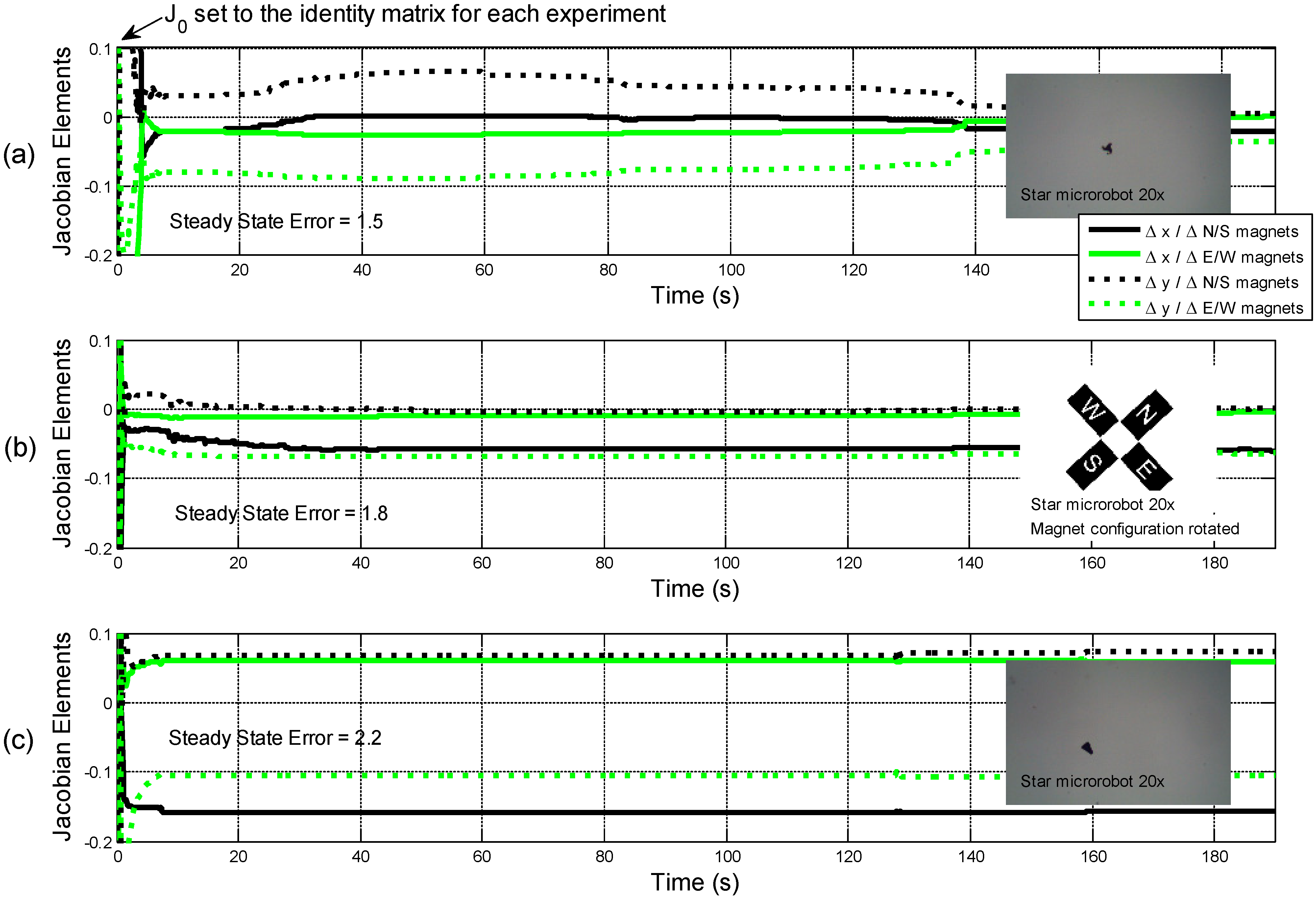
4.3.2. Tracking Performance for Various System Modifications

5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ishii, K.; Hu, W.I.; Ohta, A. Cooperative micromanipulation using optically controlled bubble microrobots. In Proceedings of IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 3443–3448.
- Hu, W.; Ishii, K.S.; Ohta, A.T. Micro-assembly using optically controlled bubble microrobots. Appl. Phys. Lett. 2011, 99. [Google Scholar] [CrossRef]
- Donald, B.R.; Levey, C.G.; McGray, C.D.; Paprotny, I.; Rus, D. An untethered, electrostatic, globally controllable mems micro-robot. Microelectromech. Syst. J. 2006, 15, 1–15. [Google Scholar] [CrossRef]
- Sul, O.J.; Falvo, M.R.; Taylor, R.M.; Washburn, S.; Superfine, R. Thermally actuated untethered impact-driven locomotive microdevices. Appl. Phys. Lett. 2008, 89. [Google Scholar] [CrossRef]
- Denisov, A.; Yeatman, E.M. Micromechanical actuators driven by ultrasonic power transfer. Microelectromech. Syst. J. 2014, 23, 750–759. [Google Scholar] [CrossRef]
- Bouchebout, S.; Bolopion, A.; Abrahamians, J.-O.; Régnier, S. An overview of multiple dof magnetic actuated micro-robots. J. Micro Nano Mechatron. 2012, 7, 97–113. [Google Scholar] [CrossRef]
- Jian, F.; Cho, S.K. Mini and micro propulsion for medical swimmers. Micromachines 2014, 5, 97–113. [Google Scholar] [CrossRef]
- Tamaz, S.; Gourdeau, R.; Mathieu, J.B.; Martel, S. Real-time mri-based control of a ferromagnetic core for endovascular navigation. IEEE Trans. Biomed. Eng. 2008, 55, 1854–1863. [Google Scholar] [CrossRef]
- Belharet, K.; Folio, D.; Ferreira, A. Control of a magnetic microrobot navigating in microfluidic arterial bifurcations through pulsatile and viscous flow. In Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 2559–2564.
- Pawashe, C.; Floyd, S.; Sitti, M. Two-dimensional autonomous microparticle manipulation strategies for magnetic microrobots in fluidic environments. IEEE Trans. Robot. 2012, 28, 467–477. [Google Scholar] [CrossRef]
- Diller, E.; Floyd, S.; Pawashe, C.; Sitti, M. Control of multiple heterogeneous magnetic microrobots in two dimensions on nonspecialized surfaces. IEEE Trans. Robot. 2012, 28, 172–182. [Google Scholar] [CrossRef]
- Diller, E.; Giltinan, J.; Sitti, M. Independent control of multiple magnetic microrobots in three dimensions. Int. J. Robot. Res. 2013, 32, 614–631. [Google Scholar] [CrossRef]
- Floyd, S.; Pawashe, C.; Sitti, M. An untethered magnetically actuated micro-robot capable of motion on arbitrary surfaces. In Proceedings of IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 419–424.
- Marino, H.; Bergeles, C.; Nelson, B.J. Robust electromagnetic control of microrobots under force and localization uncertainties. IEEE Trans. Autom. Sci. Eng. 2014, 11, 310–316. [Google Scholar] [CrossRef]
- Kummer, M.P.; Abbott, J.J.; Kratochvil, B.E.; Borer, R.; Sengul, A.; Nelson, B.J. Octomag: An electromagnetic system for 5-DoF wireless micromanipulation. IEEE Trans. Robot. 2010, 26, 1006–1017. [Google Scholar] [CrossRef]
- Bergeles, C.; Kratochvil, B.E.; Nelson, B.J. Visually servoing magnetic intraocular microdevices. IEEE Trans. Robot. 2012, 28, 798–809. [Google Scholar] [CrossRef]
- Ghanbari, A.; Chang, P.H.; Choi, H.; Nelson, B.J. Time delay estimation for control of microrobots under uncertainties. In Proceedings of 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Wollongong, Australia, 9–12 July 2013; pp. 862–867.
- Keuning, J.D.; DeVriessy, J.; Abelmanny, L.; Misra, S. Image-based magnetic control of paramagnetic microparticles in water. In Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011; pp. 421–426.
- Khalil, I.S.M.; Keuning, J.D.; Abelmann, L.; Misra, S. Wireless magnetic-based control of paramagnetic microparticles. In Proceedings of IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, Rome, Italy, 24–27 June 2012; pp. 460–466.
- Piepmeier, J.A.; Firebaugh, S.L. Visual servo control of electromagnetic actuation for a family of microrobot devices. In Proceedings of 2013 IEEE Workshop on Robot Vision (WORV), Clearwater Beach, FL, USA, 15–17 January 2013; pp. 209–214.
- Popa, D. Robust and reliable microtechnology research and education through the mobile microrobotics challenge [competitions]. IEEE Robot. Autom. Mag. 2014, 21, 8–12. [Google Scholar] [CrossRef]
- Purcell, E.M. Life at low reynolds number. Am. J. Phys. 1977, 45, 3–11. [Google Scholar] [CrossRef]
- Hosoda, K.; Asada, M. Versatile visual servoing without knowledge of true jacobian. In Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Munich, Germany, 12–16 September 1994; pp. 186–193.
- Jagersand, M.; Fuentes, O.; Nelson, R. Experimental evaluation of uncalibrated visual servoing for precision manipulation. In Proceedings of IEEE International Robotics and Automation Conference, Albuquerque, NM, USA, 20–25 April 1997; pp. 2874–2880.
- Piepmeier, J.A.; McMurray, G.V.; Lipkin, H. Uncalibrated dynamic visual servoing. IEEE Trans. Robot. Autom. 2004, 20, 143–147. [Google Scholar] [CrossRef]
- Sakar, M.S.; Steager, E.B.; Cowley, A.; Kumar, V.; Pappas, G.J. Wireless manipulation of single cells using magnetic microtransporters. In Proceedings of IEEE International Robotics and Automation (ICRA) Conference, Shanghai, China, 9–13 May 2011; pp. 2668–2673.
- Eleftheriou, E.; Falconer, D.D. Tracking properties and steady-state performance of RLS adaptive filter algorithms. IEEE Trans. Acoust. Speech Signal Proc. 1986, 34, 1097–1110. [Google Scholar] [CrossRef]
- MetalMUMPs. Available online: http://www.memscap.com/products/mumps/metalmumps (accessed on 19 September 2014).
- Firebaugh, S.L.; Piepmeier, J.A. The robocup nanogram league: An opportunity for problem-based undergraduate education in microsystems. IEEE Trans. Educ. 2008, 51, 394–399. [Google Scholar] [CrossRef]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Piepmeier, J.A.; Firebaugh, S.; Olsen, C.S. Uncalibrated Visual Servo Control of Magnetically Actuated Microrobots in a Fluid Environment. Micromachines 2014, 5, 797-813. https://doi.org/10.3390/mi5040797
Piepmeier JA, Firebaugh S, Olsen CS. Uncalibrated Visual Servo Control of Magnetically Actuated Microrobots in a Fluid Environment. Micromachines. 2014; 5(4):797-813. https://doi.org/10.3390/mi5040797
Chicago/Turabian StylePiepmeier, Jenelle Armstrong, Samara Firebaugh, and Caitlin S. Olsen. 2014. "Uncalibrated Visual Servo Control of Magnetically Actuated Microrobots in a Fluid Environment" Micromachines 5, no. 4: 797-813. https://doi.org/10.3390/mi5040797
APA StylePiepmeier, J. A., Firebaugh, S., & Olsen, C. S. (2014). Uncalibrated Visual Servo Control of Magnetically Actuated Microrobots in a Fluid Environment. Micromachines, 5(4), 797-813. https://doi.org/10.3390/mi5040797