1. Introduction
Chemical sensors based on the propagation of surface acoustic waves (SAWs) are usually based on a delay line or resonator configuration with the acoustic wave path covered by a membrane sensible to a specific target analyte. When the specific target molecule interacts with the membrane, such as antibody and microorganism, the membrane changes its mechanical properties, thus affecting the phase velocity and/or propagation loss of the wave. As a consequence, the device resonance frequency and/or attenuation changes can be used to quantify the sensors response. The performances of the electroacoustic sensors are affected by the behaviour of the thin membrane as well as by the device design. The membrane is required to be reversible, repeatable, stable in time and selective. The electroacoustic device to be used for sensing applications in liquid environment must involve the propagation of in-plane polarized modes since these modes do not radiate energy into the liquid. In this context, Love wave surface modes are promising platforms for biosensing applications. The Love wave is a shear horizontally (SH) polarized wave that propagates on the surface of a piezoelectric half-space or of a thin piezoelectric layer deposited on a semi-infinite substrate. The SH polarization ensures a weak acoustic energy loss in the liquid phase contacting the device surface, while the latter ensures a strong energy confinement in the piezoelectric layer. Love wave sensors have been attracting the interest of many researchers since the early 1990s [
1,
2,
3] due to their remarkable features: the lower acoustic wave velocity of the layer results in the acoustic wave being guided through the layer itself, resulting in minimal acoustic losses into the bulk of the substrate or into the liquid contacting the sensor surface. Moreover, improved sensor performances can be achieved by choosing a proper layer thickness, which increases the sensitivity of the device towards changes in physical properties at its surface, including mass loading.
In this study, we theoretically studied the propagation of Love wave along the surface of some piezoelectric substrates (AlN, InN, ZnO, GaN, ST quartz): the phase velocity and the electroacoustic coupling coefficient (K2) were calculated for different c-axis tilt angles with respect to the surface normal. In order to increase the Love wave velocity and K2 with respect to those obtained for single material substrates, we investigated a dispersive structure consisting in a thin piezoelectric ZnO layer on top of the surface of a semi-infinite BN substrate. The ZnO layer has its c-axis inclined onto the surface while the BN has its c-axis normal to the free surface. The K2 and velocity dispersion curves, and the gravimetric sensitivities were calculated for different Love modes, in order to compare the overall behavior of the sensors based on different Love modes. Finally, the first Love mode attenuation and relative velocity shift due to the presence of a liquid (water) contacting the device surface were calculated for different ZnO layer thicknesses, thus confirming that the sensor behavior can be enhanced by proper choice of material parameters (i.e., types and thicknesses) of the layered waveguide structure.
2. Love Wave Propagating Along a Piezoelectric Half-Space
The propagation of the Love wave can be excited and detected by means of interdigitated transducers (IDTs), as well as for the SAWs. Referring to a coordinate system with
x1 and
x3 parallel to the wave propagation direction and normal to the substrate surface, respectively, the electrically coupled Love wave requires the piezoelectric constants
e16 and, or
e36 to be different from zero. A (0002) oriented piezoelectric material of the hexagonal system (class 6 mm) has no piezoelectric coefficients that couple to shear deformation, hence the excitation of shear waves can be obtained by tilting the
c-axis orientation by an angle μ from the normal, as shown in
Figure 1.
As a result, the electric field is coupled only with the particle motion in the shear horizontal (SH) direction,
U2.
U2 is maximum at the free surface of the substrate and remains constant for about one wavelength in depth, and then it decreases asymptotically. Therefore the electroacoustic coupling coefficient is affected by the
c-axis inclination angle from the vertical as well as by the wave propagation direction. The phase velocity and
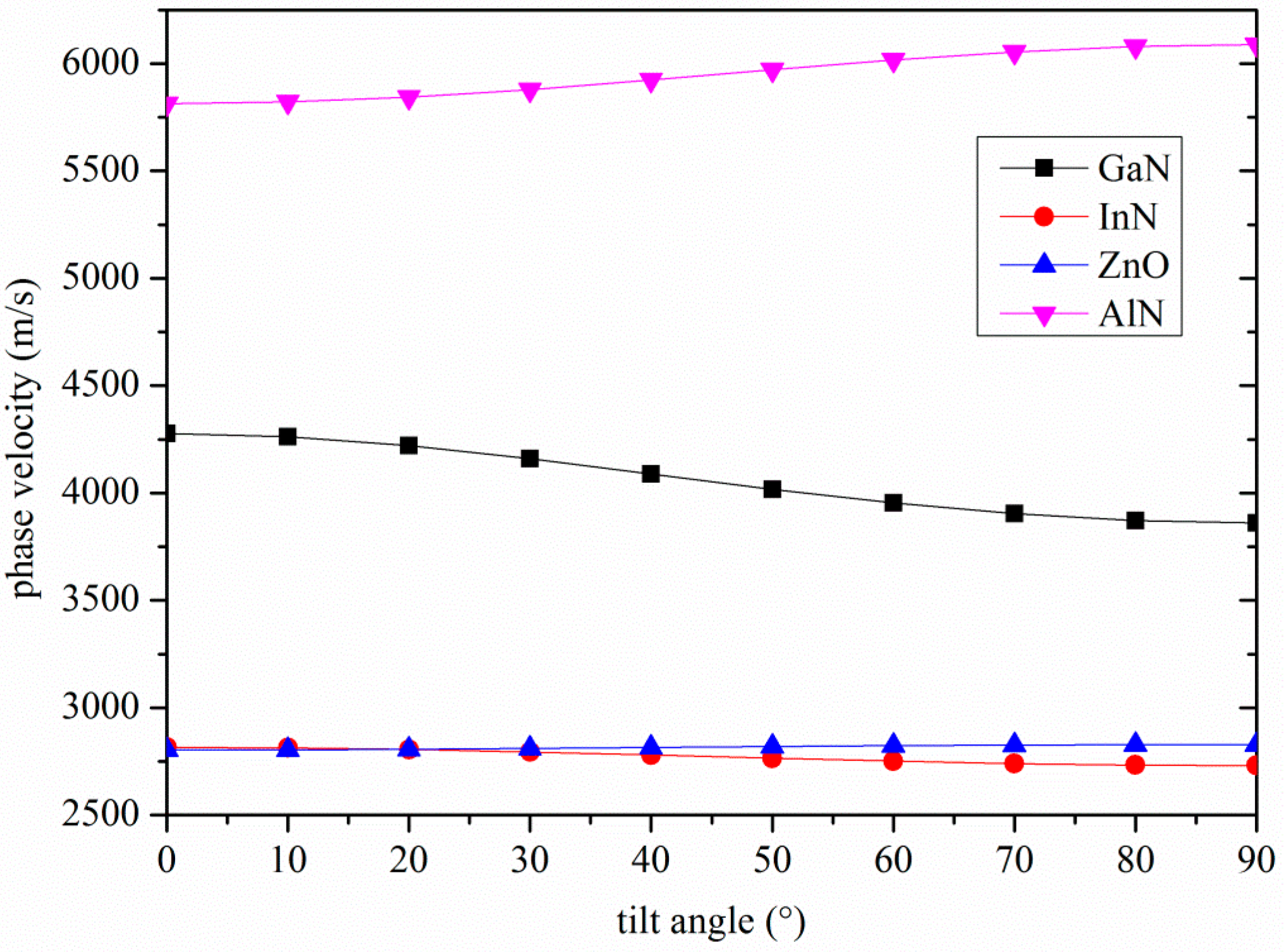
K2 of the Love wave travelling along the surface of some piezoelectric substrates were calculated by using a Matlab routine in the lossless approximation; the material data (mass density, elastic, piezoelectric, and dielectric constants) are referred to in [
4,
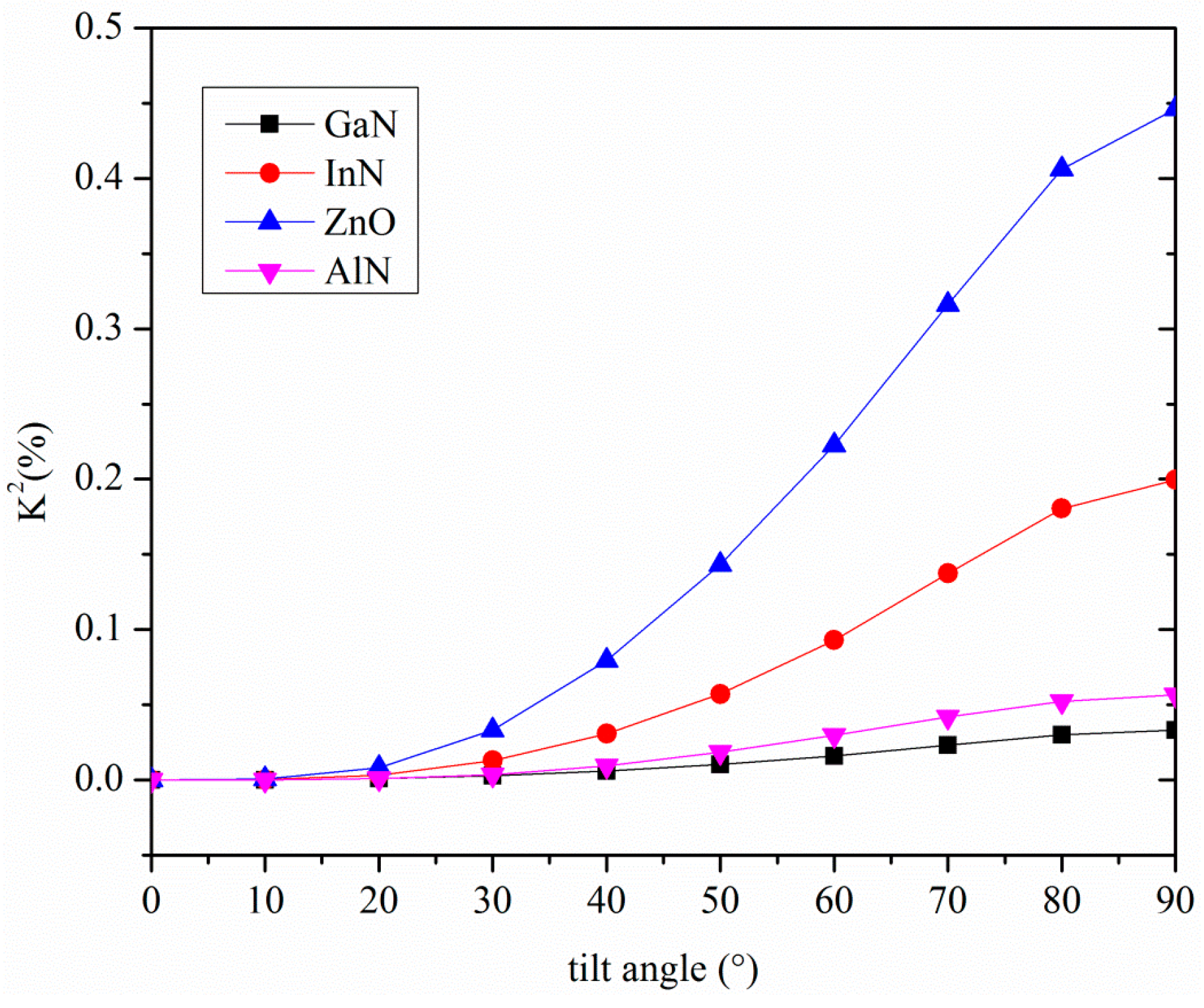
5]. By tilting the
c-axis of the AlN, InN, ZnO and GaN piezoelectric half-spaces with respect to the surface normal, the phase velocity of the Love wave changes, as well as the coupling coefficient, as shown in
Figure 2 and
Figure 3.
Figure 1.
The laboratory coordinate system (x1, x2 and x3) and the propagating medium crystallographic axis (x, −y and z ≡ c); μ is the c-axis tilt angle respect to x3.
Figure 1.
The laboratory coordinate system (x1, x2 and x3) and the propagating medium crystallographic axis (x, −y and z ≡ c); μ is the c-axis tilt angle respect to x3.
Figure 2.
The phase velocity of the Love wave travelling along the x propagation direction of AlN, GaN, InN and ZnO substrates vs. the c-axis tilt angle.
Figure 2.
The phase velocity of the Love wave travelling along the x propagation direction of AlN, GaN, InN and ZnO substrates vs. the c-axis tilt angle.
Figure 3.
The K2 of the Love wave travelling along the x propagation direction of AlN, GaN, InN and ZnO substrates vs. the c-axis tilt angle.
Figure 3.
The K2 of the Love wave travelling along the x propagation direction of AlN, GaN, InN and ZnO substrates vs. the c-axis tilt angle.
A piezoelectric material widely used for the implementation of Love wave based sensors [
6,
7,
8,
9] is the ST-Y quartz where the wave propagation direction is orthogonal to the crystalline
x axis direction in order to allow the excitation of purely shear polarized modes by means of the IDTs: 4991 m/s is the wave velocity and 0.018% is the
K2. The weak piezoelectric coupling of this material can be improved by covering the free surface of the quartz substrate with a thin SiO
2 layer. This layer plays the twofold role of increasing the electroacoustic coupling coefficient, while trapping the acoustic energy near the surface of the substrate.
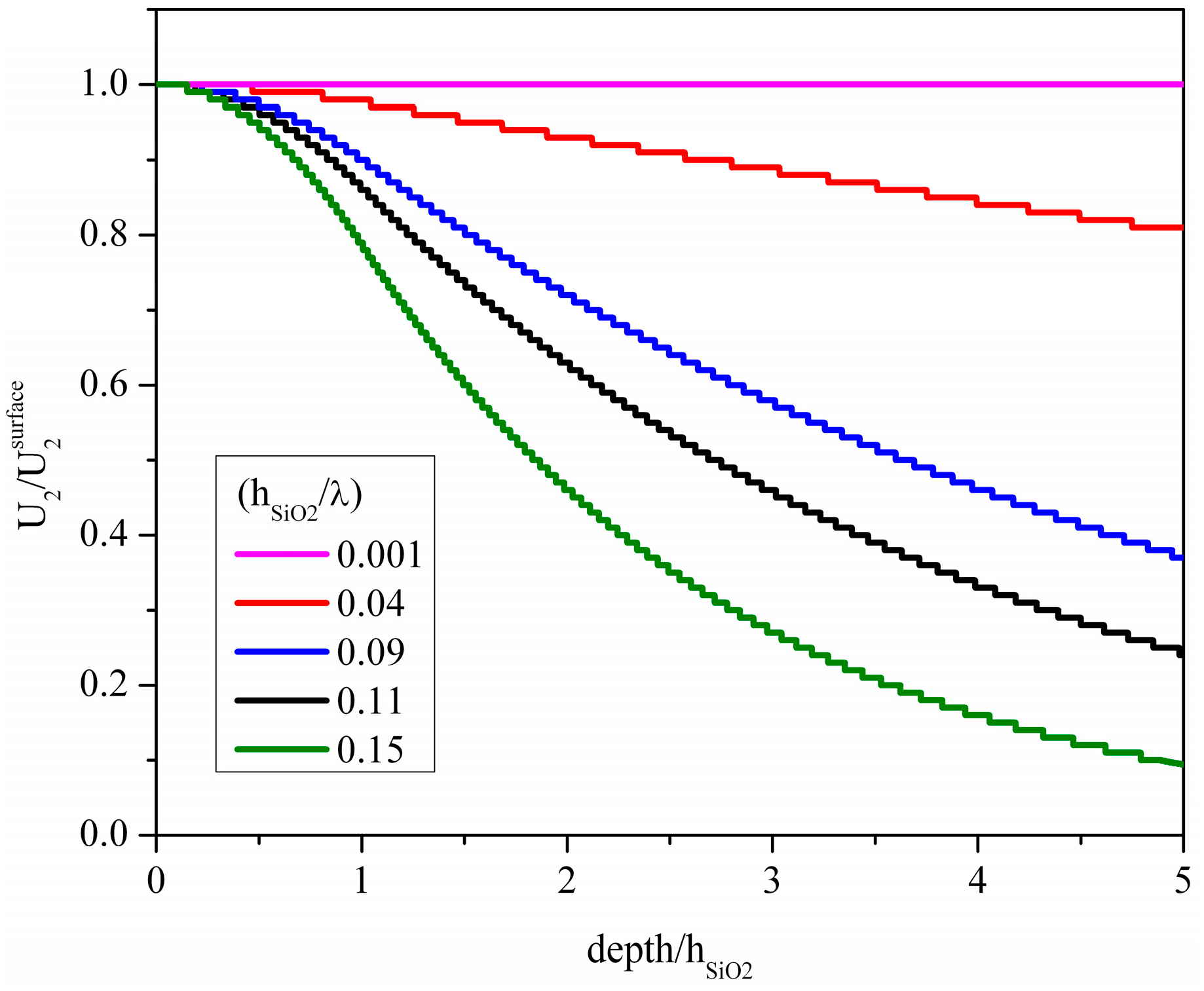
Figure 4 shows the particle displacement component normalized to its surface value,
U2/
U2surface,
vs. the depth of the SiO
2/quartz propagating medium; the running parameter is the SiO
2 film thickness normalized to the acoustic wavelength (
hSiO2/λ). The abscissa of the graph has been normalized to
hSiO2 to make visible how the layer thickness affects the acoustic field at the layer/substrate interface (depth/
hSiO2 equal to 1) and inside the substrate. With increasing SiO
2 layer thickness, more and more energy is trapped inside the layer and, for
hSiO2/λ > 0.07, the displacement component value at the quartz surface starts becoming ever lower, while it remains equal to 1 at the layer free surface. As described in [
7,
10], to cite just a few, the SiO
2 layer thickness affects the mass sensitivity of the sensor to the viscous liquid characteristics, as well as the insertion loss, temperature coefficient of oscillation frequency and frequency noise.
Figure 4.
The normalized particle displacement component of the Love wave vs. the acoustic wave penetration depth normalized to the SiO2 layer thickness hSiO2; the SiO2 thickness to wavelength ratio, hSiO2/λ, is the running parameter.
Figure 4.
The normalized particle displacement component of the Love wave vs. the acoustic wave penetration depth normalized to the SiO2 layer thickness hSiO2; the SiO2 thickness to wavelength ratio, hSiO2/λ, is the running parameter.
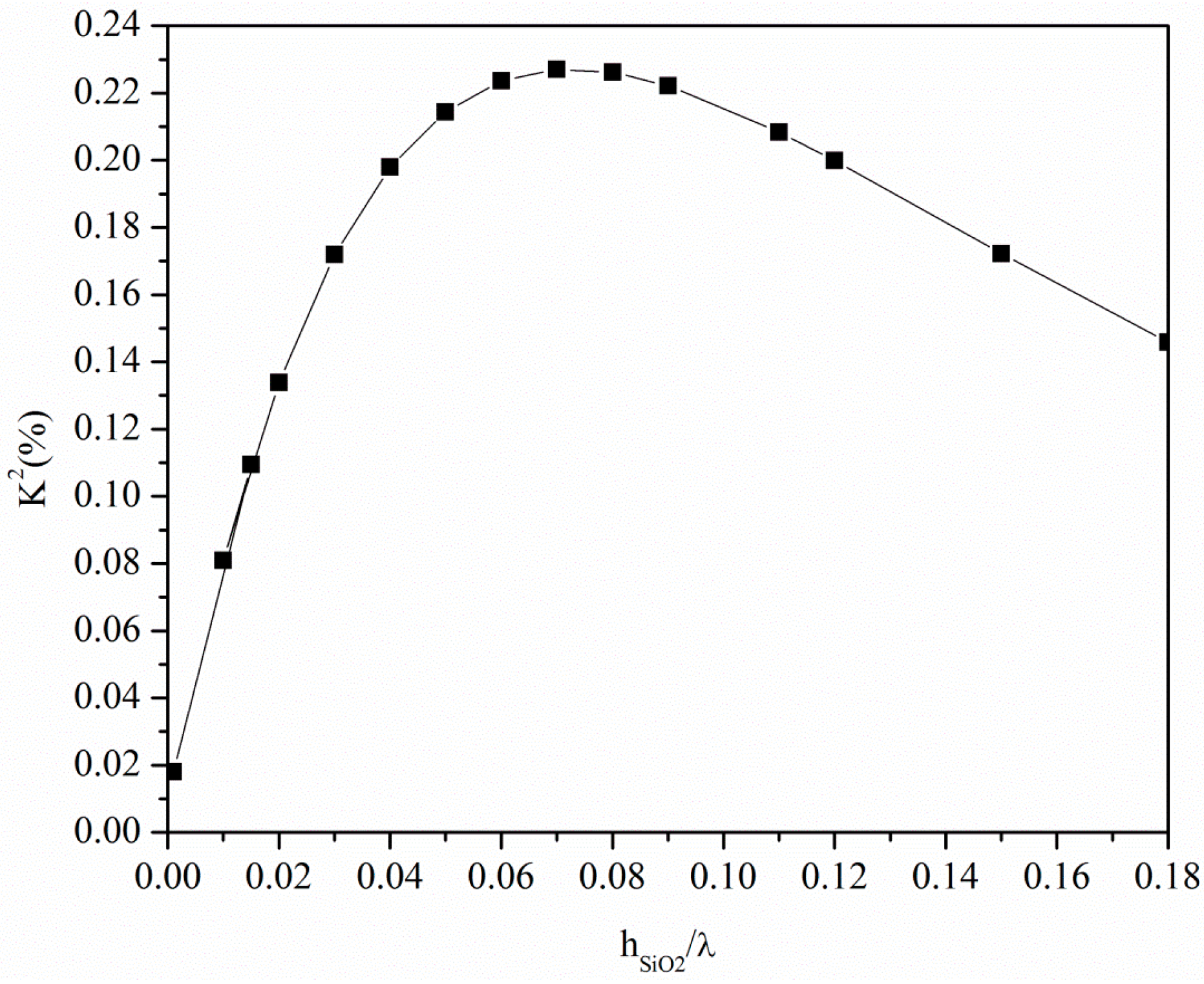
The presence of the SiO
2 layer affects the acoustic field distribution as well as the
K2 of the SiO
2/ST-quartz substrate, as shown in
Figure 5. The
K2 improves with increasing layer thickness up to the threshold value
hSiO2/λ = 0.07, while it decreases for higher layer thicknesses. The velocity as well as the
K2 values of the SiO
2/quartz substrate are much lower than those referred to the
c-axis inclined AlN, while only the
K2 of the GaN, InN and ZnO bare substrates is competitive with that of the SiO
2/quartz substrate. Among these materials, AlN is the fastest while ZnO ensures the highest
K2 value. Moreover, these piezoelectric materials can be grown in thick film form onto non-piezoelectric substrates, such as silicon, and, provided that their thickness is greater than the acoustic wavelength, are suitable for the implementation of Love-wave-based sensor platforms for applications in liquid environments.
Figure 5.
The K2 of the ST-Y quartz vs. the SiO2 normalized thickness.
Figure 5.
The K2 of the ST-Y quartz vs. the SiO2 normalized thickness.
3. Love Modes Propagating Along a Piezoelectric Layer onto a Non Piezoelectric Half-Space
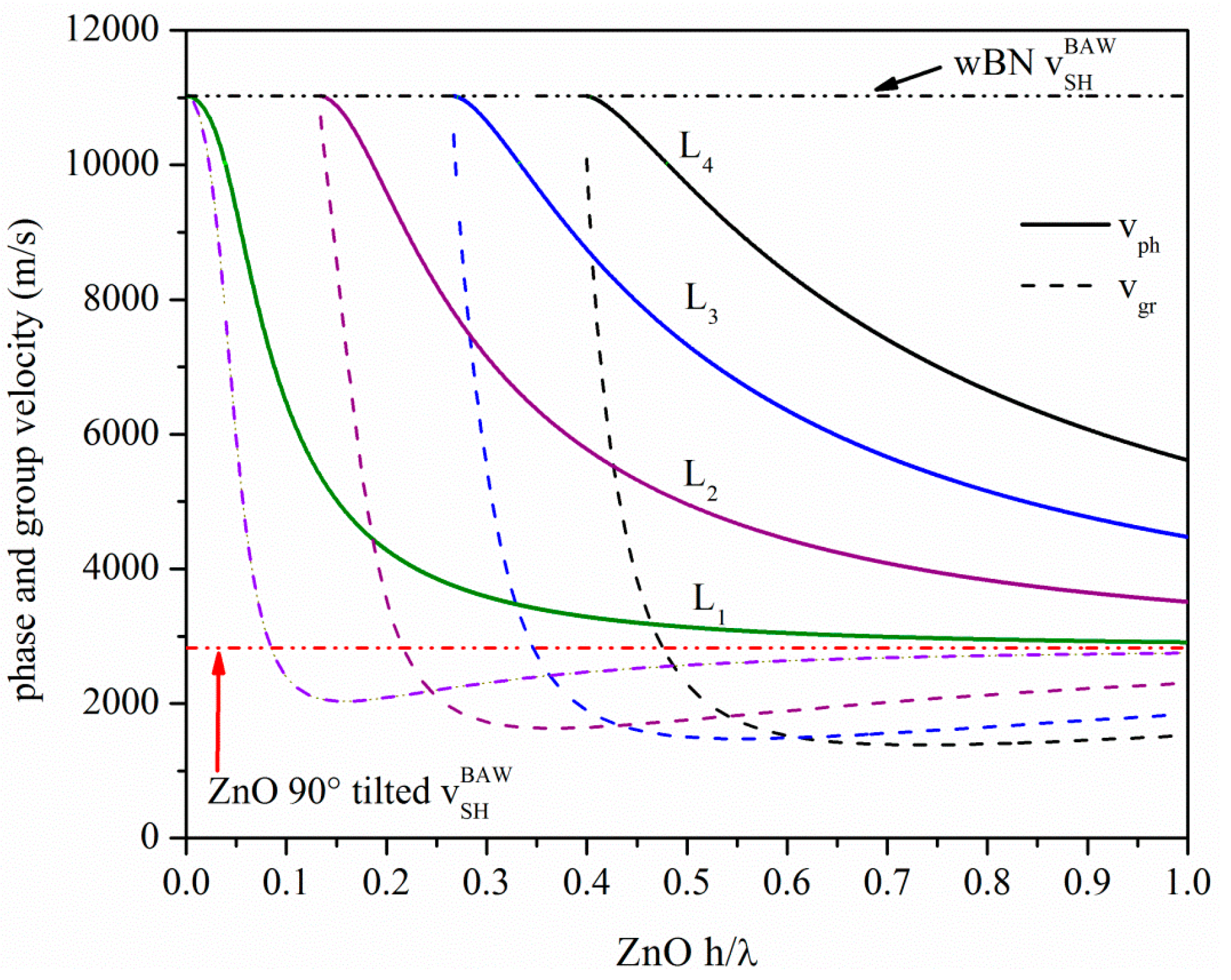
Dispersive Love wave devices can also be developed which consist of a thin wave guide layer on top of the surface of a substrate. The essential condition for the propagation of the Love wave along a layered medium is that the shear bulk wave velocity (SHBAW) in the layer is smaller than that in the substrate,
i.e., the layer loads the substrate. As a result, multiple Love modes propagate which involve only displacements perpendicular to the sagittal plane. The phase velocity
vph of the first mode becomes equal to the SHBAW velocity of the substrate with decreasing layer thickness, while it asymptotically reaches the SHBAW velocity of the layer with increasing layer thickness. The higher order Love modes have a cut off when their
vph equals the SHBAW velocity of the substrate and at the cut off the group velocity
vgr equals
vph. Unlike the
vph, the
vgr dispersion curve of each mode has infinite slope.
vph and
vgr approach asymptotically the SHBAW velocity of the layer with increasing the layer thickness, as illustrated by the dispersion curves in
Figure 6 for a
c-axis inclined ZnO film on a semi-infinite wurtzite BN substrate. The
vgr was calculated from the
vph by the following formula:
, being λ the acoustic wavelength and
h the layer thickness. In
Figure 6, the velocities of the SHBAW of the wz-BN and of the
c-axis inclined ZnO are shown as well. Many authors have demonstrated the feasibility of the growth of ZnO layers with an in-plane
c-axis onto different substrates, such as on R plane sapphire [
11,
12], onto Au/SiO
2 substrate [
13], onto Au [
14] on an indium tin oxide (ITO) on quartz substrate [
15], and on Al polycrystalline films [
16], to name just a few. wz-BN films are currently grown by sputtering (DC or RF) and by hollow cathode arc evaporation apparatus on Si(001) and Si(111), respectively and by chemical vapor deposition: at the present, the growth of BN presents a viable route towards large-scale manufacturing of BN substrates [
17,
18,
19,
20]. Thus, the feasibility of the proposed ZnO
c-axis inclined/wz-BN acoustic waveguide is reliable and compatible with semiconductor processing techniques, provided that the BN thickness is greater than the acoustic wavelength. Such multilayer structure offers the advantage of providing the monolithic integration of the device with the signal processing electronics. Other combinations of materials can be explored also to improve the thermal stability (by choosing materials with temperature coefficient delay opposite in sign) [
21] and resistance to harsh environments (choosing materials able to survive at high temperatures and in chemically aggressive environments).
Figure 6.
The phase and group velocity dispersion curves of the Love modes travelling along the x propagation direction of c-axis inclined ZnO/wz-BN.
Figure 6.
The phase and group velocity dispersion curves of the Love modes travelling along the x propagation direction of c-axis inclined ZnO/wz-BN.
In designing a Love wave device, an important feature to be obtained is low insertion loss, which can be achieved by selecting a material with a large
K2. The value of
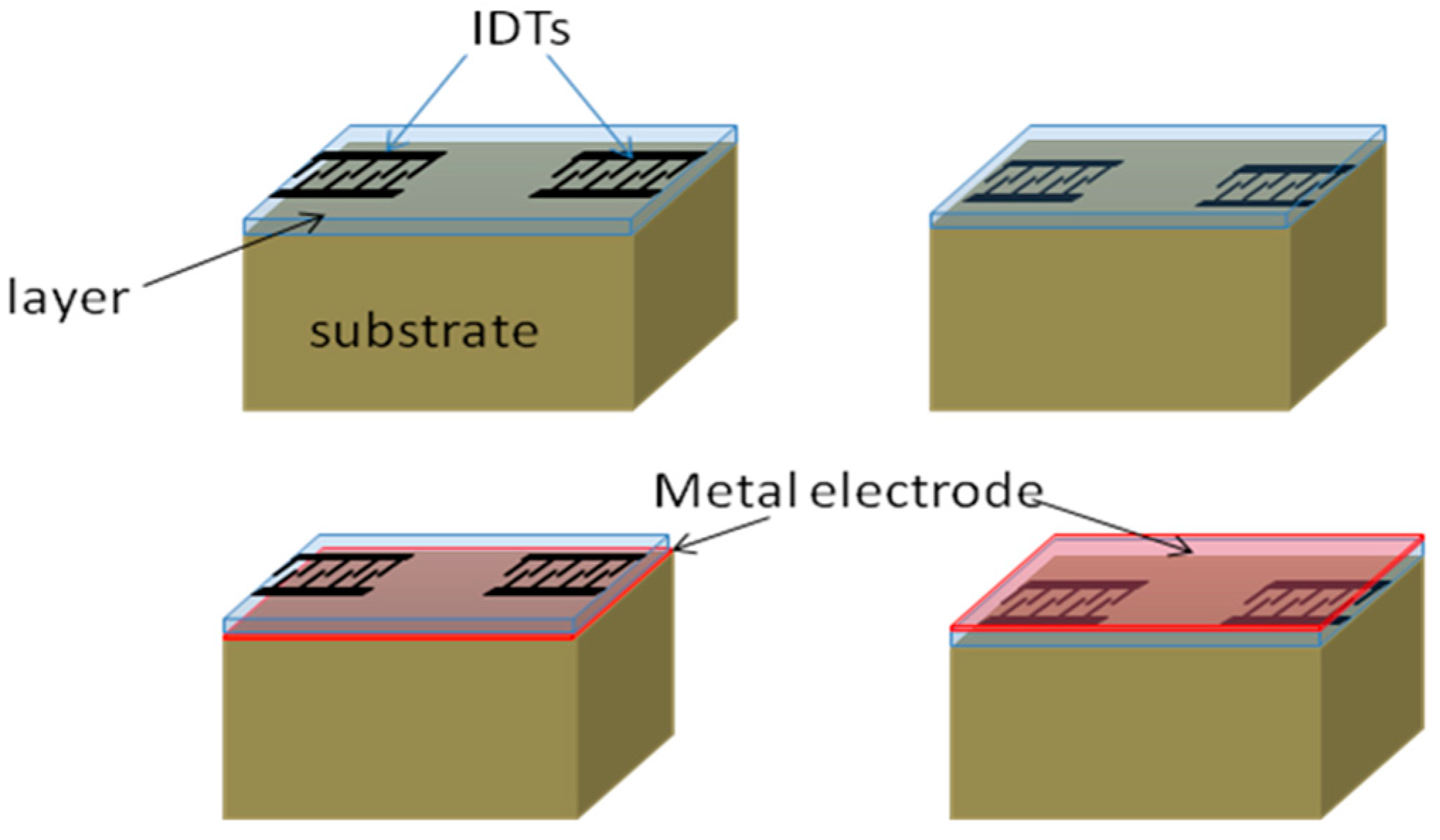
K2 is directly related to the IDT electrical-to-mechanical energy conversion efficiency; hence, it determines the radiation resistance of the transducer that is fabricated on the substrate and the piezoelectric guiding layer. The layer/substrate combination allows the implementation of four different coupling configurations, shown in
Figure 7, with the IDTs placed on one of the ZnO layer surfaces, with or without a floating electrode on the opposite one. The configuration called substrate/film/transducer (SFT) refers to a coupling structure with the IDTs positioned on the ZnO free surface: when a floating metallic plane (M, metal) is placed at the ZnO/BN interface, the configuration is called SMFT. The configuration called substrate/transducer/film (STF) refers to a coupling structure with the IDTs positioned at the ZnO/BN interface: when the metallic plane is positioned at the ZnO free surface, the configuration is called STFM.
Figure 7.
The four different coupling configurations.
Figure 7.
The four different coupling configurations.
For SAWs the
K2 can be defined in terms of the piezoelectric coefficient, elastic constants and dielectric permittivity,
K2 =
e2/
cε, being the tensor subscripts dropped: the appropriate values of these constants depend on the crystallographic orientation of the piezoelectric material [
22]. A simpler method for calculating the efficiency of excitation of acoustic surface waves by means of interdigital transducers [
23] is based on the calculation of the wave velocity change due to a change in the electric field boundary conditions. When a thin, massless, perfectly conducting metal film is deposited on the surface of a piezoelectric layer, the potential and the longitudinal electric field at the piezoelectric surface layer are zero, and the wave velocity is reduced by an amount which can be regarded as a measure for the coupling strength between the wave and the metal surface electrode. The higher the velocity change, the higher the coupling to an electrode grating transducer which responds mainly to the tangential field. For piezoelectric materials with a weak piezoelectric coupling coefficient, this quantity can be written to a good approximation [
24] as
K2 ≈ 2·Δ
v/
vf = 2·(
vf −
vm)/
vf, where
vm and
vf are the velocities calculated in the metalized and free ZnO boundary condition. For the layered structures depicted in
Figure 7, the IDTs and the metal plane can be positioned onto one of the two surfaces of the layer, thus the effects of four different electrical boundary conditions at the ZnO interfaces must be considered in the calculation of the phase velocity and hence of the
K2. By denoting as
vij (for
i, j =
m, f) the wave velocity referred to the electrical boundary conditions of the lower and upper layer surface, the following approximated formulas were used to calculate the coupling constant of the four structures:
The
K2 dispersion curves were theoretically calculated for the first four Love modes propagating in the four different coupling structures, as shown in
Figure 8. The mechanical effect of the metallization was ignored as the metallization is assumed to be infinitely thin. As can be seen from
Figure 8, the Love modes propagating along the dispersive structure are highly sensitive to the electrical boundary conditions.
With increasing the Love mode order, ever decreasing K2 values can be reached by the four coupling configurations: the SMFT of the first mode reaches the highest K2 value since the metallization on the ZnO side opposite the IDTs strongly enhances the vertical electric field in the ZnO layer.
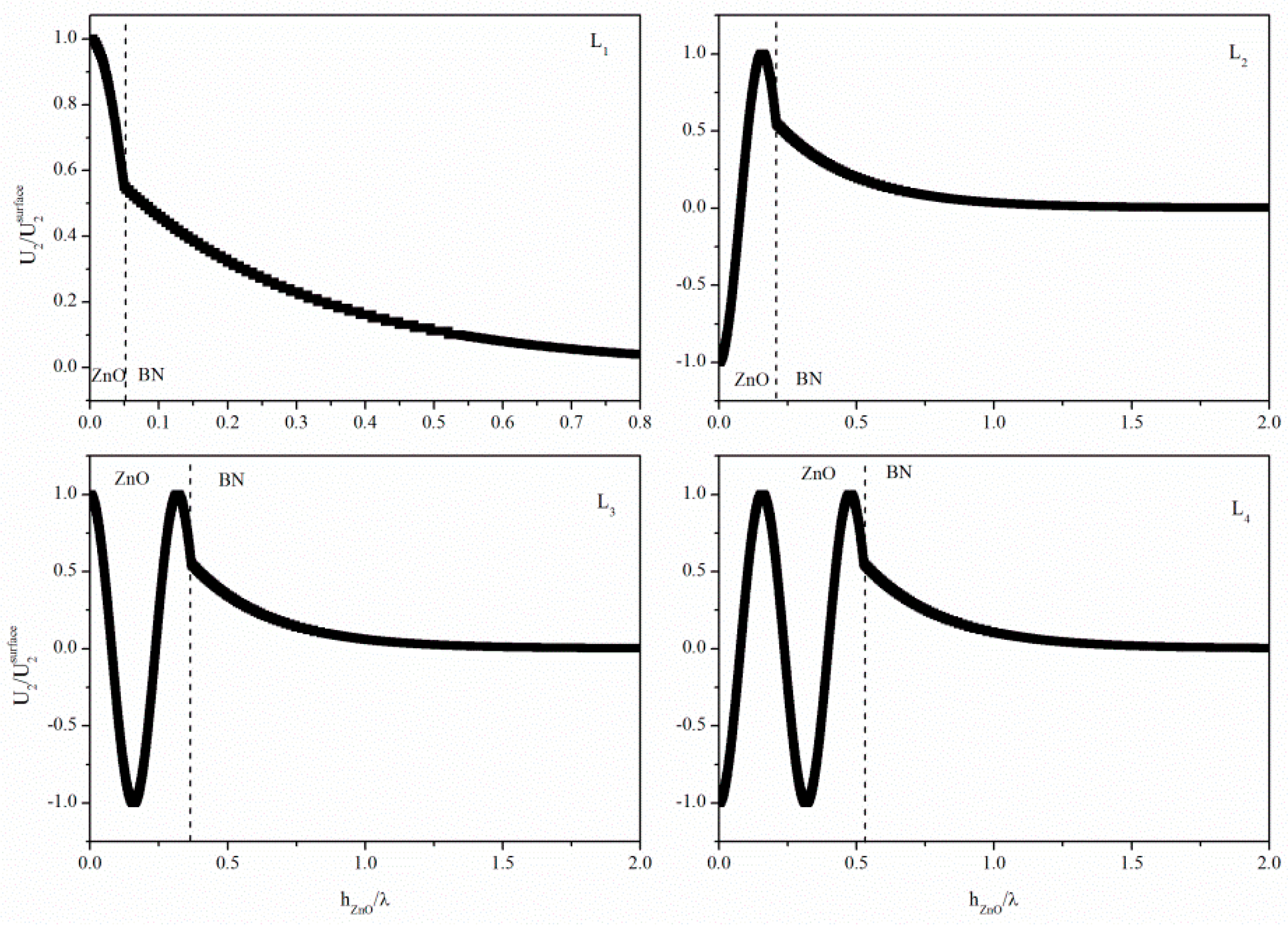
Figure 9 shows the displacement component profile for the first four Love modes travelling at a common velocity of 9318 m/s along different ZnO layer thicknesses (
h/λ = 0.050, 0.209, 0.369 and 0.528, respectively). As can be seen, the displacement in the ZnO layer varies sinusoidally while the displacement in the BN substrate has a simple exponential decay with depth below the interface for all the modes. The slope of the curve of the displacement amplitude
vs. depth is zero at the free interface for all Love modes. Every Love mode is suitable for liquid sensing applications as the particle displacement component is at the maximum at the free surface that contacts the liquid.
Figure 8.
The K2 dispersion curves of the four coupling configurations calculated for the first four Love modes propagating along 90° tilted ZnO film onto BN substrate.
Figure 8.
The K2 dispersion curves of the four coupling configurations calculated for the first four Love modes propagating along 90° tilted ZnO film onto BN substrate.
Figure 9.
The particle displacement component of the first four Love modes travelling at a common velocity of 9318 m/s along different ZnO layer thicknesses (h/λ = 0.050, 0.209, 0.369 and 0.528, respectively).
Figure 9.
The particle displacement component of the first four Love modes travelling at a common velocity of 9318 m/s along different ZnO layer thicknesses (h/λ = 0.050, 0.209, 0.369 and 0.528, respectively).
5. Conclusions
Love sensors are likely to see increased competition from devices such as Lamb wave sensors for gravimetric applications in liquid media; the acoustic plate modes have the disadvantage of requiring bulk micromachining, whereas the formers can be fabricated using well established surface micromachining. Additionally, Love wave devices are more robust, can operate in a harsh environment and have operation capability on a wireless platform, which makes it possible to operate these devices from a remote location. There is a wide range of combinations of materials of which the devices can be made to improve the velocity (choosing fast materials), the electroacoustic coupling efficiency (choosing materials with a high piezoelectric coupling), the thermal stability (by choosing materials with a temperature coefficient delay opposite in sign) and resistance to harsh environments (choosing materials able to survive at high temperatures and in chemically aggressive environments). A proper sensor device design is required to trade off mass sensitivity as well as electromechanical coupling, which affects device size and insertion loss. Since there is no material combination which outperforms all others in these two areas, the research for substrate and layer configurations with favourable properties is still in progress. In the present paper we studied conventional piezoelectric substrates, such as ST-Y quartz, and unconventional piezoelectric substrates, such as c-axis tilted AlN, ZnO, GaN and InN, to be used as Love wave propagating media suitable for the implementation of high-frequency, enhanced-coupling sensor devices. Our theoretical study demonstrates that Love mode devices on c-axis inclined ZnO/BN substrate can offer remarkable performance, with qualities such as high velocity (and hence operating frequency), quite good K2 (4%), and high sensitivity. In terms of feasibility, this acoustic waveguide is reliable and compatible with semiconductor processing techniques, thus offering the advantage of providing the monolithic integration of the device with the signal processing electronics.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

