1. Introduction
Micro-gyroscopes have the advantages of small size, low cost, and suitability for mass production. The micro-gyroscopes can be used in the automotive industry to make anti-rollover systems, antiskid controls, and electronic stability controls [
1]. Various applications for consumer equipment range from camera stabilization, cell phone stabilization, virtual reality, and inertial mouse to navigation for portable electronics [
2]. The micro-gyroscopes have further applications in robotics and military equipment including inertial navigation for aeronautics and astronautics, and platform stabilization [
3]. Mostly, the micro-gyroscopes have vibrating structures suspended above a silicon substrate. Among them, the tuning fork gyroscope (TFG) with an electrostatic drive and capacitive-type sensing is mostly preferred thanks to its reported potential capabilities and advantages such as common-mode rejection and low power consumption [
4,
5,
6,
7,
8,
9]. Generally, for vibratory gyroscopes, the mechanical quality factor (
Q) of the operating modes is a key performance parameter. In order to achieve higher sensitivity and better rate resolution, the micro-gyroscope needs to be designed with a large sense-mode
Q. A large drive-mode
Q is also necessary for improving the bias stability as well as ensuring large drive amplitudes using small drive voltages [
10].
The overall mechanical
Q for an operating mode relates to energy-dissipation mechanisms in the TFG such as air damping (
QAir), dissipation through the substrate (
QSupport), thermo-elastic damping (
QTED), and surface loss (
QSurface) [
11], and it is expressed by 1/
Q = 1/
QAir + 1/
QSupport +1/
QTED + 1/
QSurface. Among them, the effect of air damping is considered as the primary loss mechanism for the device, which operates in atmospheric conditions.
In a typical capacitive detection gyroscope, where a comb-type detection structure is commonly used, the squeeze-film air damping and the slide-film air damping between the proof masses and the substrate usually result in a low
Q-factor [
12,
13]. This requires a costly vacuum packaging solution to achieve better sensitivity [
14]. Developing high-performance micro-gyroscopes operating at atmospheric pressure is an effective means to reduce the cost.
In recent years, different structure designs have been pursued to improve the performance of micro-gyroscope operating in atmospheric conditions. Geen et al. in Analog Devices developed a single-chip surface micro-machined integrated gyroscope with an atmospheric hermetic package [
15]. This device attained a root Allan variance of 50°/h with a full scale range of ±150°/s. Alper et al. reported a silicon-on-insulator microelectromechanical systems (MEMS) gyroscope which operates at atmospheric pressure with a short-term bias stability of 1.5°/s [
16]. Che et al. reported on the high
Q-value for an electrostatic-driven tuning fork micro-machined gyroscope with a bar structure that operates at atmospheric pressure [
17]. A single-crystal silicon-based lateral axis tuning fork gyroscope (TFG) with a vertically torsional sensing comb was developed by Guo et al. [
12]. However, the quality factor of the sensing mode in this study was rather low due to the squeeze-film air damping between the proof mass and the glass substrate. Hu et al. reported on the sensitivity improvement of a slot-structure micro-gyroscope working in atmospheric conditions through a tunable electrostatic spring constant attained by the triangular-shaped fixed electrodes [
18].
In this study, we aim at improving the sensitivity of the angular rate sensor by increasing the quality factor of the driving and sensing modes. We propose a capacitive-type z-axis tuning fork gyroscope, which has a freestanding architecture. In order to enhance the sensitivity of the tuning fork gyroscope, the slide-film air damping in the gap between the proof masses and the substrate is eliminated by removing the substrate part underneath the device. The optimal design of the tuning fork gyroscope is carried out by simulating its mechanical behavior with the finite element method (FEM) using ANSYS software. The proposed z-axis tuning fork micro-gyroscope has been fabricated and characterized.
2. Design and Simulation
The proposed TFG architecture is shown in
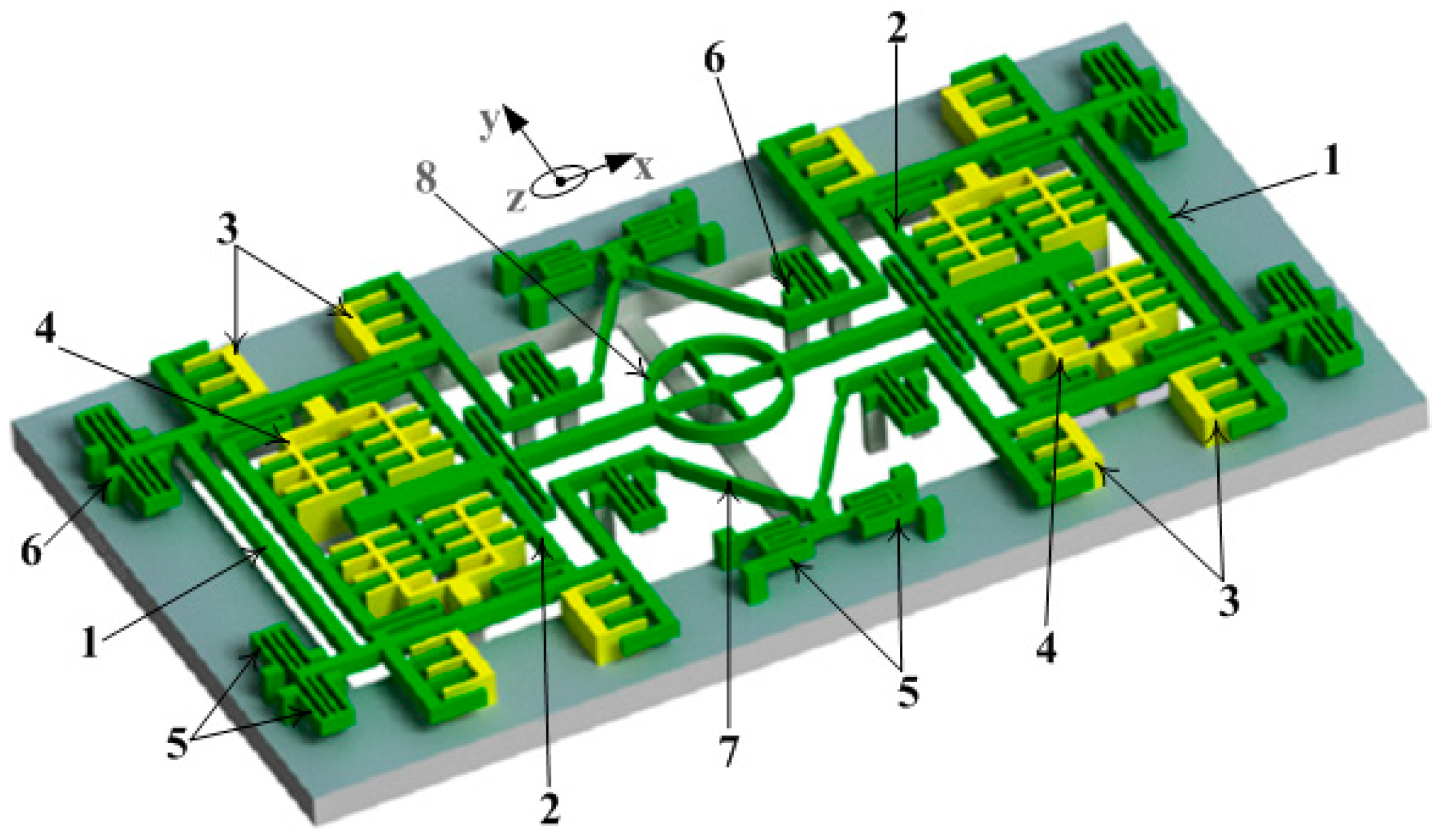
Figure 1.
The TFG comprises two proof masses. Each proof mass has an outer frame (1) for driving and an inner one (2) for sensing. The set of driving comb electrodes (3) is attached to the outer frame. This design is such that the masses can oscillate in opposite directions along the x-axis under applied electrostatic force in driving mode. The motion of this set obeys the slide-film mechanism, offering highly stable actuation. A pair of parallel plate sense electrode sets (4) is placed symmetrically within each inner frame. Upon the rotation, the Coriolis force excites this frame along an in-plane motion, such that the differential capacitance can be detected. In the design, the double folded beams (5), which have their fixed ends connected to the substrate by anchors (6), are employed for the suspension of the frames. The suspension of the frames is designed to allow the structure to oscillate in two orthogonal modes. In the design, the single folded beams are utilized to join the inner frame with the outer one such that the motion in the orthogonal direction can be easily sensed.
The TFG is operated in the anti-phase drive mode, which excites the masses oscillated in opposite directions. To achieve an anti-phase oscillation in the driving mode, the two masses are coupled with a diamond-shaped coupling spring formed by four linear beams (7). The anti-phase vibration for the sensing mode is guaranteed by using a self-rotation ring (8), which is positioned inside the diamond-shaped coupling spring. This design can be used to stiffen the in-phase resonance of the structure, while leaving the anti-phase compliant. Based on this design the noise is decreased, resulting in the improvement of the sensitivity of the TFG [
4].
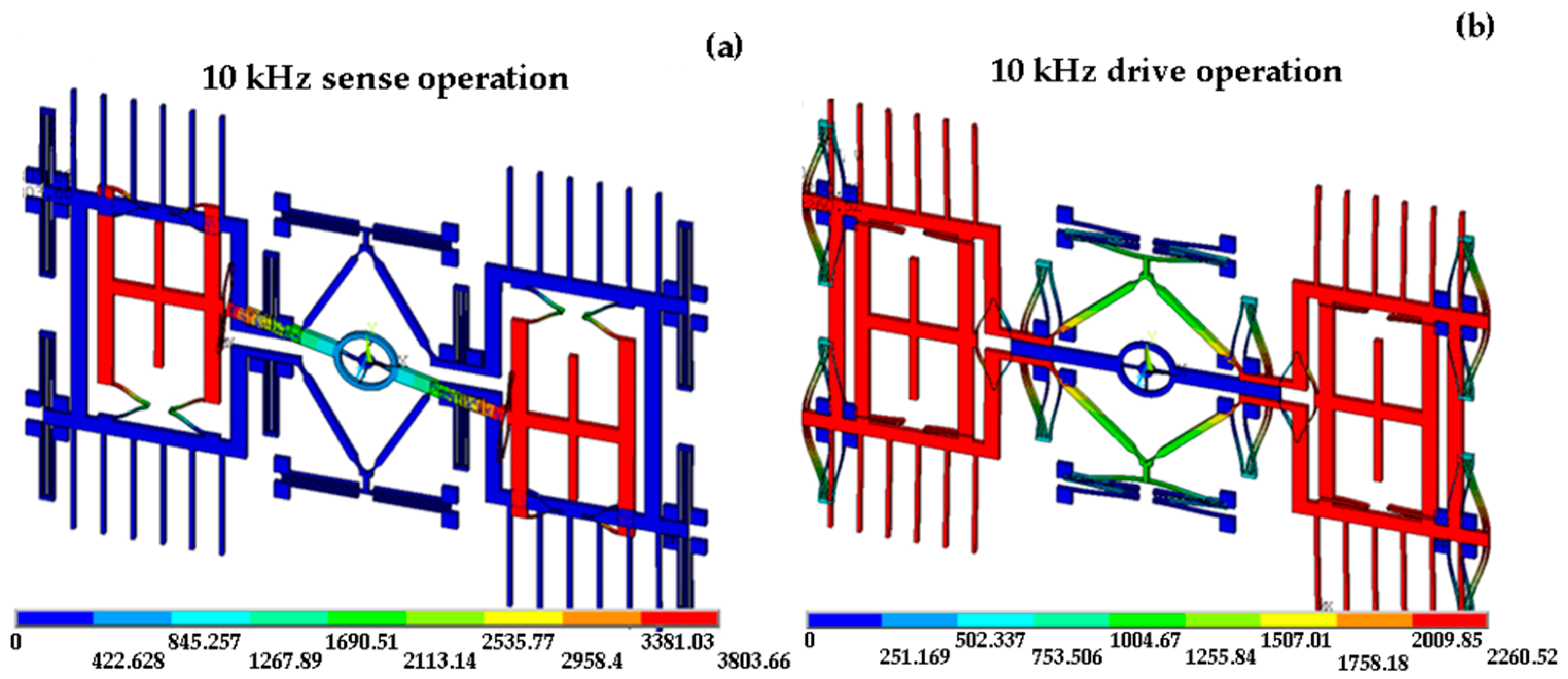
The TFG design model was verified by finite element analysis (FEA) using ANSYS software. The dimensional parameters of the proof masses and the suspension beams were investigated to reach the optimally designed mechanical structure of the TFG, since the vibration modes are strongly dependent on these parameters. The modal simulation results for the drive and sense vibration modes of the micro-gyroscope are shown in
Figure 2. The resonant frequencies of the driving and sensing modes were determined to be 9.788 and 9.761 kHz, respectively. Thus, the sensor bandwidth was evaluated to be 27 Hz. This bandwidth value satisfies the requirement of both the sensitivity and response time related to the gyroscope operation [
19].
Other analysis results of the vibrating modes (not shown in this paper) showed that the higher unwanted modes have frequencies far greater than 15.4 kHz. Thus, there is a difference of about 57.5% between the two sensing and driving modes and the higher parasitic ones. It means that the crosstalk effect can be suppressed. Thus, the designed architecture using the mechanical coupling between driving and sensing proof masses exhibits the desired operation features.
As mentioned above, the structure design of the TFG utilizes a set of interdigitated comb capacitors based on the variable area for large-stroke lateral actuation. For a parallel-plate actuator structure with
N plates on each side, with thickness
t, overlap length
L and plate gap
g, the total electrostatic drive force in a balanced actuation scheme is given by [
19]:
where
VDC is the constant bias voltage applied to the moving fingers and
VAC is the time-varying voltage applied to the fixed ones. We calculated the electrostatis force with
VAC = 10 V,
VDC = 11 V and used them as the input parameters for the simulation.
As shown in the design model, the principle of differential detection is employed by symmetrically placing capacitive electrodes on two opposing sides of the inner mass frames, so that the capacitance change in the electrodes is in opposite directions. It means that a fully differential capacitive bridge is formed. The change in capacitance for an electrode set with
N fingers on each side can be calculated as:
Where
Y is the displacement of the sensing electrode in the motion direction.
In fact, for the design of the sensing capacitive structure, there are two gaps, one of which is a smaller one corresponding to g, and the other is larger on the opposite side. Here, g = 2.5 μm, which is compliant with the resolution of photolithography. In order to optimize the large gap for the arrangement of the sensing fingers, several calculations were performed. Fixing a displacement of 1 µm in the sensing motion, a maximum large gap of 7 µm was determined by relying on the calculation of the change in capacitance ΔC using Equation (2). Subsequently, the total gap between the two adjacent fingers on one side of the interdigitated capacitor set is 12.5 µm. The maximum change in capacitance within the above limited condition, calculated by applying Equation (2), is in the range between 0.1 to 0.4 pF.
The structure parameters and calculated characteristics of the TFG are shown in
Table 1.
The operation principle of the TFG is based on a tuning fork’s response to the rotation. A z-axis input rotation signal perpendicular to the device plane causes a Coriolis-induced transfer of energy to the sense vibration mode. The resulting in-plane displacement along the y-axis is sensed capacitively at sense electrodes attached to the inner frame of the proof mass.
The designed micro-gyroscope is aimed at operating in non-vacuum-packaged conditions. In the micro-gyroscope’s performance, air damping is considered to be the dominant damping mechanism which includes slide-film damping and squeeze-film damping. In this study, both the driving and sensing masses were designed to move in-plane, which results in limiting the squeeze-film damping.
To eliminate the limitation of the slide-film air damping in this design, the part of the silicon substrate underneath the movable structures of the TFG was removed, which resulted in a freestanding architecture. This enabled high Q-factors for both the driving and sensing modes at atmospheric pressure.
In the mentioned gyroscope performance, air damping is considered to be the dominant damping mechanism which includes slide-film damping and squeeze-film damping. Slide-film damping, or lateral damping, occurs when two plates of an area A, separated by a distance d, slide parallel to each other. The lateral damping coefficient can be expressed as:
The effective viscosity μ
eff is approximated as [
20]:
The Knudsen number
Kn is the measure of the gas rarefaction effect, which is a function of the gas mean free path λ and the gap
d:
Squeeze-film damping occurs when two parallel plates move toward each other and squeeze the air film in between them. The effective viscosity μ
eff in squeeze-film damping is given as [
20]:
The squeeze-film damping coefficient is calculated as:
Based on model parameters as shown in
Table 1 and the desired working pressure (atmospheric pressure), we calculated the damping coefficients to estimate the quality factors of the TFG.
To obtain a large Coriolis force and a detectable signal in the sense mode, large quality factors in the drive and sense modes are required. In order to get a high quality factor with the micro-gyroscope still operated in air, the damping effect must be reduced. In our micro-gyroscope, both the driving mass and sensing mass are designed to move parallel to the silicon substrate. In the air gaps between the movable part and fixed part of driving and sensing, the dominant viscous damping is slide-film damping between the proof mass and the silicon substrate. By removing a part of the silicon substrate under the movable structure, the slide-film damping was removed, which enabled high
Q-factors for both the driving and sensing modes at atmospheric pressure. As shown in
Figure 1, all the substrate underneath the moving part of the micro-gyroscope was removed.
The quality factor (
Q) in each operation mode is a critical design parameter of the TFG. A high
Q in the drive mode is necessary to get a large drive mode vibration amplitude using a small drive voltage, and a high
Q in the sensing mode contributes to improved rate resolution. Based on the above damping model, we calculated the damping coefficients with the Couette-type model. In the drive mode, the damping coefficient
Cdrive is the total of the slide damping caused by the combs’ structure. Meanwhile, in the sensing mode, the damping coefficient
Csense is related to only the squeeze damping of the sensing combs as variable-gap capacitive detection in the sense mode is applied. Under the atmospheric air condition,
Qdrive and
Qsense are calculated to be:
where k
drive,
Mdrive and
ksense,
Msense are the stiffness and weight of the driving mode and the sensing mode, respectively. All these parameters were calculated and are shown in
Table 1.
Table 2 shows the calculated damping coefficients and quality factors of the drive and sensing modes for the non-freestanding and freestanding TFG.
In order to evaluate the sensitivity of the micro-gyroscope, we simulated the sensing displacement depending on the input angular rate. From this calculated displacement, we derived the sensitivity of the sensor by calculating the change of the capacitance using Equation (2). Here, we input the calculated damping coefficients as shown in
Table 2 to investigate the effect of damping on the sensing displacement for the two design cases. When applying an input angular rate of Ω
z = 10 rad/s, the sensing displacement and driving displacement of the TFG are 0.104 and 6.03453 μm, respectively. Compared with the non-freestanding TFG, the displacements in both operated modes at the resonant frequency are higher. The differences in the drive mode and sensing mode are 6% and 48%, respectively. Applying a range of input angular rates on the structure, we received the dependence of the sensing displacement on the input angular rate for the freestanding micro-gyroscope structure, as shown in
Figure 3a.
Figure 3b shows the dependence of the change in the output capacitance on the input angular rate of the micro-gyroscope. The change in capacitance was calculated using Equation (2). The sensitivity of the two micro-gyroscope structures is shown in
Table 2. The results show the sensitivity of the freestanding TFG was evaluated to be 0.034 pF/rad/s, which is 1.6 times higher than that of the non-freestanding TFG design.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}