
Two-Dimensional Magnetic Field Sensor Based on Silicon Magnetic Sensitive Transistors with Differential Structure

Abstract
:1. Introduction
2. Basic Structure and Operation Principle
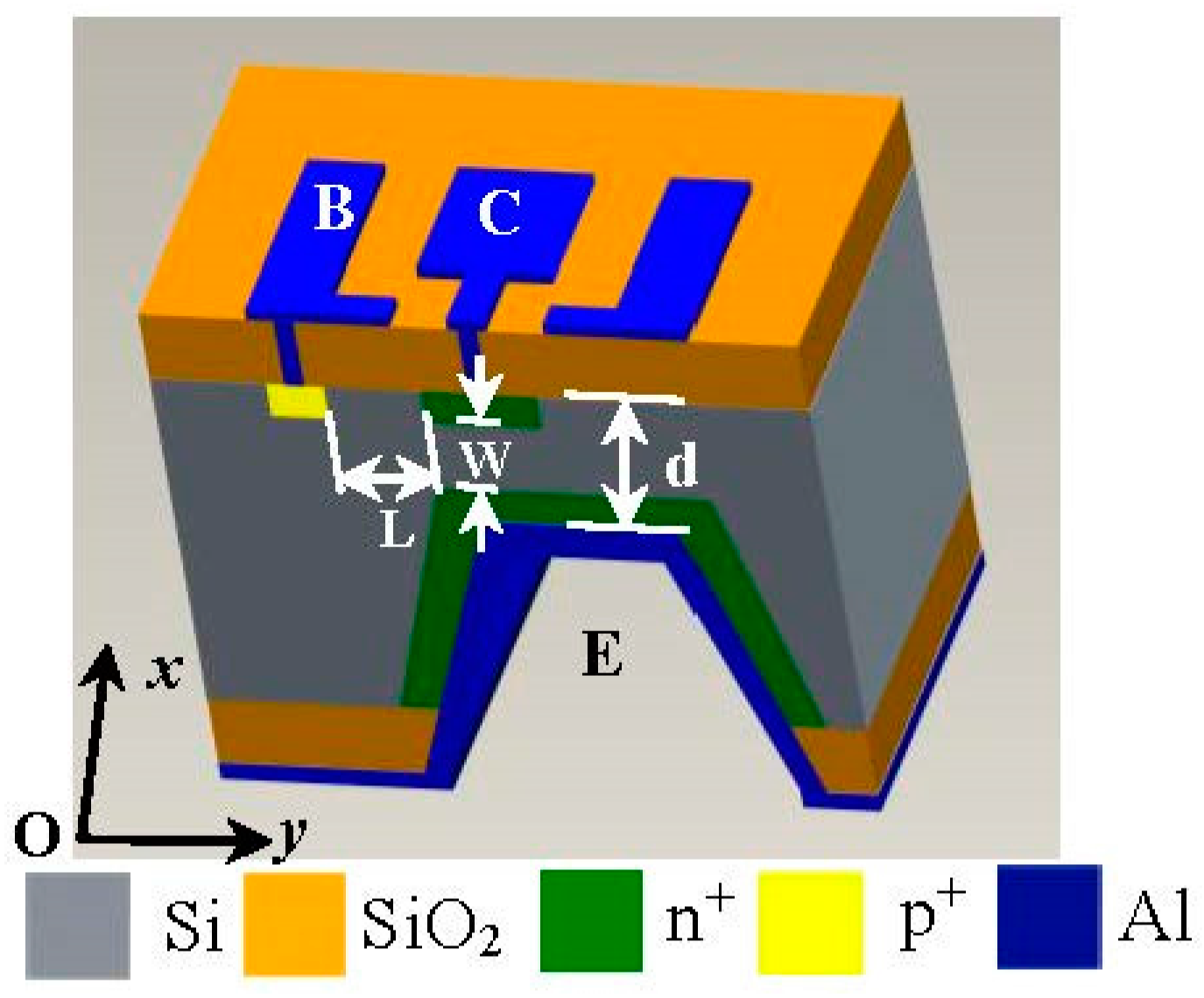
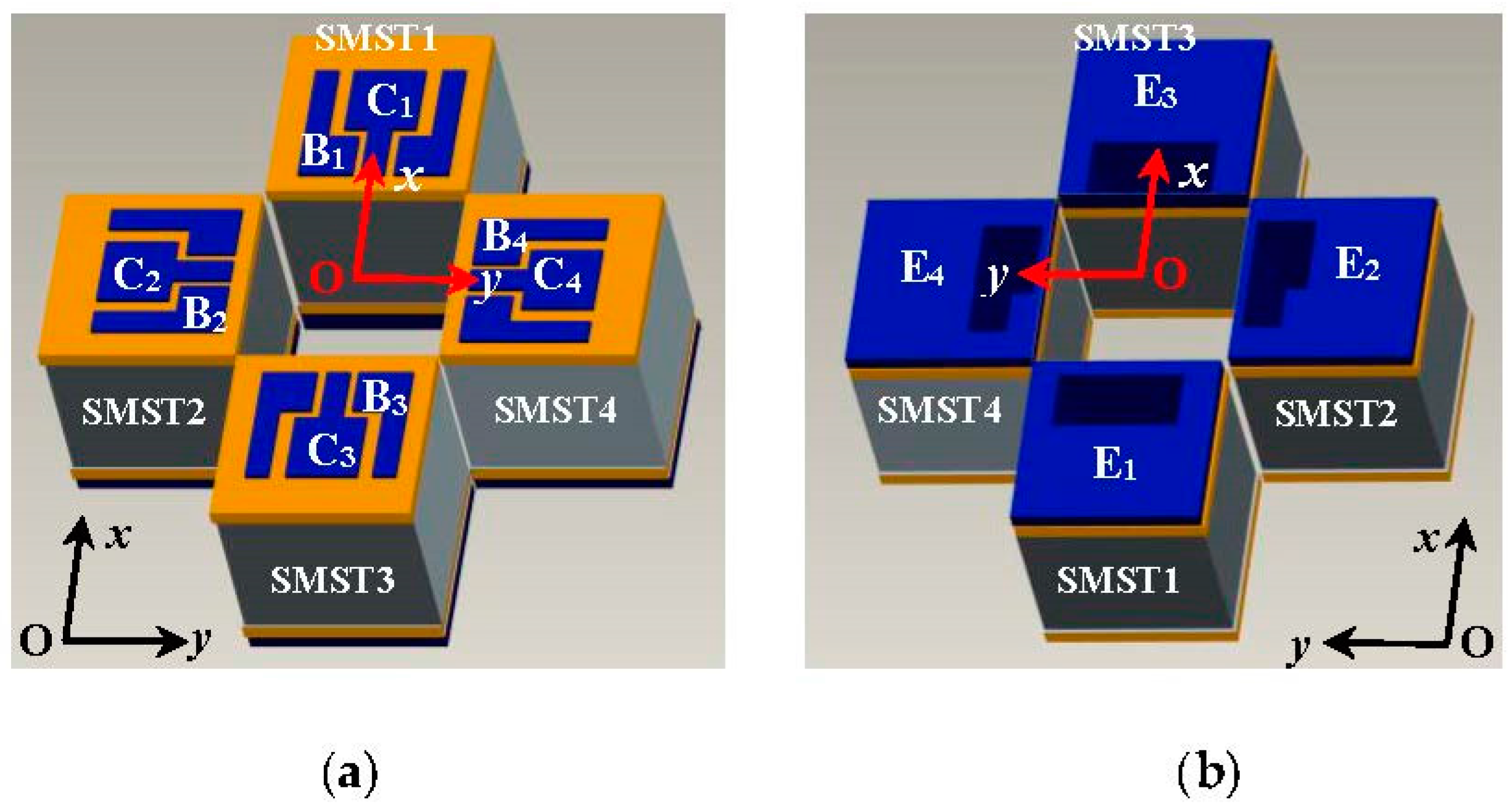
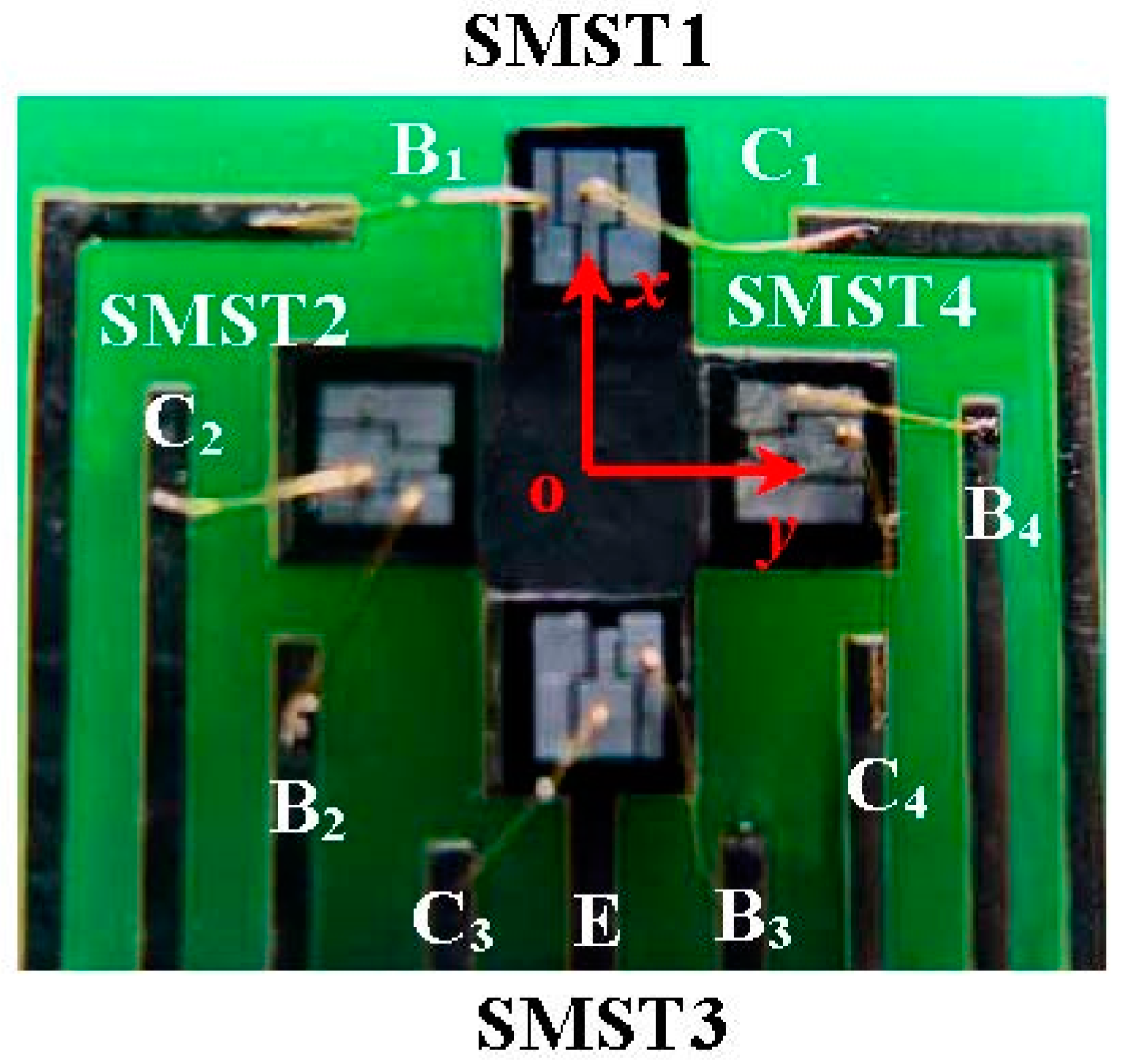
2.1. Basic Structure
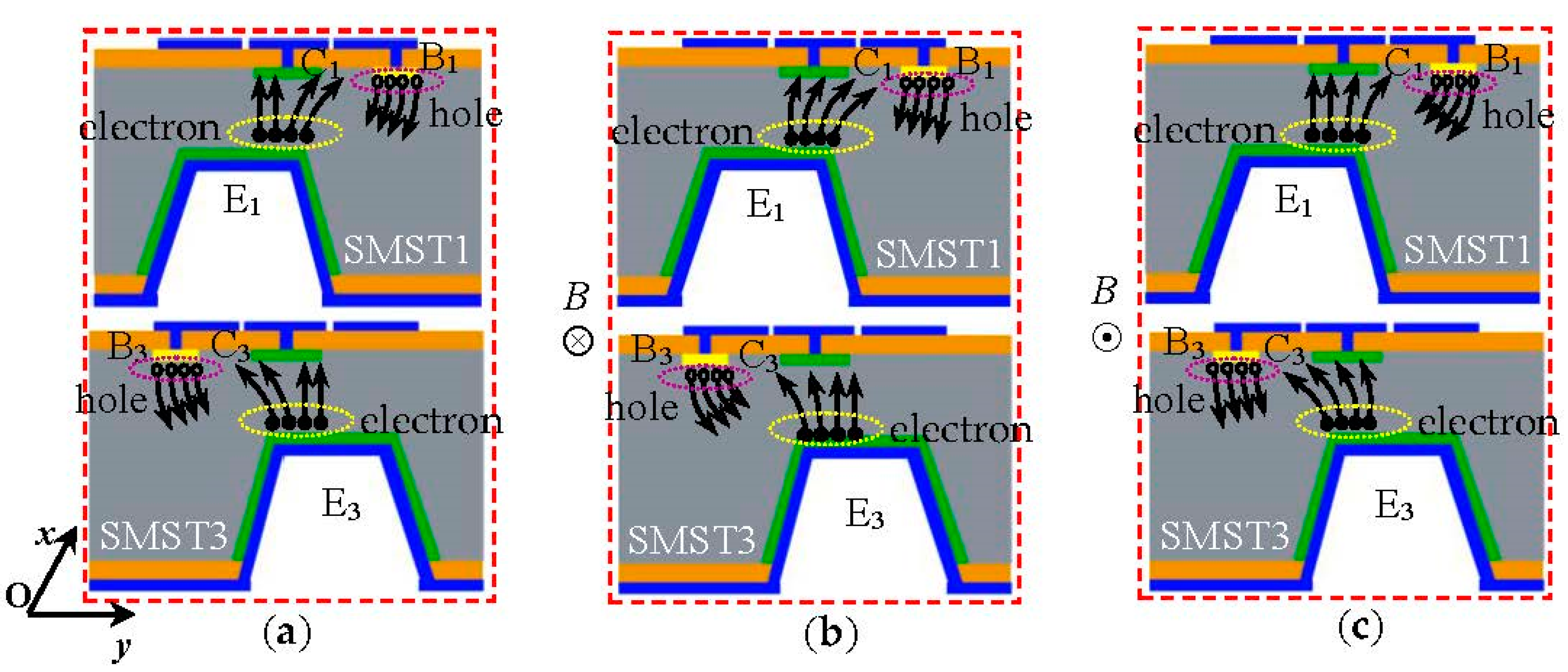
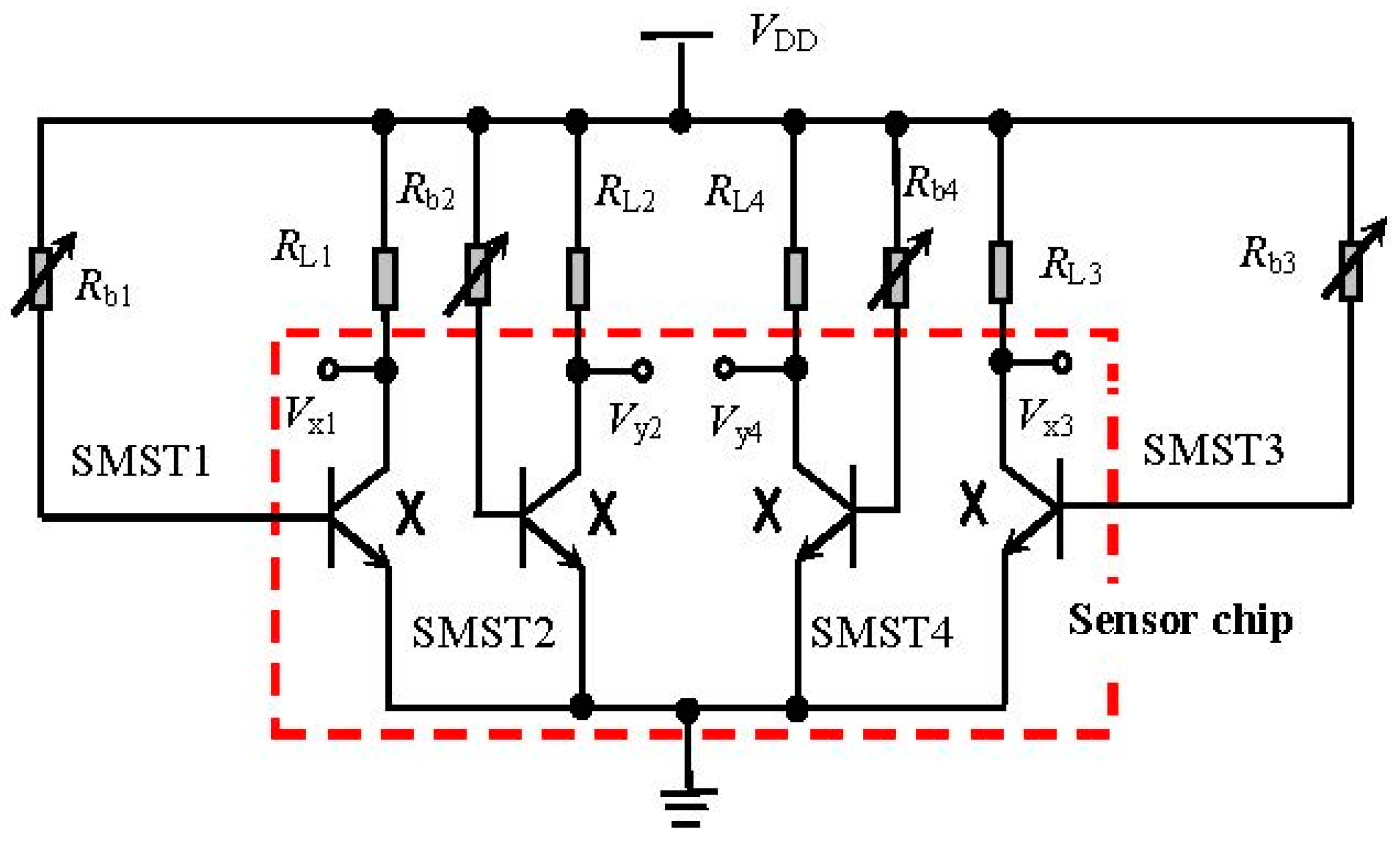
2.2. Operation Principle
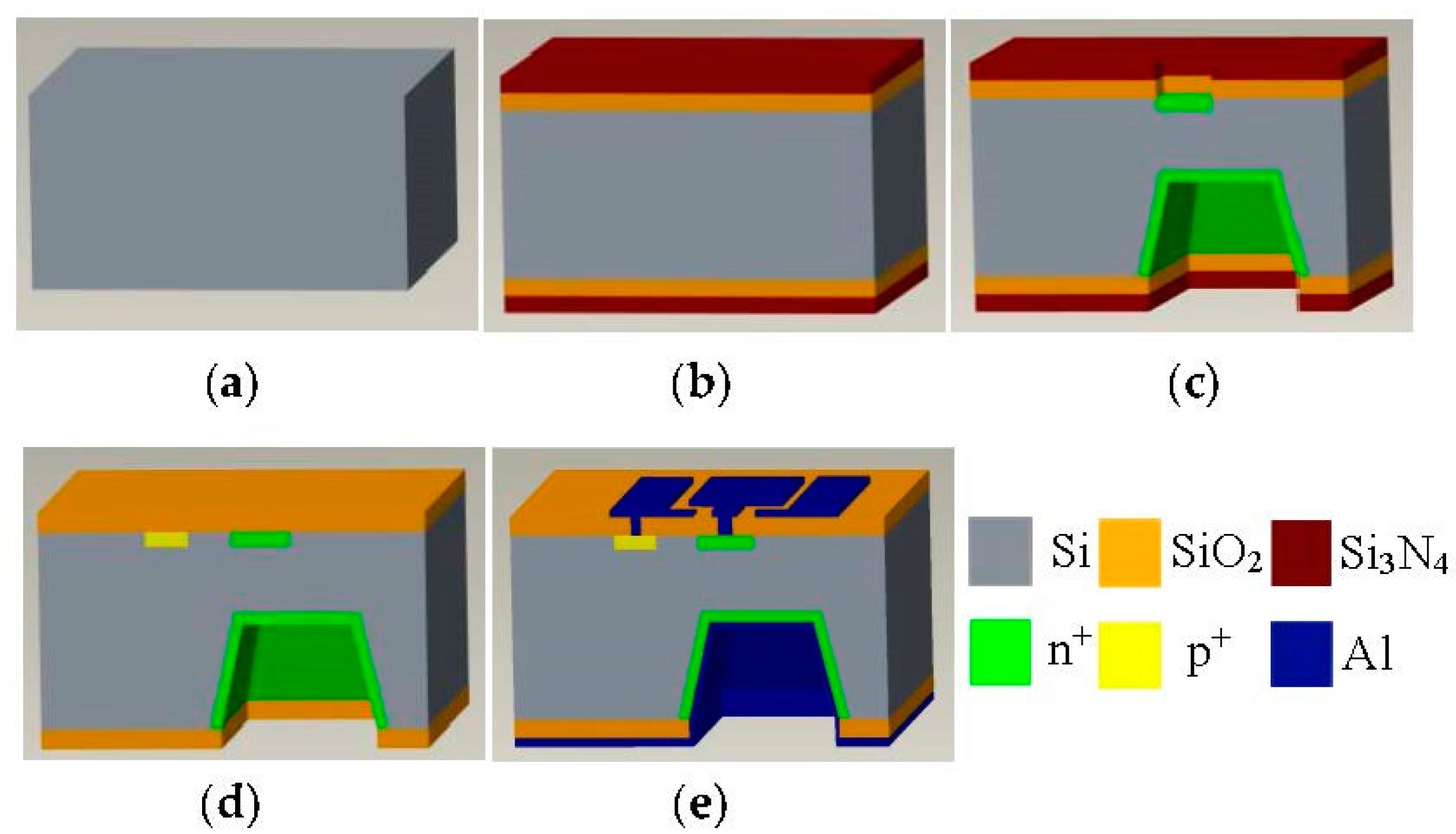
3. Fabrication Technology
4. Results and Discussion
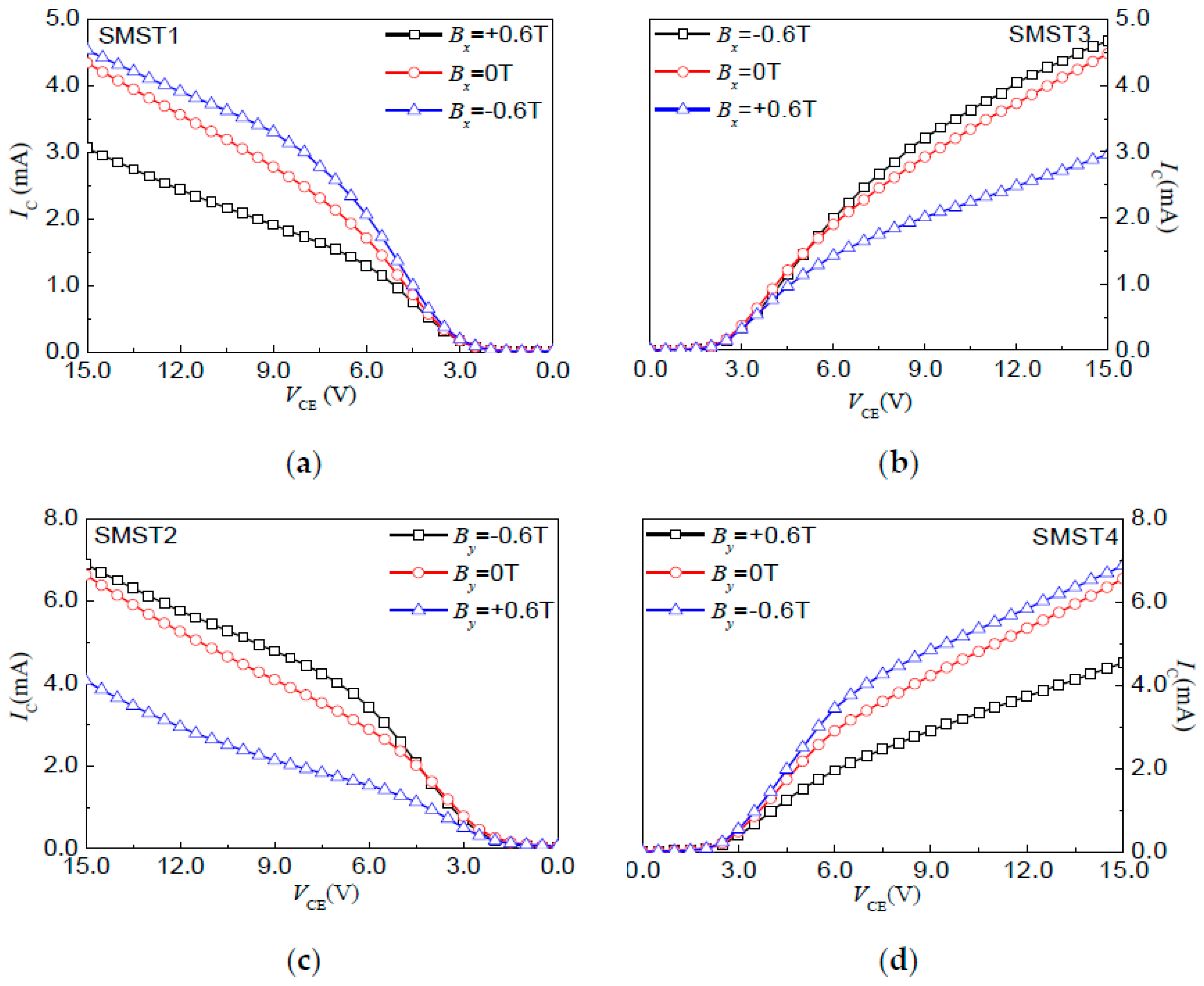
4.1. Magnetic Sensitive Characteristics of SMSTs
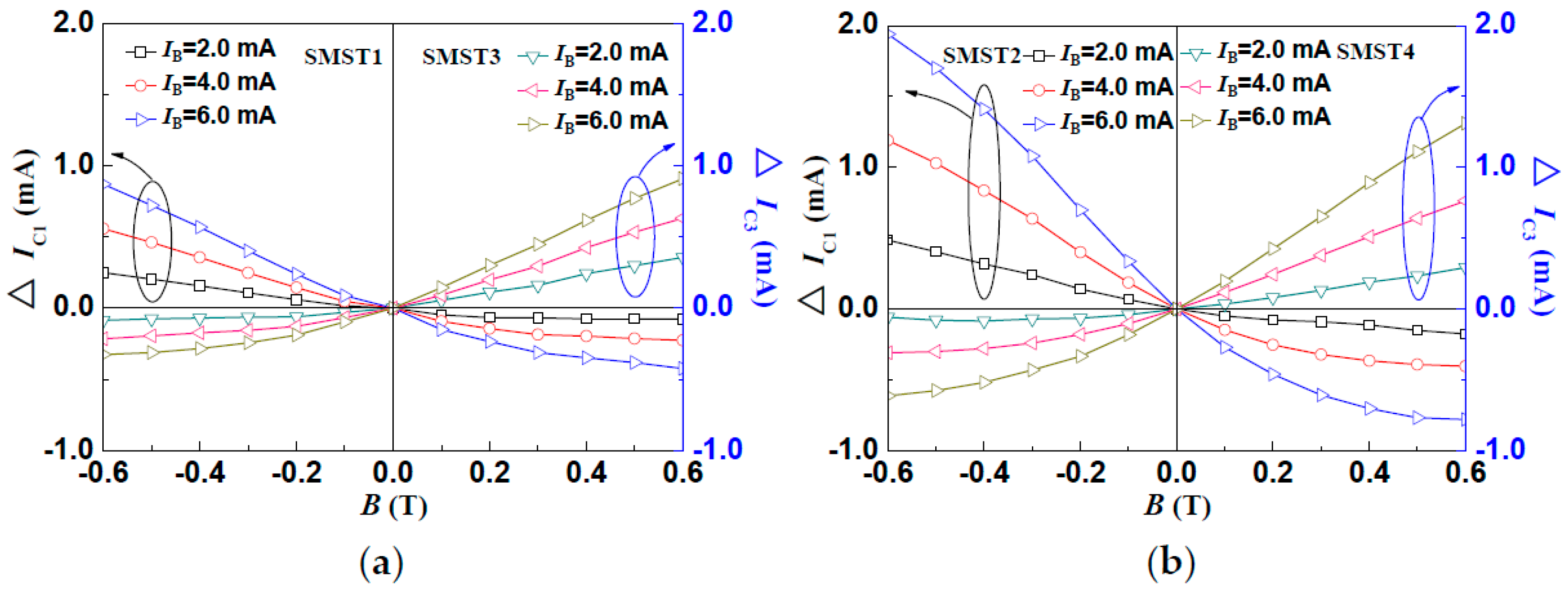
4.2. 2D Magnetic Sensitive Characteristics
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Almeida, M.J.; Götze, T.; Ueberschär, O.; Matthes, P.; Müller, M.; Ecke, R.; Exner, H.; Schulz, S.E. Monolithic integration of 2D spin valve magnetic field sensors for angular sensing. Mater. Today Proc. 2015, 2, 4206–4211. [Google Scholar] [CrossRef]
- Roumenin, C.S. 2D magnetodiode sensors based on SOS technology. Sens. Actuators A 1996, 54, 584–588. [Google Scholar] [CrossRef]
- Shapovalov, G.; Chektybayev, B.; Sadykov, A.; Skakov, M.; Kupishev, E. Experimental measurement of magnetic field null in the vacuum chamber of KTM tokamak based on matrix of 2D Hall sensors. Fusion Eng. Des. 2016, 112, 432–439. [Google Scholar] [CrossRef]
- Zhao, X.F.; Li, B.Z.; Wen, D.Z. Fabrication technology and characteristics of a magnetic sensitive transistor with nc-Si:H/c-Si heterojunction. Sensors 2017, 17, 212. [Google Scholar] [CrossRef] [PubMed]
- Roumenin, C.S.; Nikolov, D.; Ivanov, A. A novel parallel-field Hall sensor with low offset and temperature drift 2D integrated magnetometer. Sens. Actuators A 2004, 115, 303–307. [Google Scholar] [CrossRef]
- Lozanova, S.A.; Roumenin, C.S. A novel magnetometer based on a parallel-field silicon Hall sensor. Procedia Chem. 2009, 1, 847–850. [Google Scholar] [CrossRef]
- Zhao, X.F.; Wen, D.Z. Negative-resistance oscillations characteristics of a new type silicon magnetic sensitive transistor on MEMS. J. Semicond. 2005, 6, 1214–1217. [Google Scholar]
- Zhao, X.F.; Wen, D.Z. Fabrication–technology research of new type silicon magnetic-sensitive transistor. Rare Met. Mater. Eng. 2006, 12, 492–494. [Google Scholar]
- Zhao, X.F.; Wen, D.Z.; Pan, D.Y.; Guan, H.Y.; Lv, M.W.; Li, L. Differential structure and characteristics of new type silicon magnetic sensitivity transistor. Chin. Phys. Lett. 2013, 30, 088501. [Google Scholar] [CrossRef]
- Zhao, X.F.; Yang, X.H.; Yu, Y.; Wu, T.; Wen, D. Characteristics of 2D magnetic field sensor based on magnetic sensitivity diodes. Am. Inst. Phys. Adv. 2015, 5, 041321. [Google Scholar] [CrossRef]
- Lozanova, S.; Roumenin, C. Angular position device with 2D low-noise Hall microsensor. Sens. Actuators A 2010, 162, 167–171. [Google Scholar] [CrossRef]
- Yu, C.P.; Sung, G.M. Two-dimensional folded CMOS Hall device with interacting lateral magnetotransistor and magnetoresistor. Sens. Actuators A 2012, 182, 6–15. [Google Scholar] [CrossRef]
- Janković, N.; Pantić, D.; Batcup, S.; Igic, P. A lateral double-diffused magnetic sensitive metal-oxide-semiconductor field-effect transistor with integrated n-type Hall plate. Appl. Phys. Lett. 2012, 100, 263507. [Google Scholar] [CrossRef]
- Lozanova, S.V.; Noykov, S.A.; Ivanov, A.J.; Roumenin, C.S. 2D in-plane Hall sensing based on a new microdevice couple concept. Procedia Eng. 2015, 120, 820–923. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure | Technology | Sensitivity | Reference |
|---|---|---|---|
| Magneto-diode | SOS | 0.46 μA/mT | [2] |
| Hall sensor | Simple planar | 41 V/AT, 30 V/AT | [5] |
| Hall sensor | CMOS | 19 V/AT, 19 V/AT | [6] |
| Diode | Bipolar | 544 mV/T, 498 mV/T | [10] |
| Hall device | CMOS | 9.564 mV/T | [12] |
| Transistor a Hall plate | CMOS | 30%/T | [13] |
| Hall element | Bipolar IC | 39 V/AT | [14] |
| Transistor | MEMS | 366 mV/T, 365 mV/T | In this work |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Zhao, X.; Bai, Y.; Lv, M.; Wen, D. Two-Dimensional Magnetic Field Sensor Based on Silicon Magnetic Sensitive Transistors with Differential Structure. Micromachines 2017, 8, 95. https://doi.org/10.3390/mi8040095
Yang X, Zhao X, Bai Y, Lv M, Wen D. Two-Dimensional Magnetic Field Sensor Based on Silicon Magnetic Sensitive Transistors with Differential Structure. Micromachines. 2017; 8(4):95. https://doi.org/10.3390/mi8040095
Chicago/Turabian StyleYang, Xianghong, Xiaofeng Zhao, Yunjia Bai, Meiwei Lv, and Dianzhong Wen. 2017. "Two-Dimensional Magnetic Field Sensor Based on Silicon Magnetic Sensitive Transistors with Differential Structure" Micromachines 8, no. 4: 95. https://doi.org/10.3390/mi8040095
APA StyleYang, X., Zhao, X., Bai, Y., Lv, M., & Wen, D. (2017). Two-Dimensional Magnetic Field Sensor Based on Silicon Magnetic Sensitive Transistors with Differential Structure. Micromachines, 8(4), 95. https://doi.org/10.3390/mi8040095